Изобретение относится к гидроакустике, в частности к гидроакустическим навигационным системам, работающим при наличии отражающих границ раздела, а более конкретно к определению координат преимущественно подводных подвижных аппаратов (ПМО).
Известны гидроакустические навигационные системы [1, 2], работающие при наличии окружающих границ раздела, основанные на способах, которые включают формирование на морском дне навигационной базы из гидроакустических приемоответчиков (ориентиров), размещение на подводном объекте навигации гидроакустического приемопередатчика, измерение времени распространения гидроакустических сигналов до ориентиров и обратно, определение расстояний между подводным объектом и ориентирами, определение координат подводного объекта по измеренным сигналам, путем формирования массивов полученных измерений (расстояний и/или пеленгов), нанесение на навигационную карту линии положений ориентиров относительно подводного объекта в соответствии с измеренными расстояниями и/или пеленгами, по которым определяют место (координаты) подводного объекта как точку пересечения линий положения на навигационной карте, при этом при непересечении линий положения в одной точке (точка обсервации) выполняют построение треугольника погрешностей.
Известен способ определения места судна по пеленгам двух ориентиров [3], в котором для повышения точности первым пеленгуют ориентир (предмет), расположенный ближе к диаметральной плоскости судна. Недостатком способа является отсутствие контроля при одиночном определении. Для его устранения производят не одно, а серию определений места, располагающихся на навигационной карте вдоль линии перемещения судна (ПМО) на расстояниях, пропорциональных соответствующим промежуткам времени или плаваниям по пройденному расстоянию с использованием лага (измерителя скорости ПМО). При этом при пеленговании трех ориентиров образуется треугольник погрешностей. Если его стороны равны 5-15 мм (в зависимости от масштаба навигационной карты), то место ПМО принимают в центре. Если треугольник остроугольный и одна сторона меньше других, то место судна принимают внутри треугольника, ближе к его меньшей стороне. Если большой треугольник вызван наличием систематической погрешности (в чем следует убедиться, повторив наблюдения и получив подобный треугольник), тогда следует провести графическое исключение систематической погрешности. Для этого меняют поправку компаса на 3-6 градусов (в любую сторону) и произведя новое построение, получают второй треугольник. Точка пересечения линий положений, соединяющих сходственные вершины треугольника, принимается за место судна.
Недостатком способа является отсутствие контроля правильности измерений и прокладки.
Выявленного недостатка лишен способ определения места судна (корабля) по одновременно измеренным пеленгам нескольких ориентиров [4].
В данном способе измеряют в быстрой последовательности компасные пеленги хорошо видимых (пеленгуемых) и нанесенных на навигационную карту ориентиров, начиная от ориентиров, лежащих ближе к диаметральной плоскости судна. В момент измерения последнего пеленга замечают момент по часам отсчет по лагу. При большой скорости судна пеленги приводят к одному моменту. Далее исправляют компасные пеленги поправкой компаса, прокладывают на карте от соответствующих ориентиров линии вычисленных пеленгов, точка пересечения которых является местом судна. При этом, если при определении по трем (четырем) ориентирам линии пеленгов в одной точке не пересекаются, образуя треугольник погрешностей то:
- если этот треугольник примерно равносторонний и каждая его сторона не более 5 мм в масштабе путевой карты, то место судна принимается в его центре;
- если две стороны треугольника погрешностей имеют вытянутую форму, то место судна принимается ближе к его более короткой стороне;
- если две стороны треугольника погрешностей имеют большие размеры, то проверяют правильность опознания ориентиров, измерений и расчетов и выполняют обсервацию повторно по другим ориентирам.
В навигационной практике при обсервации по трем пеленгам, как правило, точка места судна относится к центру треугольника погрешностей. При этом делается допущение, что площадь треугольника погрешностей служит мерой точной обсервации - чем больше площадь треугольника погрешностей, тем точнее обсервация. Это утверждение имеет смысл, только если известно, что точка обсервации лежит внутри сравниваемых треугольников погрешностей.
Известна гидроакустическая синхронная дальномерная навигационная система [5], содержащая донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа и размещенные на объекте навигации гидроакустический передатчик, генератор синхроимпульсов, М-канальный приемник, М измерителей времени распространения гидроакустических сигналов до приемоответчиков и обратно, М•N блоков преобразования временных интервалов в дистанции по N в каждом из каналов из М, М блоков выбора максимального значения дистанции из N значений и вычислитель координат объекта навигации, в котором каждый из М каналов введены по числу лучевых траекторий N-1 дополнительных измерителей времени распространения гидроакустических сигналов, N-1 мультивибраторов задержки, N-1 мультивибраторов строб-импульса, N-1 селекторов, причем первые входы N-1 измерителей распространения соединены с выходом генератора синхроимпульсов, вторые входы соединены с первыми выходами соответствующих селекторов, а выходы соединены с М•N входами блока преобразования временных интервалов в дистанции, первый вход каждого из селекторов соединен с выходом соответствующего мультивибратора строб-импульса, второй вход соединен с выходом соответствующего канала приемника, вход первого мультивибратора задержки соединен с выходом соответствующего канала приемника, а выход каждого последующего мультивибратора задержки соединен с вторым выходом соответствующего селектора, в каждый из М каналов введена N(N-1), дополнительных блоков преобразования временных интервалов в дистанции, N-1 дополнительных блоков выбора максимального значения дистанции и усреднитель дистанции, причем входы каждого из N-1 наборов по N блоков преобразования временных интервалов в дистанции соединены с соответствующими выходами N-1 дополнительных измерителей временных интервалов, а выходы соединены с входами N-1 дополнительных блоков выбора максимального значения, выходы всех блоков выбора максимального значения дистанции соединены с N входами усреднителя дистанций, а выход усреднителя дистанций соединен с входом вычислителя координат объекта навигации.
Навигационная база таких систем, предварительно устанавливаемая на дне акватории, как правило, состоит из 12-16 маяков ответчиков и предварительно калибруется в относительных и в географических координатах (относительная и абсолютная калибровки) с помощью судна обеспечения оснащенного бортовым комплексом спутниковой и гидроакустической системами навигации.
Работа данного устройства основана на способе определения координат посредством гидроакустической навигационной системы, включающем формирование на морском дне навигационной базы из гидроакустических приемоответчиков (ориентиров), размещение на подводном объекте навигации гидроакустического приемопередатчика, измерение времени распространения гидроакустических сигналов до ориентиров и обратно, определение расстояний между подводным объектом и ориентирами, определение координат подводного объекта по измеренным сигналам, путем формирования массивов полученных измерений (расстояний и/или пеленгов), нанесение на навигационную карту линии положений ориентиров относительно подводного объекта в соответствии с измеренными расстояниями и/или пеленгами, по которым определяют место (координаты) подводного объекта как точку пересечения линий положения на навигационной карте, при этом при непересечении линий положения в одной точке (точка обсервации) выполняют построение треугольника погрешностей.
При реализации каждого из известных способов определения координат по ориентирам [1-5] необходимым условием для получения требуемой точности является, чтобы измеренные параметры, характеризующие линии положения при построении их на навигационной карте, пересекались в одной точке, что обеспечивается только в том случае, если наблюдения, вычисления и прокладка не содержали никаких ошибок. При этом на практике линии пеленгов образуют треугольник погрешностей и если величина сторон треугольника погрешностей небольшая, то вероятное место судна принимают в центре треугольника. Нахождение этих прямых, а следовательно, и места судна является минимаксной оптимизационной задачей. Прямое непосредственное ее решение - сложная задача, поэтому при ее решении известными способами очень сложно получить необходимую точность определения координат подвижных морских объектов относительно ориентиров. Достижение приемлемой точности требует трудоемких расчетов даже при использовании автоматизированных средств. Это обусловлено тем, что существующие стандарты представления чисел в ЭВМ не поддерживают всех необходимых свойств для корректного выполнения арифметических операций. Так, при выполнении арифметических действий в формате с плавающей точкой не выполняются законы коммутативности, ассоциативности и дистрибутивности, обязательные в арифметике (Акритас А. Основы компьютерной алгебры с приложениями. - М.: Мир, 1994. - 544 с.). Это обстоятельство не позволяет найти прямые линии, пересекающиеся в одной точке, для которых сумма отклонений от пеленгов минимальна.
Построение треугольника погрешностей также не решает полностью задачу получения достоверных координат, так как при нахождении погрешностей используется интервальный анализ, который основан на окружении вещественных чисел, характеризующих координаты, интервалами, что приводит к необходимости решения проблемы разной точности числовых данных (противоречие между непрерывными и дискретными значениями). Географические координаты абстрактно определяются в непрерывном пространстве и представляются в виде действительных цифр. Далее действительные числа представляются путем аппроксимации рациональными числами - дискретным множеством. В свою очередь рациональные числа записываются чаще всего в десятичной форме, что еще больше искажает модель непрерывности географических координат. Все это приводит к разной точности в оценке полученных координат, что обусловлено как несоответствием между действительной точностью измерения и представления этого измерения в цифровой форме (несоответствием между количеством обеспеченных точностью значащих цифр и количеством значащих цифр в конечно представленном результате), так и несоответствием в точности двух и более сравниваемых значений координат.
Для получения достоверных данных результаты измерений представляются в цифровой форме с количеством значащих цифр, соответствующих погрешности измерений. Это приводит к избытку значащих цифр, что при представлении измеренной информации приводит к увеличению объемов обрабатываемой информации, увеличению требуемых объемов постоянной памяти для ее хранения и оперативной памяти при ее обработке и самого времени обработки. Источником возникновения разной точности измеренных данных является и процедура обмена информации между ЭВМ и инструментальными средствами измерения. В известных способах для представления значений географических координат используются числа в формате плавающей точки. Поэтому географические координаты, записанные первоначально в градусной мере (рациональными числами), при вводе в ЭВМ переводятся в десятичное представление. Для хранения измеренных географических координат используется формат с максимальной разрядностью, доступной для используемой ЭВМ, что приводит к числам с большим количеством десятичных разрядов, не обеспеченных точностью измерений. При представлении географических координат в ЭВМ в формате с плавающей точкой, соответствующие числовые значения имеют неоправданно высокую точность, а действительная погрешность обычно не определена. Все измеренные значения географических координат представляются десятичными числами с одинаковым числом десятичных разрядов. Количество разрядов определяется не погрешностью измерений географических координат, а разрядностью процессора используемой ЭВМ. Одинаковая разрядность представления географических координат создает иллюзию правомерности выполнения картометрических задач с использованием наборов измеренных данных, имеющих различную точность географических координат.
Кроме того, формирование подводной навигационной базы из М гидроакустических приемоответчиков весьма сложная и дорогостоящая операция.
Задачей настоящего технического предложения является повышение надежности при обеспечении навигации подводных объектов.
Поставленная задача, решается за счет того, что в способе определения координат посредством гидроакустической навигационной системы, включающем формирование на морском дне навигационной базы из гидроакустических приемоответчиков (ориентиров), размещение на подводном объекте навигации гидроакустического приемопередатчика, посредством которых измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками в дальномерном режиме, определение координат подводного объекта по измеренным сигналам, путем формирования массивов полученных измерений (расстояний и/или пеленгов), нанесение на навигационную карту линии положений ориентиров относительно подводного объекта в соответствии с измеренными расстояниями и/или пеленгами, по которым определяют место (координаты) подводного объекта как точку пересечения линий положения на навигационной карте, при этом при непересечении линий положения в одной точке (точка обсервации), выполняют построение треугольника погрешностей, в котором навигационную базу на морском дне формируют путем размещения ориентиров на расстоянии не более 5 км друг от друга, с образованием равнобедренного треугольника в подводном пространстве, в вершинах которого размещены ориентиры, при этом гидроакустические антенны ориентиров и подводного объекта включают четыре приемопередатчика акустических сигналов, установленных на перфорированном кронштейне, с формированием двух одноканальных и одного двухканального приемопередатчиков, с размещением антенн одноканальных приемопередатчиков на расстоянии 1000 мм друг от друга в торцевых зонах перфорированного кронштейна; двухканальный приемопередатчик сформирован из двух приемопередатчиков, отстоящих на расстоянии 50 мм друг от друга, один из которых размещен на расстоянии 200 мм от первого одноканального приемопередатчика, а второй одноканальный приемопередатчик расположен на расстоянии 800 мм от второго одноканального приемопередатчика, приемопередатчики расположены на перфорированном кронштейне с образованием двух измерительных баз, имеющих общий центр; измерение сигналов при глубине погружения подводного подвижного объекта до 500 м, выполняют в режиме ультракороткой базы, а при погружении более 500 м в режимах с длинной базой и/или в комбинированном режиме; при определении расстояний от подводного объекта до трех подводных ориентиров минимизируют сумму квадратичных ошибок измерений расстояний от подводного объекта до подводных ориентиров путем нахождения минимума квадратов погрешностей измерений, при этом местоположение подводного объекта на плоскости определяют путем использования трех полученных значений расстояний от подводного объекта до подводных ориентиров и минимизированной суммой квадратичных ошибок и расстояний между ориентирами, а при определении местоположения по измеренным компасным пеленгам определяют класс конфигураций, образуемых точкой обсервации подводного объекта с подводными ориентирами, по которому судят о величине погрешности в определении местоположения подводного объекта.
Совокупность новых отличительных признаков, заключающаяся в том, что навигационную базу на морском дне формируют путем размещения ориентиров на расстоянии не более 5 км друг от друга, с образованием равнобедренного треугольника в подводном пространстве, в вершинах которого размещены ориентиры, при этом гидроакустические антенны ориентиров и подводного объекта включают четыре приемопередатчика акустических сигналов, установленных на перфорированном кронштейне, с формированием двух одноканальных и одного двухканального приемопередатчиков, с размещением антенн одноканальных приемопередатчиков на расстоянии 1000 мм друг от друга в торцевых зонах перфорированного кронштейна; двухканальный приемопередатчик сформирован из двух приемопередатчиков, отстоящих на расстоянии 50 мм друг от друга, один из которых размещен на расстоянии 200 мм от первого одноканального приемопередатчика, а второй одноканальный приемопередатчик расположен на расстоянии 800 мм от второго одноканального приемопередатчика, приемопередатчики расположены на перфорированном кронштейне с образованием двух измерительных баз, имеющих общий центр; измерение сигналов при глубине погружения подводного подвижного объекта до 500 м, выполняют в режиме ультракороткой базы, а при погружении более 500 м в режимах с длинной базой и/или в комбинированном режиме; при определении расстояний от подводного объекта до трех подводных ориентиров минимизируют сумму квадратичных ошибок измерений расстояний от подводного объекта до подводных ориентиров путем нахождения минимума квадратов погрешностей измерений, при этом местоположение подводного объекта на плоскости определяют путем использования трех полученных значений расстояний от подводного объекта до подводных ориентиров и минимизированной суммой квадратичных ошибок и расстояний между ориентирами, а при определении местоположения по измеренным компасным пеленгам определяют класс конфигураций, образуемых точкой обсервации подводного объекта с подводными ориентирами, по которому судят о величине погрешности в определении местоположения подводного объекта, из известного уровня техники не выявлена, что позволяет сделать вывод о соответствии заявляемого технического предложения условию патентоспособности «изобретательский уровень».
Сущность способа поясняется чертежами.
Фиг.1. Поверхности положения подводного объекта в гидроакустической навигационной системе с ультракороткой базой, где показаны приемопередатчики 1, 2, 3, 4, подводный ориентир 5.
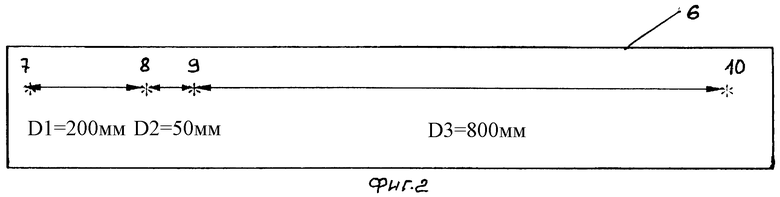
Фиг.2. Взаимное расположение приемопередатчиков. Перфорированный кронштейн 6, приемопередатчики 7, 8, 9, 10.
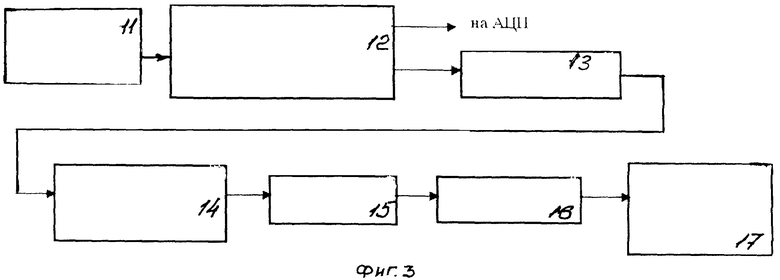
Фиг.3. Функциональная схема приема сигнала "включение", которая включает формирователь характеристики направленности (ФХН) 11, широкополосный фильтр 12 с коррекцией амплитудно-частотной характеристики, ограничитель 13, узкополосный фильтр 14, детектор 15, интегратор 16, пороговую схему 17.
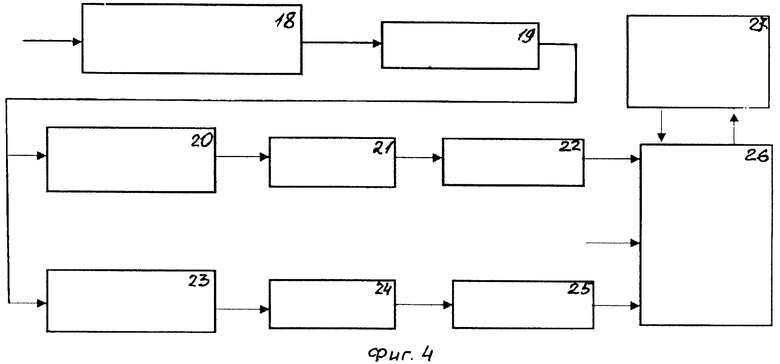
Фиг.4. Функциональная схема обработки сигналов, которая включает широкополосный фильтр 18 с коррекцией амплитудно-частотной характеристики, ограничитель 19, два узкополосных фильтра 20 и 23, два детектора 21 и 24, два интегратора 22 и 25, пороговую схему 26, схему выбора максимума 27.
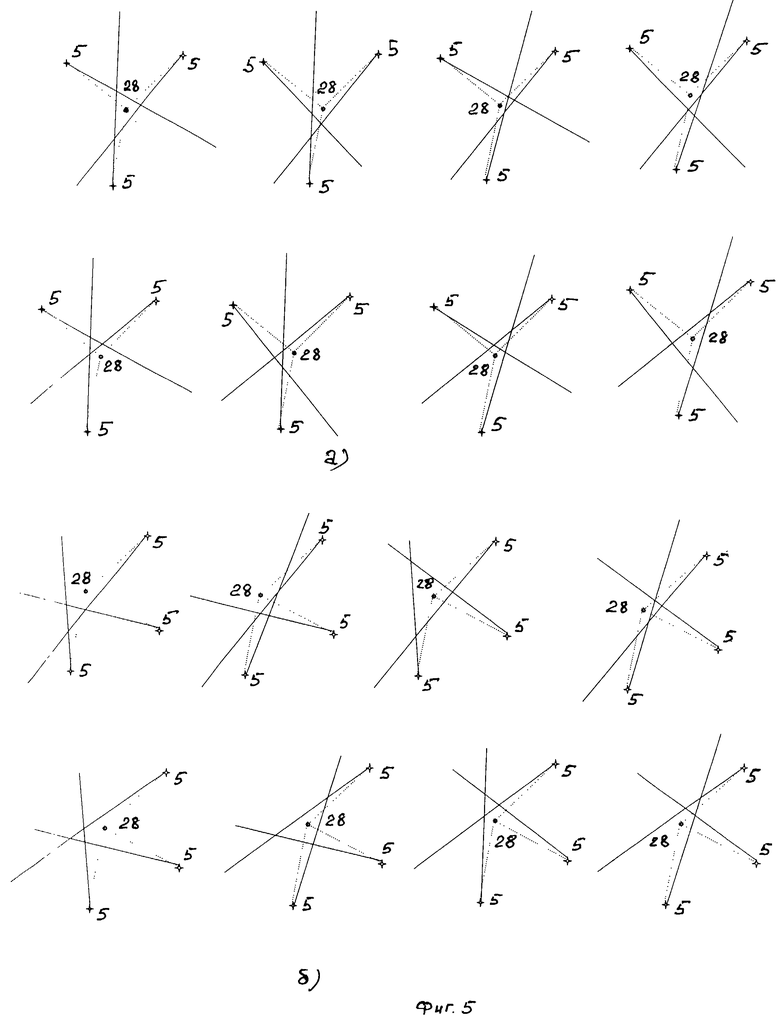
Фиг.5. Типичные ситуации нахождения измеренных пеленгов. Подводные ориентиры 5, точка обсервации 28. Сплошные линии - измеренные пеленги, пунктирные линии - истинные пеленги.
Навигация подводного объекта относительно донных приемоответчиков осуществляется как в режиме с длинной, ультракороткой базой (ДБ и УКБ), так и в комбинированном режиме ДБ/УКБ.
Подводный объект оснащается соответствующими режиму работ гидроакустическими приемопередающими антеннами, навигационным контроллером и навигационным программно-математическим обеспечением.
При навигации подводного объекта при ее работе на глубинах более одного километра целесообразно работать на частотах в диапазоне от 8 до 15 КГц, при этом энергетическая дальность связи с подводным ориентиром будет достигать 10-14 км, а погрешность определения координат аппарата составит 7-10 м в режиме ДБ и 0,3% от дальности в режиме УКБ и 0,5 град, по углу пеленгации. При рабочей глубине менее одного километра, целесообразно использовать рабочие частоты в диапазоне 25-35 кГц и работать в режиме УКБ. При этом максимальная дальность связи будет достигать порядка 3 км.
Каждый сигнал подводного приемоответчика имеет специальный формат и кодировку и несет в себе информацию о географических координатах, его индивидуальном номере. Алгоритм работы навигационной системы имеет гибкую структуру и может быть легко адаптирован как под заранее прокладываемый маршрут подводного объекта на полигоне, так и под определение координат подводного объекта в любое конкретное время ее работы на полигоне в различных гидрологических условиях, условиях шума.
Подводный объект фиксирует дистанцию и пеленг до приемоответчика (режим УКБ) и вычисляет свои точные географические координаты. Наиболее оптимальная дальность связи в режиме УКБ, при глубине подводного объекта до 500 метров - 1 км. Точность определения координат до 5 метров.
Устройство для реализации заявляемого способа представляет собой гидроакустическую навигационную систему с комбинированной системой гидроакустической навигации с длинной и ультракороткой базой, которая позволяет использовать пеленгационную систему решения задачи выхода подводного объекта в точку установки донного приемоответчика. При этом гидроакустическая антенна донных приемоответчиков, как и подводного подвижного объекта, представляет две имеющие общий центр базы из приемников. При этом, если две приемные базы расположены в плоскости, параллельной плоскости палубы, и ортогональны, ось одной базы направлена вдоль осевой линии подводного объекта, а ось другой базы направлена по траверзу вправо.
Две имеющие общий центр базы из приемников позволяют определить направление на источник сигнала как линию пересечения двух конических поверхностей с совпадающими вершинами. Сдвиг фаз Δφ1 электрических сигналов двух точечных приемников (первого и второго), поступающих на входы приемного тракта, связан с углом между базовой линией и направлением прихода сигнала соотношением (фиг.1): Δφ1=kcosα, где α - угол прихода сигнала, k - коэффициент, равный k=2πf0b/с, где b - длина базовой линии, f0 - несущая частота, с - скорость звука в точке приема сигнала. Таким образом α=arccos(Δφ1/k). Сдвиг фаз Δφ2 электрических сигналов двух точечных приемников (третьего и четвертого), поступающих на входы приемного тракта, связан с углом между базовой линией и направлением прихода соотношением Δφ2=kcosβ,
β=arccosΔφ2/k. Введя вспомогательные углы φ и ψ, получим, что при известной глубине Н подводного объекта выражения для координат подводного объекта Х0, У0 относительно центра базы. При этом плоскость с ординатой Н является третьей поверхностью положения. Очевидно, что
cosψ=D/R, где D - дистанция, R - наклонная дальность, cosψ=x/D,
cosα=x/R(cosΨcosφ=(Dx)/(RD)=x/R, cosβ=у/R(cosΨcosφ)=(Dу)/(RD)=у/R
При этом cosα=cosΨcosφ, cosβ=cosΨsinφ, X0=Hcosφ/tgΨ,
Y0=Hsinφ/tgΨ. Откуда получаем x0=сНΔφ1/а; у0=сНΔφ2/b.
Так как плоскость палубы практически никогда не совпадает с плоскостью горизонта, то учитываются также влияние углов крена η и дифферента γ. Дифферент не сказывается на значении у0, а крен на значении х0. Ось X направлена вдоль продольной оси подводного объекта, а ось У направлена по траверзу. Исправленные путем учета крена и дифферента значения координат маяка можно записать следующим образом: x1=Htg[arctg([0/H)+γ], у1=Htg[arctg(у0/H)+η], где γ и η - положительные значения при опускания носа и правого борта.
В том случае, когда определяется также наклонное расстояние до донного приемоответчика, третьей поверхностью положения является сфера с радиусом, равным наклонному расстоянию. Формулы для вычисления координат упрощаются и имеют вид х0=(cRΔφ12)/α, у0=(cRΔφ32)/β.
Каждая приемная гидроакустическая антенна состоит из четырех гидрофонов. Секция антенны состоит из двух одноканальных и одного двухканального модуля (фиг.2), располагающихся на линейном несущем кронштейне 6. Расстояние между приемными гидрофонами двухканального модуля составляет 50 мм. Максимальное разнесение крайних приемников на кронштейне составляет 1000 мм. Кронштейн 6 перфорирован, что позволяет располагать приемники 1, 2, 3, 4 в непосредственной близости друг от друга для проведения фазовой калибровки и с произвольным разнесением для проведения измерений направления прихода акустического сигнала. В качестве антенн приемников использованы пьезокерамические сферы диаметром 30 мм, внутри которых размещены предварительные усилители с коэффициентом усиления 30 дБ. Сферы размещаются на стальной пластине размером 145×145×10 мм, снабженной элементами крепления и акустической заглушкой с тыльной стороны. Коэффициент подавления звукового сигнала с тыльной стороны составляет не менее 30 дБ.
Антенный комплекс состоит из 8-канальной 2-секционной приемной гидроакустической антенны и гидроакустической излучающей антенны.
Каждая секция приемной антенны представляет собой 4-элементный неэквидистантный гидрофонный модуль, предназначенный для измерения проекции вектора прихода акустического сигнала на одну из горизонтальный осей в режиме ультракороткой базы, в пеленгационном режиме, либо для приема сигналов в режиме длинной базы на 4 рабочих частотах. Секции приемной антенны расположены в горизонтальной плоскости перпендикулярно друг к другу.
Таким образом, когда все гидрофоны производят прием на одной и той же рабочей частоте, реализуется режим определения задержки и направления прихода отклика от фиксированного донного приемоответчика в режиме ультракороткой базы, а когда каждый из гидрофонов настроен на свою рабочую частоту осуществляется режим измерения задержек от нескольких донных приемоответчиков в режиме длинной базы. Система передачи информации по гидроакустическому каналу на подводном объекте реализуется с использованием штатных средств гидроакустической связи. При этом, в качестве устройств формирования и обработки сигналов могут быть применены, как имеющая в составе гидроакустическая аппаратура, обеспечивающая режим гидроакустической связи, так и дополнительные устройства в виде приставок, подключаемых к их передающему и приемному трактам.
В качестве сигналов местоположения использованы тональные сигналы с частотой 3 кГц, излучаемые как в автоматическом режиме по специальной программе, так и в режиме запроса.
Для систем передачи информации, основанных на использовании тональных сигналов, помехоустойчивость системы определяется помехоустойчивостью обнаружителей сигнала "Включение" и обнаружителей информационных сигналов. Для обнаружения сигнала "Включение", представляющего собой отрезок гармонического колебания, использован метод неоптимального некогерентного приема, обеспечивающий широкополосный прием с интегрированием после детектора. Функционально схема включает (фиг.3) формирователь характеристики направленности (ФХН) 11, обеспечивающий предварительное усиление и формирование ненаправленного пространственного канала с антенны донного ответчика, широкополосный фильтр 12 с полосой ΔFш, ограничитель 13, узкополосный фильтр 14 с полосой ΔFу, который с ограничителем 13 образуют схему, обеспечивающую, при условии Fш/ΔFу>>1, стабилизацию помехи и подавления импульсной (широкополосной) помехи и обеспечивающую выравнивание спектра помехи на входе ограничителя 13, детектор 15, имеющий линейную характеристику, интегратор 16, представляющий собой фильтр нижних частот с эффективной полосой пропускания ΔFu=1/Т, где Т=2 сек (длительность символа), пороговую схему 17, построенную на основании критерия Неймана-Пирсона, поскольку вероятность появления на ее входе сигнала существенно ниже вероятности его отсутствия.
Функциональная схема обработки сигнала (фиг.4) включает широкополосный фильтр 18 с полосой ΔFш, ограничитель 19 и узкополосный фильтр 20 с полосой Δfу, которые образуют схему, обеспечивающую, при условии ΔFш/ΔFу>>1, стабилизацию помехи и подавления импульсной (широкополосной) помехи и выравнивание спектра помехи на входе ограничителя 19, детектор 21, имеющий линейную характеристику, интегратор 22, который представляет собой фильтр нижних частот с эффективной полосой пропускания ΔFu=1/Т, где Т=0,5 сек (длительность символа), узкополосный фильтр 23, детектор 24, интегратор 25, пороговую схему 26, обеспечивающую отбор максимального сигнала для последующего сравнения его с заданным порогом, схему выбора максимума 27, построенную на основании критерия идеального наблюдателя, поскольку весомость ошибок типа "ложная тревога" и типа "пропуск сигнала" можно считать одинаковым, то порог в схеме выбран из условия минимизации полной вероятности ошибки, при этом после превышения порога в схему выбора максимума 27 поступает команда отключающая канал с максимальным сигналом.
Таким образом, обработка сигнала при приеме сообщения сводится к обнаружению отдельных тональных сигналов с вероятностями F и D такими, чтобы сумма F+(1-D) не превышала 0,01, причем F+1-D.
Способ реализуется следующим образом.
Формируют подводную навигационную базу, состоящую из трех акустических приемоответчиков (ориентиров), размещенных на расстоянии не более 5 км друг от друга, с образованием равнобедренного треугольника в подводном пространстве, в вершинах которого размещают донные гидроакустические приемоответчики (ориентиры). При постановке и размещении донных ориентиров посредством плавсредств, оснащенных спутниковой навигационной системой, определяют их координаты.
Гидроакустические антенны ориентиров и подводного объекта включают четыре приемопередатчика акустических сигналов, установленных на перфорированном кронштейне, с формированием двух одноканальных и одного двухканального приемопередатчиков, с размещением антенн одноканальных приемопередатчиков на расстоянии 1000 мм друг от друга в торцевых зонах перфорированного кронштейна. Каждый двухканальный приемопередатчик сформирован из двух приемопередатчиков, отстоящих на расстоянии 50 мм друг от друга, один из которых размещен на расстоянии 200 мм от первого одноканального приемопередатчика, а второй одноканальный приемопередатчик расположен на расстоянии 800 мм от второго одноканального приемопередатчика. Приемопередатчики расположены на перфорированном кронштейне с образованием двух измерительных баз, имеющих общий центр. Измерение сигналов при глубине погружения подводного подвижного объекта до 500 м выполняют в режиме ультракороткой базы, а при погружении более 500 м в режимах с длинной базой и/или в комбинированном режиме.
При определении расстояний от подводного объекта до трех подводных ориентиров посредством гидроакустических средств минимизируют сумму квадратичных ошибок измерений расстояний от подводного объекта до подводных ориентиров путем нахождения минимума квадратов погрешностей измерений. При этом местоположение подводного объекта на плоскости определяют путем использования трех полученных значений расстояний от подводного объекта до подводных ориентиров и минимизированной суммой квадратичных ошибок и расстояний между ориентирами. Посредством гидроакустической навигационной системы выполняют пеленгование ориентиров в активном или пассивном режимах. В результате пеленгования получают массив данных (расстояний и/или пеленгов). Наносят на навигационную карту положения ориентиров и измеренных пеленгов. Для определения координат подвижного морского объекта выполняют построения. Выбирают каждые три прямые линии, которые пересекаются в одной точке. Минимизируют сумму квадратичных ошибок измеренных расстояний от подводного объекта до подводных ориентиров путем нахождения минимума квадратов погрешностей измерений.
Далее числовые значения полученных координат представляются в виде символов, количество которых соответствует представлению числа с заданной точностью, что практически равно числу разрядов в двоичном представлении этого числа с той же точностью. При этом запись числа в символьной системе содержит информацию не только об измеренном значении, но и содержит информацию о погрешности представления числа. Эта операция осуществляется посредством ЭВМ, составляющей наряду со средствами измерения расстояний и пеленгов и графопостроителем автоматизированную систему определения места подвижного морского объекта. При этом символьное представление чисел, характеризующих измеренные значения координат, осуществляется путем построения бинарного дерева Штерна - Броко (Грэхем Р., Кнут Д., Паташник О. Конкретная математика. - М.: БИНОМ. Лаборатория знаний, 2006. - 703 с.). Последовательность символов в представлении числа, характеризующего координаты, определяет все соответствующие узлы в дереве Штерна - Броко. Для наинизшего узла находятся его соседи, как по вертикали, так и по горизонтали, что позволяет оценить точность представления числа и при необходимости перейти к представлению этого числа с другой (требуемой) точностью, что позволяет при сравнении полученных координат исключить из обработки разнотонные данные при определении координат подвижного морского объекта.
При определении местоположения по измеренным компасным пеленгам определяют класс конфигураций, образуемых точкой обсервации подводного объекта с подводными ориентирами, по которому судят о величине погрешности в определении местоположения подводного объекта. При этом измеряют компасные пеленги измеренные и нанесенные на навигационную карту ориентиров, начиная от ориентиров, лежащих ближе к диаметральной плоскости судна.
Исправляют компасные пеленги поправкой компаса. Прокладывают на навигационной карте от соответствующих ориентиров линии вычисленных пеленгов, точка пересечения которых является местом судна. При этом, если при определении по трем ориентирам линии пеленгов в одной точке не пересекаются, образуя треугольник погрешностей, выполняют построение треугольника погрешностей, включающего точку обсервации в следующей последовательности.
Полученные значения трех измеренных пеленгов {φ1, φ2, φ3} пронумеровывают по порядку.
Задают значение угла α, по величине сравнимого с предполагаемым значением абсолютной ошибки при измерении пеленгов, соответствующей величине поправки компаса.
Определяют класс конфигураций, образуемый точкой обсервации и ориентирами.
Рассчитывают значения пеленгов {ϕ1, ϕ2, ϕ3} с учетом величины поправки компаса при этом:
- для ситуации класса А (точки обсервации находятся в треугольнике): складывают (или вычитают) значения {φ1, φ2, φ3} и α;
- для ситуации класса В (точки обсерваций находятся вне треугольника): складывают (или вычитают) значения {φ1, φ3} и α и вычитают (или складывают) значения {φ2} и α;
- по полученным значениям пеленгов {ϕ1, ϕ2, ϕ3} строят треугольник погрешностей.
Величину погрешности устанавливают по значениям точек обсервации, находящихся внутри треугольника.
Реализация способа технической сложности не представляет, так как он может быть реализован на серийно выпускаемых гидроакустических средствах и элементах микроэлектроники, что позволяет сделать вывод о соответствии заявляемого технического решения условию патентоспособности «промышленная применимость».
Источники информации
1. A high-resolution pulse - Dopplec underusatoc acoustic navigation System IEEE Jornal of oceanie chgineering, 1976, № 1, p.6-13.
2. Авторское свидетельство СССР № 713278, кл. G01S 15/08, 1978.
3. Справочник капитана дальнего плавания. Под ред. Ермолаева Г.Г. М.: Транспорт, 1988, с.147, 149.
4. Справочник штурмана. Под ред. Шандабылова В.Д. М.: Военное издательство, 1968, с.140-142.
5. Патент РФ №2032187.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2453865C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДРЕЙФА МОРСКИХ ЛЬДОВ | 2010 |
|
RU2416070C1 |
Изобретение относится к гидроакустике, в частности к гидроакустическим навигационным системам, работающим при наличии отражающих границ раздела, а более конкретно к определению координат преимущественно подводных подвижных аппаратов. Техническим результатом изобретения является повышение надежности. Указанный результат достигается благодаря определенному размещению ориентиров, формирующих навигационную базу, строению гидроакустических антенн ориентиров и подводного объекта, а также минимизации суммы квадратичных ошибок измерений расстояний от подводного объекта до подводных ориентиров путем нахождения минимума квадратов погрешностей измерений. При этом местоположение подводного объекта на плоскости определяют путем использования трех полученных значений расстояний от подводного объекта до подводных ориентиров и минимизированной суммой квадратичных ошибок и расстояний между ориентирами, а при определении местоположения по измеренным компасным пеленгам определяют класс конфигураций, образуемых точкой обсервации подводного объекта с подводными ориентирами, по которому судят о величине погрешности в определении местоположения подводного объекта. 5 ил.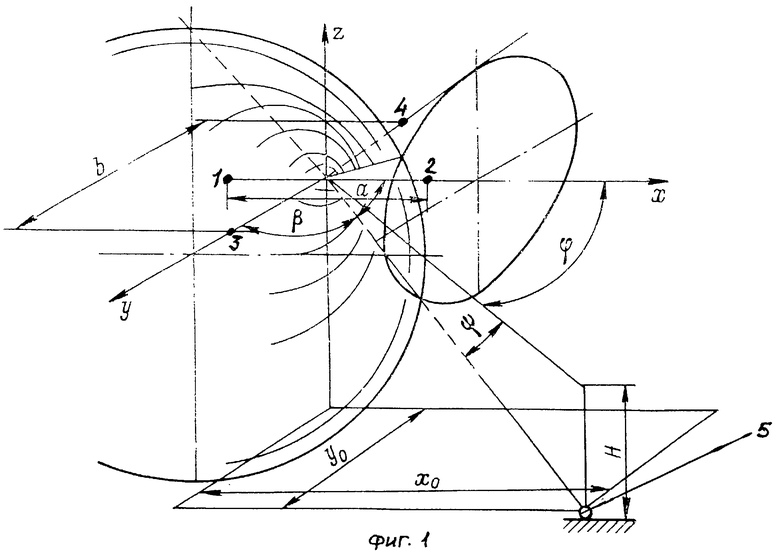
Способ определения координат посредством гидроакустической навигационной системы, включающий формирование на морском дне навигационной базы из гидроакустических приемоответчиков (ориентиров), размещение на подводном объекте навигации гидроакустического приемопередатчика, посредством которых измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между подводным объектом и гидроакустическими приемоответчиками в дальномерном режиме, определение координат подводного объекта по измеренным сигналам путем формирования массивов полученных измерений (расстояний и/или пеленгов), нанесение на навигационную карту линии положений ориентиров относительно подводного объекта в соответствии с измеренными расстояниями и/или пеленгами, по которым определяют место (координаты) подводного объекта как точку пересечения линий положения на навигационной карте, при этом при непересечении линий положения водной точке (точка обсервации) выполняют построение треугольника погрешностей, отличающийся тем, что навигационную базу на морском дне формируют путем размещения ориентиров на расстоянии не более 5 км друг от друга, с образованием равнобедренного треугольника в подводном пространстве, в вершинах которого размещены ориентиры, при этом гидроакустические антенны ориентиров и подводного объекта включают четыре приемопередатчика акустических сигналов, установленных на перфорированном кронштейне, с формированием двух одноканальных и одного двухканального приемопередатчиков, с размещением антенн одноканальных приемопередатчиков на расстоянии 1000 мм друг от друга в торцевых зонах перфорированного кронштейна; двухканальный приемопередатчик сформирован из двух приемопередатчиков, отстоящих на расстоянии 50 мм друг от друга, один из которых размещен на расстоянии 200 мм от первого одноканального приемопередатчика, а второй одноканальный приемопередатчик расположен на расстоянии 800 мм от второго одноканального приемопередатчика, приемопередатчики расположены на перфорированном кронштейне с образованием двух измерительных баз, имеющих общий центр; измерение сигналов при глубине погружения подводного подвижного объекта до 500 м выполняют в режиме ультракороткой базы, а при погружении более 500 м - в режимах с длинной базой и/или в комбинированном режиме; при определении расстояний от подводного объекта до трех подводных ориентиров минимизируют сумму квадратичных ошибок измерений расстояний от подводного объекта до подводных ориентиров путем нахождения минимума квадратов погрешностей измерений, при этом местоположение подводного объекта на плоскости определяют путем использования трех полученных значений расстояний от подводного объекта до подводных ориентиров и минимизированной суммой квадратичных ошибок и расстояний между ориентирами, а при определении местоположения по измеренным компасным пеленгам определяют класс конфигураций, образуемых точкой обсервации подводного объекта с подводными ориентирами, по которому судят о величине погрешности в определении местоположения подводного объекта.
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2032187C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| НАВИГАЦИОННАЯ ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА | 1972 |
|
SU1840781A1 |
| KR 20080085509 А, 24.09.2008 | |||
| JP 2008128968 А, 05.06.2008. | |||

