Изобретение относится к летательному аппарату, в частности миниатюрному летательному аппарату с дистанционным управлением, содержащему по меньшей мере одну несущую поверхность, по меньшей мере одну пару винтовых двигателей и весовой элемент, положение которого может изменяться в продольном направлении летательного аппарата для изменения центра тяжести летательного аппарата.
Летательный аппарат этого типа известен из документа WO 2008/007147 A1. В этом случае маятник, расположенный под летательным аппаратом, применяют в качестве весового элемента. Состояние свободного полета летательного аппарата может быть достигнуто, если маятник размещен подходящим образом. Этот летательный аппарат дополнительно оснащен боковым узлом, хвостовой частью и, соответственно, отдельными поверхностями управления.
В этом случае недостатком является то, что таким летательным аппаратом или миниатюрным летательным аппаратом можно управлять только после длительного периода подготовки. Кроме того, такие летательные аппараты являются относительно громоздкими, например, из-за того, что хвостовая балка находится в хвостовой части и/или маятникообразного устройства весового элемента. Это затрудняет транспортировку летательного аппарата. Кроме того, летательный аппарат может быть легко поврежден во время его транспортировки и/или неблагоприятных летных маневров.
Это существенно ограничивает область потенциальных применений летательных аппаратов, например, в качестве разведывательного дрона.
В связи с этим, изобретение основано на цели усовершенствования летательного аппарата, в частности, миниатюрного летательного аппарата с дистанционным управлением первоначально указанного типа, таким образом, что реализуется более компактная и более прочная конструкция с улучшенными летными характеристиками. На основе признаков вступительной части пункта 1 формулы изобретения, эта цель достигается с признаками, раскрытыми в отличительной части этого пункта формулы изобретения.
В предлагаемом миниатюрном летательном аппарате с дистанционным управлением, в частности предпочтительным является то, что несущая поверхность расположена над плоскостью, ограниченной осями вращения винтовых двигателей для того, чтобы генерировать подъемную силу, в частности, для взлета и/или посадки из неподвижного состояния.
Это дает возможность реализовать очень компактную конструкцию. В дополнение, предлагаемое расположение несущей поверхности относительно винтового двигателя уже приводит к высокой подъемной силе в неподвижном состоянии и, следовательно, способствует очень медленной взлетной и/или посадочной скорости, в частности, за счет эффекта Кастера. Летательный аппарат в частности подходит для вертикального взлета и/или посадки летательного аппарата. В этом контексте термин пропеллер также представляет винтовые двигатели, роторы или другие типы аэродинамических двигателей.
Несущая поверхность предпочтительно выполнена в виде верхней несущей поверхности, которая расположена над нижней несущей поверхностью, при этом верхняя несущая поверхность и нижняя несущая поверхность, в частности, интегрированы в одно замкнутое крыло для того, чтобы реализовать летательный аппарат без фюзеляжа. В этой концепции «закрытого крыла» верхняя несущая поверхность и нижняя несущая поверхность жестко соединены друг с другом и на расстоянии друг от друга посредством боковых поверхностей на двух концах несущей поверхности, обращенных в сторону друг от друга, в частности, по всей хорде верхней несущей поверхности и/или нижней несущей поверхности. Тип фюзеляжа, применяемого в обычных летательных аппаратах, не является обязательным. Это способствует стабильным и, следовательно, улучшенным летным характеристикам. Таким образом, летательный аппарат легче контролировать. Человек может быть обучен управлению, например, таким дистанционно-управляемым миниатюрным летательным аппаратом, в ускоренном режиме. Кроме того, за счет закрытого крыла реализуется более компактная и более прочная конструкция.
Летательный аппарат имеет малый вес, в частности, менее 1 кг. Кроме того, летательный аппарат, по существу образован крылом. Это уменьшает риск повреждений летательного аппарата, в частности в виде беспилотного и дистанционно-управляемого миниатюрного летательного аппарата, во время его транспортировки и/или неблагоприятного летного маневра. Летательный аппарат предпочтительно выполнен в виде летающего крыла. В конструкции в виде летающего крыла или квази-летающего крыла, выступающих компонентов, таких как, например, хвостовая балка, в значительной степени избегают, при этом риск повреждения во время транспортировки или в полете, дополнительно уменьшен. Верхняя несущая поверхность и нижняя несущая поверхность могут быть расположены поверх друг друга так, что они полностью перекрываются, чем достигается более компактная конструкция. Летательный аппарат в частности стабилизируется в полете и/или сваливание в значительной степени предотвращается.
Согласно другому варианту осуществления, закрытое крыло реализовано в виде кольцевого крыла или коробчатого крыла. Кольцевое крыло предпочтительно выполнено в виде вертикального кольцевого крыла так, что трубчатый корпус, который открыт в переднюю и заднюю стороны, относится к предполагаемому направлению полета, либо в виде открытого кольцевого крыла. Кольцевое крыло или коробчатое крыло являются известными концепциями крыльев, которые способствуют надежной конструкции и/или стабильности летных характеристик. Кроме того, конструкции крыльев этого типа имеют отличные несущие характеристики так, что может быть реализована медленная взлетная скорость. Несущая поверхность и/или крыло могут состоять из пленочного материала, который может быть изготовлен экономически эффективно и легко транспортирован. При применении пленочного материала, его можно просто свернуть для транспортировки. В этом случае установка реализуется путем простого разворачивания и присоединения материала пленки к конструкции каркаса. Также в качестве альтернативы или в дополнение к пленочному материалу было бы возможным применять материалы из углеродного волокна или других подходящих волокон композитных материалов. Это способствует высокой стабильности и легкости конструкции.
Согласно улучшениям, верхняя несущая поверхность, нижняя несущая поверхность и/или крыло выполнены жесткими, пленочными или надувными. Жесткая конструкция несущей поверхности и/или крыла обеспечивает преимущество в частности стабильной и надежной конструкции. В альтернативном варианте осуществления несущая поверхность и/или все крыло может быть реализовано надувным, так что летательный аппарат может быть упакован, в частности, компактным образом для его транспортировки. Для вылета, несущая поверхность и/или крыло могут быть выполнены так, что они самонадуваются посредством потока воздуха, например, как параплан, или состоять из камеры или резервуара, которые могут быть надуты и закрыты. Камеры или резервуары могут быть заполнены воздухом или рабочим веществом для питания привода и/или блока питания для летательного аппарата. Камеры или резервуары могут содержать, например, водород для работы топливного элемента определенного летательного аппарата.
Пропеллеры пары винтовых двигателей предпочтительно расположены перед или за двумя несущими поверхностями, обозначенными в продольном направлении летательного аппарата, с целью создания воздушного потока над верхней несущей поверхностью и/или нижней несущей поверхностью. Следовательно, два пропеллера двух винтовых двигателей расположены перед или за одной или более несущими поверхностями и/или крылом, обозначенными в предполагаемом направлении полета. Предпочтительным является обеспечение двух или более пар винтовых двигателей. Одна или более пар винтовых двигателей предпочтительно расположены соосно. В ходе эксплуатации, вращающиеся винтовые двигатели уже проводят и/или всасывают воздух через обе несущие поверхности крыла с высокой скоростью в неподвижном состоянии или при очень медленной скорости полета летательного аппарата. Это дает возможность реализовать в частности медленную взлетную скорость. При расположении верхней несущей поверхности, которая расположена над верхней несущей поверхностью, для генерации вертикальной тяги может использоваться площадь поверхности, которая примерно в два раза больше, чем у конструкции только с одной несущей поверхностью. Летательный аппарат предпочтительно выполнен в виде миниатюрного летательного аппарата, который может взлетать с руки человека. Летательный аппарат реализуется, в частности, в виде летательного аппарата с возможностью вертикального взлета и/или посадки, т.е. ВВП-совместимый (ВВП: вертикальный взлет и посадка).
Пара винтовых двигателей предпочтительно расположена между верхней несущей поверхностью и нижней несущей поверхностью. Это уменьшает риск повреждения винтовых двигателей, так как винтовые двигатели по меньшей мере частично окружены или скрыты двумя несущими поверхностями и/или крылом. В таком расположении винтовых двигателей, кроме того, возможно реализовать малые диаметры пропеллеров для того, чтобы генерировать одновременный поток воздуха через верхнюю и нижнюю несущие поверхности.
Кроме того, верхняя несущая поверхность и/или нижняя несущая поверхность расположены между осью вращения винтовых двигателей и максимальным размахом крыла пропеллеров. Это гарантирует, что воздух проходит через верхнюю сторону нижней несущей поверхности и/или верхней несущей поверхности с высокой скоростью посредством пропеллеров во время эксплуатации летательного аппарата. Это способствует медленной скорости взлета и, в частности, ВВП-совместимой конструкции летательного аппарата.
Пропеллеры винтовых двигателей предпочтительно по меньшей мере частично закрыты по меньшей мере одним ограждением пропеллера в области окружности пропеллера. Это уменьшает риск повреждений пропеллеров во время транспортировки и/или в полете. Пропеллеры нескольких винтовых двигателей могут быть соответственно закрыты ограждением пропеллера по отдельности и, в частности, быть реализованы в виде закрытого пропеллера и совместно закрыты одним ограждением пропеллера. Если для каждого пропеллера обеспечено отдельное ограждение пропеллера, индивидуальные элементы ограждения могут быть подсоединены друг к другу посредством скобок.
Кроме того, ограждение пропеллера может быть жестко соединено с одной или несколькими несущими поверхностями или крылом, в частности, с помощью скобок, так что в целом достигается надежная и компактная конструкция. Конструкция летательного аппарата предпочтительно реализована в полужестком виде. Это значительно снижает риск резонансного эффекта. Крыло находится, в частности, в пределах окружности ограждения пропеллера. Максимальная высота и ширина летательного аппарата определяется, в частности, высотой и шириной ограждения пропеллера.
Статическая тяга закрытых пропеллеров предпочтительно превышает статическую тягу незакрытых пропеллеров так, что это способствует дополнительному замедлению взлетной скорости. Ограждение пропеллера может иметь, например, цилиндрическое или трубчатое сечение или поперечное сечение, которое является аналогичным или идентичным форме крыла или несущей поверхности. Крыло предпочтительно имеет меньшую высоту, чем ограждение пропеллера и смещено вниз относительно центральной линии ограждения пропеллера. Это способствует отличному потоку воздуха над верхней стороной верхней несущей поверхности и/или нижней несущей поверхности.
Согласно улучшению, весовой элемент расположен по центру на несущей поверхности, в частности между винтовыми двигателями. Весовой элемент дает возможность, например, для балансировки летательного аппарата по его поперечной оси, в частности, для того, чтобы компенсировать различные распределения нагрузки. Весовой элемент предпочтительно служит для стабилизации летательного аппарата по отношению к внешним воздействиям и/или отрицательным аэродинамическим эффектам. Весовой элемент может быть дополнительно применен для управления летательным аппаратом по его поперечной оси таким образом, чтобы высоту полета можно было регулировать. Весовой элемент, который может находиться в различных точках, дает возможность, в частности, для устранения хвостовой балки от хвостовой части, такой как, например, узел руля высоты и/или вертикальное оперение.
Весовой элемент может быть реализован таким образом, что он может линейно перемещаться в продольном направлении летательного аппарата вдоль его центральной линии посредством механизма переключения или поворачиваться вокруг поперечной оси летательного аппарата посредством поворотного механизма, такого как, например, серводвигатель или ультразвуковой двигатель. Весовой элемент предпочтительно соединен с несущей поверхностью и/или нижней частью крыла, в частности, с верхней несущей поверхностью так, что он может поворачиваться относительно поперечной оси. Таким образом, весовой элемент и поворотный механизм по меньшей мере частично защищены от внешних воздействий на верхнюю несущую поверхность и/или нижнюю несущую поверхность или крыло, соответственно. Весовой элемент может быть выполнен для размещения элементов оборудования, таких как, например, блок управления, датчики, аккумуляторы, полезные грузы и т.д.
Согласно другому варианту осуществления, блок управления обеспечен для управления летательным аппаратом, в частности, с помощью пульта дистанционного управления, при этом положение в полете, относящееся к продольной оси и/или вертикальной оси летательного аппарата, может быть скорректировано посредством разности между угловыми скоростями вращения или хордами углов установки винтовых двигателей. Положение в полете может относиться к поперечной оси, кроме того быть регулируемым посредством смещения весового элемента. Следовательно, изменение положения в полете относительно продольной оси, вертикальной оси и/или поперечной оси летательного аппарата может быть реализовано без плоскостей управления. Это уменьшает риск повреждения летательного аппарата во время его транспортировки и/или во время полета. Положение в полете летательного аппарата управляется только посредством тяги, в частности, скорости вращения винтовых двигателей, и посредством распределения веса в продольном направлении летательного аппарата.
Для того чтобы реализовать управление посредством скорости вращения, необходимо обеспечить по меньшей мере одну или более пар винтовых двигателей. В этом случае винтовые двигатели из пары винтовых двигателей смещены от центра летательного аппарата так, что они обращены в сторону друг от друга. Например, если скорость вращения первого винтового двигателя уменьшается, движущая сила, генерируемая на этом винтовом двигателе, также уменьшается. Если скорость вращения второго винтового двигателя одновременно поддерживается на исходном уровне первого винтового двигателя или увеличивается, движущая сила второго винтового двигателя выше, чем движущая сила первого винтового двигателя. Это приводит к тому, что летательный аппарат поворачивается вокруг своей вертикальной оси в направлении первого винтового двигателя. Если летательный аппарат должен поворачиваться вокруг вертикальной оси в направлении второго винтового двигателя, скорость вращения второго винтового двигателя уменьшается относительно скорости вращения первого винтового двигателя.
Средства управления и/или средства энергоснабжения предпочтительно встроены и/или впечатаны в несущую поверхность и/или в крыло. Например, по меньшей мере одна антенна может быть обеспечена в качестве средства управления. Кроме того, солнечный элемент может быть дополнительно или альтернативно обеспечен в качестве средств энергоснабжения. Антенна может также служить в качестве средства энергоснабжения, при этом, энергия передается с помощью микроволн в этом случае. Средства энергоснабжения позволяют заряжать аккумуляторы летательного аппарата. Средства управления и/или средства энергоснабжения предпочтительно реализованы в виде транспондера, в частности RFID (радиочастотная идентификация), которая предпочтительно содержит обратный канал.
Согласно улучшению, которое также может быть возможно отдельно и независимо от цели данного изобретения, средства энергоснабжения реализованы в виде панели для сбора энергии для лазерного луча. Таким образом, можно, например, удаленно заряжать аккумуляторы летательного аппарата с помощью лазерного луча. Предпочтительным является обеспечение нескольких панелей для сбора энергии, которые расположены, в частности, рядом друг с другом. Это дает возможность реализовать саморегулирующееся управление лазерным лучом, таким образом, процесс зарядки упрощается. Если несколько панелей для сбора энергии, расположены рядом друг с другом, кроме того, становится возможным обеспечение автоматического регулирования расстояния. Чем больше расстояние от летательного аппарата, тем шире лазерный луч и большее количество смежно-расположенных панелей для сбора энергии облучения необходимо. Лазерный луч становится более направленным и узким с тем, как уменьшается расстояние до летательного аппарата. Это приводит к тому, что лазерный луч попадает на меньшее количество панелей для сбора энергии. Этот эффект может быть применен для дистанционного управления.
Новый летательный аппарат является в частности подходящим для применения в качестве разведывательного дрона, при этом средства мониторинга предпочтительно расположены на разведывательном дроне. Например, средства мониторинга в виде датчиков изображения могут быть расположены на весовом элементе, переднем крае несущей поверхности и/или крыле и/или переднем крае ограждения пропеллера. Благодаря своей компактной и легкой конструкции, летательный аппарат может легко переноситься одним человеком, например, в рюкзаке. Кроме того, летные характеристики настолько стабильны, что беспилотные летательные аппараты могут управляться одним человеком после более короткого периода обучения, чем период обучения управлением обычных моделей летательных аппаратов. Медленная взлетная скорость в частности является предпочтительной с точки зрения летных характеристик. Это дает возможность запустить летательный аппарат с руки человека, так что летательный аппарат также готов к взлету в любое время на пересеченной местности. Поэтому, для посадки летательного аппарата не требуется специальное захватывающее устройство.
Изобретение описано ниже более подробно со ссылкой на примерные варианты осуществления, которые изображены на чертежах. Кроме того, усовершенствования, преимущества и возможности применения изобретения также приведены из нижеследующего описания примерного варианта осуществления и из чертежей. В этом отношении все описанные и/или графически изображенные характеристики в основном образуют объект изобретения по отдельности или в произвольной комбинации, независимо от их обобщения в формуле изобретения или их ссылок на другие пункты формулы изобретения. Содержание формулы изобретения также является частью описания.
Тем не менее специально отмечается, что изобретение никоим образом не ограничено описанными примерами. В приведенных графических материалах:
на фиг.1 изображен схематический вид спереди предлагаемого летательного аппарата,
на фиг.2 изображен схематический частичный вид сбоку в разрезе предлагаемого летательного аппарата по фиг.1, и
на фиг.3 изображен схематический частичный вид сверху в разрезе предлагаемого летательного аппарата по фиг.1 и 2.
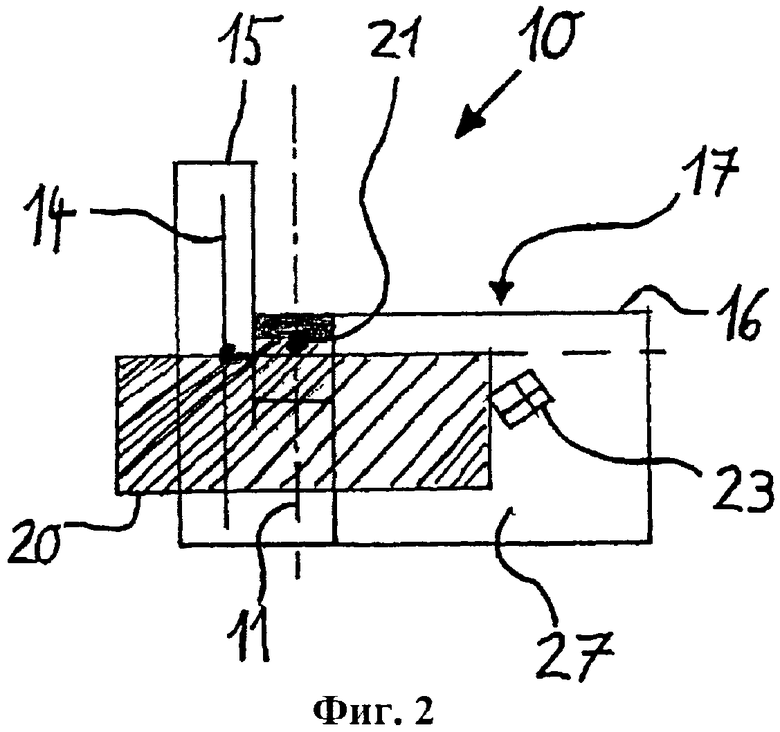
На фиг.1 изображен схематический вид спереди предлагаемого летательного аппарата или миниатюрного летательного аппарата 10. Летательный аппарат 10 реализован аксиально-симметрично относительно вертикальной оси 11 и обеспечен двумя винтовыми двигателями 12, 13, которые соответственно содержат пропеллер 14. В показанном примерном варианте осуществления пропеллеры 14 окружены ограждением 15 пропеллера в области внешней окружности пропеллеров 14. В этом случае одно ограждение 15 пропеллера обеспечено для пропеллеров 14 обоих винтовых двигателей 12, 13. Альтернативно, было бы также не лишенным смысла предусмотреть отдельные элементы ограждения пропеллера для пропеллеров 14 винтовых двигателей 12, 13, при этом эти элементы ограждения пропеллера могут быть соединены друг с другом с целью стабилизации конструкции.
Закрытое крыло 16 расположено за ограждением 15 пропеллера на виде спереди в соответствии с фиг.1 или направлено в заданном направлении полета летательного аппарата 10 соответственно. В показанном примерном варианте осуществления, крыло 16 реализовано в виде кольцевого крыла 16. Летательный аппарат 10 реализован без дополнительного фюзеляжа. Крыло 16 имеет верхнюю несущую поверхность 17, которая расположена над нижней несущей поверхностью 18. Высота крыла 16 меньше, чем высота ограждения 15 пропеллера. В показанном примерном варианте осуществления, высота крыла 16 составляет приблизительно на 1/3 меньше, чем высота ограждения 15 пропеллера. В дополнение, крыло 16 смещено вниз относительно ограждения 15 пропеллера по сравнению с симметричным расположением. Тем не менее в этом случае крыло 16 не выступает за окружность ограждения 15 пропеллера, а остается в пределах этой окружности.
Винтовые двигатели 12, 13 установлены на нижней стороне 19 верхней несущей поверхности 17 на расстоянии друг от друга, и аксиально-симметрично относительно вертикальной оси 11. Кроме того, весовой элемент 20 расположен по центру на нижней стороне 19. В показанном примерном варианте осуществления весовой элемент 20 установлен на нижней стороне 19 посредством шарнирного соединения 21. В этом случае шарнирное соединение 21 позволяет поворачивать весовой элемент 20 относительно поперечной оси 22.
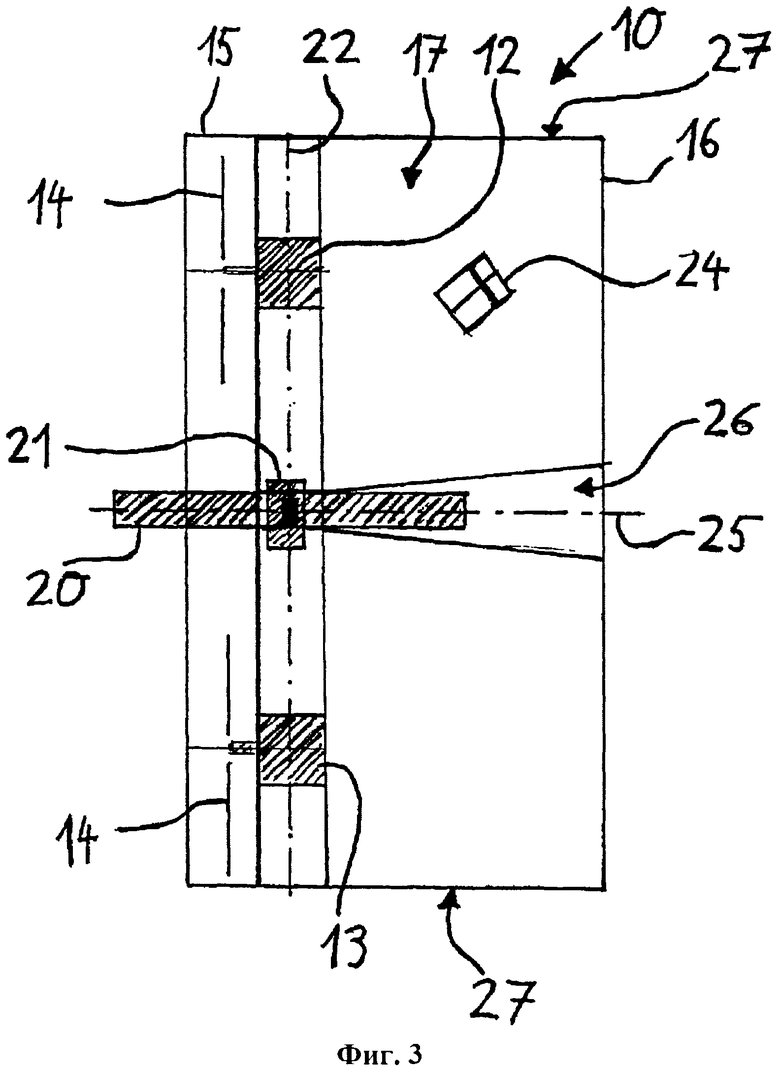
На фиг.2 изображен схематический частичный вид сбоку в разрезе предлагаемого летательного аппарата 10 в соответствии с фиг.1. В показанном примерном варианте осуществления весовой элемент 20 выступает вперед за пределы ограждения 15 пропеллера в заданном направлении полета в этом варианте осуществления. Боковая поверхность 27 соответственно расположена на концах несущей поверхности, которые обращены в сторону друг от друга и проходят по всей хорде верхней и нижней несущих поверхностей 17, 18.
Схематически изображенные средства 23 управления расположены в примерном виде на боковой поверхности 27 крыла 15. В этом случае средства управления 23 реализованы в виде антенны 23, которая встроена в крыло 15 и служит для приема сигналов управления для дистанционного управления беспилотными летательными аппаратами 10.
На фиг.3 изображен схематический частичный вид сверху в разрезе предлагаемого летательного аппарата 10 в соответствии с фиг.1 и 2. Изображенные схематически средства энергоснабжения расположены в примерном виде на верхней несущей поверхности 17. В показанном примерном варианте средства энергоснабжения реализованы в форме солнечного модуля.
Летательный аппарат 10 реализован аксиально-симметрично относительно продольной оси 25. Кроме того, верхняя несущая поверхность 17 имеет секцию 26, которая реализована аксиально-симметрично относительно продольной оси 25. Секция 26 по существу реализована в виде V-формы и сужается в направлении весового элемента 20. Наименьшая ширина секции 26 соответствует ширине весового элемента 20 с тем, чтобы весовой элемент 20 мог выступать за пределы верхней несущей поверхности 17, когда весовой элемент 20 поворачивается вокруг поперечной оси 22. В примерном варианте осуществления, нижняя несущая поверхность 18 также имеет не показаную секцию 26 с тем, чтобы весовой элемент 20 выступал за пределы нижней несущей поверхности 18, когда весовой элемент 20 поворачивается вокруг поперечной оси 22.
Функции летательного аппарата 10 поясняются ниже со ссылкой на фиг.1-3.
Например, в случае когда беспилотный летательный аппарат 10 применяют в качестве разведывательного дрона, летательный аппарат оснащают соответствующими средствами мониторинга. Эти средства мониторинга могут быть неотъемлемыми компонентами весового элемента 20. Энергию, необходимую для работы средств мониторинга, а также для управления летательным аппаратом 10, обеспечивают аккумуляторами и/или одним или более средствами 24 энергоснабжения.
Летательный аппарат 10 имеет такие размеры и такой вес, что миниатюрный летательный аппарат 10 может транспортироваться одним человеком, например, в рюкзаке. Летательный аппарат 10 управляется с помощью дистанционного управления, которое может осуществляться одним человеком. Сигналы дистанционного управления обнаруживаются средствами 23 управления и пересылаются.
В этом случае управление осуществляется таким образом, что летательный аппарат 10 поворачивается вокруг продольной оси 25 и/или вертикальной оси 11 посредством управления винтовыми двигателями 12, 13 с разными скоростями вращения. За счет различных скоростей вращения винтовых двигателей 12, 13, эти винтовые двигатели генерируют разную движущую силу, так что летательный аппарат 10 поворачивается вокруг своей продольной оси 25 и/или его вертикальной оси 11. Таким образом можно управлять направлением полета летательного аппарата 10.
Весовой элемент 20 поворачивается вокруг поперечной оси 22 летательного аппарата 10 для того, чтобы контролировать высоту полета летательного аппарата 10. Это приводит к смещению центра тяжести летательного аппарата 10, и летательный аппарат 10 принимает восходящее или нисходящее положение в зависимости от направления поворота.
Следовательно, для управления летательным аппаратом 10 поверхности управления не требуются, таким образом, летательный аппарат 10 является, в частности, надежным и обладает высокой степенью готовности на земле. Кроме того, необходимость в обеспечении хвостовой балки отсутствует, что приводит к обеспечению компактной конструкции.
Пропеллеры 14, которые расположены перед или, согласно альтернативному варианту, за несущими поверхностями 17, 18, уже проводят воздух над несущими поверхностями 17, 18 с высокой скоростью в неподвижном состоянии. Это приводит к очень медленной взлетной скорости, такой что летательные аппараты 10 соответственно способны взлетать с земли или из рук человека.
Перечень позиций
10 Летательный аппарат или миниатюрный летательный аппарат
11 Вертикальная ось
12 Винтовой двигатель
13 Винтовой двигатель
14 Пропеллер
15 Ограждение пропеллера
16 Крыло
17 Верхняя несущая поверхность
18 Нижняя несущая поверхность
19 Нижняя сторона
20 Весовой элемент
21 Шарнирное соединение
22 Поперечная ось
23 Средства управления
24 Средства энергоснабжения
25 Продольная ось
26 Секция
27 Боковая поверхность.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ | 2007 |
|
RU2339543C1 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| Летательный аппарат, выполненный с возможностью вертикального взлета | 2016 |
|
RU2704771C2 |
| Летательный аппарат вертикального взлета и посадки | 2016 |
|
RU2627220C1 |
| Устройство аэродинамического подъема полезной нагрузки | 2021 |
|
RU2765196C2 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2380276C2 |
| Беспилотный летательный аппарат-перехватчик | 2020 |
|
RU2741142C2 |
| Модульный беспилотный летательный аппарат с системой защиты тяговых винтов | 2020 |
|
RU2752110C1 |
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| Беспилотный летательный аппарат-перехватчик | 2024 |
|
RU2825353C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов. Миниатюрный летательный аппарат с дистанционным управлением содержит по меньшей мере одну несущую поверхность (17), по меньшей мере одну пару винтовых двигателей (12, 13) и весовой элемент (20), положение которого можно менять в продольном направлении для изменения положения центра тяжести миниатюрного летательного аппарата (10). Несущая поверхность (17) расположена над плоскостью, определенной осями вращения винтовых двигателей (12, 13), с целью создания подъемной силы. Несущая поверхность (17) выполнена в виде верхней несущей поверхности (17), которая расположена над нижней несущей поверхностью (18), при этом миниатюрный летательный аппарат выполнен в форме летающего крыла. Положение в полете в отношении продольной оси (25) и/или вертикальной оси (11) летательного аппарата (10) можно регулировать с помощью разницы между движущими силами, предпочтительно между скоростями вращения винтовых двигателей (12, 13). Миниатюрный летательный аппарат может использоваться в качестве разведывательного, для чего оборудуется средствами мониторинга. Достигается возможность создания компактной и прочной конструкции с улучшенными летными характеристиками. 2 н. и 9 з.п. ф-лы, 3 ил.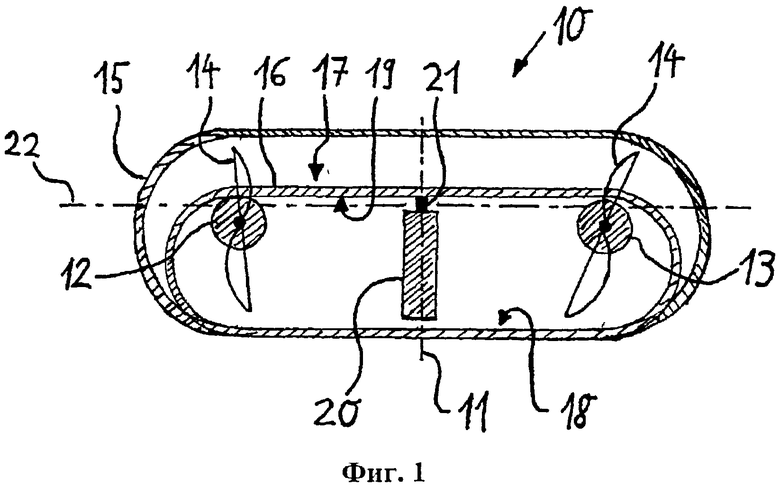
1. Миниатюрный летательный аппарат с дистанционным управлением, содержащий по меньшей мере одну несущую поверхность (17), по меньшей мере одну пару винтовых двигателей (12, 13) и весовой элемент (20), положение которого может быть изменено в продольном направлении миниатюрного летательного аппарата (10) для того, чтобы изменить центр тяжести миниатюрного летательного аппарата (10), при этом несущая поверхность (17) расположена над плоскостью, определенной осями вращения винтовых двигателей (12, 13), с целью создания подъемной силы, отличающийся тем, что несущая поверхность (17) выполнена в виде верхней несущей поверхности (17), которая расположена над нижней несущей поверхностью (18), при этом миниатюрный летательный аппарат выполнен в форме летающего крыла, и при этом положение в полете в отношении продольной оси (25) и/или вертикальной оси (11) летательного аппарата (10) можно регулировать с помощью разницы между движущими силами, предпочтительно между скоростями вращения винтовых двигателей (12, 13).
2. Миниатюрный летательный аппарат по п.1, отличающийся тем, что верхняя несущая поверхность (17) и нижняя несущая поверхность (18) объединены в одно замкнутое крыло (16) для того, чтобы выполнить миниатюрный летательный аппарат (10) без фюзеляжа.
3. Миниатюрный летательный аппарат по п.2, отличающийся тем, что закрытое крыло (16) выполнено в форме кольцевого крыла или коробчатого крыла.
4. Миниатюрный летательный аппарат по п.1, отличающийся тем, что верхняя несущая поверхность (17), нижняя несущая поверхность (18) и/или крыло (16) выполнены жесткими, пленочными или надувными.
5. Миниатюрный летательный аппарат по п.1, отличающийся тем, что пропеллеры (14) пары винтовых двигателей (12, 13) расположены спереди или сзади двух несущих поверхностей (17, 18) в отношении указанного продольного направления летательного аппарата (10) для того, чтобы создавать поток воздуха над верхней несущей поверхностью (17) и/или нижней несущей поверхностью (18).
6. Миниатюрный летательный аппарат по п.1, отличающийся тем, что верхняя несущая поверхность (17) и/или нижняя несущая поверхность (18) расположена(ы) между осью вращения винтовых двигателей (12, 13) и максимальным размахом крыла пропеллеров (14), и/или при этом пара винтовых двигателей (12, 13) расположена между верхней несущей поверхностью (17) и нижней несущей поверхностью (18).
7. Миниатюрный летательный аппарат по п.1, отличающийся тем, что пропеллеры (14) винтовых двигателей (12, 13) по меньшей мере частично закрыты по меньшей мере одним ограждением (15) пропеллера в области окружности пропеллера.
8. Миниатюрный летательный аппарат по п.1, отличающийся тем, что весовой элемент (20) расположен по центру на несущей поверхности (17), в частности, между винтовыми двигателями (12, 13), при этом весовой элемент (20) предпочтительно соединен с верхней несущей поверхностью (17) под верхней несущей поверхностью (17) так, что он обладает возможностью поворота относительно поперечной оси (22).
9. Миниатюрный летательный аппарат по п.1, отличающийся тем, что управление миниатюрным летательным аппаратом (10) осуществляется в частности с помощью пульта дистанционного управления, при этом положение в полете в отношении поперечной оси (22) можно регулировать с помощью смещения весового элемента (20).
10. Миниатюрный летательный аппарат по п.1, отличающийся тем, что средства (23) управления и/или средства (24) энергоснабжения встроены и/или впечатаны в несущую поверхность (17, 18) и/или крыло (16).
11. Применение миниатюрного летательного аппарата (10) по одному из предыдущих пунктов в качестве дистанционно управляемого разведывательного дрона, при этом средства мониторинга предпочтительно расположены на разведывательном дроне.
| WO 2008007147 A1, 17.01.2008 | |||
| US 5020740 A, 04.06.1991 | |||
| WO 2009069109 A2, 04.06.2009 | |||
| DE 29502677 U1, 11.05.1995 | |||
| US 2006231675 A1, фиг.1-7 | |||
| СТАКАН ДЛЯ СУШИЛЬНОГО ШКАФА | 1927 |
|
SU6567A1 |

