Область техники
Настоящее изобретение относится к конструкции для балансировки орудийного ствола системы вооружения, установленной на транспортном средстве. Настоящее изобретение также относится к способу для балансировки орудийного ствола системы вооружения, установленной на транспортном средстве. Настоящее изобретение также относится к транспортному средству.
Уровень техники
Боевые транспортные средства, такие как боевые машины пехоты или танки, могут быть оснащены системой вооружения, связанной с башней, при этом система вооружения содержит орудийный ствол, прикрепленный к башне посредством орудийного лафета (см., например, публикацию патента США № 5014594 A). Чтобы управлять ориентацией орудийного ствола, орудийный ствол выполняется с возможностью перемещения посредством вращения башни, при этом вертикальная наводка орудийного ствола выполняется с возможностью управления посредством мотора орудийного лафета.
Для того, чтобы поддерживать точную ориентацию/наведение орудийного ствола, одним важным аспектом является балансировка орудийного ствола. Это очень важно, когда транспортное средство движется по пересеченной местности.
Таким образом, существует необходимость предоставлять конструкцию для улучшенной балансировки орудийного ствола.
Цели изобретения
Целью настоящего изобретения является создание конструкции для балансировки орудийного ствола системы вооружения, установленной на транспортное средство.
Другой целью настоящего изобретения является создание способа для балансировки орудийного ствола системы вооружения, установленной на транспортное средство.
Другой целью настоящего изобретения является создание транспортного средства, содержащего такую конструкцию.
Сущность изобретения
Эти и другие цели, понятные из последующего описания, достигаются посредством конструкции и способа для балансировки орудийного ствола системы вооружения, установленной на транспортное средство, и транспортного средства, как изложено в прилагаемых независимых пунктах формулы изобретения. Предпочтительные варианты осуществления конструкции подвески для гусеничного транспортного средства определяются в прилагаемых зависимых пунктах формулы изобретения.
В частности, цель изобретения достигается посредством конструкции для балансировки орудийного ствола системы вооружения, установленной на транспортное средство. Система вооружения содержит орудийный ствол, установленный на башню через орудийный лафет. Орудийный лафет выполняется с возможностью позволять вертикальную наводку орудийного ствола относительно оси вертикальной наводки. Упомянутая конструкция содержит систему подвески, сконфигурированную, чтобы предоставлять крутящий момент, препятствующий нарушению баланса орудийного ствола. Конструкция дополнительно содержит регулирующее устройство для автоматической регулировки крутящего момента, обеспечиваемого системой подвески, на основе нарушения баланса орудийного ствола, чтобы динамически противодействовать нарушению баланса орудийного ствола.
Конструкция согласно настоящему изобретению содержит регулирующее устройство для регулировки крутящего момента, обеспечиваемого системой подвески, на основе нарушения баланса орудийного ствола, чтобы противодействовать нарушению баланса орудийного ствола.
Таким образом, балансировка орудийного ствола может регулироваться точным и эффективным способом. Таким образом, посредством автоматической регулировки крутящего момента, обеспечиваемого системой подвески, на основе нарушения баланса орудийного ствола, например, вследствие веса орудийного ствола и/или наклона транспортного средства, динамическое противодействие нарушению баланса орудийного ствола может быть эффективно предоставлено. Таким образом, при этом динамическое противодействие нарушению баланса орудийного ствола может быть получено в противоположность необходимости статического крутящего момента. Таким образом, работа орудийного ствола во время движения транспортного средства, например, по пересеченной местности может быть улучшена.
Автоматическая регулировка крутящего момента, обеспечиваемого системой подвески, на основе нарушения баланса орудийного ствола означает, что если существует изменение орудийного ствола, так что орудийный ствол является несбалансированным, т.е. существует нарушение баланса орудийного ствола, регулирующее устройство конфигурируется, чтобы регулировать крутящий момент для противодействия нарушению баланса. Таким образом, регулирующее устройство обеспечивает динамическую регулировку крутящего момента, обеспечиваемого подвеской, на основе нарушения баланса орудийного ствола.
Согласно варианту осуществления конструкции система подвески содержит торсионный стержень, имеющий первый концевой участок, сконфигурированный, чтобы неподвижно прикрепляться к башне, и второй концевой участок, сконфигурированный, чтобы соединяться с орудийным лафетом, чтобы предоставлять упомянутый крутящий момент. Таким образом, посредством использования торсионного стержня для предоставления крутящего момента, противодействующего нарушению баланса орудийного ствола упомянутая автоматическая регулировка обеспечивается. Регулирующее устройство, таким образом, конфигурируется, чтобы регулировать крутящий момент на торсионном стержне на основе нарушения баланса орудийного ствола, чтобы противодействовать нарушению баланса орудийного ствола.
Согласно варианту осуществления конструкции регулирующее устройство содержит блок актуатора, сконфигурированный, чтобы предоставлять упомянутую автоматическую регулировку крутящего момента, обеспечиваемого системой подвески, на основе данных датчиков, указывающих текущее нарушение баланса орудийного ствола. Согласно варианту осуществления конструкции блок актуатора конфигурируется, чтобы предоставлять упомянутую регулировку крутящего момента, обеспечиваемого на торсионном стержне, на основе данных датчиков, указывающих текущее нарушение баланса орудийного ствола. Таким образом, посредством использования блока актуатора и обеспечения упомянутой автоматической регулировки на основе данных датчиков, указывающих текущее нарушение балансировки орудийного ствола, упомянутая автоматическая регулировка может быть эффективно и точно предоставлена и отрегулирована. При этом эффективное и точное управление противодействием нарушению баланса орудийного ствола получается. Таким образом, динамическое противодействие нарушению баланса орудийного ствола при этом эффективно и автоматически управляется. Блок актуатора может быть любым подходящим блоком для обеспечения упомянутой автоматической регулировки, например, электрическим актуатором, например, любым подходящим электрическим мотором, сервомотором, шаговым мотором или т.п.
Согласно варианту осуществления конструкции данные датчиков, указывающие текущее нарушение баланса орудийного ствола, содержат усилие, требуемое для привода конструкции для приведения в действие орудийного лафета, и/или текущую вертикальную наводку орудийного ствола и/или текущие наклоны относительно продольной и поперечной осей транспортного средства и/или текущий вес орудийного ствола. Таким образом, основывая автоматическую регулировку на одних или более из упомянутых данных датчиков, эффективная и точная автоматическая регулировка обеспечивается. При этом эффективное и точное управление противодействием нарушению баланса орудийного ствола получается.
Согласно варианту осуществления конструкция содержит устройство управления, сконфигурированное, чтобы управлять регулирующим устройством на основе упомянутых данных датчиков, указывающих текущее нарушение баланса орудийного ствола. Устройство управления конфигурируется, чтобы управлять блоком актуатора на основе упомянутых данных датчиков, указывающих текущее нарушение баланса орудийного ствола. Устройство управления согласно аспекту настоящего изобретения конфигурируется, чтобы принимать и обрабатывать упомянутые данные датчиков. Устройство управления согласно аспекту настоящего изобретения функционально соединяется с блоком актуатора. При этом эффективное управление автоматической регулировкой обеспечивается. При этом эффективное и точное управление противодействием нарушению баланса орудийного ствола получается.
Согласно варианту осуществления конструкции регулирующее устройство содержит последовательную рычажную конфигурацию, сконфигурированную, чтобы обеспечивать упомянутую автоматическую регулировку крутящего момента, обеспечиваемого системой подвески, на основе вертикальной наводки орудийного ствола. При этом эффективная и точная автоматическая регулировка может быть обеспечена механическим образом, т.е. без какого-либо блока актуатора/электронного соединения.
Согласно варианту осуществления конструкции последовательная конфигурация рычажного механизма содержит первое некруглое зубчатое колесо, прикрепленное к торсионному стержню, и второе некруглое зубчатое колесо, прикрепленное к орудийному лафету в соединении с осью вертикальной наводки и сконфигурированное, чтобы передавать крутящий момент первому некруглому зубчатому колесу во время вертикальной наводки орудийного ствола. При этом эффективная и точная автоматическая регулировка может быть обеспечена механическим образом, т.е. без какого-либо блока актуатора/электронного соединения.
В частности, цель изобретения достигается посредством способа, выполняемого посредством устройства управления для балансировки орудийного ствола системы вооружения, установленной на транспортное средство. Система вооружения содержит орудийный ствол, установленный на башню через орудийный лафет. Орудийный лафет выполняется с возможностью позволять вертикальную наводку орудийного ствола относительно оси вертикальной наводки. Способ содержит этап предоставления крутящего момента, препятствующего нарушению баланса орудийного ствола, посредством системы подвески. Способ дополнительно содержит этап: автоматической регулировки крутящего момента, обеспечиваемого системой подвески, на основе нарушения баланса орудийного ствола, чтобы динамически противодействовать нарушению баланса орудийного ствола.
Согласно варианту осуществления способа система подвески содержит торсионный стержень, имеющий первый концевой участок, сконфигурированный, чтобы неподвижно прикрепляться к башне, и второй концевой участок, сконфигурированный, чтобы соединяться с орудийным лафетом, чтобы предоставлять упомянутый крутящий момент.
Согласно варианту осуществления способ содержит этап: определения текущего нарушения баланса орудийного ствола; и обеспечения упомянутой автоматической регулировки посредством блока актуатора на основе данных датчиков из определенного, таким образом, нарушения баланса орудийного ствола.
Согласно варианту осуществления способа этап определения текущего нарушения баланса орудийного ствола содержит один или более этапов: определения усилия, требуемого приводной конструкцией для приведения в действие орудийного лафета; обнаружения текущей вертикальной наводки орудийного ствола; обнаружения текущих наклонов относительно продольной и поперечной осей транспортного средства; и определения текущего веса орудийного ствола.
Способ согласно настоящему изобретению имеет преимущества согласно соответствующей конструкции, как изложено в данном документе.
В частности, цель изобретения достигается посредством транспортного средства, содержащего конструкцию для балансировки орудийного ствола системы вооружения, установленной на транспортном средстве, как изложено в данном документе.
Согласно варианту осуществления транспортное средство является гусеничным транспортным средством. Согласно варианту осуществления транспортное средство является боевым транспортным средством.
Таким образом, согласно первому объекту настоящего изобретения создана конструкция для балансировки орудийного ствола системы вооружения, установленной на транспортное средство, причем система вооружения содержит орудийный ствол, установленный на башню посредством орудийного лафета, при этом орудийный лафет выполнен с возможностью обеспечения вертикальной наводки орудийного ствола относительно оси вертикальной наводки, причем конструкция содержит систему подвески, выполненную с возможностью обеспечения крутящего момента, препятствующего нарушению балансировки орудийного ствола, причем конструкция содержит регулирующее устройство для автоматической регулировки крутящего момента, обеспечиваемого системой подвески, на основе нарушения балансировки орудийного ствола, чтобы динамически противодействовать нарушению балансировки орудийного ствола; при этом система подвески содержит торсионный стержень, имеющий первый концевой участок, выполненный с возможностью неподвижного прикрепления к башне, и второй концевой участок, выполненный с возможностью присоединения к орудийному лафету, чтобы обеспечивать указанный крутящий момент; причем регулирующее устройство выполнено с возможностью регулировки крутящего момента на торсионном стержне на основе нарушения балансировки орудийного ствола, чтобы противодействовать нарушению балансировки орудийного ствола.
Предпочтительно, регулирующее устройство содержит блок актуатора, выполненный с возможностью обеспечения упомянутой автоматической регулировки крутящего момента, обеспечиваемого системой подвески, на основе данных от датчиков, указывающих текущее нарушение баланса орудийного ствола.
Предпочтительно, данные от датчиков, указывающие текущее нарушение балансировки орудийного ствола, содержат усилие, требуемое приводной конструкцией для приведения в действие орудийного ствола, и/или текущую вертикальную наводку орудийного ствола и/или текущий наклон относительно продольной и поперечной осей транспортного средства и/или текущий вес орудийного ствола.
Предпочтительно, конструкция содержит устройство управления, выполненное с возможностью управления регулирующим устройством на основе упомянутых данных от датчиков, указывающих текущее нарушение балансировки орудийного ствола.
Предпочтительно, регулирующее устройство содержит последовательную рычажную конфигурацию, выполненную с возможностью обеспечения упомянутой автоматической регулировки крутящего момента, обеспечиваемого системой подвески, на основе вертикальной наводки орудийного ствола.
Предпочтительно, последовательная рычажная конфигурация содержит первое некруглое зубчатое колесо, прикрепленное к торсионному стержню, и второе некруглое зубчатое колесо, прикрепленное к орудийному лафету в соединении с осью вертикальной наводки и выполненное с возможностью передачи крутящего момента первому некруглому зубчатому колесу во время вертикальной наводки орудийного ствола.
Согласно второму объекту изобретения создан способ, выполняемый устройством управления для балансировки орудийного ствола системы вооружения, установленной на транспортное средство, причем система вооружения содержит орудийный ствол, установленный на башню посредством орудийного лафета, при этом орудийный лафет выполнен с возможностью обеспечения вертикальной наводки орудийного ствола относительно оси вертикальной наводки, причем способ включает обеспечение крутящего момента, препятствующего нарушению баланса орудийного ствола посредством системы подвески, а также этапы, на которых: автоматически регулируют крутящий момент, обеспечиваемый системой подвески, на основе нарушения баланса орудийного ствола, чтобы динамически противодействовать нарушению баланса орудийного ствола; при этом система подвески содержит торсионный стержень, имеющий первый концевой участок, выполненный с возможностью неподвижного прикрепления к башне, и второй концевой участок, выполненный с возможностью присоединения к орудийному лафету, чтобы обеспечивать упомянутый крутящий момент.
Предпочтительно, определяют текущее нарушение баланса орудийного ствола; и обеспечивают упомянутую автоматическую регулировку посредством блока актуатора на основе данных от датчиков из определенного, таким образом, нарушения баланса орудийного ствола.
Предпочтительно, при определении текущего нарушения баланса орудийного ствола осуществляют один или более этапов, на которых: определяют усилие, требуемое приводной конструкцией для приведения в действие орудийного лафета; обнаруживают текущую вертикальную наводку орудийного ствола; обнаруживают текущие наклоны относительно продольной и поперечной осей транспортного средства; и определяют текущий вес орудийного ствола.
Согласно третьему объекту создано транспортное средство, содержащее вышеописанную конструкцию для балансировки орудийного ствола системы вооружения, установленной на транспортное средство.
Предпочтительно, транспортное средство является гусеничным транспортным средством.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения ссылка выполняется на последующее подробное описание при прочтении вместе с сопровождающими чертежами, на которых аналогичными ссылочными позициями обозначены аналогичные компоненты на всех видах, и на которых:
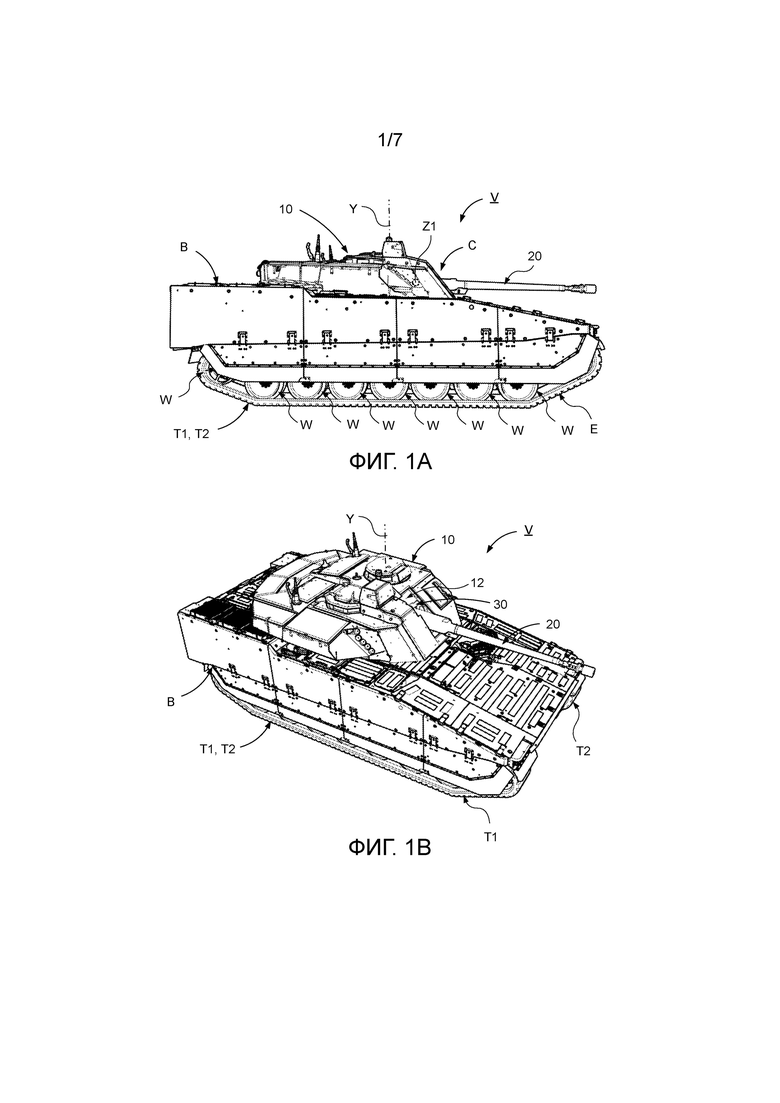
Фиг. 1a схематично иллюстрирует вид сбоку гусеничного транспортного средства согласно варианту осуществления настоящего изобретения;
Фиг. 1b схематично иллюстрирует вид в перспективе гусеничного транспортного средства с фиг. 1 с системой подвески согласно варианту осуществления настоящего изобретения;
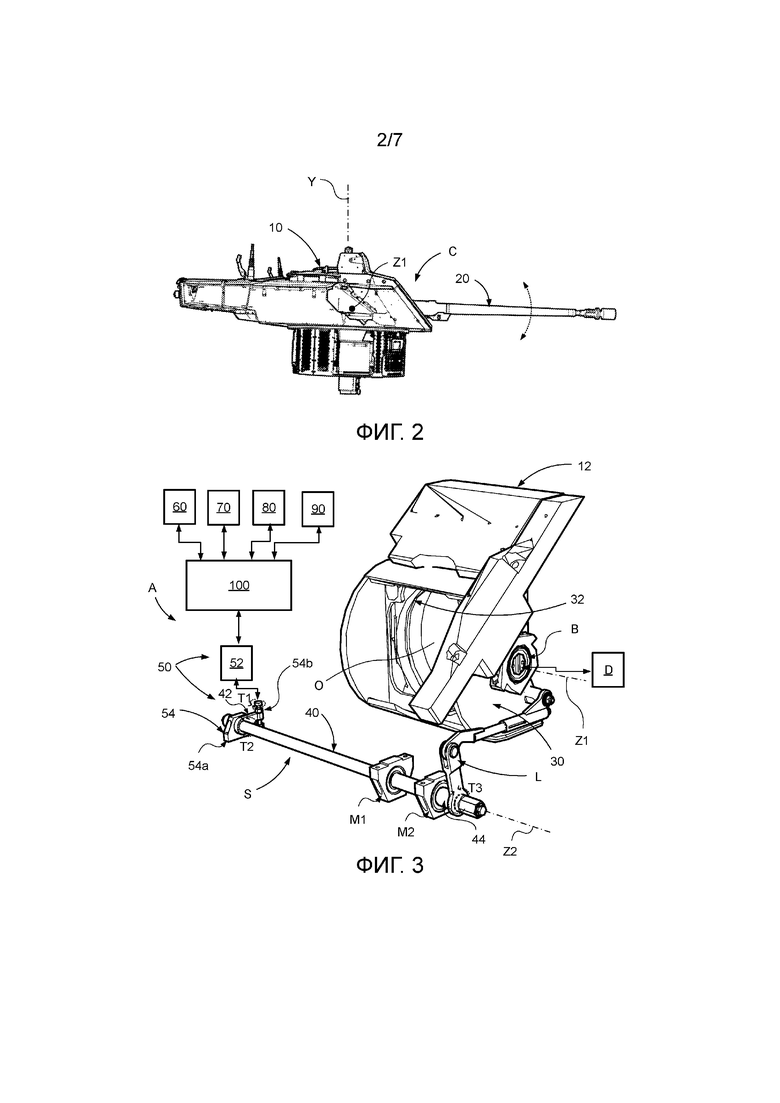
Фиг. 2 схематично иллюстрирует вид сбоку башни с системой вооружения, имеющей орудийный ствол согласно варианту осуществления настоящего изобретения;
Фиг. 3 схематично иллюстрирует вид в перспективе орудийного лафета, оснащенного конструкцией для балансировки орудийного ствола системы вооружения, установленной на транспортное средство, согласно варианту осуществления настоящего изобретения;
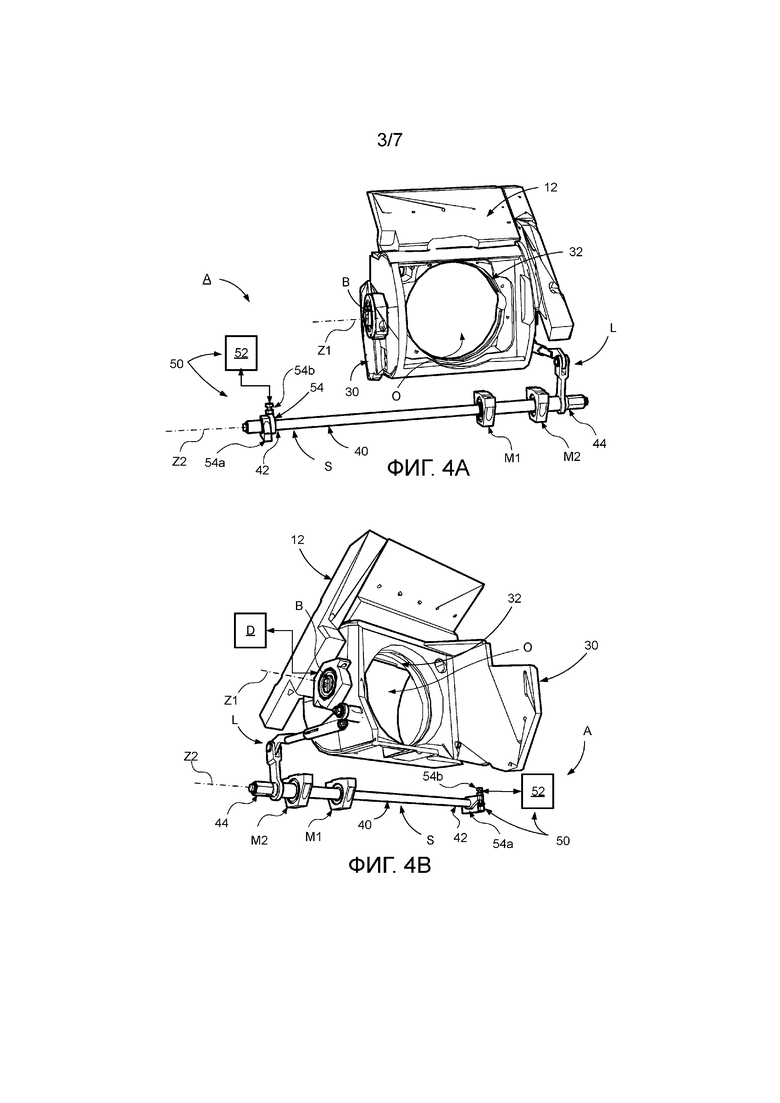
Фиг. 4a схематично иллюстрирует передний вид в перспективе орудийного лафета и конструкции с фиг. 3;
Фиг. 4b схематично иллюстрирует задний вид в перспективе с нижней стороны орудийного лафета и конструкции с фиг. 3;
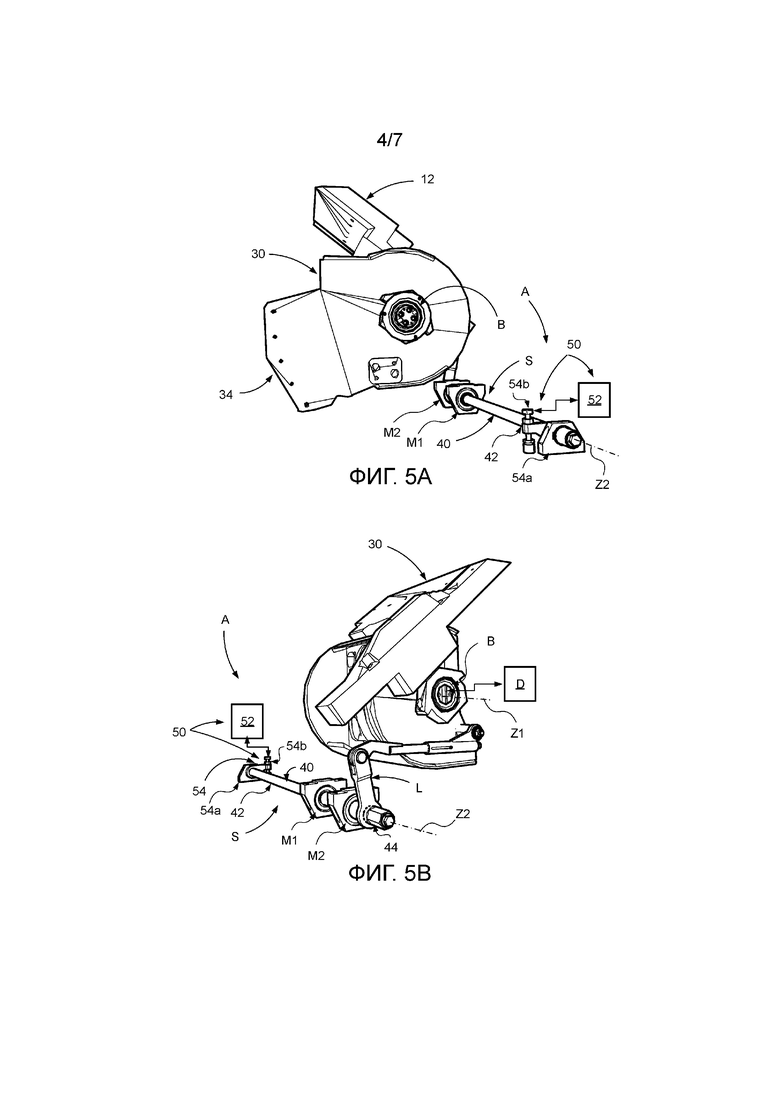
Фиг. 5a схематично иллюстрирует боковой вид в перспективе орудийного лафета и конструкции с фиг. 3;
Фиг. 5b схематично иллюстрирует боковой вид в перспективе орудийного лафета и конструкции с фиг. 3;
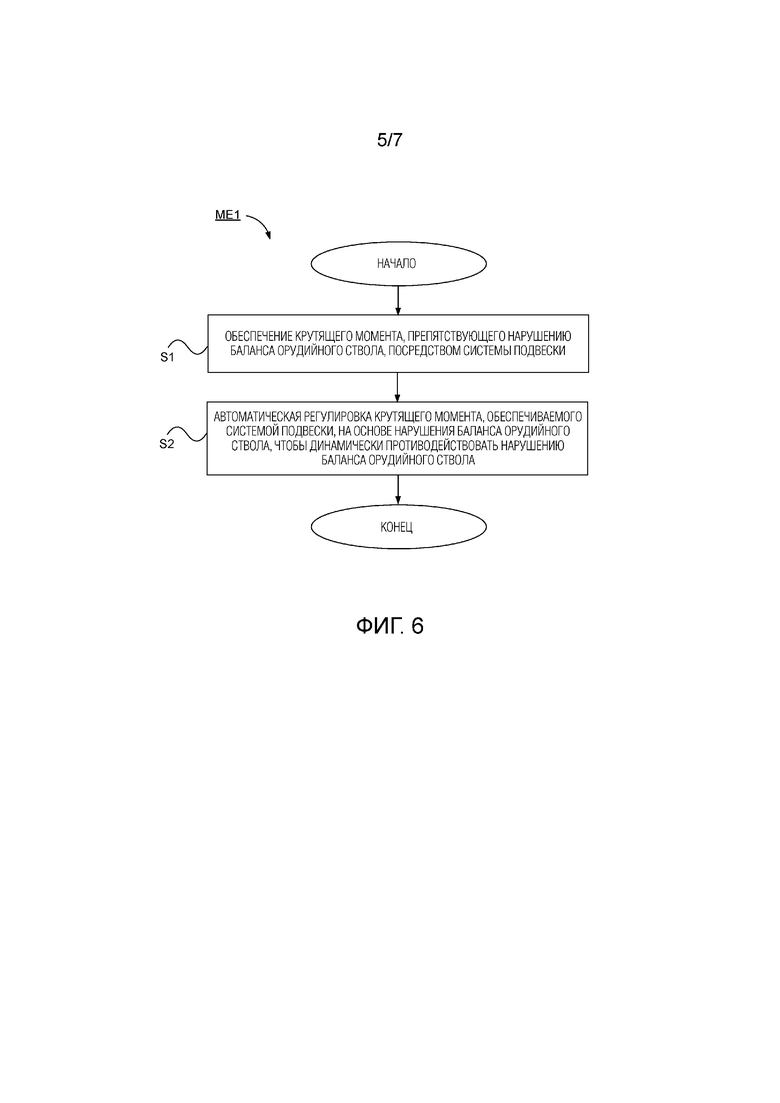
Фиг. 6 схематично иллюстрирует блок-схему последовательности операций способа, выполняемого посредством устройства управления для балансировки орудийного ствола согласно варианту осуществления настоящего изобретения;
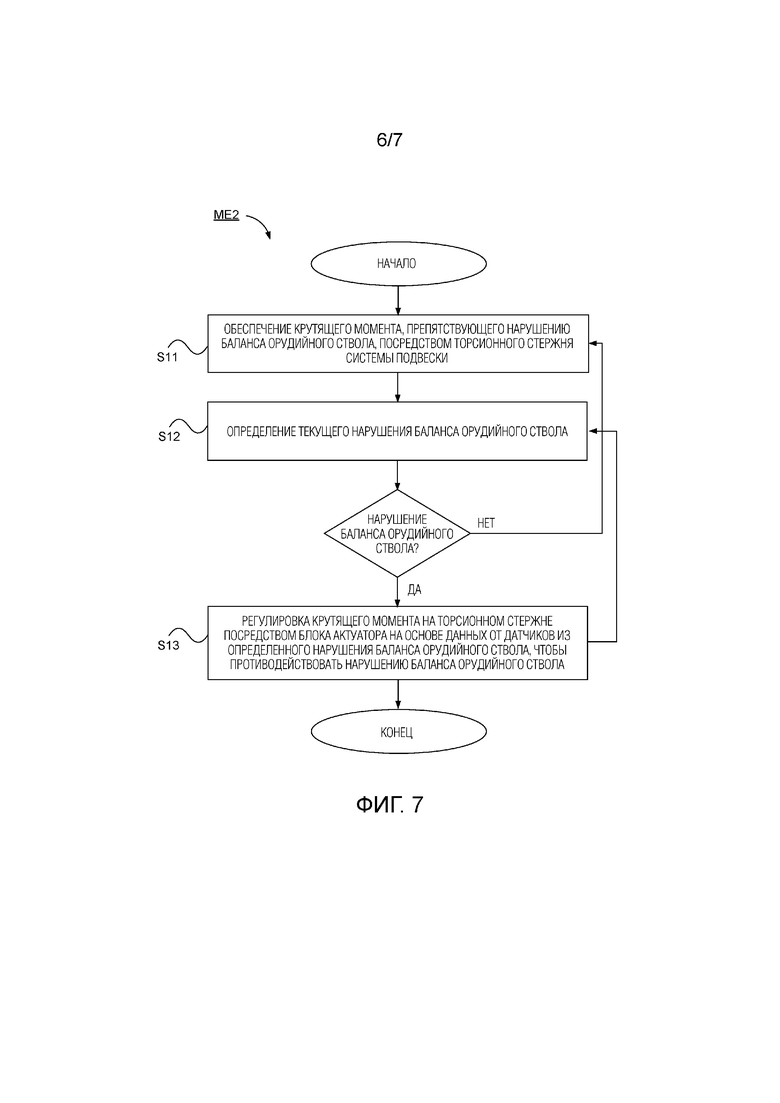
Фиг. 7 схематично иллюстрирует блок-схему последовательности операций способа, выполняемого посредством устройства управления для балансировки орудийного ствола согласно варианту осуществления настоящего изобретения;
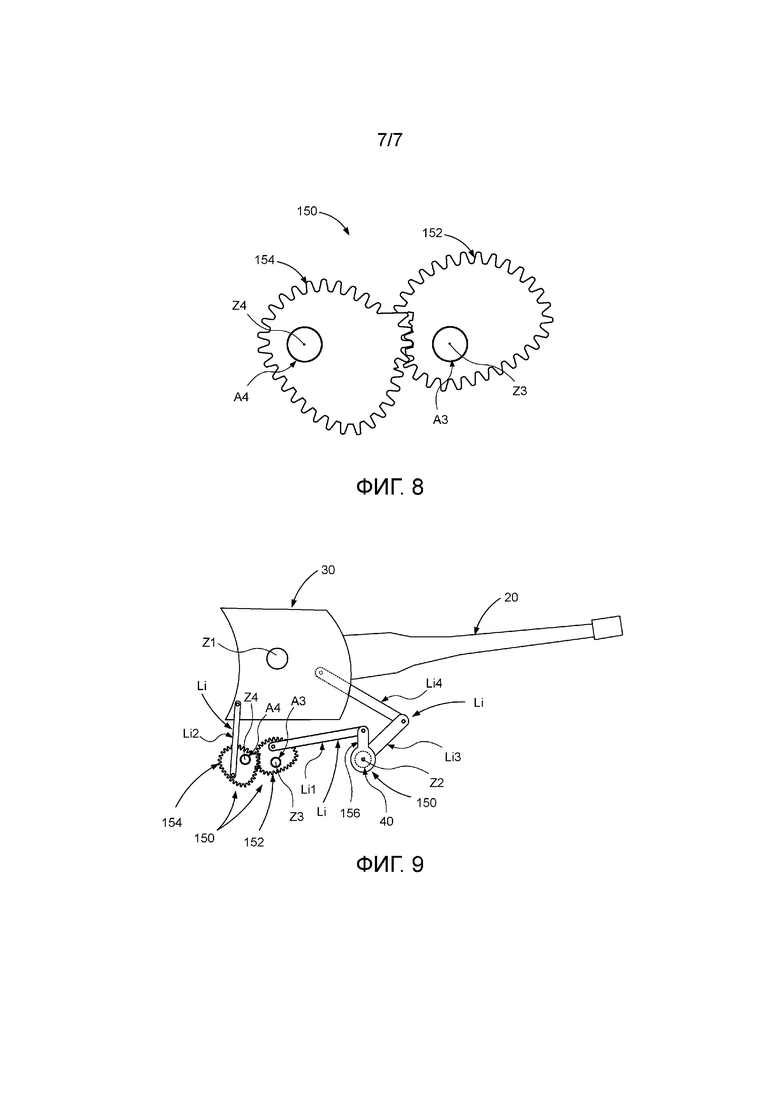
Фиг. 8 схематично иллюстрирует последовательную рычажную конфигурацию согласно варианту осуществления настоящего изобретения; и
Фиг. 9 схематично иллюстрирует последовательную рычажную конфигурацию с фиг. 8, размещенную в соединении с орудийным лафетом согласно варианту осуществления настоящего изобретения.
Подробное описание изобретения
В данном документе термин «линия связи» ссылается на линию связи, которая может быть физическим разъемом, таким как оптоэлектронный провод для связи, или нефизическим разъемом, таким как беспроводное соединение, например, линия радиосвязи или микроволновая линия связи.
При этом термин «блок актуатора» ссылается на любой блок, подходящий для предоставления автоматической регулировки крутящего момента, обеспечиваемого системой подвески, например, содержащей торсионный стержень, на основе данных датчиков, указывающих текущее нарушение баланса орудийного ствола системы вооружения, установленной на транспортном средстве. Термин «блок актуатора» может, таким образом, ссылаться на любой подходящий блок актуатора для обеспечения регулировки крутящего момента, обеспечиваемого торсионным стержнем системы подвески на основе данных датчиков, указывающих текущее нарушение баланса такого орудийного ствола. Термин «блок актуатора» может, например, содержать электрический актуатор, например, электромотор, сервомотор, шаговый мотор или т.п. Термин «блок актуатора» может ссылаться на любое подходящее устройство, т.е. блок актуатора, который является функционально соединяемым с устройством управления, и который является управляемым посредством упомянутого устройства управления, чтобы обеспечивать регулировку крутящего момента, обеспечиваемого системой подвески, например, содержащей торсионный стержень. Устройство управления может быть сконфигурировано, чтобы принимать и обрабатывать данные датчиков, указывающие текущее нарушение баланса орудийного ствола системы вооружения, устанавливаемой на транспортное средство.
При этом термин «динамически» в соединении с «динамическим противодействием нарушению баланса орудийного ствола» ссылается на противодействие нарушению баланса орудийного ствола, активно получаемое вследствие регулировки крутящего момента, обеспечиваемого системой подвески, т.е. регулировки крутящего момента торсионного стержня системы подвески, на основе нарушения баланса орудийного ствола. Регулировка крутящего момента, обеспечиваемого системой подвески, т.е. регулировка крутящего момента на торсионном стержне системы подвески, на основе нарушения баланса орудийного ствола может, таким образом, ссылаться на динамическую регулировку крутящего момента, как противоположность наличию статического крутящего момента, заданного на системе подвески, например, торсионного стержня.
При этом термин «автоматическая регулировка» в соединении с «автоматической регулировкой крутящего момента, обеспечиваемого системой подвески на основе нарушения баланса орудийного ствола», может ссылаться на регулировку, выполняемую посредством регулирующего устройства, когда существует нарушение баланса. Согласно аспекту такое регулирующее устройство содержит блок актуатора, который конфигурируется, чтобы выполнять такую автоматическую регулировку на основе данных датчиков о текущем нарушении баланса орудийного ствола. Автоматическая регулировка может быть получена механически посредством регулирующего устройства, содержащего рычажную конфигурацию.
Фиг. 1a схематично иллюстрирует вид сбоку гусеничного транспортного средства V согласно аспекту настоящего изобретения, а фиг. 1b схематично иллюстрирует вид в перспективе транспортного средства V на фиг. 1a. Приводимое в пример транспортное средство 1 состоит из боевого транспортного средства. Гусеничное транспортное средство V содержит кузов B транспортного средства, который согласно аспекту настоящего изобретения содержит шасси транспортного средства V и конструкцию кузова.
Гусеничное транспортное средство V содержит пару T1, T2 гусеничных узлов, подвешенным образом присоединенных к кузову B транспортного средства. Пара гусеничных узлов содержит правый гусеничный узел T1 и левый гусеничный узел T2 для привода транспортного средства, каждый гусеничный узел содержит приводимую приводящим средством гусеничную ленту E, выполненную с возможностью проходить поверх множества колес W гусеничного узла.
Даже если иллюстрированное моторное транспортное средство 1 является гусеничным транспортным средством, моторное транспортное средство 1 может согласно другим вариантам осуществления изобретения состоять из колесного транспортного средства.
Транспортное средство V оснащено башней 10. Башня 10 размещается на верхней стороне транспортного средства V. Башня 10 является поворачиваемой вокруг оси Y вращения, ортогональной продольной протяженности транспортного средства V и ортогональной поперечной протяженности транспортного средства V.
Транспортное средство V конфигурируется, чтобы быть оборудованным системой C вооружения, имеющей орудийный ствол 20. Орудийный ствол 20 устанавливается на башню 10. Орудийному стволу 20 системы C вооружения, таким образом, предоставляется возможность поворачиваться посредством вращения башни 10 вокруг оси Y.
Орудийный ствол 20 конфигурируется, чтобы соединяться с орудийным лафетом 30, соединенным с башней 10, участок орудийного лафета 30 является видимым на фиг. 1b. Орудийный лафет может быть орудийным лафетом 30, иллюстрированным на фиг. 3, 4a-b, 5a-b и фиг. 9. Орудийный ствол 20 конфигурируется, чтобы подниматься и опускаться, т.е. обеспечивать вертикальную наводку, относительно оси Z1 вертикальной наводки, иллюстрированной на фиг. 1a, посредством орудийного лафета.
Орудийный лафет 30 конфигурируется, чтобы соединяться с несущим опорным элементом 12 башни 10 таким образом, чтобы обеспечивать упомянутую вертикальную наводку посредством орудийного лафета 30. Несущий опорный элемент 12 может быть несущим опорным элементом 12, иллюстрированным на фиг. 3, 4a-b и 5a-b.
Фиг. 2 схематично иллюстрирует вид сбоку башни 10 с системой C вооружения, имеющей орудийный ствол 20 согласно варианту осуществления настоящего изобретения.
Как упомянуто выше со ссылкой на фиг. 1a-b, орудийный ствол 20 конфигурируется, чтобы соединяться с орудийным лафетом, например, орудийным лафетом 30, иллюстрированным на фиг. 3, 4a-b и 5a-b. Орудийный ствол 20 конфигурируется, чтобы подниматься и опускаться, т.е. обеспечивать вертикальную наводку, относительно оси Z1 вертикальной наводки посредством орудийного лафета.
Фиг. 3 схематично иллюстрирует вид в перспективе орудийного лафета 30, оснащенного конструкцией A для балансировки орудийного ствола системы вооружения, установленной на транспортное средство, согласно варианту осуществления настоящего изобретения; а фиг. 4a-b и 5a-b схематично иллюстрируют различные виды в перспективе орудийного ствола и конструкции на фиг. 3.
Орудийный лафет 30 выполняется с возможностью позволять вертикальную наводку орудийного ствола, например, орудийного ствола, как описано со ссылкой на фиг. 1a-b и фиг. 2. Орудийный лафет 30 выполняется с возможностью позволять вертикальную наводку орудийного ствола относительно оси Z1 вертикальной наводки.
Орудийный лафет 30 согласно аспекту настоящего изобретения конфигурируется, чтобы прикрепляться к башне 10, и, таким образом, конфигурируется, чтобы вращаться вместе с башней вокруг оси Y, как иллюстрировано на фиг. 1a-b и фиг. 2.
Орудийный лафет 30 содержит кольцеобразный опорный элемент 32 для поддержки орудийного ствола. Кольцеобразный опорный элемент 32 имеет отверстие O, через которое орудийный ствол, как предполагается, должен быть размещен. Отверстие O кольцеобразного опорного элемента 32 имеет протяженность, соответствующую протяженности орудийного ствола, когда установлен в кольцеобразный опорный элемент 32. Ось Z1 вертикальной наводки размещается в соединении с кольцеобразным опорным элементом 32. Ось Z1 наводки является ортогональной осевой протяженности отверстия O и, следовательно, осевой протяженности орудийного ствола.
Орудийный лафет 30 с кольцеобразным опорным элементом 32 с отверстием O конфигурируется, чтобы опираться на подшипники B для обеспечения вращения орудийного лафета 30 вокруг оси Z1 для вертикальной наводки орудийного ствола, когда поддерживается посредством орудийного лафета 30.
Орудийный лафет 30, таким образом, конфигурируется, чтобы соединяться с башней через упомянутые подшипники B таким образом, чтобы обеспечивать вращение орудийного лафета 30 относительно башни, т.е. вокруг оси Z1. Орудийный лафет 30 конфигурируется, чтобы соединяться с несущим опорным элементом 12 башни через упомянутые подшипники B таким образом, чтобы обеспечивать вращение орудийного лафета 30 относительно башни, т.е. вокруг оси Z1.
Орудийный лафет 30 содержит или функционально соединяется с приводной конструкцией D для приведения в действие орудийного лафета 30. Приводная конструкция D для приведения в действие орудийного лафета 30 конфигурируется, чтобы перемещать орудийный ствол вокруг оси Z1 вертикальной наводки Приводная конструкция D для приведения в действие орудийного лафета 30, таким образом, конфигурируется, чтобы поднимать или опускать орудийный ствол вокруг оси Z1 вертикальной наводки. Приводная конструкция D для приведения в действие орудийного лафета 30, таким образом, конфигурируется, чтобы обеспечивать вращательное движение орудийного ствола 30 вокруг оси Z1 вертикальной наводки. Приводная конструкция D может быть любой подходящей приводной конструкцией. Приводная конструкция D согласно аспекту настоящего изобретения является электромотором, например, сервомотором. Приводная конструкция D может быть неподвижно размещена на башне. Приводная конструкция D может быть сконфигурирована, чтобы передавать мощность через сегмент ведущего колеса орудийного лафета 30 для приведения в действие орудийного лафета 30, т.е. перемещения орудийного лафета 30 вокруг оси Z1. Такой сегмент ведущего колеса, не показан, может быть размещен на боковом участке 34, показанном на фиг. 5a. Такой сегмент ведущего колеса, не показан, размещенный на боковом участке 34, показанном на фиг. 5a, может иметь дугообразную конфигурацию, чтобы обеспечивать перемещение орудийного лафета 30 вокруг оси Z.
Орудийный лафет 30, таким образом, оснащается конструкцией A для балансировки орудийного ствола во время эксплуатации транспортного средства, когда требуется. Орудийный лафет 30 может содержать или быть функционально соединен с конструкцией A для балансировки орудийного ствола.
Упомянутая конструкция A содержит систему S подвески, сконфигурированную, чтобы предоставлять крутящий момент, препятствующий нарушению баланса орудийного ствола. Согласно аспекту настоящего изобретения, иллюстрированному, например, на фиг. 3, система S подвески содержит торсионный стержень 40. Торсионный стержень 40 имеет первый концевой участок 42, сконфигурированный, чтобы неподвижно прикрепляться к башне, и второй концевой участок 44, сконфигурированный, чтобы присоединяться к орудийному лафету 30, чтобы предоставлять упомянутый крутящий момент. Торсионный стержень 40, таким образом, согласно аспекту настоящего изобретения конфигурируется, чтобы предоставлять крутящий момент, препятствующий нарушению баланса орудийного ствола. Торсионный стержень 40 согласно аспекту настоящего изобретения конфигурируется предварительно натянутым, чтобы препятствовать нарушению баланса орудийного ствола. Торсионный стержень 40 согласно аспекту настоящего изобретения конфигурируется предварительно натянутым, чтобы предоставлять упомянутый крутящий момент, препятствующий нарушению баланса орудийного ствола.
Торсионный стержень 40 конфигурируется, чтобы соединяться с орудийным лафетом 30 на своем втором концевом участке 44 через соединительную конструкцию L. Соединительная конструкция L соединяется на первом конце с торсионным стержнем 40 в соединении со вторым концевым участком 44 и на втором конце с осью Z1 в соединении с подшипниками B на левой стороне орудийного лафета 30. Соединительная конструкция L согласно варианту осуществления конфигурируется, чтобы предоставлять функцию некого рычага, чтобы балансировать орудийный лафет 30.
Торсионный стержень 40 конфигурируется, чтобы поддерживаться парой опорных элементов M1, M2. Пара опорных элементов M1, M2 содержит первый опорный элемент M1, размещенный вокруг торсионного стержня 40 между первым концевым участком 42 и вторым концевым участком 44. Пара опорных элементов M1, M2 содержит второй опорный элемент M2, размещенный вокруг торсионного стержня 40 между первым опорным элементом M1 и вторым концевым участком 44 на расстоянии от первого опорного элемента M1. Пара опорных элементов M1, M2 конфигурируются, чтобы неподвижно прикрепляться к башне. Пара опорных элементов M1, M2 конфигурируются для опоры на подшипниках вокруг торсионного стержня 40 для обеспечения вращения торсионного стержня 40 относительно пары опорных элементов M1, M2 вокруг оси Z2. Торсионный стержень 40 может опираться и поддерживаться посредством любого подходящего опорного элемента, такого как единственный вытянутый элемент, сконфигурированный, чтобы поддерживать и осуществлять опору на подшипниках вокруг торсионного стержня 40.
Конструкция A дополнительно содержит регулирующее устройство 50 для автоматической регулировки крутящего момента, обеспечиваемого системой S подвески, на основе нарушения баланса орудийного ствола 20, чтобы динамически противодействовать нарушению баланса орудийного ствола. Регулирующее устройство 50 согласно аспекту настоящего изобретения конфигурируется для автоматической регулировки предварительного натяжения, обеспечиваемого посредством системы S подвески, на основе нарушения баланса орудийного ствола 20, чтобы динамически противодействовать нарушению баланса орудийного ствола.
Регулирующее устройство 50 конфигурируется, чтобы обеспечивать упомянутую автоматическую регулировку крутящего момента, обеспечиваемого торсионным стержнем 40 системы S подвески, на основе нарушения баланса орудийного ствола 20, чтобы динамически противодействовать нарушению баланса орудийного ствола. Регулирующее устройство 50 согласно аспекту настоящего изобретения конфигурируется для автоматической регулировки предварительного натяжения, обеспечиваемого посредством торсионного стержня 40, на основе нарушения баланса орудийного ствола 20, чтобы динамически противодействовать нарушению баланса орудийного ствола.
Регулирующее устройство 50 содержит блок 52 актуатора, сконфигурированный для предоставления упомянутой автоматической регулировки крутящего момента, обеспечиваемого системой S подвески, на основе данных датчиков, указывающих текущее нарушение баланса орудийного ствола. Блок 52 актуатора конфигурируется для обеспечения упомянутой автоматической регулировки крутящего момента, обеспечиваемого торсионным стержнем 40 системы S подвески, на основе данных датчиков, указывающих текущее нарушение баланса орудийного ствола. Блок 52 актуатора может быть любым подходящим блоком актуатора для обеспечения регулировки крутящего момента, обеспечиваемого торсионным стержнем 40. Блок 52 актуатора может согласно аспекту настоящего изобретения быть электрическим актуатором, например, электромотором, сервомотором, шаговым мотором или т.п. Блок 52 актуатора может согласно аспекту настоящего изобретения быть сервомотором. Блок 52 актуатора может согласно аспекту настоящего изобретения быть шаговым мотором.
Блок 52 актуатора может быть сконфигурирован, чтобы обеспечивать регулировку крутящего момента, обеспечиваемого торсионным стержнем 40, любым подходящим способом. Согласно аспекту настоящего изобретения блок 52 актуатора конфигурируется, чтобы обеспечивать регулировку крутящего момента, обеспечиваемого торсионным стержнем 40, посредством устройства 54 регулировки крутящего момента, размещенного в соединении с торсионным стержнем 40.
Устройство 54 регулировки крутящего момента содержит согласно аспекту настоящего изобретения элемент 54a поддержки торсионного стержня, размещенный вокруг торсионного стержня 40 в соединении с первым концевым участком 42. Элемент 54a поддержки торсионного стержня конфигурируется для неподвижного присоединения к башне. Первый концевой участок 42 торсионного стержня 40 конфигурируется, чтобы прикрепляться к башне посредством опорного элемента 54a. Элемент 54a поддержки торсионного стержня размещается с возможностью регулировки крутящего момента вокруг торсионного стержня 40, чтобы предоставлять регулируемый крутящий момент торсионного стержня 40. Элемент 54a поддержки торсионного стержня размещается с возможностью регулировки крутящего момента вокруг торсионного стержня 40 в соединении с первым концевым участком 42, чтобы предоставлять регулируемый крутящий момент торсионного стержня 40. Элемент 54a поддержки торсионного стержня размещается вокруг торсионного стержня 40 в соединении с первым концевым участком 42, чтобы обеспечивать предварительное натяжение торсионного стержня 40. Элемент 54a поддержки торсионного стержня размещается вокруг торсионного стержня 40 в соединении с первым концевым участком 42, чтобы обеспечивать предварительное натяжение торсионного стержня 40.
Устройство 54 регулировки крутящего момента содержит согласно аспекту настоящего изобретения элемент 54b регулировки крутящего момента для регулировки крутящего момента торсионного стержня 40, обеспечиваемого опорным элементом 54a. Элемент 54b регулировки крутящего момента согласно аспекту настоящего изобретения является винтовым соединительным элементом 54b, прикрепленным к опорному элементу 54a, чтобы обеспечивать регулировку крутящего момента торсионного стержня посредством завинчивания или отвинчивания окружающего торсионный стержень опорного элемента 54a. Элемент 54b регулировки крутящего момента согласно аспекту настоящего изобретения конфигурируется, чтобы регулировать предварительное натяжение торсионного стержня 40.
Элемент 54b регулировки крутящего момента в форме винтового соединительного элемента 54b может, таким образом, предоставлять крутящий момент посредством завинчивания или отвинчивания окружающего торсионный стержень опорного элемента 54a, крутящий момент, обеспечиваемый винтовым соединительным элементом 54b, иллюстрируется на фиг. 3 с помощью стрелки T1.
Элемент 54b регулировки крутящего момента в форме винтового соединительного элемента 54b может, таким образом, регулировать крутящий момент торсионного стержня 40 в соединении с первым концевым участком 42 посредством завинчивания или отвинчивания окружающего торсионный стержень опорного элемента 54a, крутящий момент торсионного стержня 40 в первом концевом участке 42 иллюстрируется на фиг. 3 с помощью стрелки T2.
Элемент 54b регулировки крутящего момента в форме винтового соединительного элемента 54b может, таким образом, регулировать крутящий момент, предоставленный торсионным стержнем 40, посредством завинчивания или отвинчивания окружающего торсионный стержень опорного элемента 54a, крутящий момент торсионного стержня 40 в соединении со вторым концевым участком 44, противодействующий нарушению баланса орудийного ствола, иллюстрируется на фиг. 3 с помощью стрелки T3.
Блок 52 актуатора согласно аспекту изобретения соединяется с элементом 54b регулировки крутящего момента для автоматической регулировки крутящего момента, предоставленного системой подвески, на основе нарушения баланса орудийного ствола, чтобы динамически противодействовать нарушению баланса орудийного ствола.
Блок 52 актуатора согласно аспекту изобретения соединяется с элементом 54b регулировки крутящего момента для автоматической регулировки крутящего момента, предоставленного торсионным стержнем 40, на основе нарушения баланса орудийного ствола, чтобы динамически противодействовать нарушению баланса орудийного ствола.
Система S подвески содержит торсионный стержень 40, имеющий первый концевой участок 42, сконфигурированный, чтобы неподвижно прикрепляться к башне, и второй концевой участок, сконфигурированный, чтобы присоединяться к орудийному лафету 30, чтобы предоставлять упомянутый крутящий момент.
Согласно аспекту настоящего изобретения конструкция A для балансировки орудийного ствола 20 системы вооружения, установленной на транспортное средство, конфигурируется для управления посредством устройства 100 управления, см. фиг. 3. Конструкция A может содержать или быть функционально соединена с устройством 100 управления.
Устройство 100 управления согласно аспекту конфигурируется для управления конструкцией A.
Устройство 100 управления для управления конструкцией A для балансировки орудийного ствола 20 системы вооружения, установленной на транспортное средство, может содержаться в конструкции A.
Устройство 100 управления может быть реализовано как отдельный объект или распределено в двух или более физических объектах. Устройство 100 управления может содержать один или более компьютеров. Устройство 100 управления может, таким образом, быть осуществлено или реализовано посредством устройства управления, содержащего процессор и память, память содержит инструкции, которые, когда исполняются процессором, инструктируют устройству управления выполнять раскрытый в данном документе способ.
Устройство 100 управления может содержать один или более электронных блоков управления, процессоров, компьютеров, серверных блоков или т.п. для управления охлаждением конструкции A для балансировки орудийного ствола 20 транспортного средства. Устройство 100 управления может содержать устройство управления, такое как один или более электронных блоков управления, размещенных на борту транспортного средства. Устройство 100 управления может содержать один или более электронных блоков управления транспортного средства. Устройство 100 управления может содержать один или более электронных блоков управления, процессоров, компьютеров, серверных блоков или т.п. внешней системы, размещенной внешне по отношению к транспортному средству и функционально соединяемой с транспортным средством.
Устройство 100 управления может согласно аспекту настоящего изобретения функционально соединяться с блоком 52 актуатора. Устройство 100 управления может согласно аспекту настоящего изобретения быть функционально соединено с блоком 52 актуатора через одну или более линий связи.
Устройство 100 управления может согласно аспекту настоящего изобретения быть выполнено с возможностью принимать данные датчиков, указывающие текущее нарушение баланса орудийного ствола.
Устройство 100 управления может согласно аспекту настоящего изобретения быть сконфигурировано для управления блоком 52 актуатора на основе принятых, таким образом, данных датчиков, указывающих текущее нарушение баланса орудийного ствола,, чтобы регулировать крутящий момент, обеспечиваемый системой S подвески, т.е. торсионного стержня 40 системы S подвески,, чтобы динамически противодействовать нарушению баланса орудийного ствола 20.
Устройство 100 управления согласно аспекту настоящего изобретения конфигурируется, чтобы определять усилие, требуемое приводной конструкцией для приведения в действие орудийного лафета.
Конструкция A может содержать или быть функционально соединена с устройством 60 определения потребности в усилии приводной конструкции для определения усилия, требуемого приводной конструкцией D для приведения в действие орудийного лафета 30. Устройство 60 определения потребности в усилии приводной конструкции может содержать один или более детекторов для обнаружения требуемого усилия для приведения в действие орудийного лафета 30. Упомянутый один или более детекторов для обнаружения требуемого усилия для приведения в действие орудийного лафета 30 могут содержать детектор потребляемой силы тока для обнаружения силы тока, потребляемого приводной конструкцией D, например, приводным мотором вертикальной наводки. Упомянутые один или более детекторов для обнаружения требуемого усилия для приведения в действие орудийного лафета 30 могут содержать акселерометр.
Согласно аспекту настоящего изобретения устройство 100 управления, через линию связи, функционально соединяется с устройством 60 определения потребности в усилии приводной конструкции. Согласно аспекту настоящего изобретения устройство 100 управления, через линию связи, выполняется с возможностью принимать сигналы от устройства 60, представляющие данные датчиков об усилии, требуемом приводной конструкцией для приведения в действие орудийного лафета. Устройство 100 управления согласно аспекту настоящего изобретения конфигурируется, чтобы обрабатывать данные датчиков об усилии, требуемом приводной конструкцией для приведения в действие орудийного лафета, чтобы оценивать текущее нарушение баланса орудийного ствола.
Конструкция A может содержать или быть функционально соединен с устройством 70 определения вертикальной наводки орудийного ствола для определения текущей вертикальной наводки орудийного ствола. Устройство 70 определения вертикальной наводки орудийного ствола может содержать один или более детекторов для обнаружения текущей вертикальной наводки орудийного ствола. Упомянутый один или более детекторов для обнаружения текущей вертикальной наводки орудийного ствола могут содержать датчик наклона и/или датчик угла и/или инерциальный датчик и/или гироскоп и/или кодер. Упомянутые один или более детекторов для обнаружения текущей вертикальной наводки орудийного ствола могут содержать акселерометр.
Согласно аспекту настоящего изобретения устройство 100 управления, через линию связи, функционально соединяется с устройством 70 определения вертикальной наводки орудийного ствола. Согласно аспекту настоящего изобретения устройство 100 управления, через линию связи, выполняется с возможностью принимать сигналы от устройства 70 определения вертикальной наводки орудийного ствола, представляющие данные датчиков для текущей вертикальной наводки орудийного ствола. Устройство 100 управления согласно аспекту настоящего изобретения конфигурируется, чтобы обрабатывать данные датчиков для текущей вертикальной наводки орудийного ствола, чтобы оценивать текущее нарушение баланса орудийного ствола.
Конструкция A может содержать или быть функционально соединена с устройством 80 определения наклона относительно продольной и поперечной осей для определения текущего наклона относительно продольной и поперечной осей транспортного средства. Устройство 80 определения наклона относительно продольной и поперечной осей может содержать один или более детекторов для обнаружения текущего наклона относительно продольной и поперечной осей транспортного средства. Упомянутый один или более детекторов для обнаружения текущего наклона относительно продольной и поперечной осей транспортного средства могут содержать датчик угла и/или инерциальный датчик и/или гироскоп и/или кодер. Упомянутый один или более детекторов для обнаружения текущего наклона относительно продольной и поперечной осей транспортного средства может содержать акселерометр.
Согласно аспекту настоящего изобретения устройство 100 управления, через линию связи, функционально соединяется с устройством 80 определения наклона относительно продольной и поперечной осей. Согласно аспекту настоящего изобретения устройство 100 управления, через линию связи, выполняется с возможностью принимать сигналы от устройства 80 определения наклона относительно продольной и поперечной осей, представляющие данные датчиков для текущего наклона относительно продольной и поперечной осей транспортного средства. Устройство 100 управления согласно аспекту настоящего изобретения конфигурируется, чтобы обрабатывать данные датчиков для текущего угла наклона относительно продольной и поперечной осей транспортного средства, чтобы оценивать текущее нарушение баланса орудийного ствола.
Конструкция A может содержать или быть функционально соединена с устройством 90 определения веса орудийного ствола для определения текущего веса орудийного ствола. Устройство 90 определения веса орудийного ствола может содержать один или более детекторов веса для обнаружения текущего веса орудийного ствола. Устройство 90 определения веса орудийного ствола может содержать устройство подсчета боеприпасов для подсчета текущих боеприпасов для орудийного ствола.
Согласно аспекту настоящего изобретения устройство 100 управления, через линию связи, функционально соединяется с устройством 90 определения веса орудийного ствола. Согласно аспекту настоящего изобретения устройство 100 управления, через линию связи, выполняется с возможностью принимать сигналы от устройства 90 определения веса орудийного ствола, представляющие данные датчиков для текущего веса орудийного ствола. Устройство 100 управления согласно аспекту настоящего изобретения конфигурируется, чтобы обрабатывать данные датчиков для веса орудийного ствола, чтобы оценивать текущее нарушение баланса орудийного ствола.
Устройство 100 управления может, таким образом, согласно аспекту настоящего изобретения быть сконфигурировано, чтобы обрабатывать данные датчиков об усилии, требуемом приводной конструкцией для приведения в действие орудийного лафета, от устройства 60 определения потребности в усилии и/или обрабатывать данные датчиков о текущей вертикальной наводке орудийного ствола от устройства 70 определения вертикальной наводки орудийного ствола и/или обрабатывать данные датчиков о текущем наклоне относительно продольной и поперечной осей транспортного средства от устройства 80 определения наклона относительно продольной и поперечной осей и/или обрабатывать данные датчиков о весе орудийного ствола от устройства 90 определения веса орудийного ствола, чтобы оценивать данные датчиков, указывающие текущее нарушение баланса орудийного ствола.
Согласно аспекту настоящего изобретения устройство 100 управления, через линию связи, функционально соединяется с блоком 52 актуатора. Согласно аспекту настоящего изобретения устройство 100 управления, через линию связи, выполняется с возможностью отправлять сигналы блоку 52 актуатора, представляющие данные датчиков, указывающие текущее нарушение баланса орудийного ствола.
Устройство 100 управления может согласно аспекту настоящего изобретения быть сконфигурировано для управления блоком 52 актуатора на основе принятых, таким образом, данных датчиков, указывающих текущее нарушение баланса орудийного ствола,, чтобы регулировать крутящий момент, обеспечиваемый системой S подвески, т.е. торсионного стержня 40 системы S подвески,, чтобы динамически противодействовать нарушению баланса орудийного ствола 20.
Фиг. 6 и 7 схематично иллюстрируют блок-схему последовательности операций способа ME1, ME2, выполняемого устройством управления для балансировки орудийного ствола согласно аспекту настоящего изобретения. Способы могут выполняться посредством устройства управления, например, устройства 100 управления, как описано со ссылкой на фиг. 3. Способы могут быть объединены любым подходящим образом.
Фиг. 6 схематично иллюстрирует блок-схему последовательности операций способа ME1, выполняемого устройством управления для балансировки орудийного ствола системы вооружения, установленной на транспортное средство, согласно варианту осуществления настоящего изобретения.
Система вооружения содержит орудийный ствол, установленный на башню через орудийный лафет, орудийный лафет выполняется с возможностью позволять вертикальную наводку орудийного ствола вокруг оси вертикальной наводки. Система вооружения может быть любой подходящей системой вооружения, например, системой C вооружения, как описано со ссылкой на фиг. 1 и 2, и может иметь любой подходящий орудийный лафет, например, орудийный лафет, описанный со ссылкой на фиг. 3, 4a-b, 5a-b.
Согласно аспекту настоящего изобретения, способ ME1 содержит этап S1. На этом этапе крутящий момент, препятствующий нарушению баланса орудийного ствола, предоставляется посредством системы подвески.
Согласно аспекту настоящего изобретения, способ ME1 содержит этап S2. На этом этапе крутящий момент, обеспечиваемый системой подвески, автоматически регулируется на основе нарушения баланса орудийного ствола, чтобы динамически противодействовать нарушению баланса орудийного ствола.
Фиг. 7 схематично иллюстрирует блок-схему последовательности операций способа ME2, выполняемого посредством устройства управления для балансировки орудийного ствола согласно варианту осуществления настоящего изобретения.
Система вооружения содержит орудийный ствол, установленный на башню через орудийный лафет, орудийный лафет выполняется с возможностью позволять вертикальную наводку орудийного ствола вокруг оси вертикальной наводки. Система вооружения может быть любой подходящей системой вооружения, например, системой C вооружения, как описано со ссылкой на фиг. 1 и 2, и может иметь любой подходящий орудийный лафет, например, орудийный лафет, описанный со ссылкой на фиг. 3, 4a-b, 5a-b. Предоставляется система подвески, содержащая торсионный стержень, имеющий первый концевой участок, сконфигурированный, чтобы неподвижно прикрепляться к башне, и второй концевой участок, сконфигурированный, чтобы соединяться с орудийным лафетом таким образом, чтобы предоставлять крутящий момент. Торсионный стержень может быть любым подходящим торсионным стержнем, например, торсионным стержнем 40, как описано со ссылкой на фиг. 3, 4a-b, 5a-b.
Согласно аспекту настоящего изобретения, способ ME2 содержит этап S11. На этом этапе крутящий момент, препятствующий нарушению баланса орудийного ствола, предоставляется посредством торсионного стержня системы подвески.
Согласно аспекту настоящего изобретения, способ ME2 содержит этап S12. На этом этапе текущее нарушение баланса орудийного ствола определяется.
Согласно аспекту настоящего изобретения, способ содержит этап приема данных датчиков, указывающих текущее нарушение баланса орудийного ствола.
Согласно аспекту настоящего изобретения, способ содержит этап приема данных датчиков, указывающих текущее нарушение баланса орудийного ствола, содержащий прием данных об усилии, требуемом приводной конструкцией для приведения в действие орудийного лафета, и/или прием данных о текущей вертикальной наводке орудийного ствола и/или прием данных о текущем наклоне относительно продольной и поперечной осей транспортного средства и/или прием данных о текущем весе орудийного ствола. Упомянутые данные об усилии, требуемом приводной конструкцией для приведения в действие орудийного лафета, являются данными датчиков из обнаружения усилия, требуемого приводной конструкцией для приведения в действие орудийного лафета. Упомянутые данные о текущей вертикальной наводке орудийного ствола являются данными датчиков из обнаружения текущей вертикальной наводки орудийного ствола. Упомянутые данные о текущем наклоне относительно продольной и поперечной осей транспортного средства являются данными датчиков из обнаружения текущего наклона относительно продольной и поперечной осей транспортного средства. Упомянутые данные о текущем весе орудийного ствола являются данными датчиков из обнаружения текущего веса орудийного ствола.
Согласно аспекту настоящего изобретения, способ ME2 содержит этап S13. На этом этапе крутящий момент на торсионном стержне регулируется посредством актуатора на основе данных датчиков из определенного нарушения баланса орудийного ствола, чтобы динамически противодействовать нарушению баланса орудийного ствола.
Фиг. 8 схематично иллюстрирует последовательную рычажную конфигурацию 150.
Последовательная рычажная конфигурация 150 согласно аспекту настоящего изобретения конфигурируется как содержащаяся в конструкции для балансировки орудийного ствола системы вооружения, установленной на транспортное средство согласно настоящему изобретению. Система вооружения может быть системой C вооружения, как описано со ссылкой на фиг. 1a-b и фиг. 2.
Последовательная рычажная конфигурация 150 может ссылаться на рычажную конфигурацию 150, которая конфигурируется, чтобы механически обеспечивать регулировку крутящего момента, обеспечиваемого системой подвески конструкции A, на основе нарушения баланса орудийного ствола, чтобы противодействовать нарушению баланса орудийного ствола. Последовательная рычажная конфигурация 150 может ссылаться на рычажную конфигурацию 150, которая конфигурируется, чтобы механически обеспечивать регулировку крутящего момента, обеспечиваемого торсионным стержнем конструкции A, на основе нарушения баланса орудийного ствола, чтобы противодействовать нарушению баланса орудийного ствола.
Система вооружения содержит орудийный ствол, установленный на башню через орудийный лафет. Орудийный лафет может быть орудийным лафетом 30, как описано со ссылкой на фиг. 3, 4a-b и 5a-b. Орудийный лафет выполняется с возможностью позволять вертикальную наводку орудийного ствола относительно оси Z1 вертикальной наводки.
Упомянутая конструкция содержит систему подвески, сконфигурированную, чтобы предоставлять крутящий момент, препятствующий нарушению баланса орудийного ствола. Система подвески может быть системой S подвески, как описано со ссылкой на фиг. 3, 4a-b и 5a-b. Система подвески содержит торсионный стержень, имеющий первый концевой участок, сконфигурированный, чтобы неподвижно прикрепляться к башне, и второй концевой участок, сконфигурированный, чтобы соединяться с орудийным лафетом таким образом, чтобы предоставлять упомянутый крутящий момент. Торсионный стержень может быть торсионным стержнем 40, как описано со ссылкой на фиг. 3, 4a-b и 5a-b.
Конструкция содержит регулирующее устройство 150 для автоматической регулировки крутящего момента, обеспечиваемого торсионным стержнем системы подвески, на основе нарушения баланса орудийного ствола, чтобы динамически противодействовать нарушению баланса орудийного ствола.
Согласно аспекту настоящего изобретения, иллюстрированное на фиг. 8 регулирующее устройство содержит последовательную рычажную конфигурацию 152, 154, сконфигурированную для обеспечения упомянутой автоматической регулировки крутящего момента, обеспечиваемого торсионным стержнем системы подвески, на основе вертикальной наводки орудийного ствола.
Согласно аспекту настоящего изобретения последовательная рычажная конфигурация 152, 154 содержит первое некруглое зубчатое колесо 152. Первое некруглое зубчатое колесо 152 может также быть обозначено как первая некруглая зубчатая шестерня 152. Первое некруглое зубчатое колесо 152 конфигурируется, чтобы прикрепляться к торсионному стержню. Первое некруглое зубчатое колесо 152 согласно аспекту настоящего изобретения конфигурируется, чтобы присоединяться к торсионному стержню через рычажную конфигурацию, т.е. рычажную конфигурацию, которая иллюстрирована на фиг. 9. Первое некруглое зубчатое колесо 152 согласно аспекту настоящего изобретения конфигурируется для присоединения с возможностью вращения вокруг оси Z3. Первое некруглое зубчатое колесо 152 согласно аспекту настоящего изобретения конфигурируется для присоединения с возможностью вращения к неподвижной оси A3, имеющей упомянутую ось Z3 вращения, вокруг которой упомянутое первое некруглое зубчатое колесо 152 выполняется с возможностью вращаться. Ось Z3, вокруг которой упомянутое первое некруглое зубчатое колесо 152 выполняется с возможностью вращаться, согласно варианту осуществления является параллельной оси Z2 торсионного стержня.
Согласно аспекту настоящего изобретения последовательная рычажная конфигурация 152, 154 содержит второе некруглое зубчатое колесо 154. Второе некруглое зубчатое колесо 154 может также быть обозначено как вторая некруглая зубчатая шестерня 154. Второе некруглое зубчатое колесо 154 конфигурируется для прикрепления к орудийному лафету в соединении с осью Z1 вертикальной наводки. Второе некруглое зубчатое колесо 154 согласно аспекту настоящего изобретения конфигурируется, чтобы присоединяться к орудийному лафету через рычажную конфигурацию, т.е. рычажную конфигурацию, которая иллюстрирована на фиг. 9. Второе некруглое зубчатое колесо 154 согласно аспекту настоящего изобретения конфигурируется для присоединения с возможностью вращения вокруг оси Z4. Второе некруглое зубчатое колесо 154 согласно аспекту настоящего изобретения конфигурируется для присоединения с возможностью вращения к неподвижной оси A4, имеющей упомянутую ось Z4 вращения, вокруг которой упомянутое второе некруглое зубчатое колесо 154 выполняется с возможностью вращаться. Ось Z4, вокруг которой упомянутое второе некруглое зубчатое колесо 154 выполняется с возможностью вращаться, согласно варианту осуществления, является параллельной оси Z1 вертикальной наводки орудийного лафета.
Второе некруглое зубчатое колесо 154 конфигурируется, чтобы передавать крутящий момент первому некруглому зубчатому колесу 152 во время вертикальной наводки орудийного ствола. Рассмотрим фиг. 9, схематично иллюстрирующую примерный вариант осуществления.
Фиг. 9 схематично иллюстрирует последовательную рычажную конфигурацию 152, 154 на фиг. 8, размещенную в соединении с орудийным лафетом 30 согласно варианту осуществления настоящего изобретения.
Последовательная рычажная конфигурация 150 согласно аспекту настоящего изобретения конфигурируется как содержащаяся в конструкции для балансировки орудийного ствола системы вооружения, установленной на транспортное средство согласно настоящему изобретению. Система вооружения может быть системой C вооружения, как описано со ссылкой на фиг. 1a-b и фиг. 2.
Система вооружения содержит орудийный ствол 20, установленный на башню через орудийный лафет 30. Орудийный лафет может быть орудийным лафетом 30, как описано со ссылкой на фиг. 3, 4a-b и 5a-b. Орудийный лафет выполняется с возможностью позволять вертикальную наводку орудийного ствола 20 относительно оси Z1 вертикальной наводки.
Упомянутая конструкция содержит систему подвески, сконфигурированную, чтобы предоставлять крутящий момент, препятствующий нарушению баланса орудийного ствола 20. Система подвески может быть системой S подвески, как описано со ссылкой на фиг. 3, 4a-b и 5a-b. Система подвески содержит торсионный стержень 40, имеющий первый концевой участок, сконфигурированный, чтобы неподвижно прикрепляться к башне, и второй концевой участок, сконфигурированный, чтобы соединяться с орудийным лафетом 30 таким образом, чтобы предоставлять упомянутый крутящий момент. Торсионный стержень может быть торсионным стержнем 40, как описано со ссылкой на фиг. 3, 4a-b и 5a-b.
Конструкция содержит регулирующее устройство 150 для автоматической регулировки крутящего момента, обеспечиваемого торсионным стержнем системы подвески, на основе нарушения баланса орудийного ствола, чтобы динамически противодействовать нарушению баланса орудийного ствола.
Согласно аспекту настоящего изобретения, иллюстрированное на фиг. 9 регулирующее устройство 150 содержит последовательную рычажную конфигурацию 152, 154, сконфигурированную для обеспечения упомянутой автоматической регулировки крутящего момента, обеспечиваемого торсионным стержнем 40 системы подвески, на основе вертикальной наводки орудийного ствола 20. Регулирующее устройство 150 содержит рычажную конструкцию Li для упомянутой последовательной рычажной конфигурации 152, 154.
Согласно аспекту настоящего изобретения последовательная рычажная конфигурация 152, 154 содержит первое некруглое зубчатое колесо 152. Первое некруглое зубчатое колесо 152 может также быть обозначено как первая некруглая зубчатая шестерня 152. Первое некруглое зубчатое колесо 152 конфигурируется, чтобы прикрепляться к торсионному стержню 40. Первое некруглое зубчатое колесо 152 согласно аспекту настоящего изобретения конфигурируется, чтобы прикрепляться к торсионному стержню 40 через первую тягу Li1. Первая тяга Li1 согласно варианту осуществления содержится в рычажной конструкции Li. Регулирующее устройство 150 содержит согласно варианту осуществления рычажный элемент 156 предварительного натяжения, сконфигурированный, чтобы обеспечивать предварительное натяжение торсионного стержня 40. Первое некруглое зубчатое колесо 152 согласно аспекту настоящего изобретения конфигурируется, чтобы прикрепляться к рычажному элементу 156 предварительного натяжения, и, следовательно, торсионному стержню 40, через упомянутую первую тягу Li1. Первая тяга Li1, таким образом, согласно варианту осуществления конфигурируется, чтобы соединяться с рычажным элементом 156 предварительного натяжения.
Первое некруглое зубчатое колесо 152 согласно аспекту настоящего изобретения конфигурируется для присоединения с возможностью вращения вокруг оси Z3. Первое некруглое зубчатое колесо 152 согласно аспекту настоящего изобретения конфигурируется для присоединения с возможностью вращения к неподвижной оси A3, имеющей упомянутую ось Z3 вращения, вокруг которой упомянутое первое некруглое зубчатое колесо 152 выполняется с возможностью вращаться. Ось Z3, вокруг которой упомянутое первое некруглое зубчатое колесо 152 выполняется с возможностью вращаться, согласно варианту осуществления является параллельной оси Z2 торсионного стержня.
Согласно аспекту настоящего изобретения последовательная рычажная конфигурация 152, 154 содержит второе некруглое зубчатое колесо 154. Второе некруглое зубчатое колесо 154 может также быть обозначено как вторая некруглая зубчатая шестерня 154. Второе некруглое зубчатое колесо 154 конфигурируется для прикрепления к орудийному лафету в соединении с осью Z1 вертикальной наводки. Второе некруглое зубчатое колесо 154 согласно аспекту настоящего изобретения конфигурируется, чтобы прикрепляться к орудийному лафету через вторую тягу Li2. Вторая тяга Li2 согласно варианту осуществления содержится в рычажной конструкции Li.
Второе некруглое зубчатое колесо 154 согласно аспекту настоящего изобретения конфигурируется для присоединения с возможностью вращения вокруг оси Z4. Второе некруглое зубчатое колесо 154 согласно аспекту настоящего изобретения конфигурируется для присоединения с возможностью вращения к неподвижной оси A4, имеющей упомянутую ось Z4 вращения, вокруг которой упомянутое второе некруглое зубчатое колесо 154 выполняется с возможностью вращаться. Ось Z4, вокруг которой упомянутое второе некруглое зубчатое колесо 154 выполняется с возможностью вращаться, согласно варианту осуществления, является параллельной оси Z1 вертикальной наводки орудийного лафета.
Второе некруглое зубчатое колесо 154 конфигурируется, чтобы передавать крутящий момент первому некруглому зубчатому колесу 152 во время вертикальной наводки орудийного ствола.
Таким образом, когда существует вертикальная наводка орудийного ствола 20, т.е. когда орудийный лафет 30 поворачивается вокруг оси Z1 вертикальной наводки, второе некруглое зубчатое колесо 154 вращается вокруг оси Z4 посредством второй тяги Li2.
Первое некруглое зубчатое колесо 152, зацепляющееся со вторым некруглым зубчатым колесом 154, тогда вращается вокруг оси Z3 посредством второго некруглого зубчатого колеса 154. Вследствие конфигурации упомянутой последовательной рычажной конфигурации 152, 154, т.е. вследствие некруглой формы зубчатых колес 152, 154, первое некруглое зубчатое колесо 152 будет вращаться вместе со вторым некруглым зубчатым колесом 154, но с другим углом в зависимости от вращения вокруг оси Z1 вертикальной наводки.
Первое некруглое зубчатое колесо, когда вращается вокруг оси Z3, будет тогда передавать перемещение рычажному элементу 156 предварительного натяжения через первую тягу Li1, чтобы обеспечивать некоторое предварительное натяжение торсионного стержня 40 на основе нарушения баланса орудийного ствола 20.
Рычажная конструкция Li, согласно варианту осуществления, содержит соединительную конструкцию Li3, Li4, содержащую третью тягу Li3, присоединенную к торсионному стержню 40, и четвертую тягу, присоединенную к орудийному лафету 30. Третья тяга Li3 и четвертая тяга Li4 связываются вместе. Соединительная конструкция Li3, Li4 конфигурируется, чтобы балансировать орудийный лафет 30. Соединительная конструкция Li3, Li4 может согласно варианту осуществления соответствовать соединительной конструкции L, описанной со ссылкой на фиг. 3, 4a-b и 5a-b.
Предшествующее описание предпочтительных вариантов осуществления изобретения было предоставлено в целях иллюстрации и описания. Оно не предназначено для того, чтобы быть исчерпывающим или чтобы ограничивать изобретение точными формами. Множество модификаций и вариаций должно быть очевидным практикующим специалистам в данной области техники. Варианты осуществления выбраны и описаны таким образом, чтобы лучше всего пояснить принципы изобретения и его практических вариантов применения, тем самым давая возможность другим специалистам в данной области техники понимать изобретение для различных вариантов осуществления и с различными модификациями, которые подходят для конкретного предполагаемого варианта использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАЩИЩЕННАЯ АМБРАЗУРА И БРОНЕМАШИНА С УКАЗАННОЙ АМБРАЗУРОЙ | 2012 |
|
RU2590843C2 |
| ОБЪЕКТ БРОНЕТЕХНИКИ НА КОЛЕСНОМ ШАССИ | 2007 |
|
RU2355992C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533854C1 |
| АРТИЛЛЕРИЙСКОЕ ОРУДИЕ С ВЫКАТОМ "ТЬМАКА" | 2007 |
|
RU2363908C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО ВЫСОКОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2554900C2 |
| УСТРОЙСТВО КОНТРОЛЯ НАПРАВЛЕНИЯ ОСИ КАНАЛА СТВОЛА ОРУДИЯ | 2004 |
|
RU2280225C2 |
| ОРУДИЙНАЯ УСТАНОВКА | 1999 |
|
RU2165575C2 |
| МОТОРНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ВЫПОЛНЕНИЕМ РУЛЕНИЯ ДЛЯ УПРАВЛЯЕМОГО КОЛЕСА | 2012 |
|
RU2555902C2 |
| ЛЁГКАЯ СИСТЕМА ВООРУЖЕНИЯ | 2014 |
|
RU2638203C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2561478C1 |
Система вооружения содержит орудийный ствол (20), установленный на башню (10) через орудийный лафет (30). Орудийный лафет (30) выполнен с возможностью обеспечения вертикальной наводки орудийного ствола (20) относительно оси (Z1) вертикальной наводки. Конструкция (A) содержит систему (S) подвески, сконфигурированную, чтобы обеспечивать крутящий момент, препятствующий нарушению баланса орудийного ствола (20). Конструкция дополнительно содержит регулирующее устройство (50; 150) для автоматической регулировки крутящего момента, обеспечиваемого системой (S) подвески, на основе нарушения баланса орудийного ствола (20), чтобы динамически противодействовать нарушению баланса орудийного ствола (20). Система вооружения с конструкцией (А) установлена на гусеничное транспортное средство. Технический результат – улучшение балансировки орудийного ствола системы вооружения, установленной на транспортное средство. 3 н. и 8 з.п. ф-лы, 9 ил.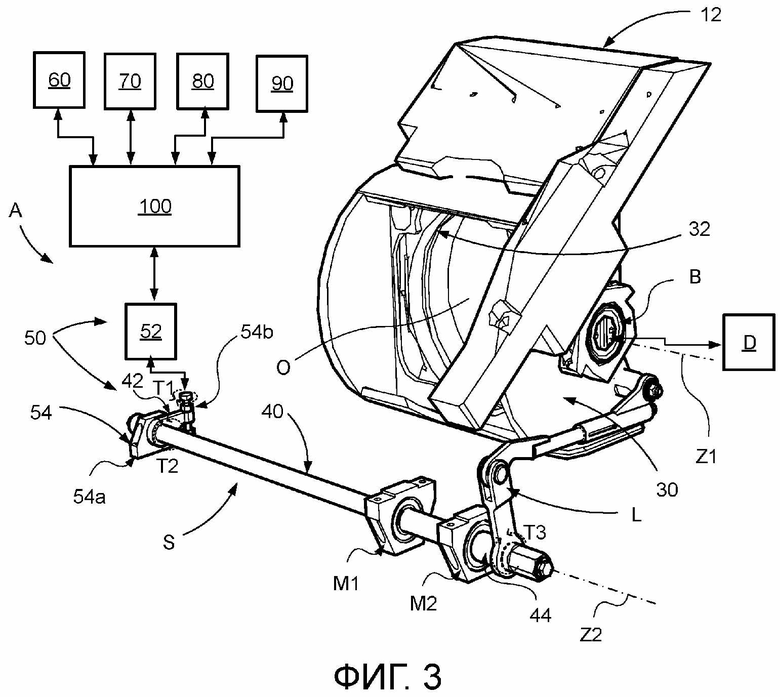
1. Конструкция (А) для балансировки орудийного ствола (20) системы (С) вооружения, установленной на транспортное средство, причем система вооружения содержит орудийный ствол (20), установленный на башню (10) посредством орудийного лафета (30), при этом орудийный лафет (30) выполнен с возможностью обеспечения вертикальной наводки орудийного ствола (20) относительно оси (Z1) вертикальной наводки, причем конструкция (А) содержит систему (S) подвески, выполненную с возможностью обеспечения крутящего момента, препятствующего нарушению балансировки орудийного ствола (20), отличающаяся тем, что она содержит регулирующее устройство (50; 150) для автоматической регулировки крутящего момента, обеспечиваемого системой (S) подвески, на основе нарушения балансировки орудийного ствола (20), чтобы динамически противодействовать нарушению балансировки орудийного ствола (20);
при этом система (S) подвески содержит торсионный стержень (40), имеющий первый концевой участок (42), выполненный с возможностью неподвижного прикрепления к башне (10), и второй концевой участок (44), выполненный с возможностью присоединения к орудийному лафету (30), чтобы обеспечивать указанный крутящий момент;
причем регулирующее устройство (50; 150) выполнено с возможностью регулировки крутящего момента на торсионном стержне (40) на основе нарушения балансировки орудийного ствола (20), чтобы противодействовать нарушению балансировки орудийного ствола (20).
2. Конструкция по п. 1, отличающаяся тем, что регулирующее устройство (50) содержит блок (52) актуатора, выполненный с возможностью обеспечения упомянутой автоматической регулировки крутящего момента, обеспечиваемого системой (S) подвески, на основе данных от датчиков, указывающих текущее нарушение баланса орудийного ствола (20).
3. Конструкция по п. 2, отличающаяся тем, что данные от датчиков, указывающие текущее нарушение балансировки орудийного ствола (20), содержат усилие, требуемое приводной конструкцией для приведения в действие орудийного ствола (30), и/или текущую вертикальную наводку орудийного ствола (20), и/или текущий наклон относительно продольной и поперечной осей транспортного средства (V), и/или текущий вес орудийного ствола (20).
4. Конструкция по п. 2 или 3, отличающаяся тем, что она содержит устройство (100) управления, выполненное с возможностью управления регулирующим устройством (50) на основе упомянутых данных от датчиков, указывающих текущее нарушение балансировки орудийного ствола (20).
5. Конструкция по п. 1, отличающаяся тем, что регулирующее устройство (150) содержит последовательную рычажную конфигурацию (152, 154), выполненную с возможностью обеспечения упомянутой автоматической регулировки крутящего момента, обеспечиваемого системой (S) подвески, на основе вертикальной наводки орудийного ствола (20).
6. Конструкция по п. 5, отличающаяся тем, что последовательная рычажная конфигурация (152, 154) содержит первое некруглое зубчатое колесо (152), прикрепленное к торсионному стержню (40), и второе некруглое зубчатое колесо (154), прикрепленное к орудийному лафету (30) в соединении с осью (Z1) вертикальной наводки и выполненное с возможностью передачи крутящего момента первому некруглому зубчатому колесу (152) во время вертикальной наводки орудийного ствола (20).
7. Способ, выполняемый устройством (100) управления для балансировки орудийного ствола (20) системы (С) вооружения, установленной на транспортное средство, причем система вооружения содержит орудийный ствол (20), установленный на башню посредством орудийного лафета (30), при этом орудийный лафет (30) выполнен с возможностью обеспечения вертикальной наводки орудийного ствола (20) относительно оси (Z1) вертикальной наводки, причем способ включает обеспечение крутящего момента, препятствующего нарушению баланса орудийного ствола (20) посредством системы (S) подвески, отличающийся тем, что:
автоматически регулируют крутящий момент, обеспечиваемый системой (S) подвески, на основе нарушения баланса орудийного ствола (20), чтобы динамически противодействовать нарушению баланса орудийного ствола (20);
при этом система (S) подвески содержит торсионный стержень (40), имеющий первый концевой участок (42), выполненный с возможностью неподвижного прикрепления к башне (10), и второй концевой участок (44), выполненный с возможностью присоединения к орудийному лафету (30), чтобы обеспечивать упомянутый крутящий момент.
8. Способ по п. 7, отличающийся тем, что: определяют текущее нарушение баланса орудийного ствола (20); и
обеспечивают упомянутую автоматическую регулировку посредством блока (52) актуатора на основе данных от датчиков из определенного, таким образом, нарушения баланса орудийного ствола (20).
9. Способ по п. 8, отличающийся тем, что при определении текущего нарушения баланса орудийного ствола (20) осуществляют один или более этапов, на которых: определяют усилие, требуемое приводной конструкцией для приведения в действие орудийного лафета (30); обнаруживают текущую вертикальную наводку орудийного ствола (20); обнаруживают текущие наклоны относительно продольной и поперечной осей транспортного средства; и определяют текущий вес орудийного ствола (20).
10. Транспортное средство, отличающееся тем, что оно содержит конструкцию для балансировки орудийного ствола (20) системы вооружения, установленной на транспортное средство, по любому из пп. 1-6.
11. Транспортное средство по п. 10, отличающееся тем, что оно является гусеничным транспортным средством.
| US 5014594 A1, 14.05.1991 | |||
| EP 3399273 B1, 31.07.2019 | |||
| ПРИЕМНИК РЕНТГЕНОВСКИХ ИЗОБРАЖЕНИЙ | 2007 |
|
RU2352086C1 |
| EP 2875307 A1, 27.05.2015 | |||
| Способ ограничения вибраций на металлорежущем станке и устройство для его осуществления | 1985 |
|
SU1278815A1 |
| ПЕРЕМЕННАЯ ПЕРЕДАЧА ВЕЛОСИПЕДА | 1989 |
|
RU2069634C1 |
| Привод велосипеда | 1988 |
|
SU1562219A1 |
| DE 3241665 A, 17.05.1984 | |||
| FR 3052550 B1, 25.05.2018. | |||

