Область техники, к которой относится изобретение
Изобретение относится к сельскохозяйственной уборочной машине с жаткой, выполненной в виде уборочного навесного орудия, с признаками, раскрытыми в ограничительной части пункта 1 формулы изобретения.
Уровень техники
Рассматриваемая сельскохозяйственная уборочная машина представляет собой любую уборочную машину, оснащенную жаткой, выполненной в качестве навесного уборочного орудия и предназначенной для срезания и захвата убираемой сельскохозяйственной культуры. При этом речь может идти о зерноуборочном комбайне, кормоуборочном комбайне, пресс-подборщике и других подобных машинах. В нижеследующем раскрытии рассматривают уборочную машину, выполненную в качестве зерноуборочного комбайна.
Оптимальная настройка жатки сельскохозяйственной уборочной машины имеет особое значение, так как влияет не только на собственно жатку, но и на все последующие технологические этапы. Большое количество граничных условий, некоторые из которых противоречат друг другу, делает трудноосуществимой ручную настройку параметров жатки.
Для этого известная сельскохозяйственная уборочная машина (ЕР 3132711 А1), на основании которой предложено настоящее изобретение, содержит автоматическую жатку, генерирующую соответствующие параметры жатки в соответствии с выбранными стратегиями уборки урожая на основании поля характеристик. Такая общая концепция автоматической жатки образует комплексную базу для автоматизированной или частично автоматизированной оптимизации параметров жатки. Входными параметрами известной автоматической жатки, помимо введенных пользователем данных, служат сигналы блока датчиков, в который входит система датчиков сельскохозяйственной культуры, предназначенная для определения параметров убираемой сельскохозяйственной культуры, и датчик высоты слоя, предназначенный для определения зависимости высоты слоя от времени.
Одной из задач, встающих при проектировании известной автоматической жатки, является максимально возможное снижение колебаний производительности, то есть колебаний зависимости высоты слоя от времени. Это обусловлено тем, что подобные колебания производительности приводят к потерям на последующих этапах процесса.
Следующей задачей проектирования известной автоматической жатки является максимальное предотвращение потерь зерна непосредственно на жатке.
Раскрытие сущности изобретения
Задачей изобретения является разработка и усовершенствование известной сельскохозяйственной уборочной машины, позволяющие оптимизировать генерирование параметров жатки таким образом, чтобы снизить потери зерна.
Поставленная задача решена сельскохозяйственной уборочной машиной согласно ограничительной части пункта 1 формулы изобретения с признаками, раскрытыми в отличительной части пункта 1 формулы.
В основу предложенного решения положено, прежде всего, знание о том, что согласованная регулировка длины рабочего стола, а также горизонтального и вертикального положения мотовила является необходимым условием для предотвращения потерь зерна собственно на жатке. В частности, это относится к регулировке горизонтального положения мотовила в соответствии с длиной рабочего стола таким образом, чтобы мотовило не выступало по горизонтали за рабочий стол. Подобное выступание привело бы к падению зерна перед рабочим столом жатки до наклонной камеры, что привело бы к потерям, не поддающимся учету оператором транспортного средства.
Кроме того, обнаружилось, что на жатке возникают колебательные эффекты, распространяющиеся через поток транспортируемой убираемой культуры. Такие колебательные эффекты обусловлены тем, что на жатке в зависимости от выставленных параметров жатки периодически возникают эффекты затора, в частности на стороне входа втягивающего шнека, результатом чего становятся колебания зависимости высоты слоя от времени. В связи с тем, что срезание и захват убираемой культуры жаткой представляет собой сложный процесс с многочисленными потенциальными источниками колебаний, колебание зависимости высоты слоя от времени может распространяться на различные частоты колебаний или диапазон частот колебаний в целом.
Кроме того, обнаружилось, что колебания зависимости высоты слоя от времени могут в существенной мере зависеть от изменения длины рабочего стола. Соответственно, по меньшей мере для генерирования длины рабочего стола предложен анализ колебаний зависимости высоты слоя от времени.
Благодаря одновременной и согласованной регулировке длины рабочего стола и горизонтального и вертикального положения мотовила, а также генерированию длины рабочего стола, которое может быть оптимизировано в отношении режима колебаний, открывается возможность снижения потерь зерна не только собственно в жатке, но и на последующих этапах технологического процесса.
В частности, предложено, чтобы вычислительное устройство для реализации стратегии процесса уборки сельскохозяйственной культуры в ходе текущего процесса уборки на основании анализа сигналов блока датчиков одновременно и с согласованием между собой генерировало по меньшей мере следующие параметры жатки: длину рабочего стола, горизонтальное положение мотовила и вертикальное положение мотовила и передавало эти параметры на жатку, причем анализ сигналов, по меньшей мере для генерирования длины рабочего стола, включает в себя анализ колебаний зависимости высоты слоя от времени.
В особенно предпочтительном варианте осуществления согласно пункту 2 стратегия процесса уборки определяется сведением к минимуму предварительно заданных колебательных составляющих в зависимости высоты слоя от времени. В частности, особенно простая реализация этой стратегии раскрыта в пункте 3, в котором предложенный анализ колебаний включает в себя генерирование коэффициента колебательной составляющей в зависимости высоты слоя от времени для заданной частоты колебаний или заданного диапазона частот колебаний. Коэффициент колебаний показывает, какая часть зависимости высоты слоя от времени относится к заданной частоте колебаний или заданному диапазону частот колебаний. По существу, коэффициент колебаний соответствует коэффициенту Фурье при условии, что анализ колебаний представляет собой анализ Фурье.
Предпочтительно, предложенный анализ колебаний зависимости высоты слоя от времени представляет собой анализ Фурье, так что коэффициент колебаний по существу соответствует коэффициенту Фурье. Тем не менее, возможно применение любых других математических методов анализа колебаний.
Испытания показали, что рассматриваемые частоты колебаний расположены в диапазоне нескольких герц, как указано в пункте 4 формулы.
Следующие предпочтительные варианты осуществления, раскрытые в пунктах 5-7 формулы, описывают генерирование параметров жатки, в частности длины рабочего стола, на основании поля характеристик, что позволяет свести к минимуму вышеупомянутую колебательную составляющую, выполнив сравнительно небольшой объем вычислений.
Предпочтительные варианты осуществления, раскрытые в пунктах 8-11 формулы, относятся к регулировке положения мотовила, которое предложено согласовать с длиной рабочего стола, что позволяет эффективно сократить потери зерна непосредственно на жатке.
Краткое описание чертежей
Настоящее изобретение подробно рассмотрено ниже на примере варианта осуществления со ссылкой на фигуры, на которых изображено:
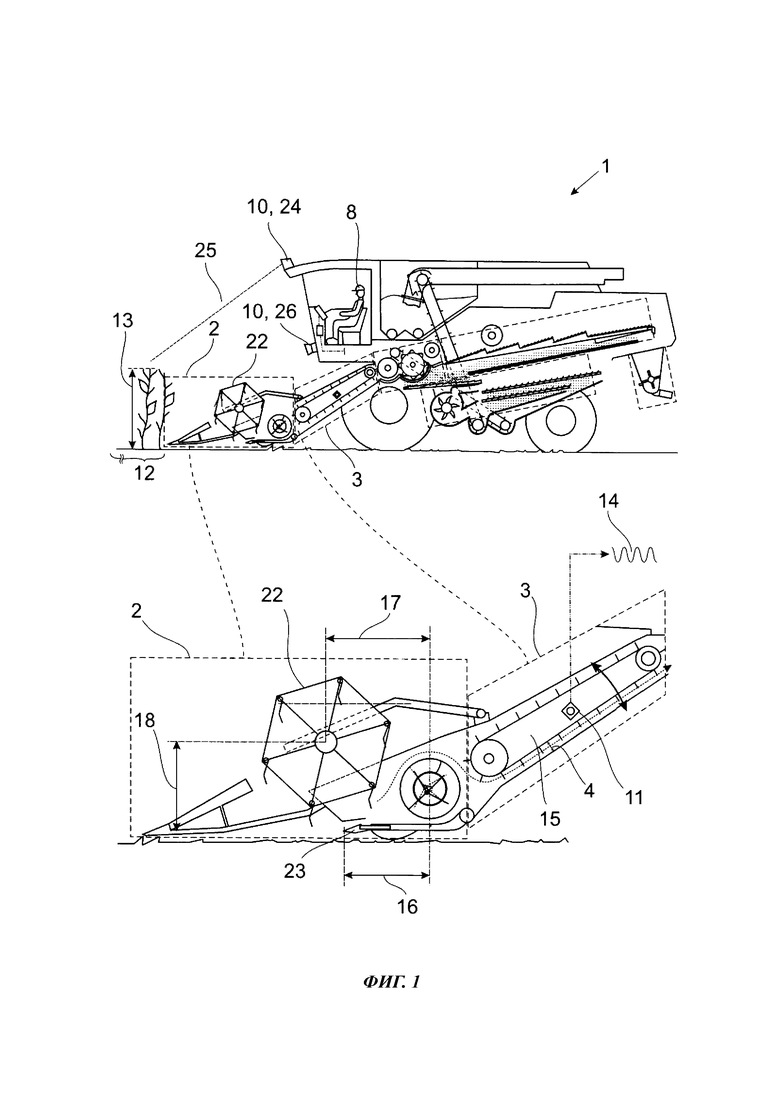
Фигура 1: предложенная сельскохозяйственная уборочная машина, вид сбоку.
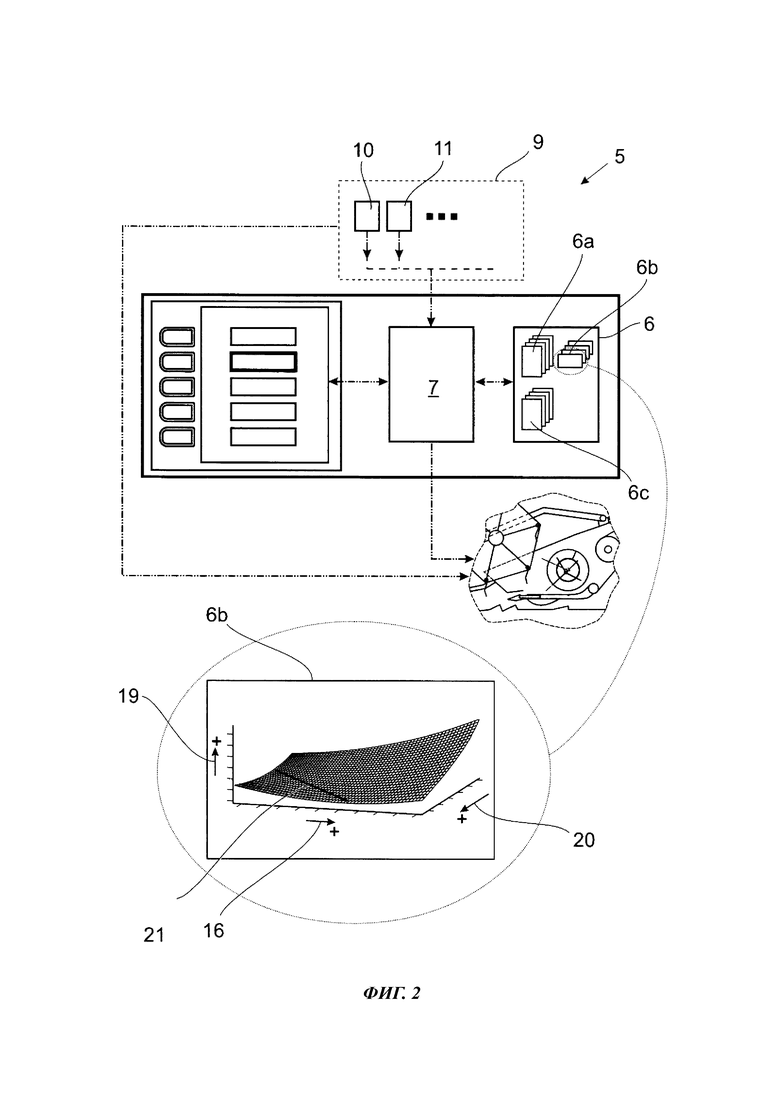
Фигура 2: схематичное изображение системы помощи водителю в предложенной сельскохозяйственной уборочной машине согласно фигуре 1.
Осуществление изобретения
Предложенная сельскохозяйственная уборочная машина 1, в данном случае и предпочтительно выполненная в виде зерноуборочного комбайна, содержит жатку 2, выполненную в виде навесного уборочного орудия и предназначенную для срезания и захвата убираемой культуры. Предпочтительно, жатка 2 может быть заменена другой жаткой 2, что позволяет адаптировать уборочную машину 1 к уборке различных культур. При этом под убираемой культурой понимают весь материал, захватываемый с сельскохозяйственной культуры на поле жаткой 2. Как показано на фигуре 1, сельскохозяйственную культуру на поле скашивают жаткой 2, после чего полученную убираемую культуру подают в наклонную камеру 3. Убираемая культура проходит через наклонную камеру 3 слоем с высотой 4, причем текущее значение высоты 4 слоя соответствует текущей производительности. Это означает, что в наклонной камере 3 устанавливается зависимость 14 высоты слоя от времени, отражающая любые изменения производительности.
Кроме того, предложенная уборочная машина 1 содержит систему 5 помощи водителю, предназначенную для управления жаткой 2. Такая система 5 помощи водителю содержит память 6 для хранения данных, то есть память в информационно-техническом смысле, и вычислительное устройство 7 для обработки данных, хранящихся в памяти 6. По существу, система 5 помощи водителю предназначена для помощи водителю 8 уборочной машины 1 в управлении уборочной машиной 1. Система 5 помощи водителю с памятью 6 и вычислительным устройством 7 схематично показана на фигуре 2.
Помимо вычислительного устройства 7, система 5 помощи водителю содержит блок 9 датчиков, сигналы датчиков которого используются системой 5 помощи водителю для управления жаткой 2. Блок 9 датчиков может содержать несколько датчиков или систем датчиков. В предложенном варианте блок 9 датчиков содержит по меньшей мере одну систему 10 датчиков сельскохозяйственной культуры и один датчик 11 высоты слоя.
Система 10 датчиков сельскохозяйственной культуры служит для определения параметров сельскохозяйственной культуры, в частности, в передней зоне 12 перед уборочной машиной 1. Параметром сельскохозяйственной культуры может быть, например, высота 13 сельскохозяйственной культуры, как будет показано ниже.
Датчик 11 высоты слоя служит для определения зависимости 14 высоты слоя от времени по отношению к вышеупомянутой высоте 4 слоя в наклонной камере 3. В показанном предпочтительном варианте осуществления наклонная камера 3 содержит отклоняемый валок 15 высоты слоя, отклонение которого является мерой текущей высоты 4 слоя в наклонной камере 3. Таким образом, зависимость 14 высоты слоя от времени соответствует сигналу датчика 11 высоты слоя, отслеживающего отклонение валка 15 высоты слоя.
Жатка 2 с системой 5 помощи водителю образует автоматическую жатку. Предпочтительно, это реализуется путем сохранения в памяти 6 нескольких доступных для выбора стратегий 6а процесса уборки и настройки вычислительного устройства 7 на автономное генерирование по меньшей мере одного параметра жатки 2 для реализации выбранной стратегии 6а или стратегий 6а процесса уборки, а также передачи этого параметра на жатку 2. Принципы функционирования такой автоматической жатки раскрыты в европейской патентной заявке ЕР 3132711 А1, которая была подана заявителем и содержание которой является предметом настоящей заявки.
Также существенно, что вычислительное устройство 7 в целях реализации соответствующей стратегии 6а процесса уборки в текущем процессе уборки урожая на основании анализа сигналов блока 9 датчиков одновременно и с согласованием между собой генерирует по меньшей мере следующие параметры жатки: длину 16 рабочего стола, горизонтальное положение 17 мотовила и вертикальное положение 18 мотовила и передает полученные параметры на жатку 2. Выше было упомянуто, что эта мера позволяет существенно снизить потери зерна в жатке 2 и на последующих технологических этапах. Согласование положения мотовила с длиной 16 рабочего стола детально раскрыто ниже на примере горизонтального положения 17 мотовила.
Также существенно, что анализ сигнала, по меньшей мере для генерирования длины 16 рабочего стола, включает в себя анализ колебаний зависимости 14 высоты слоя от времени. Выше также было упомянуто, что колебательные составляющие в зависимости 14 высоты слоя от времени могут в значительной мере регулироваться длиной 16 рабочего стола.
Обе вышеуказанные меры в совокупности радикально снижают потери зерна и выравнивают производительность, причем последний аспект, в свою очередь, приводит к снижению потерь зерна на технологических этапах, следующих за жаткой 2.
Следует отметить, что для определения датчиками зависимости 14 высоты слоя от времени можно использовать другие датчики, помимо упомянутого выше валка 15 высоты слоя. Например, возможно бесконтактное определение высоты 4 слоя.
Предпочтительно, стратегия 6а процесса уборки направлена на сведение к минимуму колебательных составляющих зависимости 14 высоты слоя от времени для заданной частоты колебаний или заданного диапазона частот колебаний. В связи с указанной выше соразмерностью длины 16 рабочего стола в данном контексте предложен вариант, в котором вычислительное устройство 7 для реализации данной стратегии 6а процесса уборки генерирует по меньшей мере длину 16 рабочего стола и передает ее на жатку 2.
Генерирование длины 16 рабочего стола, такое чтобы соответствующие колебания зависимости 14 высоты слоя от времени могли быть сведены к минимуму, можно особенно легко осуществить путем вычислительным образом. Для этого анализ колебаний в первую очередь предусматривает генерирование коэффициента 19 колебаний колебательной составляющей в зависимости 14 высоты слоя от времени для заданной частоты колебаний или заданного диапазона частот колебаний. Коэффициент 19 колебаний в известной мере отражает уровень соответствующей колебательной составляющей в зависимости 14 высоты слоя от времени и по существу может представлять собой коэффициент Фурье, как было упомянуто выше. Также предпочтителен вариант, в котором стратегия 6а процесса уборки направлена на сведение к минимуму коэффициента 19 колебаний, причем вычислительное устройство 7, в свою очередь, для реализации стратегии 6а процесса уборки генерирует по меньшей мере длину 16 рабочего стола и передает ее на жатку 2. Таким образом, достаточно выбрать длину 16 рабочего стола, соответствующую минимальному коэффициенту 19 колебаний.
Вышеуказанная заданная частота колебаний или заданный диапазон частот колебаний, предпочтительно, составляет от 0,5 Гц до 10 Гц, в частности от 1,0 Гц до 5 Гц.
В частности, сведение к минимуму коэффициента 19 колебаний может быть реализовано, предпочтительно, путем сохранения в вычислительном устройстве 7 по меньшей мере одного поля 6b характеристик, отражающего функциональную зависимость между коэффициентом 19 колебаний, длиной 16 рабочего стола и производительностью 20. При этом по меньшей мере длину 16 рабочего стола генерируют на основании поля 6b характеристик. Такое поле 6b характеристик показано на детальном изображении на фигуре 2. При этом производительность 20 представляет собой усредненную по времени производительность, выведенную, предпочтительно, на основании сигналов датчика 11 высоты слоя. В данном случае можно использовать различные способы усреднения.
Детальное изображение на фигуре 2 показывает, что в соответствии с полем 6b характеристик коэффициент 19 колебаний при прохождении диапазона регулировки длины рабочего стола по меньшей мере для части диапазона значений производительности 20 проходит через минимум. Соответственно, вышеупомянутая стратегия 6а процесса уборки позволяет свести к минимуму коэффициент 19 колебаний без выполнения сложных расчетов. Соответственно, на этом детальном изображении приведена оптимальная линия 21, содержащая оптимальные рабочие точки с учетом сведения к минимуму коэффициента 19 колебаний.
Особое преимущество применения поля характеристик заключается в том, что для реализации стратегии 6а процесса уборки не нужно использовать инерционное управление, а вычислительное устройство 7 для реализации стратегии 6а процесса уборки выполняет функции системы управления и извлекает соответствующее значение оптимальной длины 16 рабочего стола из поля 6b характеристик непосредственно и без последовательного (итерационного) приближения. Чтобы гарантировать отражение полем 6b характеристик фактической функциональной зависимости между соответствующими величинами, предпочтителен вариант, в котором вычислительное устройство 7 во время уборки урожая адаптирует поле 6b характеристик к сигналам блока 9 датчиков. При этом исходное состояние поля 6b характеристик, предпочтительно, образует исходное поле 6 с характеристик, записанное в вычислительном устройстве 7. Принципиальное использование полей характеристик в контексте настоящего изобретения раскрыто в европейской патентной заявке ЕР 3132711 А1, содержание которой также является предметом настоящей заявки.
Выше было упомянуто, что положение мотовила генерируют согласованно с длиной 16 рабочего стола. По отношению к горизонтальному положению 17 мотовила это означает, что горизонтальное положение 17 мотовила получают в заданной, предпочтительно линейной, зависимости из длины 16 рабочего стола. Для этого предпочтителен вариант, в котором мотовило 22 устанавливают вертикально над режущим аппаратом 23 жатки 2 с учетом возможно заданного смещения. Это позволяет предотвратить отделение зерна от сельскохозяйственной культуры мотовилом 22 перед срезанием.
Для генерирования вертикального положения 18 мотовила можно использовать различные стратегии.
В данном случае и предпочтительно система 10 датчиков сельскохозяйственной культуры содержит датчик 24 высоты сельскохозяйственной культуры для измерения высоты 13 сельскохозяйственной культуры в передней зоне перед уборочной машиной 1, причем вычислительное устройство 7 генерирует карту высоты сельскохозяйственной культуры в передней зоне 12 перед уборочной машиной 1 на основании сигналов датчика 24 высоты сельскохозяйственной культуры, и на основании карты высоты сельскохозяйственной культуры генерирует вертикальное положение 18 мотовила. При этом в простейшем случае для генерирования вертикального положения мотовила используют линейную зависимость от измеренной высоты 13 сельскохозяйственной культуры.
В качестве датчика 24 высоты сельскохозяйственной культуры можно использовать различные датчики. В представленном предпочтительном примере применяют датчик 24 высоты сельскохозяйственной культуры, представляющий собой датчик расстояния, в частности лазерный датчик расстояния. В особо предпочтительном варианте в качестве датчика 24 высоты сельскохозяйственной культуры используют лазерный сканер, плоскость 25 сканирования которого расположена под углом к убираемой сельскохозяйственной культуре в передней зоне 12 перед уборочной машиной 1. Помимо вышеуказанного датчика 24 высоты сельскохозяйственной культуры можно использовать другие датчики из блока 9 датчиков. В частности, может быть предпочтительным вариант, в котором система 10 датчиков сельскохозяйственной культуры содержит по меньшей мере одну камеру 26, причем вычислительное устройство 7 дополняет карту высот, предпочтительно, на основании сигналов камеры. Это может быть выгодно, например, для определения ориентации полеглых зерновых в передней зоне 12 перед уборочной машиной с целью принятия мер по оптимизации путем соответствующей настройки параметров жатки.
Следует также отметить, что высота 13 сельскохозяйственной культуры на фигуре показана как расстояние от грунта. Тем не менее, высота 13 сельскохозяйственной культуры может быть также относительной величиной, например, она может определяться как изменение высоты сельскохозяйственной культуры вдоль рабочего направления уборочной машины 1. По существу, высота 13 сельскохозяйственной культуры может быть указана в любых единицах измерения, например, в координатах машины, при условии, что она выражает высоту 13 сельскохозяйственной культуры в указанном выше смысле.
Кроме того, следует отметить, что определение высоты 13 сельскохозяйственной культуры может выполняться не только в одной плоскости 25 сканирования, но и в нескольких плоскостях сканирования, предпочтительно, расположенных под различными углами к сельскохозяйственной культуре в передней зоне 12 перед уборочной машиной 1.
Наконец, следует отметить, что предложенное решение затрагивает лишь часть управления уборочной машиной 1 и, в частности, жаткой 2. В частности, следует учитывать, что помимо упомянутых выше параметров жатки существуют и другие параметры жатки, такие как рабочая высота ножа, угол среза, частота вращения втягивающего шнека, частота вращения мотовила, частота резания и т.п., которые также можно регулировать оптимальным образом. В связи с этим предполагается, что предложенное решение будет комбинироваться с другими решениями по настройке других параметров жатки.
Список ссылочных обозначений
1 уборочная машина
2 жатка
3 наклонная камера
4 высота слоя
5 система помощи водителю
6 память
7 вычислительное устройство
8 водитель
9 блок датчиков
10 система датчиков сельскохозяйственной культуры
11 датчик высоты слоя
12 передняя зона
13 высота сельскохозяйственной культуры
14 зависимость высоты слоя
15 валок высоты слоя
16 длина рабочего стола
17 горизонтальное положение мотовила
18 вертикальное положение мотовила
19 коэффициент колебаний
20 производительность
21 оптимальная линия
22 мотовило
23 режущий аппарат
24 датчик высоты сельскохозяйственной культуры
25 плоскость сканирования
26 камера
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА | 2016 |
|
RU2727648C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2019 |
|
RU2796063C2 |
| УСТРОЙСТВО ДЛЯ УБОРКИ СЕЛЬСКОХОЗЯЙСТВЕННОЙ КУЛЬТУРЫ (ВАРИАНТЫ) | 2019 |
|
RU2784488C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ПАРАМЕТРОМ УБОРОЧНОЙ ЖАТКИ | 2019 |
|
RU2747303C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ УБОРОЧНАЯ МАШИНА С ЗАПУСКОМ ИЗМЕНЕНИЯ НАПРАВЛЕНИЙ ДВИЖЕНИЯ ЛЕНТОЧНОЙ ПЛАТФОРМЕННОЙ ЖАТКИ, ГИДРАВЛИЧЕСКИЙ РЫЧАГ И СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ПЛАТФОРМЕННОЙ ЖАТКИ | 2010 |
|
RU2528953C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО УБОРОЧНОГО ПРОЦЕССА | 2018 |
|
RU2765084C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2017 |
|
RU2736730C2 |
| РЕЖУЩИЙ АППАРАТ | 2013 |
|
RU2631685C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2019 |
|
RU2791139C2 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ДЛЯ УБОРОЧНОГО РАБОЧЕГО ОРГАНА | 2019 |
|
RU2786639C2 |
Изобретение относится к сельскому хозяйству. Сельскохозяйственная уборочная машина содержит жатку, выполненную в виде навесного уборочного орудия и предназначенную для срезания и захвата убираемой сельскохозяйственной культуры, наклонную камеру, которая расположена после жатки и в которой может быть установлена зависимость высоты слоя убираемой культуры от времени периодически возникающего затора убираемой культуры на жатке, представляюшая собой частоту колебаний, и систему помощи водителю для управления по меньшей мере жаткой. Система помощи водителю содержит вычислительное устройство и блок датчиков, содержащий систему датчиков сельскохозяйственной культуры для определения параметров сельскохозяйственной культуры, и датчик высоты слоя убираемой культуры для определения указанной зависимости. Вычислительное устройство выполнено с возможностью, для реализации стратегии процесса уборки в ходе текущего процесса уборки на основании анализа сигналов блока датчиков, генерирования одновременно и с согласованием между собой по меньшей мере следующих параметров жатки: длины рабочего стола, горизонтального положения мотовила и вертикального положения мотовила и передачи этих параметров на жатку. Анализ сигналов по меньшей мере для генерирования длины рабочего стола включает в себя анализ Фурье для анализа колебаний указанной зависимости. Обеспечивается оптимизация генерирования параметров жатки таким образом, чтобы снизить потери зерна. 10 з.п. ф-лы, 2 ил.
1. Сельскохозяйственная уборочная машина (1), характеризующаяся тем, что содержит жатку (2), выполненную в виде навесного уборочного орудия и предназначенную для срезания и захвата убираемой сельскохозяйственной культуры, наклонную камеру (3), которая расположена после жатки (2) и в которой может быть установлена зависимость высоты слоя убираемой культуры от времени периодически возникающего затора убираемой культуры на жатке (2), представляющая собой частоту колебаний, и систему (5) помощи водителю для управления по меньшей мере жаткой (2), причем система (5) помощи водителю содержит вычислительное устройство (7) и блок (9) датчиков, содержащий систему (10) датчиков сельскохозяйственной культуры для определения параметров сельскохозяйственной культуры, и датчик (11) высоты слоя убираемой культуры для определения указанной зависимости (14), причем вычислительное устройство (7) выполнено с возможностью, для реализации стратегии (6а) процесса уборки в ходе текущего процесса уборки на основании анализа сигналов блока (9) датчиков, генерирования одновременно и с согласованием между собой по меньшей мере следующих параметров жатки: длины (16) рабочего стола, горизонтального положения (17) мотовила и вертикального положения (18) мотовила и передачи этих параметров на жатку (2), причем анализ сигналов, по меньшей мере для генерирования длины (16) рабочего стола, включает в себя анализ Фурье для анализа колебаний указанной зависимости (14).
2. Машина по п. 1, отличающаяся тем, что стратегия (6a) процесса уборки предусматривает сведение к минимуму колебательных составляющих в зависимости (14) высоты слоя от времени для заданной частоты колебаний или заданного диапазона частот колебаний, причем вычислительное устройство (7) выполнено с возможностью, для реализации этой стратегии (6a) процесса уборки, генерирования по меньшей мере длины (16) рабочего стола и передачи ее на жатку (2).
3. Машина по п. 1 или 2, отличающаяся тем, что анализ колебаний включает в себя определение коэффициента (19) колебаний колебательной составляющей в зависимости (14) высоты слоя убираемой культуры от времени для заданной частоты колебаний или заданного диапазона частот колебаний, причем предпочтительно стратегия (6a) процесса уборки предусматривает сведение к минимуму коэффициента (19) колебаний, при этом вычислительное устройство (7) выполнено с возможностью, для реализации этой стратегии (6a) процесса уборки, генерирования по меньшей мере длины (16) рабочего стола и передачи ее на жатку (2).
4. Машина по п. 2 или 3, отличающаяся тем, что заданная частота колебаний или заданный диапазон частот колебаний составляет от 0,5 Гц до 10 Гц, в частности от 1,0 Гц до 5 Гц.
5. Машина по п. 3 или 4, отличающаяся тем, что в вычислительном устройстве (7) записано по меньшей мере одно поле (6b) характеристик, отражающее функциональную зависимость между коэффициентом (19) колебаний, длиной (16) рабочего стола и производительностью (20), причем генерирование по меньшей мере длины (16) рабочего стола предусмотрено на основании поля (6b) характеристик, причем предпочтительно производительность (20) представляет собой усредненную по времени производительность.
6. Машина по п. 5, отличающаяся тем, что в соответствии с полем (6b) характеристик коэффициент (19) колебаний при прохождении диапазона регулировки длины рабочего стола по меньшей мере для части диапазона значений производительности (20) проходит через минимум.
7. Машина по п. 5 или 6, отличающаяся тем, что вычислительное устройство (7) выполнено с возможностью, во время уборки урожая, адаптации поля (6b) характеристик к сигналам блока (9) датчиков, причем предпочтительно исходное состояние поля (6b) характеристик образует исходное поле (6c) характеристик, записанное в вычислительном устройстве (7).
8. Машина по одному из предыдущих пунктов, отличающаяся тем, что вычислительное устройство (7) выполнено с возможностью генерирования горизонтального положения (17) мотовила согласованно с длиной (16) рабочего стола таким образом, чтобы горизонтальное положение (17) мотовила получалось в заданной, предпочтительно линейной, зависимости из длины (16) рабочего стола.
9. Машина по одному из предыдущих пунктов, отличающаяся тем, что система (10) датчиков сельскохозяйственной культуры содержит датчик (24) высоты сельскохозяйственной культуры для измерения высоты (13) сельскохозяйственной культуры в передней зоне (12) перед уборочной машиной (1), причем вычислительное устройство (7) выполнено с возможностью генерирования карты высоты сельскохозяйственной культуры в передней зоне (12) перед уборочной машиной (1) на основании сигналов датчика (24) высоты сельскохозяйственной культуры и с возможностью генерирования вертикального положения (18) мотовила на основании карты высоты сельскохозяйственной культуры.
10. Машина по п. 9, отличающаяся тем, что датчик (24) высоты сельскохозяйственной культуры представляет собой датчик расстояния, в частности лазерный датчик расстояния, предпочтительно лазерный сканер.
11. Машина по одному из предыдущих пунктов, отличающаяся тем, что система (10) датчиков сельскохозяйственной культуры содержит по меньшей мере одну камеру (26), причем вычислительное устройство (7) выполнено с возможностью дополнения карты высоты на основании сигналов камеры (26).
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2681984C1 |
| EP 1832863 A2, 12.09.2007 | |||
| US 2018332767 A1, 22.11.2018 | |||
| EP 3132711 A1, 22.02.2017. | |||
