Изобретение относится к подводной технике в частности к технологиям создания средств навигации и управления для глубоководных автономных необитаемых подводных аппаратов (АНПА), способных работать на предельных глубинах Мирового океана.
Известен способ определения горизонтальных координат неподвижного подводного источника навигационных сигналов [патент RU №2378663, МПК: G01S 15/06, опубликован 10.01.2010 г.].
Способ применяется для определения местоположения или для точной координатной привязки точек постановки стационарных маяков гидроакустических навигационных систем, стартовых точек или точек зависания автономных подводных роботов и других подводных технических средств, оснащенных источниками навигационных сигналов. Способ заключается в том, что в окрестности места постановки источника гидроакустических навигационных сигналов буксируют гидроакустическую приемную антенну. Измеряют время распространения гидроакустических навигационных сигналов в точках нахождения приемной антенны. Фиксируют текущие координаты буксируемой антенны в момент приема навигационных сигналов. Полученную информацию записывают и по ней вычисляют координаты неподвижного подводного источника. При этом буксируемую гидроакустическую приемную антенну перемещают произвольными галсами, охватывающими с различных направлений окрестность места постановки неподвижного подводного источника гидроакустических навигационных сигналов. Зафиксированные координаты приемной антенны, полученные на произвольных галсах, формируют в группы, равноудаленные от неподвижного подводного источника навигационных сигналов в соответствиис измеренными временами распространения навигационных сигналов. Затем для каждой группы равноудаленных координатных отсчетов, если их число не менее трех, оценивают горизонтальные координаты источника в выбранной системе координат.
Недостатком указанного способа является то, что он с низкой точностью обеспечивает обсервацию подвижного объекта, работающего у донной поверхности на предельной глубине. Подвижное техническое средство необходимо удерживать значительное время в заданной точке с помощью движительно-рулевого комплекса. Это обуславливает значительные затраты энергии аккумуляторных батарей, особенно при работе в районах с сильным течением. В связи с этим значительно снижается время автономной работы подвижных технических средств и, как следствие, их поисковая производительность (площадь, осматриваемая техническим зрением АНПА за время решения поисковой задачи).
Известен Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата [патент RU №2689281, МПК: G01S 3/808, опубликован 24.05.2019].
В способе навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата стационарный донный маяк оснащают низкочастотными (НЧ) приемо-передающими средствами гидроакустической связи с обеспечивающим судном (ОС) и АНПА, а также высокочастотными (ВЧ) приемо-передающими средствами гидроакустической связи с АНПА. Оснащают АНПА ВЧ приемопередающими средствами гидроакустической связи и НЧ приемными средствами гидроакустической связи, а также оснащают программными средствами для его бортовой системы управления, реализующими выход АНПА к стационарному донному маяку на основании приема и обработки данных, принятых от стационарного донного маяка по гидроакустической связи в НЧ диапазоне. После чего стационарный донный маяк размещают вблизи центра предполагаемого района работ. Устанавливают координатыстартовой точки АНПА путем их расчета по дальномерным данным стационарного донного маяка на основании приема и обработки данных, принятых от него в ВЧ-диапазоне гидроакустической связи. Обеспечивают прием команд управления на борту АНПА от ОС путем приема и обработки данных, переданных от ОС в НЧ-диапазоне и ретранслированных стационарным донным маяком в ВЧ-диапазоне гидроакустической связи. Обеспечивают передачу данных телеметрии с борта АНПА путем приема и обработки данных, принятых стационарным донным маяком в ВЧ-диапазоне и ретранслированных на ОС в НЧ-диапазоне гидроакустической связи Значения рабочих частот гидроакустических средств информационного обмена в НЧ-диапазоне выбирают из условия максимального удаления ОС от стационарного донного маяка, а значения рабочих частот гидроакустических средств информационного обмена в ВЧ-диапазоне выбирают из условия заданного максимального удаления АНПА от стационарного донного маяка и необходимой скорости передачи данных. Данное изобретение принято за прототип.
Недостатком известного способа является то, что навигационная привязка осуществляется с помощью необходимости подхода АНПА в зону расположения стационарного донного гидроакустического маяка, координаты которого заносятся в систему управления АНПА. Определение курса и расстояния до стационарного донного гидроакустического маяка осуществляется АНПА с помощью серии последовательных измерений дальности по гидроакустическому каналу, выполняемых в разных точках, не лежащих на одном галсе, при нахождении АНПА в режиме удержания позиции. Данный способ накладывает ограничения на выполняемые миссии АНПА в связи с необходимостью отклонения от заданной траектории движения с целью выполнения обсервации, что также снижает поисковую производительность АНПА. Поисковая производительность снижается в связи со значительными затратами запаса энергии аккумуляторной батареи на выполнение удержания АНПА стационарно в точке при обсервации, особеннов условиях воздействия течения, а также на дополнительные переходы в зону установки стационарного донного гидроакустического маяка. Как следствие, значительно сокращается время на решение поисковых задач АНПА.
Техническая проблема, решаемая в настоящем изобретении: повышение поисковой производительности АНПА, точности обсервации АНПА, при отсутствии затрат запаса энергии аккумуляторной батареи на выполнение удержания АНПА стационарно в точке при обсервации, особенно в условиях воздействия течения, а также на дополнительные переходы в зону установки стационарного донного гидроакустического маяка, и, как следствие, увеличение времени на решение поисковых и обследовательских задач АНПА.
Поставленная задача достигается тем, что в районе, где планируется работа АНПА, на дне устанавливают на расстоянии до 20 км (расстояние определяется дальностью стабильной гидроакустической связи в заданных гидрофизических условиях) друг от друга в форме треугольника три стационарных донных гидроакустических маяка (ДМ). Возможна установка и большего числа ДМ. Определяют одновременно их географические координаты за счет установленных на ДМ и ОС широкополосных НЧ приемопередающих средств гидроакустической связи (диапазон рабочих частот 8-16 кГц) с помощью навигационной гидроакустической антенны, выставленной с борта ОС. Для этого выполняют передачу на ДМ сигналов и прием ответных сигналов пунктом управления, размещенного на борту ОС.
Для увеличения поисковой производительности возможно использование двух и более АНПА, которые движутся по параллельным траекториям с первым (движение АНПА по параллельным траекториям позволяет обеспечить формирование набора результатов поиска при постобработке данных работы системы технического зрения АНПА), что также приводит к повышению поисковой производительности.
Каждый АНПА оснащают модулем широкополосных НЧ приемопередающих средств гидроакустической связи.
Кроме того, первый АНПА дополнительно оснащают модулем гидроакустической связи средней частоты, а АНПА кроме первого, если используется несколько АНПА, оснащают дополнительно модулями гидроакустической связи с ультракороткой базой средней частоты.
Осуществляют погружение АНПА.
После погружения первого (или единственного, если используется для поисковой задачи только один АНПА) АНПА на заданную глубину выполняется его обсервация на основании излучения АНПА широкополосного НЧ гидроакустического сигнала на частотах, соответствующих частотам работы средств гидроакустической связи на каждом из ДМ, дальнейшего приема ответных сигналов от каждого из ДМ и последующего расчета координат АНПА на вычислительных мощностях бортовой системы управления АНПА с помощью реализации математического метода [«Практическое кораблевождение» Министерство обороны СССР ГУНиО №9035.1 под редакцией А.П. Михайловского, 1989 год, стр. 305-311, стр. 369-373], без выхода АНПА в точку расположения любого из ДМ, за счет чего и достигается повышение точности обсервации и снижение затрат энергии аккумуляторных батарей по сравнению со способом, описанным в изобретении, патент №2378663.
В случае использования более одного АНПА выполняется обсервация каждого АНПА с помощью ДМ после погружения АНПА к донной поверхности. Затем АНПА осуществляют движение по параллельным траекториям, а первый АНПА осуществляет периодическую обсервацию с помощью ДМ. При этом первый АНПА осуществляет периодическое излучение гидроакустических сигналов с помощью модуля гидроакустической связи средней частоты. Остальные АНПА, кроме первого осуществляют периодическую корректировку траектории движения относительно первого АНПА с помощью модуля гидроакустической связи с ультракороткой базой средней частоты (см., например, ["Автономные подводные роботы. Системы и технологии" // Под ред. М.Д. Агеева, Москва, Наука 2005 г., стр. 125-176.]), что позволяет значительно экономить запас электроэнергии аккумуляторных батарей дополнительных АНПА за счет реализации процесса обсервации только для первого АНПА.
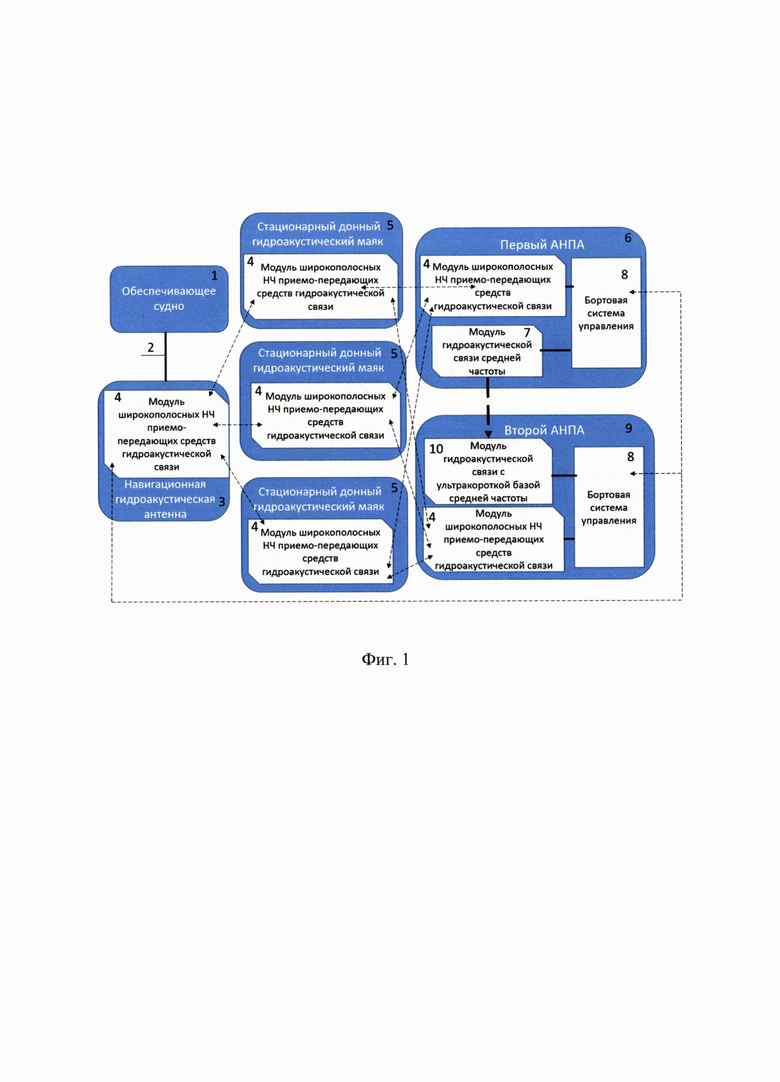
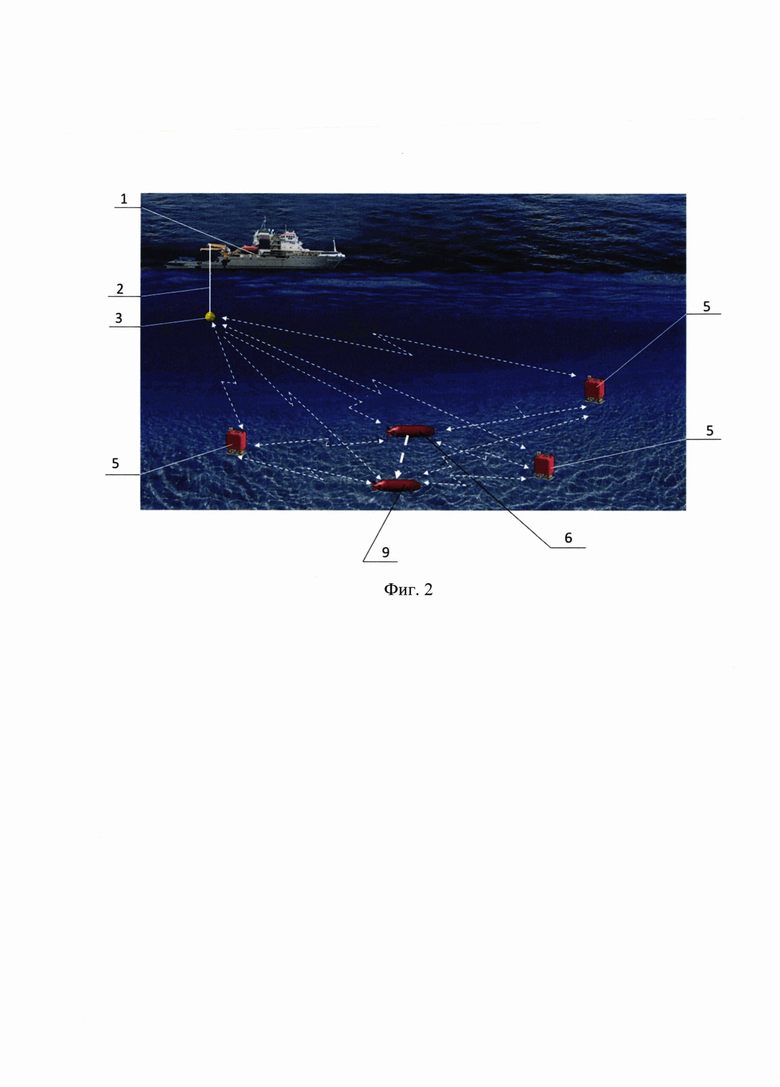
Сущность изобретения поясняется чертежами фиг. 1 и фиг. 2, где на фиг. 1 показана структурная схема устанавливаемого оборудования, на фиг. 2 - схема расположения технических средств.
Для осуществления способа используют обеспечивающее судно 1, с которого выставлена на грузонесущем кабеле 2 навигационная гидроакустическая антенна 3, оснащенная модулем широкополосных НЧ приемо-передающих средств гидроакустической связи 4, стационарные донные гидроакустические маяки 5, оснащенные модулями широкополосных НЧ приемо-передающих средств гидроакустической связи 4, первый АНПА 6, оснащенный модулем широкополосных НЧ приемо-передающих средств гидроакустической связи 4, а также модулем гидроакустической связи средней частоты 7 и бортовой системой управления АНПА 8, второй (и последующие единицы АНПА, если они используются для решения поставленной поисковой задачи, на фиг. 2 не показаны) АНПА 9, оснащенный модулем широкополосных НЧ приемо-передающих средств гидроакустической связи 4, а также модулем гидроакустической связи с ультракороткой базой средней частоты 10, и бортовой системой управления 8.
Способ реализуется следующим образом. В районе работ устанавливают на дне, на расстоянии до 20 км друг от друга в форме треугольника не менее трех ДМ 5. После их постановки на донную поверхность осуществляется координирование ДМ 5. При этом обеспечивающее судно 1 в районе постановки ДМ 5 выполняет буксировку навигационной гидроакустической антенны 3. Процесс координирования осуществляется на основании измерения дальности до каждого из стационарных донных гидроакустических маяков 5 в запросно-ответном режиме с помощью отправки широкополосных гидроакустических сигналов от навигационной гидроакустической антенны 3, выставленной с обеспечивающего судна 1 на грузонесущем кабеле 2. КаждыйДМ 5 формирует ответный гидроакустический сигнал на заданной заранее для каждого ДМ частоте, после чего на борту обеспечивающего судна 1 осуществляется определение координат стационарных ДМ 5. При этом осуществляется определение местоположения одновременно трех стационарных ДМ 5 без необходимости координирования каждого из них в отдельности. Для решения поисковых задач около донной поверхности на предельных глубинах можно применять два или более глубоководных АНПА 6, 9. После спуска глубоководных АНПА 6, 9 осуществляется обсервация АНПА 6, 9. Обсервация каждого глубоководного АНПА 6, 9 осуществляется с помощью отправки глубоководными АНПА 6, 9 широкополосных гидроакустических сигналов одновременно всем стационарным ДМ 5 и последующего приема ответного сигнала от каждого стационарного донного гидроакустического маяка 5 на заданной заранее для каждого ДМ частоте, после чего осуществляется обсервация каждого глубоководного АНПА без необходимости выхода глубоководных АНПА 6, 9 в точку расположения любого ДМ 5. После обсервации АНПА 6, 9, глубоководные АНПА 6, 9 начинают движение по заданному маршруту. Глубоководные АНПА 6, 9 движутся по параллельным траекториям, с целью обеспечения максимальной поисковой производительности. Периодически глубоководный АНПА 6, осуществляет обсервацию по вышеупомянутому математическому методу. При этом с целью поддержания синхронного движения АНПА (требуется для формирования общего набора результатов решения поставленной поисковой задачи при постобработке данных работы системы технического зрения АНПА, если для решения поставленной поисковой задачи применяется два или более АНПА), первый глубоководный АНПА 6 периодически осуществляет излучение гидроакустических сигналов с помощью модуля гидроакустической связи средней частоты 7, а остальные глубоководные АНПА корректируют курс и скорость на основании данных, полученных с помощью модуля гидроакустической связи с ультракороткой базой средней частоты 10. Таким образом обеспечивается синхронное движение попараллельным траекториям глубоководных АНПА 6, 9, снижаются затраты запаса энергии аккумуляторных батарей АНПА за счет устранения затрат на движение в процессе обсервации АНПА и реализации процесса обсервации только для первого АНПА группы, и, как следствие, повышается поисковая производительность АНПА.
С помощью реализации предлагаемого способа будет достигнуто повышение точности обсервации и поисковой производительности, снижены затраты запаса энергии аккумуляторной батареи на выполнение удержания АНПА стационарно в точке при обсервации, особенно в условиях воздействия течения, а также на дополнительные переходы в зону установки стационарного донного гидроакустического маяка, увеличено время на решение поисковых и обследовательских задач АНПА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата большой автономности, совершающего протяженный подводный переход | 2018 |
|
RU2687844C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ навигационно-информационной поддержки автономного необитаемого подводного аппарата, выполняющего мониторинг подводного добычного комплекса | 2021 |
|
RU2756668C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2431156C1 |
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2709058C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Способ навигационной поддержки группы специализированных подводных аппаратов, выполняющих общую миссию в мелководной акватории | 2023 |
|
RU2819199C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
Изобретение относится к технике, к технологиям создания средств навигации и управления для глубоководных необитаемых подводных аппаратов (АНПА). На дне устанавливают на расстоянии друг от друга в форме треугольника три стационарных донных гидроакустических маяка (ДМ). Определяют одновременно их географические координаты за счет установленных на ДМ и обеспечивающем судне (ОС) широкополосных НЧ приемопередающих средств гидроакустической связи с помощью навигационной гидроакустической антенны. Выполняют передачу на ДМ сигналов и прием ответных сигналов пунктом управления, размещенным на борту ОС. Используют два и более АНПА, которые движутся по параллельным траекториям с первым, каждый АНПА оснащают модулем широкополосных НЧ приемопередающих средств гидроакустической связи. Первый АНПА дополнительно оснащают модулем гидроакустической связи средней частоты, АНПА, кроме первого, оснащают дополнительно модулями гидроакустической связи с ультракороткой базой средней частоты. Выполняется обсервация каждого АНПА с помощью ДМ после погружения АНПА. АНПА осуществляют движение по параллельным траекториям, первый АНПА осуществляет периодическую обсервацию с помощью ДМ. Технический результат - повышение производительности АНПА, точности обсервации АНПА. 2 ил.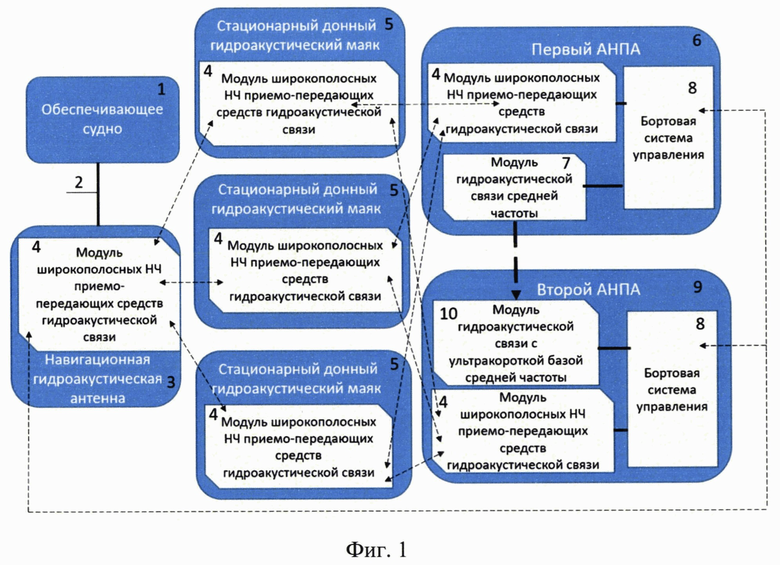
Способ навигационной поддержки глубоководного автономного необитаемого подводного аппарата - АНПА, заключающийся в том, что на дне устанавливают на расстоянии друг от друга в форме треугольника в районе, где планируется работа АНПА, три стационарных донных гидроакустических маяка, определяют одновременно их географические координаты за счет установленных на донных гидроакустических маяках и обеспечивающем судне широкополосных НЧ приемопередающих средств гидроакустической связи с помощью навигационной гидроакустической антенны, выставленной с борта обеспечивающего судна, для чего выполняют передачу на донные гидроакустические маяки сигналов и прием ответных сигналов пунктом управления, размещенным на борту обеспечивающего судна, кроме того, АНПА оснащают модулем гидроакустической связи средней частоты, осуществляют погружение АНПА на заданную глубину, выполняют обсервацию на основании излучения АНПА широкополосного НЧ гидроакустического сигнала на частотах, соответствующих частотам работы средств гидроакустической связи на каждом из донных гидроакустических маяков, дальнейшего приема ответных сигналов от каждого из донных гидроакустических маяков и последующего расчета координат АНПА на вычислительных мощностях бортовой системы управления АНПА, отличающийся тем, что используют два и более АНПА, при этом АНПА, кроме первого, оснащают модулями гидроакустической связи с ультракороткой базой средней частоты, осуществляют погружение АНПА, выполняют обсервацию на основании излучения АНПА широкополосного НЧ гидроакустического сигнала на частотах, соответствующих частотам работы средств гидроакустической связина каждом из донных гидроакустических маяков, дальнейшего приема ответных сигналов от каждого из донных гидроакустических маяков и последующего расчета координат АНПА на вычислительных мощностях бортовой системы управления АНПА, осуществляют движение АНПА по параллельным траекториям, при этом первый АНПА осуществляет периодическую обсервацию с помощью донных гидроакустических маяков, кроме того, первый АНПА осуществляет периодическое излучение гидроакустических сигналов с помощью модуля гидроакустической связи средней частоты, а остальные АНПА, кроме первого, осуществляют периодическую корректировку траектории движения относительно первого АНПА с помощью модуля гидроакустической связи с ультракороткой базой средней частоты, что и позволяет значительно экономить запас электроэнергии аккумуляторных батарей дополнительных АНПА за счет реализации процесса обсервации только для первого АНПА.
| Способ навигационно-информационной поддержки глубоководного автономного необитаемого подводного аппарата | 2018 |
|
RU2689281C1 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГОРИЗОНТАЛЬНЫХ КООРДИНАТ НЕПОДВИЖНОГО ПОДВОДНОГО ИСТОЧНИКА ГИДРОАКУСТИЧЕСКИХ НАВИГАЦИОННЫХ СИГНАЛОВ | 2008 |
|
RU2378663C1 |
| US 4173008 A1, 30.10.1979 | |||
| WO 2001065274 A1, 07.09.2001. | |||

