Область техники, к которой относится изобретение
Изобретение относится к машинам для внедорожных работ и разгрузке машины для внедорожных работ, и, в частности, к системе и способу управления разгрузкой лесотехнической машины.
Уровень техники
Лесотехнические машины используются при механизированной лесозаготовке для валки, очистки от сучьев, резки в размер (раскряжевки), сбора, транспортировки и складирования лесоматериала. К лесотехническим машинам относятся, например, лесозаготовительные машины (харвестеры), погрузочно-транспортные машины (форвардеры) и их сочетания, так называемые лесные комбайны. Харвестеры используются при механизированной лесозаготовке для валки, очистки от сучьев, и раскряжевки. При помощи харвестеров лесоматериал обычно складируют на лесосеке в подходящие временные штабели по сортиментам. Соответственно, посредством форвардеров лесоматериал обычно собирают из временных штабелей, транспортируют к обочине дороги и выгружают в штабели. Лесные комбайны могут выполнять работу обоих видов машин, т.е. харвестера и форвардера.
Лесотехнические машины, такие как форвардеры и лесные комбайны представляют собой машины для внедорожных работ, которые собирают лесоматериал из разных временных штабелей для транспортирования к обочине дороги и выгрузки в разные штабели.
На обочине дороги штабели лесоматериала должны быть аккуратными, а торцы штабелей должны быть ровными. Ровность торцов штабелей - это вопрос безопасности, а также ровность желательна с эстетической точки зрения. Когда торцы штабелей ровные, легче переносить лесоматериал на дорожный транспорт для перевозки.
Традиционно используемый способ управления разгрузкой лесотехнической машины заключается в том, что водитель лесотехнической машины управляет разгрузкой лесоматериала в штабель посредством ручных органов управления. Водитель лесотехнической машины должен быть особенно внимателен, когда выравнивает торец штабеля лесоматериала. В международной заявке WO 2018/130747 А1 раскрыта известная система для управления разгрузкой лесотехнической машины. В европейском патентном документе ЕР2987399 А1 описана другая система для управления разгрузкой лесотехнической машины. Кроме того, в патентном документе Финляндии FI20145397A раскрыта известная система для управления конструкцией стрелы форвардера. Дополнительно, в полезной модели Финляндии FI7189U раскрыта известная система для управления машиной подачи лесоматериала. Однако, посредством описанных в упомянутых публикациях систем невозможно обеспечить достаточно ровную разгрузку лесоматериала в штабель. Процедура ровной разгрузки лесоматериала в штабель посредством известного ручного управления показала себя крайне затратной по времени и неудобной.
В самом деле, существует потребность в системе, которая обеспечивает более управляемый, быстрый и надежный результат при разгрузке лесоматериалов в штабели, чем прежние системы.
Раскрытие изобретения
Задача настоящего изобретения заключается в том, чтобы предложить новую разновидность системы для управления разгрузкой лесотехнической машины, посредством которой можно получить более управляемую, экономичную по времени и надежную процедуру выгрузки лесоматериалов в штабели, чем позволяли прежние процедуры, например, у обочины дорог, посредством чего могут быть минимизированы проблемы и недостатки процессов разгрузки лесоматериалов.
Отличием соответствующей изобретению системы для управления разгрузкой лесотехнической машины, которая содержит грузовое пространство для размещения груза лесоматериала, стрелу и манипулятор, а система дополнительно содержит управляющее устройство и измерительное устройство, является то, что измерительное устройство выполнено с возможностью измерения местоположения лесотехнической машины, угла поворота конструкции стрелы, положения отдельных частей стрелы и положения манипулятора; при этом: указанное управляющее устройство выполнено с возможностью: определять и фиксировать зону штабелирования; рассчитывать и фиксировать положение края штабеля лесоматериала (далее - штабеля); управлять манипулятором для захвата пачки лесоматериала из груза лесоматериала; вычислять расстояние торца выровненной по защитной перегородке пачки лесоматериала относительно манипулятора; рассчитывать место выгрузки пачки лесоматериала в зоне штабелирования, которая определена для штабеля; и управлять выгрузкой и выгружать указанную пачку лесоматериала в штабель в расчетном месте выгрузки посредством указанного управляющего устройства и измерительного устройства лесотехнической машины, так чтобы один край штабеля получался ровным и прямым.
Согласно предпочтительному варианту осуществления изобретения, измерительное устройство выполнено с возможностью измерения пространства перемещения отдельных частей конструкции стрелы.
Согласно предпочтительному варианту осуществления изобретения, измерительное устройство выполнено с возможностью измерения угла поворота манипулятора.
Согласно предпочтительному варианту осуществления изобретения, управляющее устройство выполнено с возможностью управления углом поворота стрелы, положением отдельных частей конструкции стрелы и положением манипулятора.
Согласно предпочтительному варианту осуществления изобретения, измерительное устройство выполнено с возможностью измерения положения средств захвата манипулятора.
Согласно предпочтительному варианту осуществления изобретения, управляющее устройство выполнено с возможностью распознавания положения и/или управления положением средств захвата манипулятора.
Согласно предпочтительному варианту осуществления изобретения, управляющее устройство выполнено с возможностью вычисления высоты штабеля на основании места выгрузки выгружаемых пачек лесоматериала.
Согласно предпочтительному варианту осуществления изобретения, управляющее устройство выполнено с возможностью автоматического определения местоположения лесотехнической машины и/или местоположения зоны штабелирования Согласно предпочтительному варианту осуществления изобретения, управляющее устройство выполнено с возможностью автоматического определения положения стрелы лесотехнической машины и/или угла поворота стрелы путем определения положения и/или пространства перемещения отдельных частей стрелы.
Согласно предпочтительному варианту осуществления изобретения, лесотехническая машина представляет собой форвардер.
Отличием соответствующего изобретению способа для управления разгрузкой лесотехнической машины, которая содержит грузовое пространство для размещения груза лесоматериала, стрелу и манипулятор, присоединенный к конструкции стрелы, является то, что способ содержит этапы: определения и сохранения в памяти зоны штабелирования; расчета и сохранения в памяти положения края штабеля; захвата посредством манипулятора пачки лесоматериала из груза лесоматериала; вычисления расстояния торца выровненной по защитной перегородке пачки лесоматериала относительно манипулятора; расчета места выгрузки пачки лесоматериала в зоне штабелирования, которая определена для штабеля; и управления выгрузкой и выгрузки указанной пачки лесоматериала в штабель в расчетном месте выгрузки посредством указанного управляющего устройства и измерительного устройства лесотехнической машины, так чтобы один край штабеля получался ровным и прямым.
Согласно предпочтительному варианту осуществления изобретения, зону штабелирования определяют и сохраняют в памяти путем захвата пачки лесоматериала из груза лесоматериала в грузовом пространстве, переноса и выгрузки указанной пачки лесоматериала на первом крае зоны штабелирования.
Согласно другому варианту осуществления изобретения, зону штабелирования определяют и сохраняют в памяти путем захвата первой пачки лесоматериала из груза лесоматериала в грузовом пространстве, переноса и выгрузки указанной пачки лесоматериала на первом краю зоны штабелирования, и путем захвата второй пачки лесоматериала из груза лесоматериала в грузовом пространстве, переноса и выгрузки указанной второй пачки лесоматериала на втором краю зоны штабелирования.
Согласно предпочтительному варианту осуществления изобретения, способ содержит этап управления манипулятором относительно защитной перегородки и записи в память местоположения указанной защитной перегородки.
Согласно предпочтительному варианту осуществления изобретения, в способе указанная лесотехническая машина представляет собой форвардер.
Краткое описание чертежей
Далее, некоторые варианты осуществления изобретения будут описаны более подробно на примере предпочтительных вариантов со ссылками на прилагаемые чертежи, на которых:
фиг. 1 в аксонометрии изображает лесотехническую машину, соответствующую варианту осуществления изобретения,
фиг. 2 представляет вид сверху, иллюстрирующий систему, соответствующую варианту осуществления настоящего изобретения, для управления разгрузкой лесоматериала из лесотехнической машины,
фиг. 3 изображает блок-схему системы управления разгрузкой лесотехнической машины, соответствующей варианту осуществления изобретения,
фиг. 4 изображает блок-схему алгоритма реализации способа, соответствующего варианту осуществления изобретения, для управления разгрузкой лесотехнической машины,
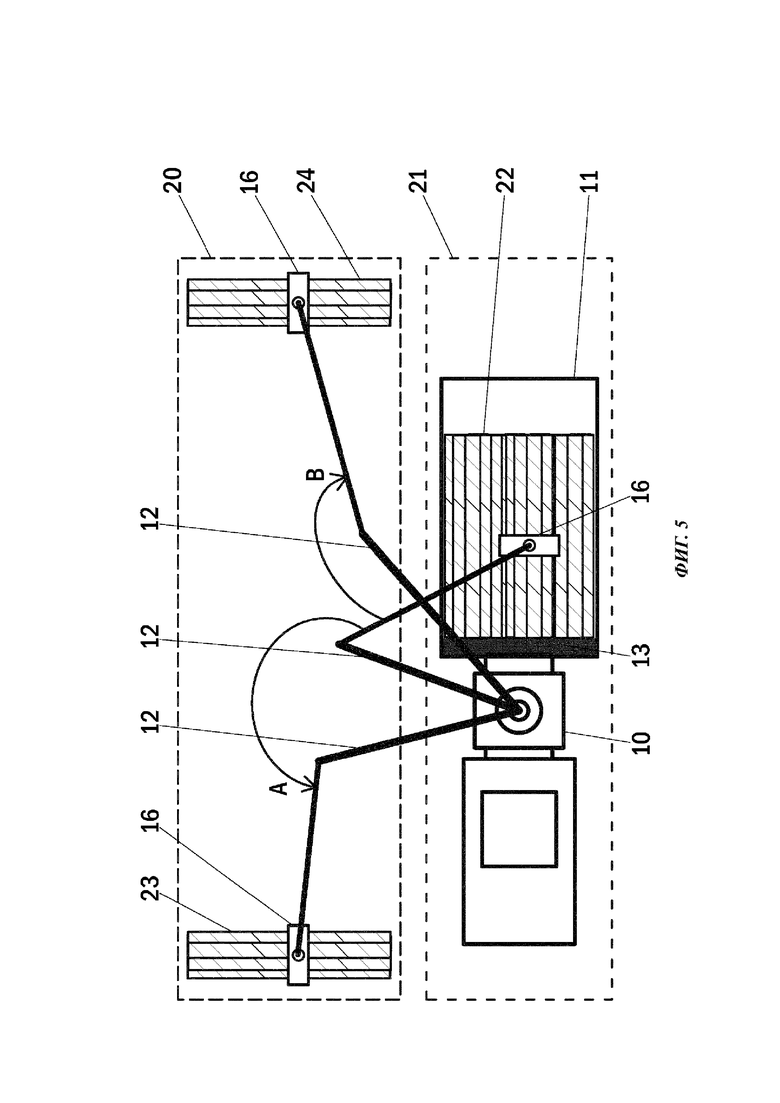
фиг. 5 представляет вид сверху, иллюстрирующий иную систему, соответствующую варианту осуществления настоящего изобретения, для управления выгрузкой лесоматериала из лесотехнической машины,
фиг. 6 изображает блок-схему алгоритма реализации способа, соответствующего иному варианту осуществления изобретения, для управления разгрузкой лесотехнической машины,
фиг. 7 представляет вид сверху, иллюстрирующий ситуацию разгрузки лесотехнической машины, соответствующую варианту осуществления изобретения,
фиг. 8 в аксонометрии изображает ситуацию разгрузки лесотехнической машины, соответствующую варианту осуществления изобретения,
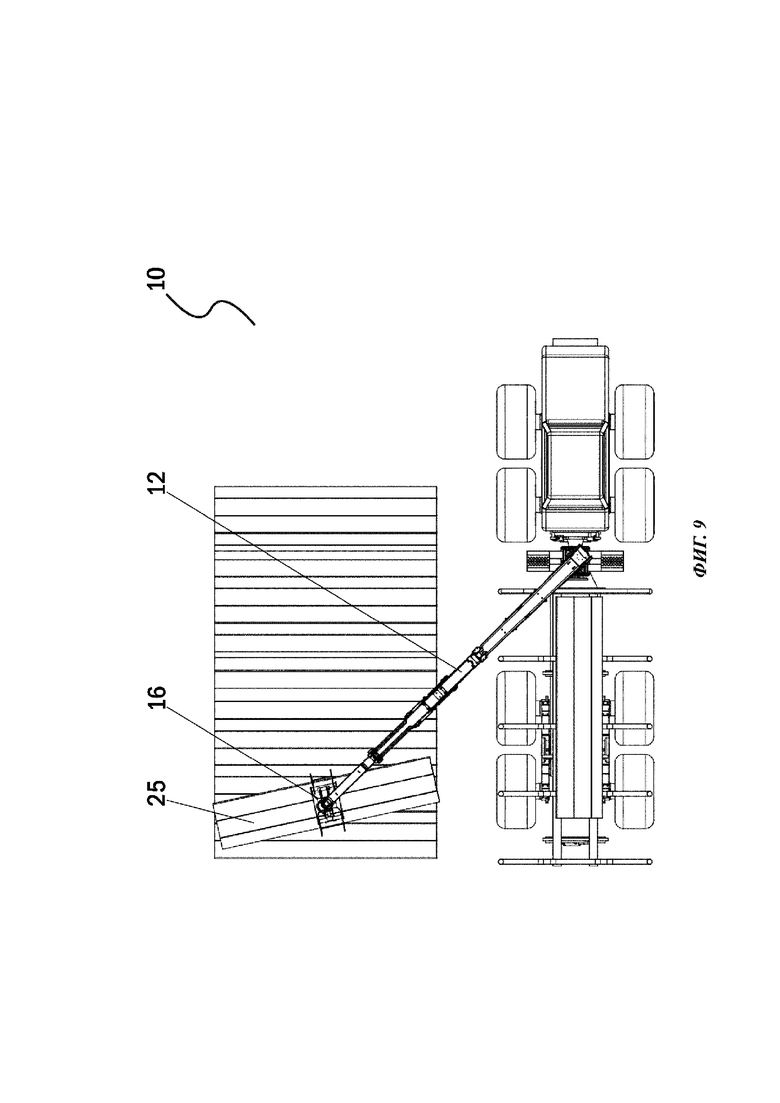
фиг. 9 представляет первый вид сверху, иллюстрирующий ход процесса разгрузки лесотехнической машины, соответствующий варианту осуществления изобретения,
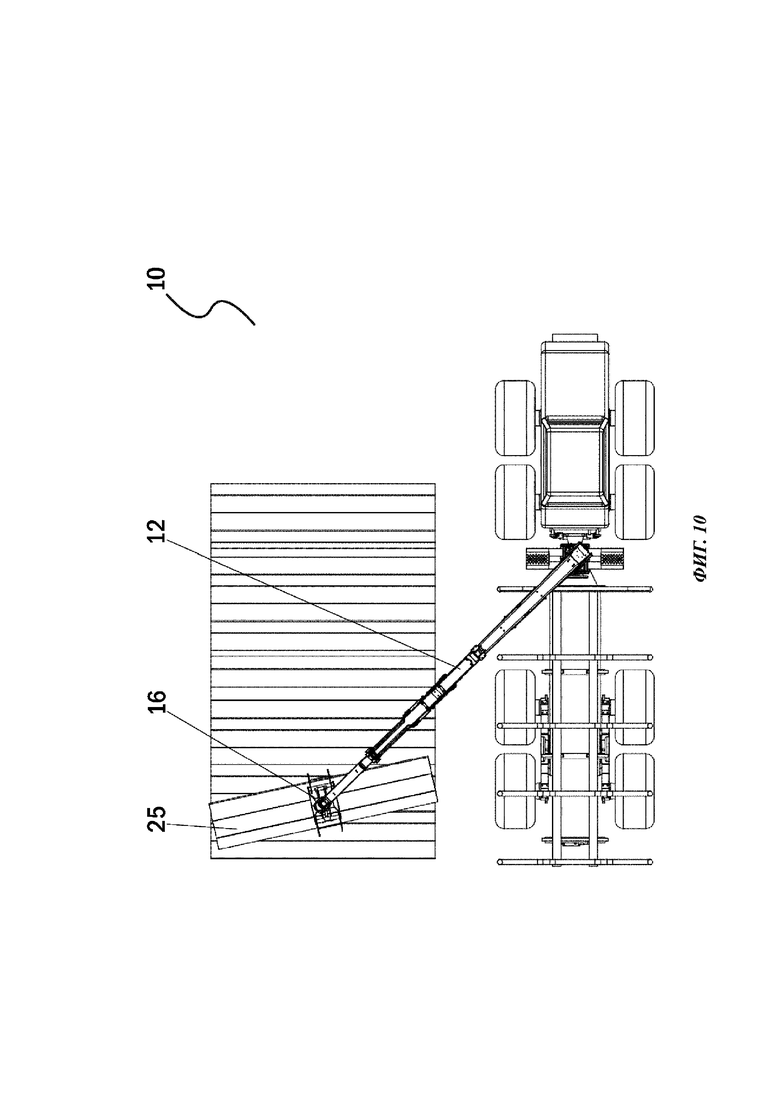
фиг. 10 представляет второй вид сверху, иллюстрирующий ход процесса разгрузки лесотехнической машины, соответствующий варианту осуществления изобретения,
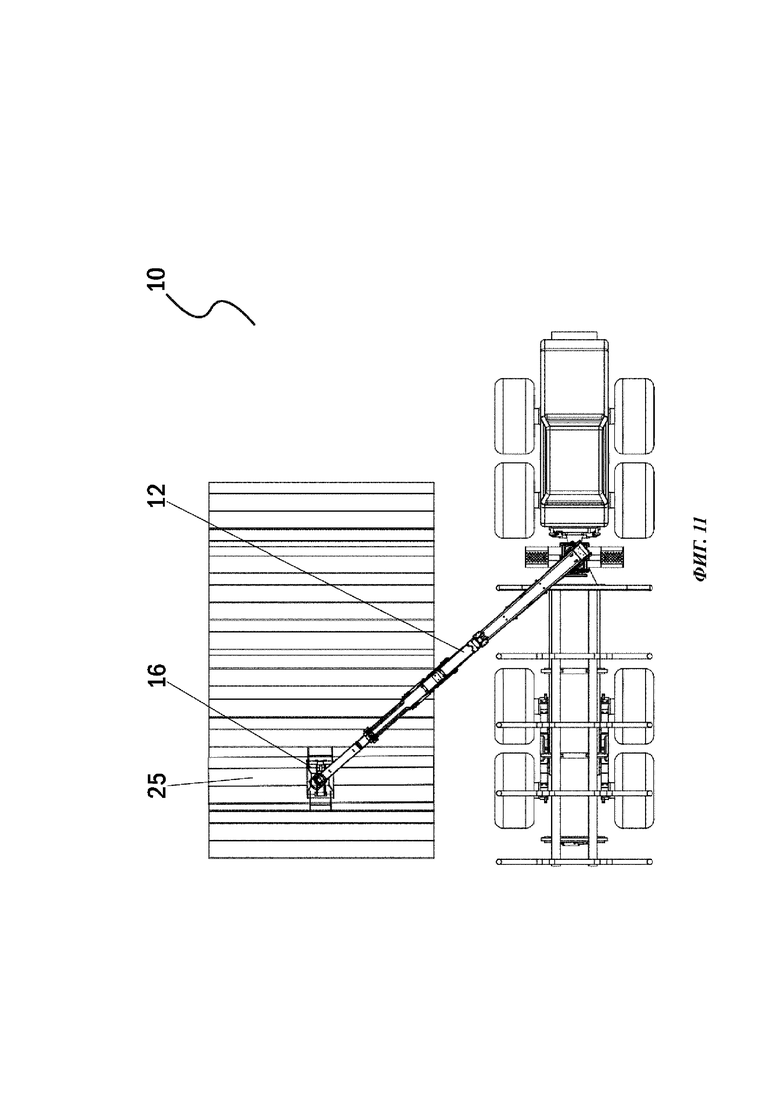
фиг. 11 представляет третий вид сверху, иллюстрирующий ход процесса разгрузки лесотехнической машины, соответствующий варианту осуществления изобретения.
Приведенные фигуры изображены не в масштабе, причем для наглядности основных признаков некоторые конструктивные элементы могут быть упрощены, выделены или опущены.
Осуществление изобретения
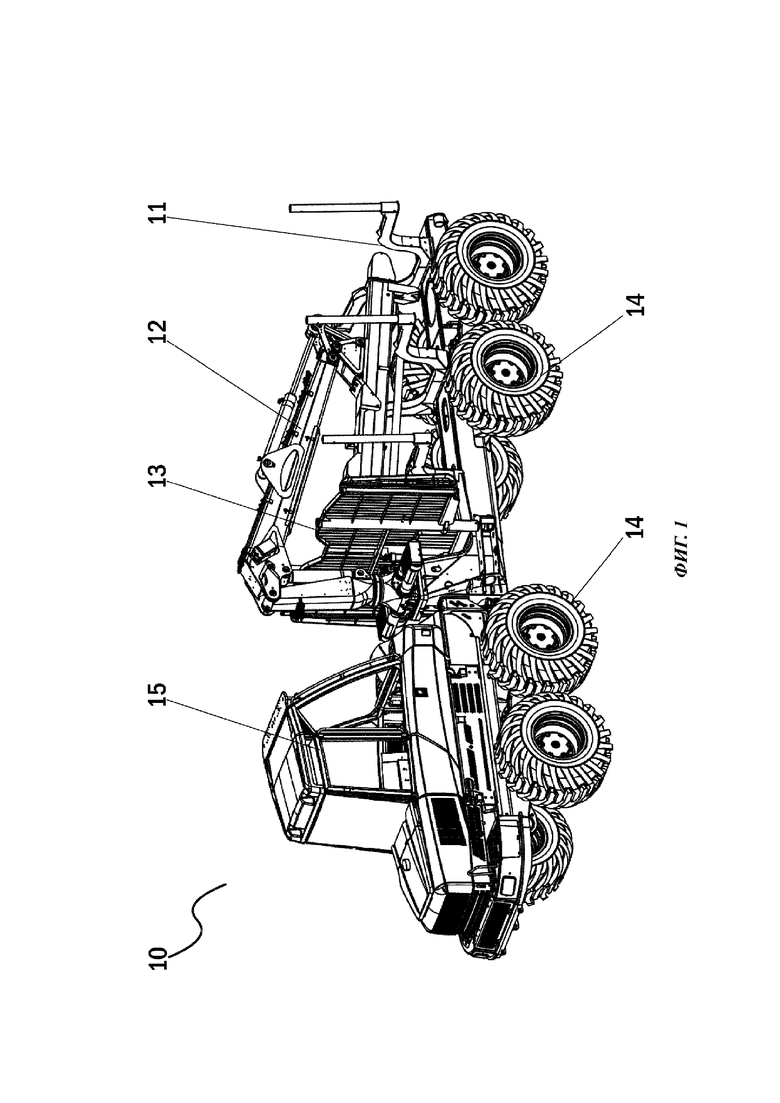
На фиг. 1 в аксонометрии изображена лесотехническая машина, соответствующая варианту осуществления настоящего изобретения. Фиг. 1 изображает лесотехническую машину 10, соответствующую варианту осуществления настоящего изобретения, а точнее - форвардер. Соответствующая изобретению лесотехническая машина 10 далее будет описана, как ненагруженная лесоматериалом. В различных вариантах осуществления лесотехническая машина 10 может представлять собой другой вид машины для лесного хозяйства, например, сочетание форвардера и харвестера или другую машину, пригодную для перевозки груза.
Лесотехническая машина 10, соответствующая варианту осуществления настоящего изобретения, может содержать грузовое пространство 11 для складирования штабеля лесоматериала, подлежащего перевозке.
Лесотехническая машина 10 может дополнительно содержать стрелу 12 и прикрепленный к стреле 12 манипулятор, такой как грейфер. Кроме того, лесотехническая машина 10 может содержать поворотное устройство, так называемый ротатор, установленный между стрелой 12 и указанным манипулятором. Дополнительно, лесотехническая машина 10 может содержать кабину 15 и защитную перегородку 13, расположенную за кабиной в грузовом пространстве 11. В соответствии с вариантом осуществления изобретения, лесотехническая машина 10 предназначена для сбора лесоматериала из временных штабелей в зоне валки леса для перевозки собранного лесоматериала к обочине дороги и для выгрузки лесоматериала в штабели.
Лесотехническая машина 10 может также содержать средства 14 передвижения, которые могут представлять собой по меньшей мере одно из следующих средств: колеса, установленные на оси, колеса, установленные на качающийся оси, колеса, установленные на сдвоенной оси, систему гусениц или другие средства известные как таковые для приведения лесотехнической машины в движение относительно рабочей поверхности. Для специалистов должно быть очевидно, что в типичном случае рабочая машина дополнительно содержит множество конструктивных и функциональных элементов и модулей, которые зависят от типа рабочей машины, например, источник энергии и т.п.
Лесотехническая машина 10, соответствующая варианту осуществления настоящего изобретения, может содержать систему для управления разгрузкой лесотехнической машины. Система управления разгрузкой лесотехнической машины служит помощником водителю при разгрузке груза 22 лесоматериала из лесотехнической машины 10, так что лесоматериал можно аккуратно разгружать в штабели в требуемой зоне 20 штабелирования.
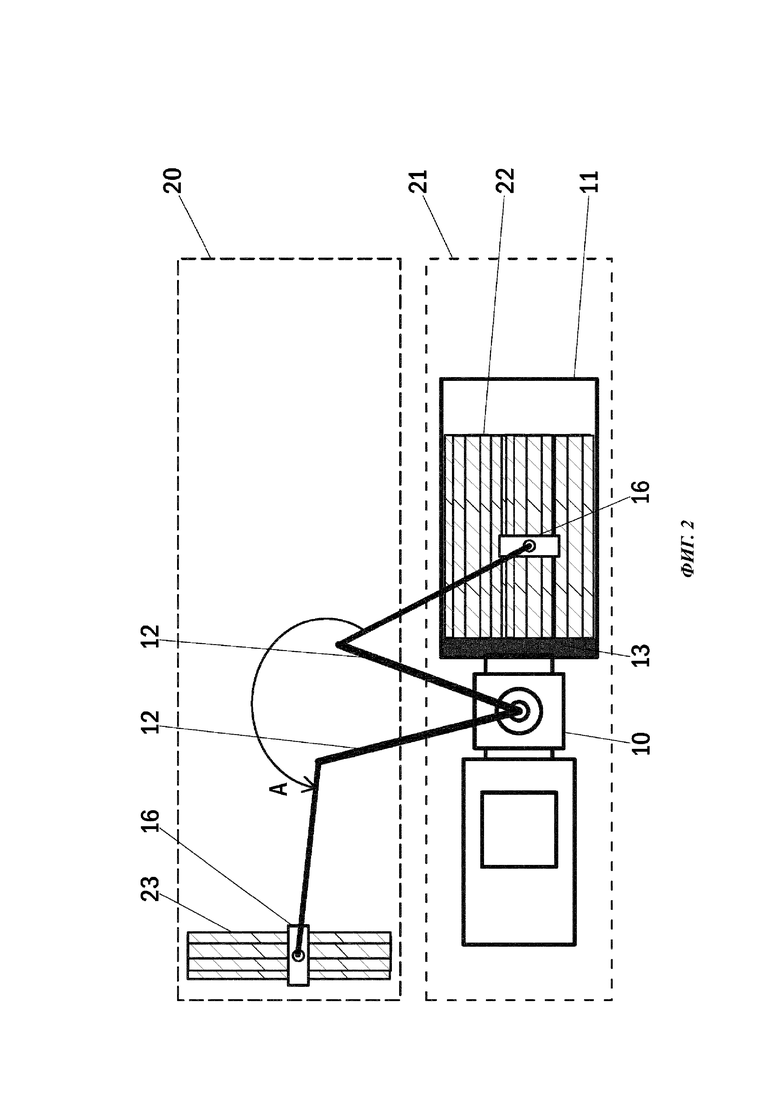
Фиг. 2 представляет вид сверху, иллюстрирующий систему, соответствующую варианту осуществления настоящего изобретения, для управления разгрузкой груза лесоматериала из лесотехнической машины. В системе, соответствующей варианту осуществления изобретения, водитель лесотехнической машины 10, например, форвардера, выбирает/определяет подходящую зону 20 штабелирования для штабеля лесоматериала, например, зону 20 штабелирования у обочины дороги. Водитель, управляя лесотехнической машиной 10, заводит лесотехническую машину в зону 21, расположенную рядом с зоной 20 штабелирования. В системе, соответствующей варианту осуществления изобретения, груз 22 лесоматериала в грузовом пространстве 11 лесотехнической машины 10 уже был выровнен на этапе погрузки так, чтобы торцы лесоматериала ровно прилегали к защитной перегородке 13 грузового пространства 11 лесотехнической машины 10.
В системе, соответствующей варианту осуществления изобретения, водитель лесотехнической машины 10 фиксирует (отмечает) местоположение зоны 20 штабелирования посредством стрелы 12 лесотехнической машины 10 и манипулятора 16, присоединенного к стреле 12. Такая разметка зоны 20 штабелирования может быть выполнена, например, если забрать пачку 23 лесоматериала из груза 22 лесоматериала, лежащего в грузовом пространстве 11 лесотехнической машины 10, перенести (как показывает стрелка А) и выгрузить пачку 23 на первом краю зоны 20 штабелирования, на левом краю на фиг. 2. В системе, соответствующей варианту осуществления изобретения, управляющее устройство лесотехнической машины 10 тогда понимает, что зона 20 штабелирования начинается от указанного места выгрузки пачки 23 лесоматериала. Управляющее устройство лесотехнической машины 10 может также понять, что направлением заполнения штабеля будет направление от места выгрузки пачки 23 лесоматериала к лесотехнической машине 10, начиная от левого края и направо, как на фиг. 2. В ином варианте водитель может указать управляющему устройству направление заполнения штабеля другим способом, например, отдельной командой или определенным заранее оговоренным движением органа управления. Если водитель хочет, то он может выровнять пачку 23 лесоматериала по защитной перегородке 13, если торцы лесоматериала не прилегали ровно к защитной перегородке 13. В предпочтительном варианте такое выравнивающее перемещение пачки лесоматериала по защитной перегородке может представлять собой автоматическое или полуавтоматической действие. В связи с этим действием, средства захвата манипулятора 16, например, когти грейфера приоткрывают, за счет чего отдельные элементы лесоматериала в пачке могут встать на один уровень с остальными элементами лесоматериала в пачке.
В системе, соответствующей варианту осуществления изобретения, управляющее устройство лесотехнической машины 10 всегда определяет положение манипулятора 16, и способно управлять положением манипулятора 16 и углом поворота манипулятора 16. Положение манипулятора может быть рассчитано на основе данных измерительного датчика, например, данных датчика стрелы, или каким-либо иным способом. Кроме того, управляющее устройство лесотехнической машины 10 выполнено с возможностью определения положения и/или управления положением средств захвата манипулятора 16, например, положением когтей грейфера.
Когда лесотехническая машина 10 при помощи манипулятора 16 забирает пачку лесоматериала из груза 22 лесоматериала в грузовом пространстве 11, управляющее устройство лесотехнической машины 10 заранее знает местоположение защитной перегородки 13, и таким образом также расстояние торца пачки лесоматериала, выровненной по защитной перегородке, относительно манипулятора 16. Управляющее устройство может определять местоположение защитной перегородки 13; например, водитель может, управляя манипулятором 16, прижать торцы лесоматериала к защитной перегородке, и дать команду управляющему устройству зарегистрировать местоположение защитной перегородки 13. Выравнивание пачки 23 лесоматериала может быть подтверждено закрыванием грейфера, так как в ходе выравнивания торцов манипулятор 16 должен был быть слегка открыт.
В системе, соответствующей варианту осуществления изобретения, когда лесотехническая машина 10 забирает пачку 23 лесоматериала из груза 22 лесоматериала в грузовом пространстве 11, измерительное устройство лесотехнической машины 10 измеряет и/или определяет расстояние торца пачки 23 лесоматериала, выровненной по защитной перегородке 13, относительно манипулятора 16. Когда лесотехническая машина 10 забирает пачку 23 лесоматериала из груза 22 лесоматериала в грузовом пространстве 11, управляющей системе лесотехнической машины 10 становится известно расстояние торца пачки 23 лесоматериала относительно манипулятора 16. Таким образом, благодаря измерительному устройству, управляющему устройству лесотехнической машины 10 известно расстояние манипулятора 16, например, грейфера, от защитной перегородки независимо от того, в каком месте груза 22 лесоматериала в грузовом пространстве 11 манипулятор забирает бревна. Когда водитель забирает первую пачку 23 лесоматериала для штабеля в зоне 20 штабелирования, и открывает грейфер манипулятора 16, управляющее устройство рассчитывает и фиксирует местоположение края штабеля. Затем управляющее устройство может помогать водителю брать каждую пачку лесоматериала на точном расстоянии от лесотехнической машины, при этом край штабеля становится ровным и прямым.
В системе, соответствующей варианту осуществления изобретения, управляющее устройство лесотехнической машины 10 может также вычислять высоту пачки лесоматериала на основе места предыдущей выгрузки пачек 23 лесоматериала манипулятором 16, и таким образом практически точно корректировать высоту выгрузки манипулятора 16 для каждой пачки 23 лесоматериала. В системе, соответствующей варианту осуществления изобретения, управляющее устройство лесотехнической машины 10 может управлять углом поворота манипулятора 16, например, посредством угла поворота ротатора. Следовательно, управляющему устройству лесотехнической машины 10 также известно точное направление пачки лесоматериала, и система может поворачивать лесоматериал в пачке 23 автоматически параллельно штабелю, при этом лесоматериал пачки 23 располагаются под углом 90° относительно боковой стороны штабеля.
Когда в системе, соответствующей изобретению, зона 20 штабелирования оказывается обозначенной, управляющее устройство лесотехнической машины 10 автоматически оказывает помощь в управлении и выгрузке груза 22 лесоматериала. Управляющее устройство лесотехнической машины 10 рассчитывает подходящее место выгрузки для каждой пачки лесоматериала, взятой из груза 22 лесоматериала в грузовом пространстве 11 лесотехнической машины 10 посредством манипулятора 16, и управляет пачками лесоматериала по одной пачке в каждый отдельно взятый момент времени, укладывая пачки в расчетное место выгрузки аккуратно в штабель. Следовательно, в намеченной зоне 20 штабелирования может быть создан ровный и/или прямой с одного края штабель лесоматериала. Когда груз 22 лесоматериала будет выгружен в штабель в зоне 20 штабелирования, лесотехническая машина 10 может уехать, чтобы взять новый груз лесоматериала в зоне валки леса.
В системе, соответствующей варианту осуществления изобретения, лесотехническая машина 10 возвращается с новым грузом лесоматериала обратно в точку, близкую к зоне 20 штабелирования на обочине дороги. Когда водитель управляет лесотехнической машиной 10 в зоне 21, соседней по отношению к зоне 20 штабелирования, управляющее устройство лесотехнической машины 10 автоматически распознает местоположение лесотехнической машины 10, предпочтительно, относительно штабеля и места зоны 20 штабелирования, и понимает, что лесотехническая машина 10 вернулась с новым грузом 22 лесоматериала. Кроме того, управляющее устройство лесотехнической машины 10 помнит ситуацию наполнения штабеля в зоне 20 штабелирования, автоматически помогает при выгрузке нового груза 22 лесоматериала аккуратно в штабель, и управляет пачками лесоматериала, взятыми из груза 22 лесоматериала в грузовом пространстве 11 лесотехнической машины 10 посредством манипулятора 16 по одной пачке в каждый отдельно взятый момент времени, укладывая их в ровный штабель в намеченной зоне 20 штабелирования. Кроме того, водитель может уведомить управляющее устройство о некоторой команде управления, касающейся заполнения штабеля, например, об отдельной команде или об определенном заранее оговоренном движении управления.
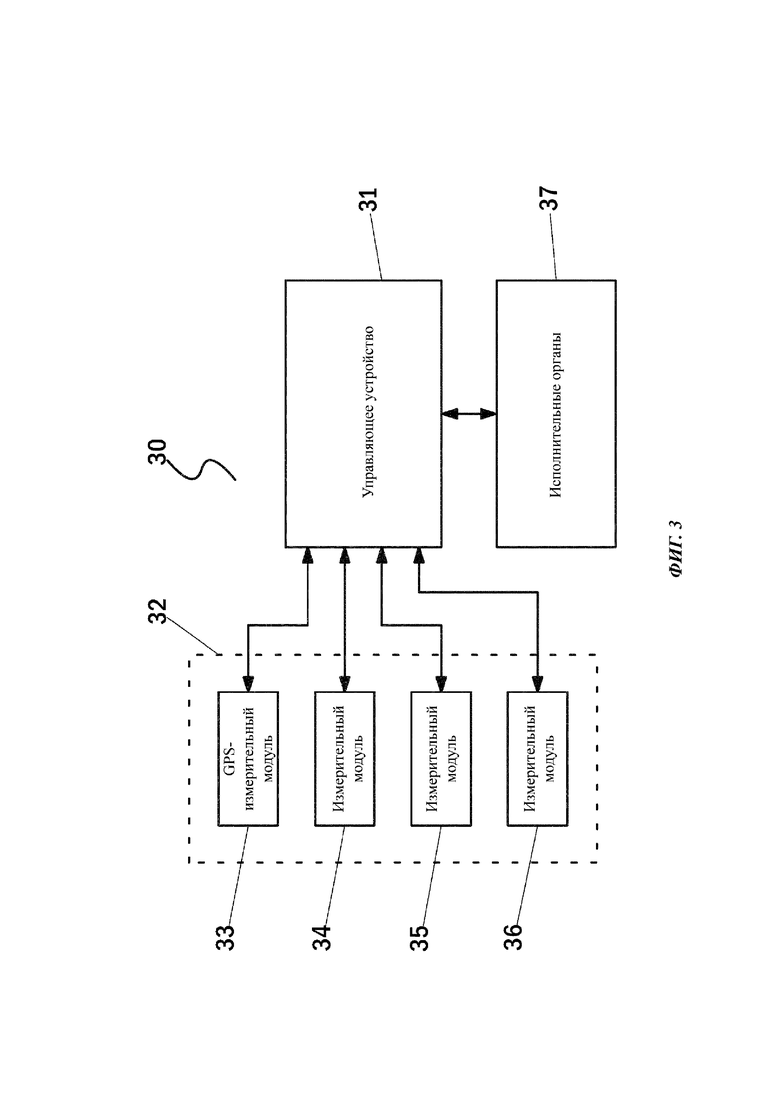
На фиг. 3 изображена блок-схема системы управления разгрузкой лесотехнической машины, соответствующей варианту осуществления изобретения. Система 30 управления разгрузкой лесотехнической машины, соответствующая варианту осуществления изобретения, содержит управляющее устройство 31, измерительное устройство 32 и исполнительные органы 37 лесотехнической машины. Измерительное устройство 32 системы 30 управления согласно изобретению содержит по меньшей мере два измерительных модуля 33-36, посредством которых можно измерять некоторые необходимые переменные, например, местоположение лесотехнической машины 10, предпочтительно относительно штабеля лесоматериала, положение манипулятора 16, предпочтительно относительно штабеля и лесотехнической машины 10, а также угол поворота манипулятора и местоположение и угол поворота пачки лесоматериала, взятой посредством манипулятора 16. Указанные по меньшей мере два измерительных модуля 33-36 измерительного устройства 32 могут содержать по меньшей мере один GPS-измерительный модуль для определения местоположения лесотехнической машины 10.
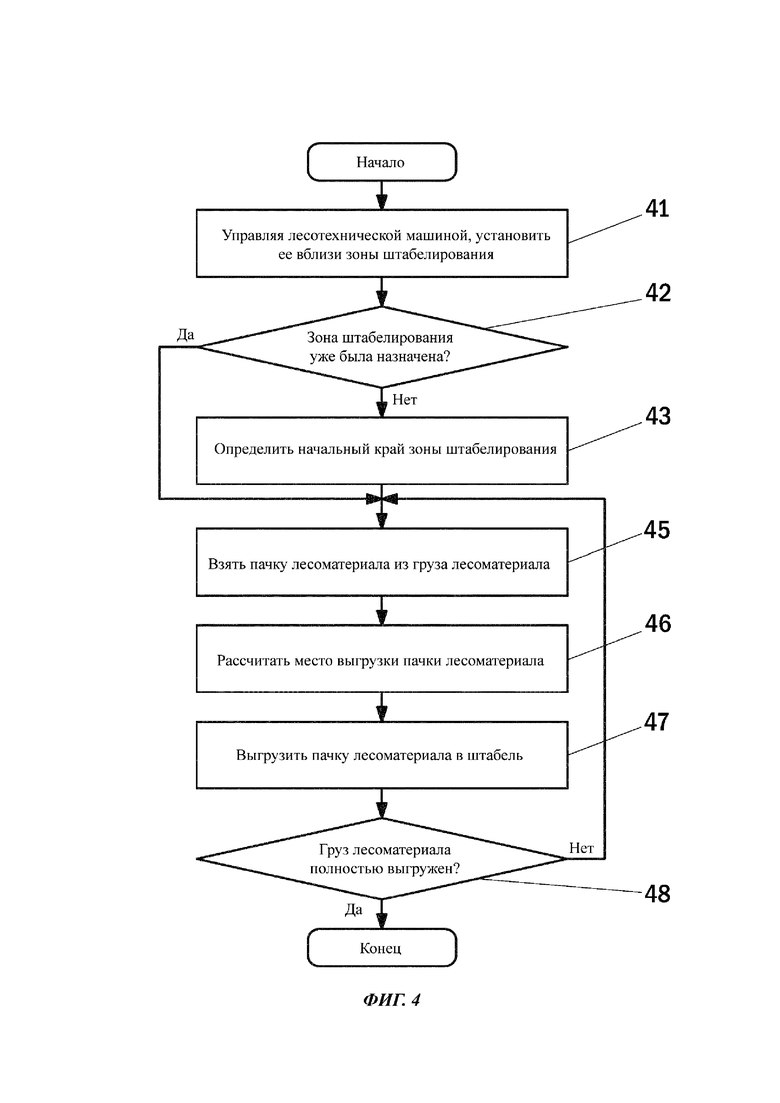
На фиг. 4 изображена блок-схема алгоритма реализации способа, соответствующего варианту осуществления изобретения, для управления разгрузкой лесотехнической машины. В соответствующем изобретению способе для разгрузки лесотехнической машины водитель сначала выбирает/определяет подходящую зону 20 штабелирования для штабеля, например зону 20 штабелирования на обочине дороги, и управляет лесотехнической машиной, устанавливая лесотехническую машину вблизи зоны штабелирования, которая была выбрана/определена (этап 41).
Затем на этапе 42 управляющее устройство 31 лесотехнической машины 10 проверяет то, было ли ранее назначена зона штабелирования. Если зона штабелирования ранее назначена не была, то зона штабелирования назначается на следующем этапе 43. В описываемом способе, соответствующем варианту осуществления изобретения, водитель лесотехнической машины 10 фиксирует зону 20 штабелирования посредством стрелы 12 лесотехнической машины 10 и манипулятора 16, присоединенного к стреле 12. Начальный край зоны штабелирования может быть назначен на этапе 43 путем захвата пачки 23 лесоматериала из груза 22 лесоматериала в грузовом пространстве 11 лесотехнической машины 10, а также переноса и выгрузки указанной пачки 23 лесоматериала на начальном крае зоны 20 штабелирования. После определения на этапе 43 положения штабеля можно перейти к этапам 45-48 выгрузки груза лесоматериала. Также, соответственно, если управляющее устройство 31 на этапе 42 устанавливает, что зона штабелирования уже было ранее назначена, то можно переходить к этапам 45-48 выгрузки груза лесоматериала.
Далее, на этапах 45-48 выгрузки груза лесоматериала лесотехническая машина 10 при помощи манипулятора 16 забирает (этап 45) пачку лесоматериала из груза 22 лесоматериала в грузовом пространстве 11. Когда манипулятор 16 возьмет пачку лесоматериала (этап 45), управляющее устройство лесотехнической машины 10 рассчитывает (этап 46) подходящее место выгрузки взятой пачки лесоматериала, и, управляя средствами выгрузки, будет переносить пачки лесоматериала (по одной пачке за раз) в рассчитанное (на этапе 46) подходящее место выгрузки, где пачка лесоматериала будет аккуратно выгружена (этап 47) в штабель лесоматериала. Когда груз лесоматериала (на этапе 48) будет полностью выгружен из лесотехнической машины в штабель зоны 20 штабелирования, выполнение этапов 45-48 прекращается, и лесотехническая машина 10 может уехать, чтобы взять новый груз лесоматериала в зоне валки леса.
На фиг. 5 представлен вид сверху, иллюстрирующий иную систему, соответствующую варианту осуществления настоящего изобретения, для управления выгрузкой лесоматериала из лесотехнической машины. В данном ином варианте водитель лесотехнической машины 10, например, форвардера, выбирает/определяет подходящую зону 20 штабелирования, и, управляя лесотехнической машиной 10, устанавливает последнюю в зоне 21, соседней с зоной 20 штабелирования. Водитель лесотехнической машины 10 назначает зону 20 штабелирования при помощи стрелы 12 лесотехнической машины 10 и манипулятора 16, присоединенного ка указанной стреле 12.
В системе, соответствующей иному варианту осуществления изобретения, отметить начальный край зоны 20 штабелирования можно, например, если взять первую пачку 23 лесоматериала из груза 22 лесоматериала в грузовом пространстве 11 лесотехнической машины 10, перенести (по стрелке А), и выгрузить первую пачку 23 лесоматериала на первом краю зоны 20 штабелирования, на левом краю на фиг. 5. Аналогично, отметить конечный край зоны 20 штабелирования можно, например, если взять пачку 24 лесоматериала из груза 22 лесоматериала в грузовом пространстве 11 лесотехнической машины 10, перенести (по стрелке В), и выгрузить указанную пачку 24 лесоматериала на противоположном втором краю зоны 20 штабелирования, на правом краю на фиг. 5.
Согласно системе, соответствующей варианту осуществления изобретения, управляющее устройство лесотехнической машины 10 затем считывает местоположение зоны 20 штабелирования, начиная с места выгрузки первой пачки 23 лесоматериала и заканчивая местом выгрузки второй пачки 24 лесоматериала. Управляющему устройству лесотехнической машины 10 может также быть понятно, что штабель можно наполнять равномерно между вышеупомянутыми местами выгрузки пачек 23, 24 лесоматериала.
Когда, согласно системе, соответствующей варианту осуществления изобретения, зона 20 штабелирования была намечена (назначена), управляющее устройство лесотехнической машины 10 автоматически помогает при управлении и выгрузке груза 22 лесоматериала. Управляющее устройство лесотехнической машины 10 рассчитывает подходящее место выгрузки для каждой пачки лесоматериала, взятой из груза 22 лесоматериала в грузовом пространстве 11 лесотехнической машины 10 посредством манипулятора 16, и управляет переносом указанных пачек лесоматериала по одной за раз в расчетное место выгрузки, аккуратно в штабель. Следовательно, в намеченной зоне 20 штабелирования может быть сложен ровный и/или прямой с одного края штабель. Когда груз 22 лесоматериала оказывается полностью выгруженным в штабель в зону 20 штабелирования, лесотехническая машина 10 может уехать, чтобы взять новый груз лесоматериала в зоне валки леса. Согласно системе, соответствующей варианту осуществления изобретения, лесотехническая машина 10 возвращается обратно с новым грузом лесоматериала, чтобы встать вблизи зоны 20 штабелирования у обочины дороги. Когда водитель, управляя лесотехнической машиной 10, устанавливает последнюю в зону 21, соседнюю с зоной 20 штабелирования, управляющее устройство лесотехнической машины 10 автоматически распознает местоположение лесотехнической машины 10, предпочтительно относительно штабеля и местоположения зоны 20 штабелирования, и понимает, что лесотехническая машина 10 вернулась с грузом нового 22 лесоматериала. Кроме того, управляющее устройство лесотехнической машины 10 помнит ситуацию наполнения штабеля в зоне 20 штабелирования, и автоматически помогает аккуратно выгружать в штабель новый груз 22 лесоматериала, при этом система поштучно управляет пачками лесоматериала, взятыми из груза 22 лесоматериала в грузовом пространстве 11 лесотехнической машины 10 посредством манипулятора 16, укладывая пачки в ровный штабель в зоне 20 штабелирования. Кроме того, водитель может уведомить управляющее устройство о некоторой команде управления, касающейся заполнения штабеля, например, об отдельной команде или об определенном заранее оговоренном движении управления.
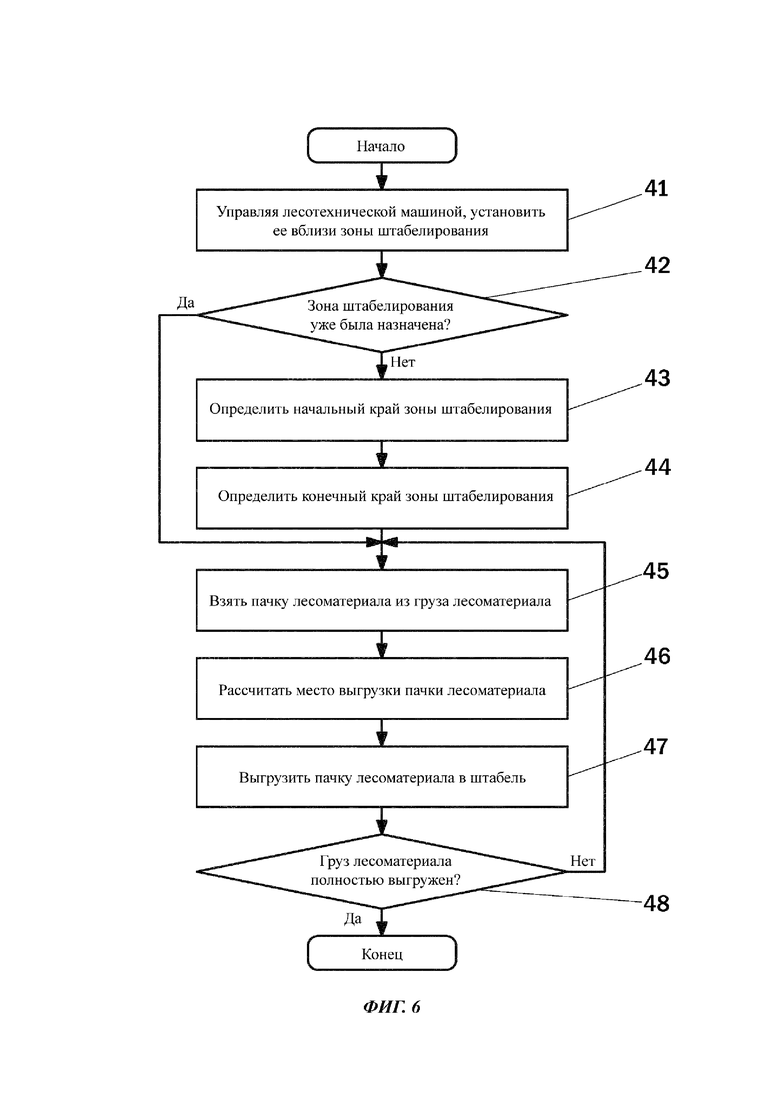
На фиг.6 изображена блок-схема алгоритма реализации способа, соответствующего иному варианту осуществления изобретения, для управления разгрузкой лесотехнической машины. В соответствующем изобретению способе для разгрузки лесотехнической машины водитель сначала выбирает/определяет подходящую зону 20 штабелирования для штабеля лесоматериала, например зону 20 штабелирования на обочине дороги, и управляет лесотехнической машиной, устанавливая лесотехническую машину вблизи зоны штабелирования, которая было выбрано/определено (этап 41). Затем на этапе 42 управляющее устройство 31 лесотехнической машины 10 проверяет было ли ранее назначена зона штабелирования. Если зона штабелирования ранее назначена не была, то зона штабелирования назначается на следующих этапах 43, 44. В описываемом способе, соответствующем варианту осуществления изобретения, водитель лесотехнической машины 10 фиксирует (этапы 43, 44) зону 20 штабелирования посредством стрелы 12 лесотехнической машины 10 и манипулятора 16, присоединенного к стреле 12.
Начальный край зоны штабелирования может быть назначен на этапе 43 путем захвата первой пачки 23 лесоматериала из груза 22 лесоматериала в грузовом пространстве 11 лесотехнической машины 10, а также переноса и выгрузки указанной пачки 23 лесоматериала на начальном крае зоны 20 штабелирования. Аналогично, конечный край зоны штабелирования может быть назначен на этапе 44 путем захвата второй пачки 24 лесоматериала из груза 22 лесоматериала в грузовом пространстве 11 лесотехнической машины 10, а также переноса и выгрузки указанной пачки 24 лесоматериала на конечном крае зоны 20 штабелирования. После того, как будет назначено (этапы 43, 44) местоположение зоны штабелирования, можно переходить к этапам 45-48 выгрузки лесоматериала. Также, соответственно, если управляющее устройство 31 на этапе 42 устанавливает, что зона штабелирования уже была ранее назначена, то можно переходить к этапам 45-48 выгрузки лесоматериала.
Далее, на этапах 45-48 выгрузки лесоматериала лесотехническая машина 10 при помощи манипулятора 16 забирает (этап 45) пачку лесоматериала из груза 22 лесоматериала в грузовом пространстве 11. Когда манипулятор 16 захватит пачку лесоматериала (этап 45), управляющее устройство 31 лесотехнической машины 10 рассчитает (этап 46) подходящее место выгрузки захваченной пачки лесоматериала, и, управляя средствами выгрузки, будет переносить пачки лесоматериала (по одной пачке за раз) в рассчитанное (на этапе 46) подходящее место выгрузки, где пачка лесоматериала будет аккуратно выгружена (этап 47) в штабель лесоматериала. Когда груз лесоматериала (на этапе 48) будет полностью выгружен из лесотехнической машины в штабель в зоне 20 штабелирования, выполнение этапов 45-48 прекращается, и лесотехническая машина 10 может уехать, чтобы взять новый груз лесоматериала в зоне валки леса.
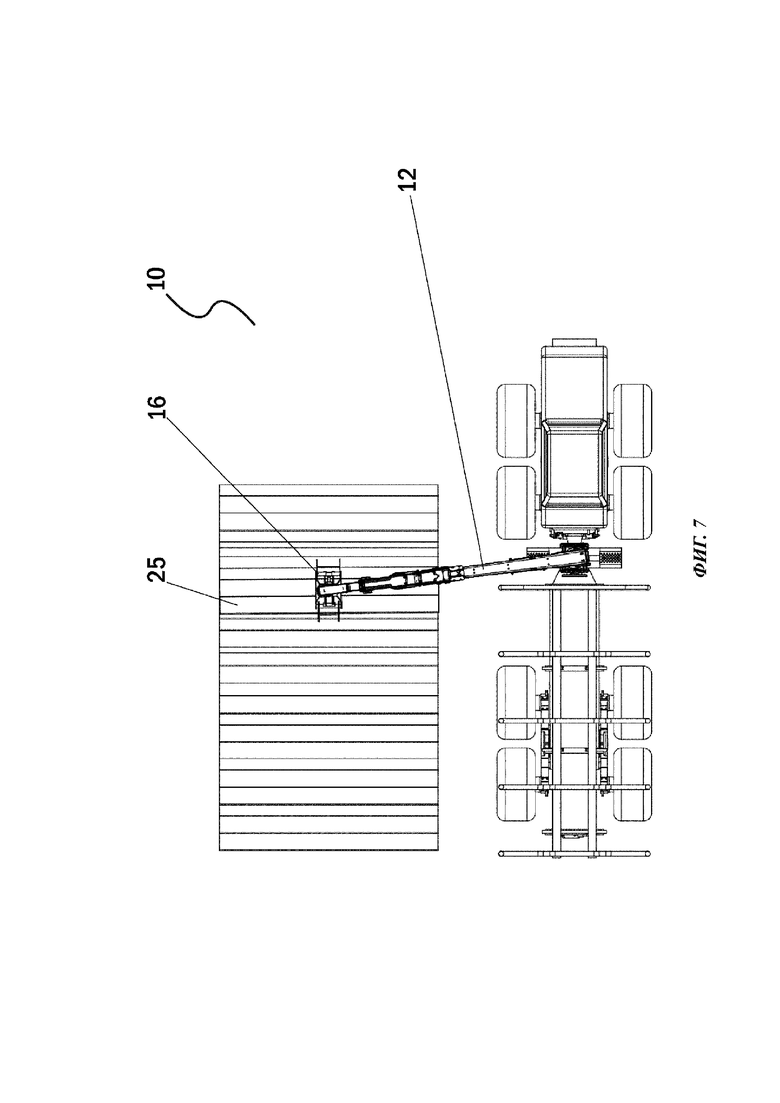
На фиг. 7 представлен вид сверху, иллюстрирующий ситуацию разгрузки лесотехнической машины, соответствующую варианту осуществления изобретения. В ситуации разгрузки лесотехнической машины, соответствующей варианту осуществления изобретения, лесотехническая машина 10 укладывает пачку 25 лесоматериала на место посредством стрелы 12 и манипулятора 16.
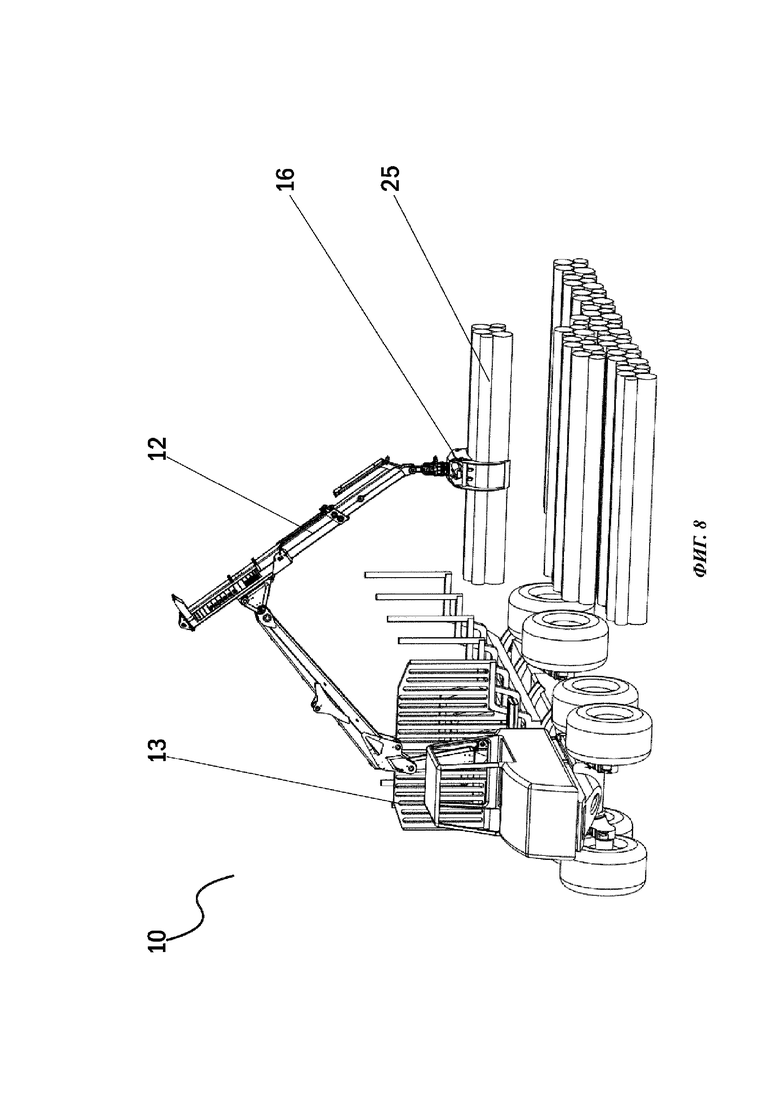
Фиг. 8 в аксонометрии изображает ситуацию разгрузки лесотехнической машины, соответствующую варианту осуществления изобретения. В ситуации разгрузки лесотехнической машины, соответствующей варианту осуществления изобретения, лесотехническая машина 10 укладывает пачку 25 лесоматериала на место посредством стрелы 12 и манипулятора 16. На фиг. 8 защитная перегородка обозначена позицией 13.
На фиг. 9 представлен первый вид сверху, иллюстрирующий ход процесса разгрузки лесотехнической машины, соответствующий варианту осуществления изобретения. В ситуации разгрузки лесотехнической машины, соответствующей варианту осуществления изобретения, лесотехническая машина 10 укладывает пачку 25 лесоматериала на место посредством стрелы 12 и манипулятора 16. На этапе разгрузки, изображенном на фиг. 9, в грузовом пространстве лесотехнической машины еще остается груз лесоматериала.
На фиг. 10 представлен второй вид сверху, иллюстрирующий ход процесса разгрузки лесотехнической машины, соответствующий варианту осуществления изобретения. В ситуации разгрузки лесотехнической машины, соответствующей варианту осуществления изобретения, лесотехническая машина 10 укладывает последнюю пачку 25 лесоматериала на место посредством стрелы 12 и манипулятора 16. На этапе разгрузки, изображенном на фиг. 10, груза лесоматериала на лесотехнической машине 10 не осталось, и грузовое пространство лесотехнической машины свободно. На фиг. 10 управляющее устройство лесотехнической машины еще не управляет манипулятором, чтобы развернуть пачку 25 лесоматериала в зоне штабелирования правильным образом.
На фиг. 11 представлен третий вид сверху, иллюстрирующий ход процесса разгрузки лесотехнической машины, соответствующий варианту осуществления изобретения. В ситуации разгрузки лесотехнической машины, соответствующей варианту осуществления изобретения, лесотехническая машина 10 готова выгрузить последнюю пачку 25 лесоматериала на место посредством стрелы 12 и манипулятора 16. На этапе разгрузки, изображенном на фиг. 11, груза лесоматериала на лесотехнической машине 10 не осталось, и грузовое пространство лесотехнической машины свободно. На фиг. 11 управляющее устройство лесотехнической машины уже управляет манипулятором, чтобы развернуть пачку 25 лесоматериала правильным образом, и таким образом выгрузить пачку 25 лесоматериала в надлежащее место в штабеле.
Устройство управления выгрузкой груза лесоматериала согласно системе, соответствующей изобретению, значительно облегчает выгрузку груза лесоматериала. Управляющее устройство лесотехнической машины, согласно системе, соответствующей изобретению, автоматически помогает в управлении и разгрузке лесоматериала в намеченную зону штабелирования. В соответствующей изобретению системе управляющее устройство лесотехнической машины помогает водителю захватывать пачки лесоматериала всегда на точно определенном расстоянии от лесотехнической машины, при этом край штабеля становится ровным независимо от положения, в котором манипулятор захватывает пачку лесоматериала в направлении их длины.
Специалистам в данной области должно быть очевидно, что по мере развития технологии основная идея изобретения может быть реализована множеством различных способов. Таким образом, изобретение и варианты его осуществления не ограничиваются вышеприведенными примерами, но могут изменяться в рамках объема изобретения, обозначенного формулой изобретения.
Группа изобретений относится к лесотехническим машинам. Система для управления разгрузкой лесотехнической машины, содержащей грузовое пространство для лесоматериала, стрелу и манипулятор, содержит управляющее устройство и измерительное устройство. Измерительное устройство выполнено с возможностью измерения местоположения лесотехнической машины, угла поворота стрелы, положения отдельных частей стрелы и положения манипулятора. Управляющее устройство выполнено с возможностью определения и фиксации зоны штабелирования, расчета и фиксации положения края штабеля лесоматериала, управления манипулятором для захвата пачки лесоматериала, обеспечения возможности водителю и/или управляющему устройству выравнивать пачку лесоматериала по защитной перегородке, вычисления расстояния торца выровненной по защитной перегородке пачки лесоматериала относительно манипулятора, расчета места выгрузки для указанной пачки лесоматериала в зоне штабелирования, определенной для штабеля лесоматериала, и управления выгрузкой и выгрузки пачки лесоматериала в расчетном месте выгрузки в штабель лесоматериала посредством управляющего устройства и измерительного устройства лесотехнической машины, так чтобы один край штабеля лесоматериала получался ровным и прямым. Улучшается управляемость, сокращается время и повышается надежность разгрузки лесоматериалов в штабели. 2 н. и 13 з.п. ф-лы, 11 ил.
1. Система (30) для управления разгрузкой лесотехнической машины (10), содержащей грузовое пространство (11) для груза (22) лесоматериала, стрелу (12) и манипулятор (16), присоединенный к указанной стреле, причем система (30) дополнительно содержит управляющее устройство (31) и измерительное устройство (32) лесотехнической машины (10), причем: указанное измерительное устройство (32) выполнено с возможностью измерения местоположения лесотехнической машины (10), угла поворота стрелы (12), положения отдельных частей стрелы (12), и положения манипулятора (16), при этом указанное управляющее устройство (31) выполнено с возможностью: определения и фиксации зоны (20) штабелирования, расчета и фиксации положения края штабеля лесоматериала, управления манипулятором (16) для захвата пачки лесоматериала из груза (22) лесоматериала, обеспечения возможности водителю и/или управляющему устройству выравнивать пачку (23) лесоматериала по защитной перегородке (13), вычисления расстояния торца выровненной по защитной перегородке (13) пачки лесоматериала относительно манипулятора (16), расчета места выгрузки для указанной пачки лесоматериала в зоне (20) штабелирования, определенной для штабеля лесоматериала, и управления выгрузкой и выгрузки указанной пачки лесоматериала в указанном расчетном месте выгрузки в штабель лесоматериала посредством указанного управляющего устройства (31) и указанного измерительного устройства (32) лесотехнической машины (10), так чтобы один край штабеля лесоматериала получался ровным и прямым.
2. Система (30) по п. 1, в которой указанное измерительное устройство (32) выполнено с возможностью измерения пространства перемещения отдельных частей стрелы (12).
3. Система (30) по п. 1 или 2, в которой указанное измерительное устройство (32) выполнено с возможностью измерения угла поворота манипулятора (16).
4. Система (30) по любому из предшествующих пунктов, в которой указанное управляющее устройство (31) выполнено с возможностью управления углом поворота указанной стрелы (12), положением отдельных частей стрелы (12) и положением указанного манипулятора (16).
5. Система (30) по любому из предшествующих пунктов, в которой указанное измерительное устройство (32) выполнено с возможностью измерения положения средств захвата манипулятора (16).
6. Система (30) по п. 5, в которой указанное измерительное устройство (31) выполнено с возможностью распознавания положения и/или управления положением средств захвата манипулятора (16).
7. Система (30) по любому из предшествующих пунктов, в которой указанное управляющее устройство (31) выполнено с возможностью вычисления высоты штабеля лесоматериала на основании местоположения выгрузки выгружаемых пачек лесоматериала.
8. Система (30) по любому из предшествующих пунктов, в которой указанное управляющее устройство (31) выполнено с возможностью автоматического определения местоположения лесотехнической машины (10) и/или зоны (20) штабелирования.
9. Система (30) по любому из предшествующих пунктов, в которой указанное управляющее устройство (31) выполнено с возможностью автоматического определения положения стрелы (12) лесотехнической машины (10) и/или угла поворота стрелы путем определения положения и/или пространства перемещения отдельных частей стрелы.
10. Система (30) по любому из предшествующих пунктов, в которой указанная лесотехническая машина (10) представляет собой форвардер.
11. Способ управления разгрузкой лесотехнической машины (10), содержащей грузовое пространство (11) для груза (22) лесоматериала, стрелу (12) и манипулятор (16), присоединенный к указанной стреле, управляющее устройство (31) и измерительное устройство (32), причем указанный способ содержит этапы: определения и фиксации (43) (44) зоны (20) штабелирования, расчета и фиксации положения края штабеля лесоматериала, захвата (45) посредством манипулятора (16) пачки лесоматериала из груза (22) лесоматериала, предоставления возможности водителю и/или управляющему устройству выравнивать пачку (23) лесоматериала по защитной перегородке (13), вычисления (46) расстояния торца выровненной по защитной перегородке (13) пачки лесоматериала относительно манипулятора (16), расчета места выгрузки указанной пачки лесоматериала в зоне (20) штабелирования, определенной для штабеля лесоматериала, и управления выгрузкой и выгрузки (47) указанной пачки лесоматериала в указанном расчетном месте выгрузки в штабель лесоматериала посредством указанного управляющего устройства (31) и указанного измерительного устройства (32) лесотехнической машины (10), так чтобы один край штабеля лесоматериала получался ровным и прямым.
12. Способ по п. 11, в котором зону (20) штабелирования определяют и фиксируют (43) (44) путем захвата пачки (23) лесоматериала из груза (22) лесоматериала в указанном грузовом пространстве (11), переноса и выгрузки указанной пачки (23) лесоматериала на первом краю зоны (20) штабелирования.
13. Способ по п. 11, в котором зону (20) штабелирования определяют и фиксируют (43) (44) путем захвата первой пачки (23) лесоматериала из груза (22) лесоматериала в указанном грузовом пространстве (11), переноса и выгрузки указанной пачки (23) лесоматериала на первом краю зоны (20) штабелирования, и путем захвата второй пачки (24) лесоматериала из груза (22) лесоматериала в указанном грузовом пространстве (11), переноса и выгрузки указанной второй пачки (24) лесоматериала на втором краю зоны (20) штабелирования.
14. Способ по любому из пп. 11-13, содержащий этап управления манипулятором (16) относительно защитной перегородки (13) и регистрации местоположения указанной защитной перегородки (13).
15. Способ по любому из пп. 11-14, в котором указанная лесотехническая машина (10) представляет собой форвардер.
| Lofgren B., Kinematic Control of Redundant Knuckle Booms with Automatic Path-Following Functions, KTH Industrial Engineering and Management, Stockholm, 09.11.2009 | |||
| Shiriaev A | |||
| et al., Status of Smart Crane Lab Project: Modeling and Control for a Forwarder Crane, Umea University, Umea, 18.06.2008 | |||
| US 20170089032 A1, 30.03.2017 | |||
| WO 2018130747 A1, |
