Перекрестные ссылки на родственные заявки
Эта заявка связана и претендует на приоритет по предварительной заявке на патент США №62/943 881, озаглавленной "A System for Feather Sexing of Chicks", поданной 5 декабря 2019 г., содержание которой полностью включено в настоящее описание посредством ссылки.
Область техники
Настоящее изобретение относится к области идентификации и оценивания пола и состояния здоровья только что вылупившихся цыплят.
Уровень техники
Определение пола цыплят - это метод определения пола цыплят и других птенцов, обычно выполняемый обученным человеком, называемым специалистом по определению пола цыплят или определителем пола цыплят. Определение пола цыплят применяется в основном крупными промышленными инкубаторами для разделения цыплят-самок или "курочек" (предназначенных для несения яиц для коммерческой продажи) и цыплят-самцов или "петушков" (большинство из которых погибают в течение нескольких дней после вылупления, поскольку они не имеют отношения к несению яиц).
Определение пола только что вылупившихся цыплят может быть достигнуто для большинства видов цыплят путем определения пола по оперению. Определение пола по оперению - это способность определять пол только что вылупившегося цыпленка на основе скоростей роста его перьев на крыльях, которые отличаются в зависимости от пола из-за генетического кодирования. В расправленном положении крылья самки имеют узор из длинных перьев в первичном ряду и коротких перьев во вторичном ряду, в то время как крылья самца имеют узор из перьев одинаковой длины как в первичном, так и во вторичном рядах.
Оценивание здоровья только что вылупившихся цыплят осуществляется в основном путем наблюдения за цыплятами и выявления признаков, характерных для здоровых цыплят, таких как ясные глаза, проворность и активность, форма головы, форма клюва, форма ног и т.п.
На сегодняшний день оценивание состояния здоровья и определение пола только что вылупившихся цыплят выполняется вручную, что связано с необходимостью наблюдения за каждым цыпленком невооруженным глазом и расправления его крыльев для определения состояния его здоровья и пола, соответственно.
Сущность изобретения
Настоящим изобретением предложены системы и способы распознавания и разделения цыплят по полу. В основе системы лежит инстинктивная реакция птенцов на расправление крыльев для сохранения равновесия в ответ на мгновенную потерю ориентации, вызванную внешним фактором, например, из-за резкого изменения перемещения в пространстве.
Настоящее изобретение также включает систему взвешивания и систему обнаружения внешних дефектов тела цыплят для оценивания состояния здоровья цыплят.
Варианты осуществления настоящего изобретения направлены на систему распознавания и разделения цыплят по полу в соответствии с узором их оперения, содержащую: блок разделения, включающий в себя по меньшей мере один конвейер, простирающийся по меньшей мере частично через упомянутый блок разделения; при этом упомянутый по меньшей мере один конвейер выполнен так, чтобы поддерживать путь перемещения вперед упомянутого множества цыплят в очереди; сортировочный блок, выполненный так, чтобы принимать упомянутое множество цыплят в очереди, при этом упомянутый сортировочный блок включает в себя: по меньшей мере один конвейер, простирающийся по меньшей мере частично через упомянутый сортировочный блок, выполненный так, чтобы поддерживать путь перемещения вперед; и по меньшей мере один контейнер, сообщающийся с упомянутым по меньшей мере одним конвейером так, что упомянутый по меньшей мере один контейнер перемещается между первым положением и вторым положением, при этом в нем содержится по меньшей мере один цыпленок из упомянутого множества цыплят; и оптический блок, включающий в себя камеру, выполненную так, чтобы захватывать по меньшей мере одно изображение упомянутого по меньшей мере одного цыпленка, когда упомянутый по меньшей мере один контейнер перемещается между упомянутым первым положением и упомянутым вторым положением, и упомянутое по меньшей мере одно изображение затем передается для обработки изображения для определения пола упомянутого по меньшей мере одного цыпленка.
Факультативно упомянутый по меньшей мере один контейнер сообщается с упомянутым по меньшей мере одним конвейером через подвижный элемент.
Факультативно упомянутое перемещение упомянутого по меньшей мере одного контейнера между упомянутым первым положением и упомянутым вторым положением достигается за счет перемещения штифтовой части упомянутого подвижного элемента вдоль наклонной секции.
Факультативно одновременно с перемещением упомянутого по меньшей мере одного контейнера между упомянутым первым положением и упомянутым вторым положением промежуточная часть упомянутого подвижного элемента может вертикально перемещаться вдоль упомянутого по меньшей мере одного конвейера.
Факультативно упомянутый подвижный элемент управляется компьютеризированным контроллером.
Факультативно упомянутый подвижный элемент включает в себя механизм поворота в сторону, предназначенный для обеспечения возможности удаления содержимого контейнера.
Факультативно упомянутый механизм поворота в сторону управляется упомянутым компьютеризированным контроллером.
Факультативно упомянутая система дополнительно включает в себя компьютеризированный контроллер, выполненный так, чтобы управлять упомянутым по меньшей мере одним конвейером и упомянутой камерой.
Факультативно упомянутый по меньшей мере один конвейер представляет собой один из следующих: ленточный конвейер, U-образный ленточный конвейер, цепной конвейер, приводной роликовый конвейер и их комбинацию.
Факультативно упомянутый по меньшей мере один контейнер имеет форму перевернутой пирамиды с плоской вершиной.
Факультативно упомянутая камера представляет собой высокоскоростную камеру на приборах с зарядовой связью (ПЗС).
Факультативно упомянутый оптический блок дополнительно включает источник света.
Факультативно упомянутый источник света представляет собой светодиодный (LED) источник света.
Факультативно упомянутый источник света управляется компьютеризированным контроллером.
Факультативно упомянутая система дополнительно включает в себя разделительный блок, включающий в себя по меньшей мере одни ворота, предназначенные для приема по меньшей мере одного цыпленка из упомянутого по меньшей мере одного контейнера.
Факультативно упомянутый разделительный блок управляется компьютеризированным контроллером.
Факультативно упомянутая система дополнительно включает в себя счетную машину, предназначенную для контроля количества цыплят, проходящих через упомянутые по меньшей мере одни ворота.
Факультативно упомянутая счетная машина управляется компьютеризированным контроллером.
Факультативно упомянутая система дополнительно включает в себя упаковочную машину, предназначенную для приема цыплят из упомянутых по меньшей мере одних ворот и их упаковки в ящики, пригодные для транспортировки цыплят.
Факультативно упомянутая упаковочная машина управляется компьютеризированным контроллером.
Факультативно упомянутое одно или несколько изображений дополнительно используются для обнаружения дефектов тела у упомянутого по меньшей мере одного цыпленка.
Факультативно упомянутая система дополнительно включает в себя блок взвешивания, соединенный с упомянутым по меньшей мере одним конвейером упомянутого сортировочного блока, при этом упомянутый блок взвешивания включает в себя тензодатчик, предназначенный для выполнения множества измерений веса упомянутого по меньшей мере одного цыпленка, когда упомянутый контейнер достигает его, чтобы определить состояние здоровья упомянутого по меньшей мере одного цыпленка на основе его веса.
Факультативно упомянутый блок взвешивания управляется компьютеризированным контроллером.
Факультативно упомянутый тензодатчик соединен с процессором, предназначенным для вычисления фактического веса упомянутого по меньшей мере одного цыпленка.
Варианты осуществления настоящего изобретения относятся к способу распознавания и разделения цыплят по полу в соответствии с узором их оперения, который включает: размещение упомянутых цыплят вдоль первого пути для обеспечения движения упомянутого множества цыплят в очереди; размещение каждого из упомянутого множества цыплят в очереди в контейнере, при этом упомянутый контейнер размещают вдоль второго пути так, чтобы вызвать перемещение упомянутого контейнера между первым положением и вторым положением, что вынудит каждого из упомянутого множества цыплят расправить свои крылья; захватывание одного или большего количества изображений крыльев каждого из упомянутого множества цыплят, когда упомянутый контейнер перемещается между упомянутым первым положением и упомянутым вторым положением; и обработку упомянутого одного или большего количества изображений крыльев упомянутого по меньшей мере одного цыпленка для определения его пола.
Факультативно упомянутое перемещение упомянутого контейнера между упомянутым первым положением и упомянутым вторым положением включает перемещение по наклонной секции.
Факультативно упомянутый способ дополнительно включает сортировку упомянутых цыплят по полу.
Факультативно упомянутый способ дополнительно включает подсчет упомянутых цыплят каждого пола.
Факультативно упомянутое одно или несколько изображений упомянутого цыпленка дополнительно используются для выявления дефектов тела.
Факультативно упомянутые дефекты тела могут представлять собой один из следующих дефектов: проблемы с перьями, дефектная голова, повернутая голова, скрещенный клюв и их комбинация.
Факультативно упомянутый способ дополнительно включает: выполнение множества считываний значений взвешивания каждого из упомянутого множества цыплят по мере того, как упомянутый контейнер достигает назначенного места на упомянутом втором пути; и подсчет среднего значения упомянутого множества значений считывания измерений взвешивания для определения веса каждого из упомянутого множества цыплят и, тем самым, определения состояния их здоровья.
Если не указано иное, все используемые здесь технические и/или научные термины имеют то же значения, которые обычно понимается специалистом в области, к которой относится настоящее изобретение. Хотя способы и материалы, подобные или эквивалентные тем, что раскрыты в настоящем описании, могут быть использованы на практике или при тестировании вариантов осуществления настоящего изобретения, ниже описаны типичные способы и/или материалы. В случае противоречия описание настоящего изобретения, включая определения, будет иметь преимущественную силу. Кроме того, материалы, методы и примеры являются только иллюстративными и не предназначены для обязательного ограничения.
Краткое описание фигур
Некоторые варианты осуществления настоящего изобретения описаны здесь только в качестве примера со ссылкой на прилагаемые фигуры. С конкретной ссылкой на подробные фигуры следует подчеркнуть, что показанные детали приведены в качестве примера и в целях иллюстративного обсуждения вариантов осуществления настоящего изобретения. В этом отношении описание, приведенное вместе с фигурами, делает очевидным для специалистов в данной области, как варианты осуществления настоящего изобретения могут быть реализованы на практике.
Теперь обратим внимание на фигуры, на которых одинаковые позиции или символы обозначают соответствующие или подобные компоненты.
На фигурах:
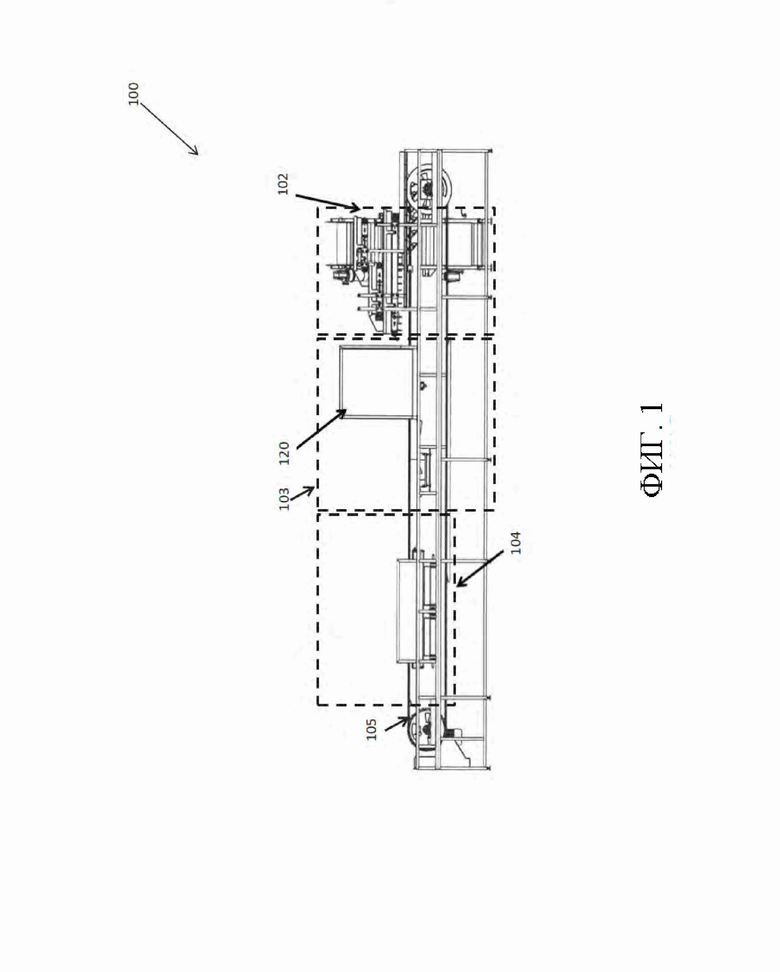
ФИГ. 1 представляет собой вид в перспективе системы распознавания и разделения цыплят по полу в соответствии с одним из вариантов осуществления настоящего изобретения;
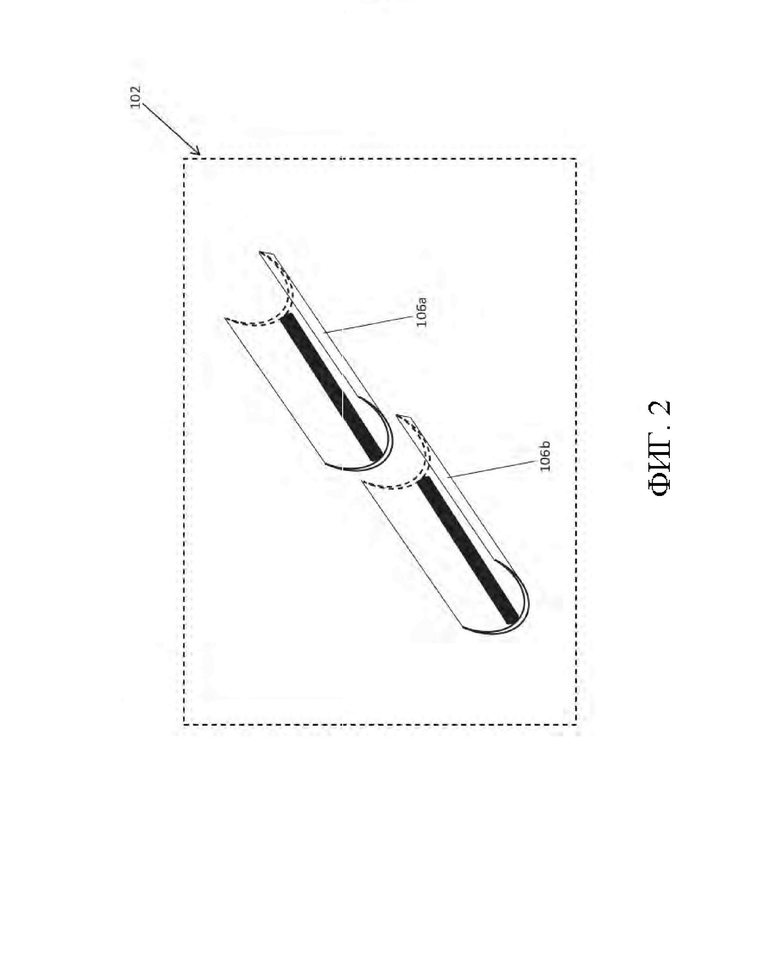
ФИГ. 2 представляет собой вид в перспективе блока разделения системы, показанной на ФИГ. 1;
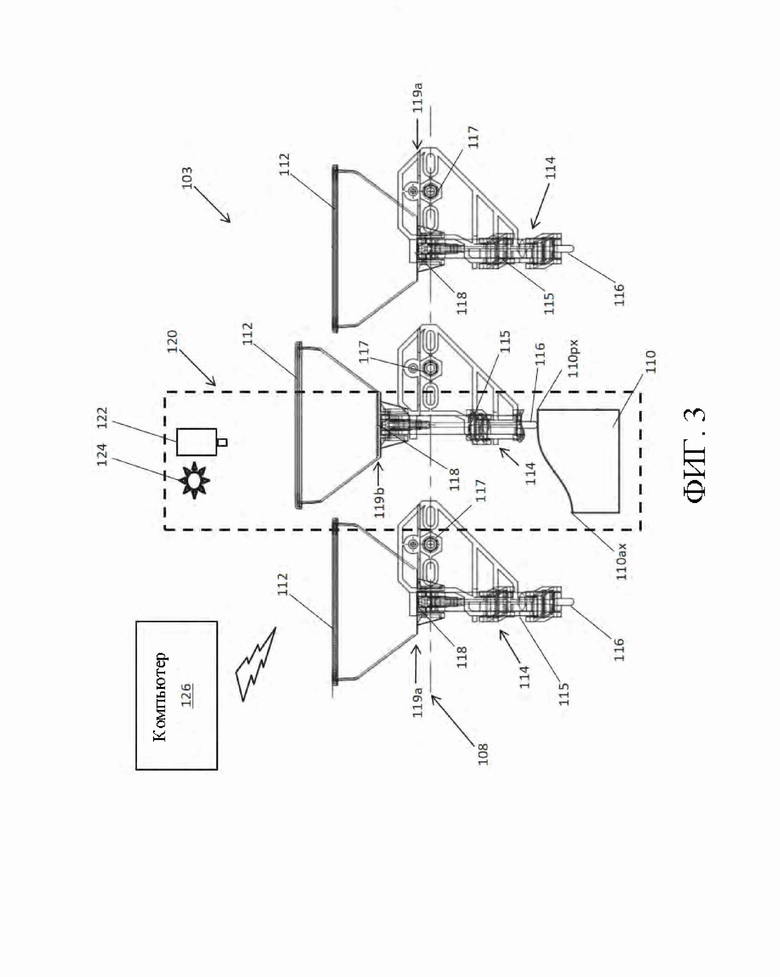
ФИГ. 3 представляет собой вид в перспективе сортировочного блока системы, показанной на ФИГ. 1, который создает потерю равновесия цыплят, заставляя их широко расправлять крылья;
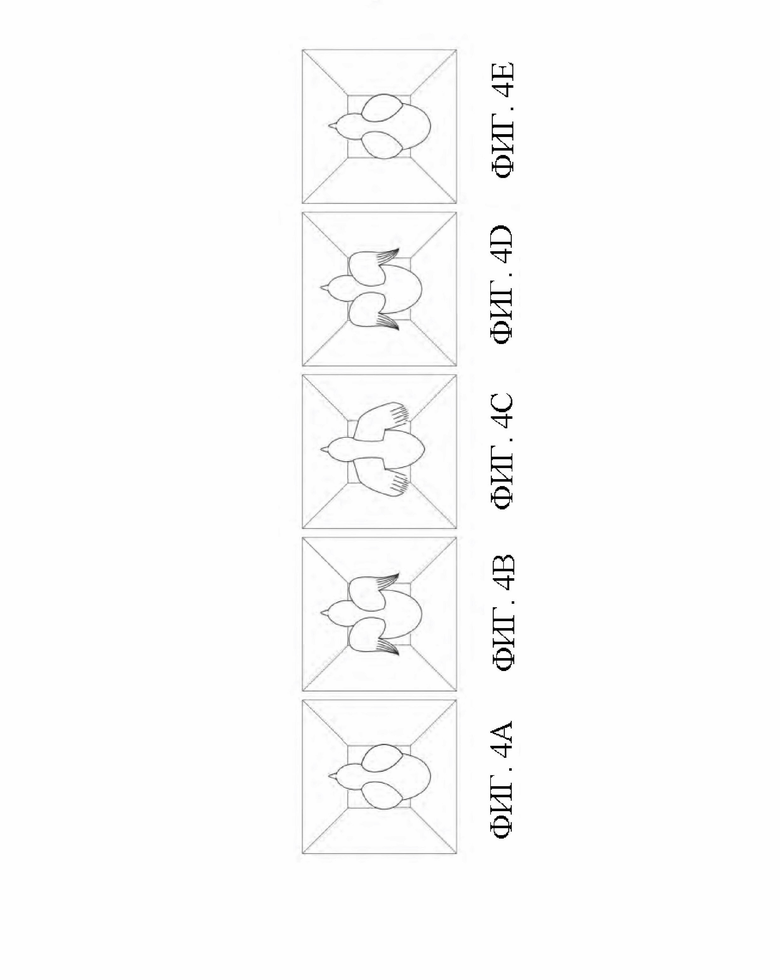
ФИГ. 4А-4Е представляют собой виды сверху, иллюстрирующие переход крыльев цыпленка-самки из сложенного положения в расправленное положение и наоборот;
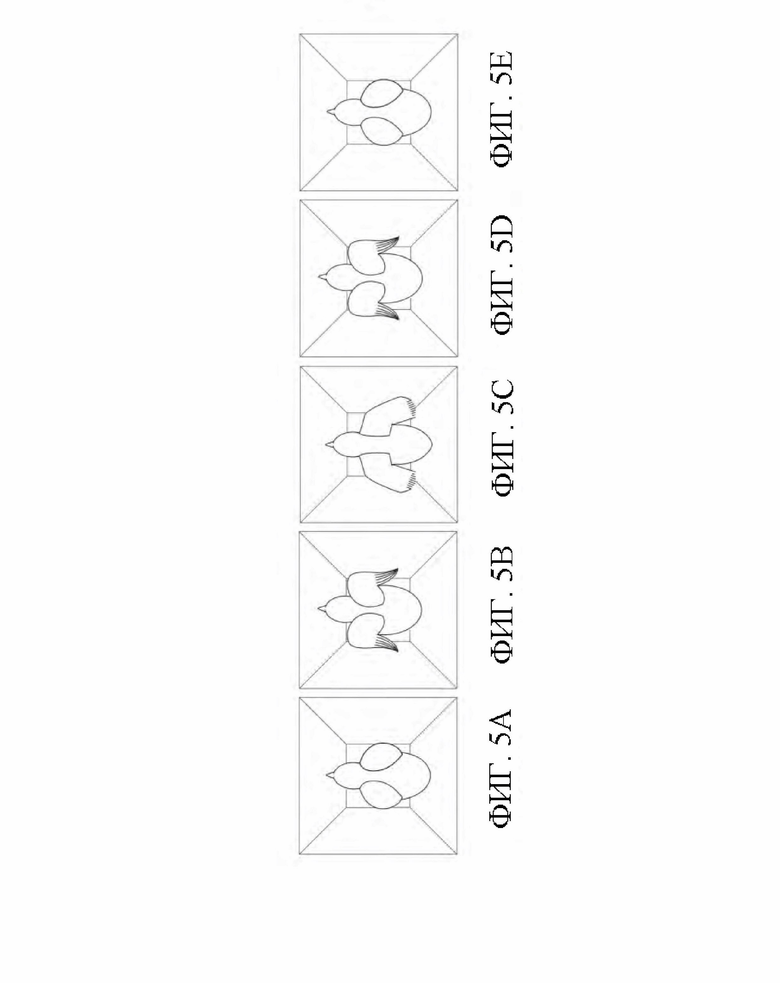
ФИГ. 5А-5Е представляют собой виды сверху, иллюстрирующие переход крыльев цыпленка-самца из сложенного положения в расправленное положение и наоборот.
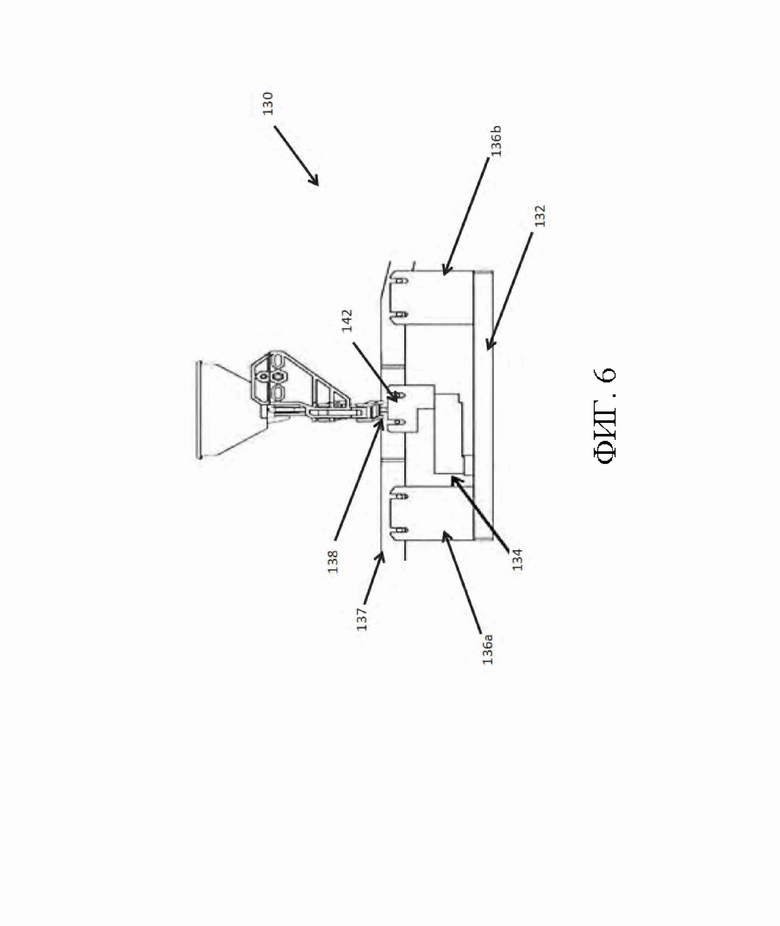
ФИГ. 6 представляет собой вид в перспективе системы взвешивания в соответствии с одним из вариантов настоящего изобретения.
Подробное описание изобретения
Настоящее изобретение не ограничивается в своем применении деталями конструкции и расположением компонентов, изложенными в последующем описании. Изобретение может быть реализовано в других вариантах на практике или реализовано различными способами. Кроме того, следует понимать, что используемые здесь формулировки и терминология предназначены для целей описания и не должны рассматриваться как ограничивающие.
Настоящее изобретение предлагает системы и способы распознавания и разделения цыплят по полу на основе узора их крыльев. Настоящее изобретение основано на инстинктивной реакции цыплят расправлять крылья для поддержания равновесия в ответ на мгновенную потерю ориентации.
ФИГ. 1 представляет собой вид в перспективе системы 100. Система 100 включает в себя блок 102 разделения, имеющий один или несколько конвейеров, сортировочный блок 103 и разделительный блок 104. Система 100 дополнительно включает в себя конвейер 105, который представляет собой, например, ленточный конвейер, простирающийся, по меньшей мере частично, через блок 102 разделения, сортировочный блок 103 и разделительный блок 104.
Блок 102 разделения, который лучше всего показан на ФИГ. 2, включает в себя, например, первый конвейер 106а и второй конвейер 106b, простирающиеся, по меньшей мере частично, через блок 102 разделения, и предназначенные для приема множества цыплят (не показаны). Первый и второй конвейеры 106а-106b, которые представляют собой, например, ленточные конвейеры, расположены последовательно один за другим и сообщаются друг с другом таким образом, чтобы поддерживать путь движения вперед.
Конвейеры, которые являются или частями конвейера 105, или отдельными конвейерами, могут работать с одинаковой скоростью или с разными скоростями и могут приводиться в действие вручную или управляться компьютеризированным контроллером (не показан) по проводным и/или беспроводным сетям или их комбинации.
Блок 102 разделения может сообщаться с другими конвейерами, расположенными перед ним. Эти конвейеры подают цыплят в блок 102 разделения, и могут представлять собой, например, ленточный конвейер, U-образный конвейер, цепной конвейер, приводной роликовый конвейер и т.п.
Сортировочный блок 103, который лучше всего показан на ФИГ. 3, включает в себя наклонную секцию 110, простирающуюся от ближней части 110ах до дальней части 110рх, и конвейер 108, который представляет собой, например, ленточный конвейер. Конвейер 108, который является или частью конвейера 105, или отдельным конвейером, проходит, по меньшей мере частично, через сортировочный блок 103, и может управляться компьютером, компьютеризированным контроллером и т.п., а также вручную.
Сортировочный блок 103 дополнительно включает в себя один или несколько контейнеров, например, контейнер 112, выполненный так, чтобы принимать одного цыпленка. Контейнер 112, который может иметь различную форму, например, форму перевернутой пирамиды с плоской вершиной, сообщается с конвейером 108 и наклонной секцией 110 через, например, подвижный элемент 114.
Подвижный элемент 114 включает в себя, например, штифтовую часть 116, выполненную так, чтобы иметь возможность скольжения по наклонной части 110, контейнерную часть 118, выполненную так, чтобы иметь возможность соединения между подвижным элементом 114 и контейнером 112, промежуточную часть 115, выполненную так, чтобы иметь возможность соединения между штифтовой частью 116 и контейнерной частью 118, и конвейерную часть 117, выполненную так, чтобы иметь возможность соединения подвижного элемента 114 с конвейером 108. Промежуточная часть 115 способна перемещаться вертикально по конвейеру 108 в ответ на движение вдоль наклонной секции 110, так что для обеспечения возможности перемещения контейнера 112 между первым положением 119а, в котором контейнер 112 примыкает к конвейеру 108 (например, в ближней части 110ах и перед ней, а также после дальней части 110рх), и вторым положением 119b, в котором контейнер 112 находится на заданном расстоянии от конвейера 108 (например, на дальней части 110рх).
Подвижный элемент 114 может дополнительно включать в себя механизм удаления содержимого контейнера, например, механизм поворота в сторону. Механизм поворота в сторону, который может управляться компьютером, компьютеризированным контроллером и т.п., а также вручную, приводится в действие с использованием, например, удлинителя (не показан), который сталкивается с любой из сторон дна контейнера 112, заставляя его переворачиваться и высвобождать содержимое.
Сортировочный блок 103 дополнительно имеет оптический блок 120, охватывающий по меньшей мере часть площади наклонной секции 110. Оптический блок 120 включает в себя камеру 122, которая представляет собой, например, высокоскоростную камеру на приборах с зарядовой связью (ПЗС), или другую камеру, пригодную для достижения той же цели, и источник 124 света, который представляет собой, например, источник света на светоизлучающих диодах (LED) или другой источник света, пригодный для достижения той же цели. Камера 122 и источник 124 света расположены, например, в верхней части оптического блока 120, над наклонной секцией 110 и соединены с подключенным компьютером 126. Термин "подключенный", используемый в этом описании, охватывает как проводной, так и/или беспроводной каналы связи, так что компьютеры, серверы, компоненты, устройства и т.п. прямо или косвенно находятся в электронной и/или информационной связи один с другим.
Подключенный компьютер 126 дополнительно соединен с разделительным блоком 104. Разделительный блок 104, расположенный, например, после дальней части 110рх, включает в себя одни или несколько ворот, например, трое электромагнитных ворот (не показаны). Каждые электромагнитные ворота представляют собой, например, определенный пол (мужской, женский или нераспознанный пол) и срабатывают в ответ на сигнал, отправленный с подключенного компьютера 126.
Ворота могут иметь дополнительную связь со счетчиком или счетной машиной, чтобы отслеживать количество цыплят, проходящих через каждые ворота. Ворота также могут сообщаться с упаковочной машиной, включающей ящики, пригодные для перевозки цыплят. В каждый ящик помещается заданное количество цыплят, например, 100 цыплят на ящик, чтобы их можно было поставить покупателю.
В ходе работы цыплята поступают в блок 102 разделения и вручную или автоматически помещаются на первый конвейер 106а. Цыплята перемещаются, например, в горизонтальном направлении от первого конвейера 106а к сортировочному блоку 103 через второй конвейер 106b. Второй конвейер 106b работает, например, со скоростью, которая, например, на 10% выше, чем скорость первого конвейера 106а. Разница в скоростях позволяет создать очередь цыплят, что позволяет подавать цыплят в сортировочный блок 103 по одному. Расстояние между каждыми двумя цыплятами в расположении в виде очереди может быть заранее заданным или произвольным.
В сортировочном блоке 103 каждый цыпленок вручную или автоматически помещается в отдельный контейнер 112, расположенный в его первом положении 119а. Затем контейнеры последовательно один за другим перемещаются конвейером 108 с постоянной скоростью к ближней части 110ах наклонной секции 110. Эта скорость, например, равна скорости второго конвейера 106b, что позволяет цыплятам расслабиться и успокоиться (ФИГ. 4А и ФИГ. 5А).
Как только контейнеры достигают ближней части 110ах, штифтовая часть 116 каждого подвижного элемента 114 перемещается по наклонной секции 110 от ближней части 110ах к дальней части 110рх. Это движение заставляет промежуточную часть 115 каждого подвижного элемента 114 перемещаться вертикально относительно конвейера 108, заставляя контейнеры перемещаться из их первого положения 119а во второе положение 119b. Это движение, которое вызывает быстрое изменение высоты контейнера по отношению к конвейеру 108, вызывает инстинктивную реакцию цыплят внутри контейнеров, заставляя их расправлять крылья для сохранения равновесия в ответ на мгновенную потерю ориентации.
Одновременно с перемещением каждого подвижного элемента по маршруту наклонной секции 110 камера 122 получает изображения каждого расправляющего крылья цыпленка внутри каждого контейнера (ФИГ. 4B-4D и ФИГ. 5B-5D). Эти изображения затем передаются на подключенный компьютер 126, который определяет пол цыпленка путем обработки изображений. Обработка изображения происходит, например, в режиме реального времени и включает: отделение пикселей цыпленка от фона, анализ контура цыпленка для выбора изображений цыпленка с расправленными крыльями, извлечение признаков, относящихся к крыльям цыпленка, и определение пола цыпленка по этим признакам.
После дальней части 110рх промежуточная часть 115 каждого подвижного элемента 114 перемещается обратно в исходное положение, заставляя каждый контейнер перемещаться обратно в свое первое положение а119. Конвейер 108 поддерживает движение вперед каждого контейнера 112 с его конвейерной частью 117 по направлению к разделительному блоку 104 в горизонтальном движении. Такое горизонтальное движение позволяет цыпленку внутри каждого контейнера 112 расслабиться, восстановить равновесие, сложить крылья и вернуться в вертикальное положение (ФИГ. 4Е).
Когда каждый контейнер 112 достигает разделительного блока 104, подключенный компьютер 126 передает сигнал в разделительный блок 104. Сигнал приводит к открытию определенных электромагнитных ворот (мужского, женского или нераспознанного пола) в соответствии с полом, определенным в результате обработки изображений.
Как только контейнер 112 достигает предназначенных для него ворот, цыпленок извлекается из контейнера 112 и перемещается через ворота соответствующего пола или вручную, или с помощью поворотного механизма подвижного элемента 114.
В другом варианте осуществления настоящего изобретения наклонная секция 110 расположена в обратном направлении, так что движение контейнера происходит в направлении, обратном движению, описанному выше, от дальней части 110рх к ближней части 110ах. Это движение также вызывает мгновенную потерю ориентации цыплят, что вызывает инстинктивную реакцию цыплят расправить крылья для сохранения равновесия.
Настоящим изобретением также предложена система взвешивания и система обнаружения внешних дефектов тела цыплят для оценивания состояния здоровья цыплят. Эти системы могут быть независимыми или интегрированными в вышеупомянутую систему для распознавания и разделения цыплят по полу на основе узора их крыльев.
ФИГ. 6 представляет собой вид в перспективе системы 130 взвешивания, которая определяет состояние здоровья цыпленка на основе его веса (вес здорового цыпленка составляет более 42-43 г). Система 130 взвешивания включает в себя, например, панель 132, тензодатчик 134, соединенный с процессором (не показан), который дополнительно соединен с подключенным компьютером (не показан), и первый и второй выступы 136а и 136b, которые проходят вверх от плоскости 132 так, чтобы прикрепить панель 132 к поверхности 137. Тензодатчик 134 прямо или косвенно соединен с поверхностью 137, чтобы создать положение 138 взвешивания, в котором считываются показания веса. Положение 138 взвешивания дополнительно включает в себя анкерную часть 142, выполненную так, чтобы прикреплять проверяемого цыпленка к положению взвешивания во время считывания показаний веса.
Система 130 дополнительно включает, например, двое электромагнитных ворот (не показаны), ворота для здоровых цыплят и ворота для нездоровых цыплят, которые расположены после положения 138 взвешивания и соединены с подключенным компьютером.
В процессе работы, когда цыпленок попадает в систему 130 взвешивания, он направляется к положению 138 взвешивания, например, путем его размещения непосредственно на поверхности, которая представляет собой, например, ленточный конвейер, или путем размещения, например, внутри контейнера, который имеет такую же конструкцию и так же работает, как и контейнеры системы 100, описанные выше.
Как только цыпленок достигает положения 138 взвешивания, он прикрепляется или непосредственно, или через штифт 116, к положению 138 взвешивания с помощью анкерной части 142. Это действие позволяет тензодатчику 134 выполнять, например, более ста измерений и передавать их значения в процессор. Процессор идентифицирует "чистые" показания (показания, при которых цыпленок не двигался) и вычисляет среднее значение "чистых" показаний. Затем это значение передается в подключенный компьютер.
Подключенный компьютер сравнивает значение веса, переданное от процессора, с заданным пороговым значением, например, со значением веса 42-43 г, и отправляет сигнал или на ворота для здоровых цыплят (если значение веса равно или выше заданного порогового значения), или на ворота для нездоровых цыплят (если значение веса ниже заданного порогового значения), соответственно, в результате чего выбранные ворота открываются и принимают цыпленка.
Система обнаружения внешних дефектов тела цыплят для оценивания состояния здоровья цыплят включает, например, камеру, предназначенную для получения изображений цыплят, и подключенный компьютер, соединенный с камерой, который выполнен так, чтобы иметь возможность получения изображений, созданных камерой, и оценивания состояния здоровья цыплят путем обработки этих изображений. Цыплят направляют в поле зрения камеры, помещая, например, непосредственно на конвейер, например, ленточный конвейер, или помещая, например, внутрь контейнера, аналогичного по конструкции и принципу действия контейнерам системы 100, описанным выше. Система дополнительно включает в себя, например, двое электромагнитных ворот, ворота для здоровых цыплят и ворота для нездоровых цыплят, которые расположены вне поля зрения камеры и связаны с подключенным компьютером.
В процессе работы, когда каждый цыпленок попадает в поле зрения камеры, камера получает изображения цыпленка и передает их в подключенный компьютер. Подключенный компьютер обрабатывает изображения и выявляет внешние дефекты тела, такие как проблемы с перьями, дефектная голова, повернутая голова, скрещенный клюв и т.п.
Как только обработка изображения будет завершена, и цыпленок выйдет из поля зрения камеры в сторону ворот, подключенный компьютер отправит сигнал или на ворота для здоровых цыплят, или на ворота для нездоровых цыплят, в результате чего выбранные ворота откроются и примут цыпленка.
Хотя изобретение было описано в отношении ограниченного количества вариантов осуществления, следует понимать, что может быть выполнено множество вариаций, модификаций и других применений настоящего изобретения. Таким образом, заявленное изобретение, изложенное в следующей ниже формуле изобретения, не ограничивается описанными здесь вариантами реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЗДОРОВЬЯ И ПОЛА ЦЫПЛЕНКА | 2016 |
|
RU2744172C2 |
| УЗЕЛ ДЛЯ ПЕРЕМЕЩЕНИЯ И РАЗДЕЛЕНИЯ ЖИВЫХ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ПТИЦ | 2020 |
|
RU2830215C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ ДОСТАВКИ ВЕЩЕСТВА ЖИВОТНОМУ | 2016 |
|
RU2736858C2 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА И СПОСОБ ВВЕДЕНИЯ ВЕЩЕСТВА ЖИВОТНОМУ | 2016 |
|
RU2735245C1 |
| СПОСОБ ИНКУБАЦИИ ЯИЦ И ВЫЛУПЛИВАНИЯ ЦЫПЛЯТ, ИНКУБАТОРИЙ И ЛОТОК | 1992 |
|
RU2126203C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИСПОЛЬЗОВАНИЯ В СИСТЕМЕ УПАКОВКИ ПИЩЕВЫХ ПРОДУКТОВ | 2013 |
|
RU2586922C1 |
| СИСТЕМА СОРТИРОВКИ ТОВАРОВ | 2023 |
|
RU2819231C1 |
| ПОДДОН ДЛЯ ИНКУБИРОВАНИЯ ЯИЦ | 2014 |
|
RU2650688C2 |
| ЛОТОК ДЛЯ ЯИЦ ДЛЯ ИНКУБИРОВАНИЯ ЯИЦ И ВЫЛУПЛЕНИЯ ИЗ НИХ ЦЫПЛЯТ | 2015 |
|
RU2684722C2 |
| СРЕДСТВО ДЛЯ ЛЕЧЕНИЯ И ПРОФИЛАКТИКИ ЗАБОЛЕВАНИЙ ЖЕЛУДОЧНО-КИШЕЧНОГО ТРАКТА ПТИЦЫ | 2016 |
|
RU2639544C1 |
Изобретение относится к сельскому хозяйству. Предложена система распознавания и разделения цыплят по полу в соответствии с узором их оперения, которая содержит блок разделения, сортировочный блок, оптический блок и разделительный блок. Система основана на инстинктивной реакции цыплят расправлять крылья для сохранения равновесия в ответ на мгновенную потерю ориентации из-за резкого изменения пространственного движения. Также предложен способ распознавания и разделения цыплят по полу в соответствии с узором их оперения, реализуемый с использованием указанной системы. Изобретение обеспечивает высокую эффективность в процессе эксплуатации. 2 н. и 29 з.п. ф-лы, 14 ил.
1. Система распознавания и разделения цыплят по полу в соответствии с узором их оперения, содержащая:
блок разделения, включающий в себя по меньшей мере один конвейер, простирающийся по меньшей мере частично через упомянутый блок разделения, при этом упомянутый по меньшей мере один конвейер выполнен управляемым компьютеризированным контроллером и так, чтобы поддерживать путь перемещения вперед множества цыплят в очереди;
сортировочный блок, выполненный так, чтобы принимать упомянутое множество цыплят в очереди, при этом упомянутый сортировочный блок включает в себя:
по меньшей мере один второй конвейер, простирающийся по меньшей мере частично через упомянутый сортировочный блок, выполненный так, чтобы поддерживать путь перемещения вперед; и
по меньшей мере один контейнер, сообщающийся с упомянутым по меньшей мере одним вторым конвейером так, что упомянутый по меньшей мере один контейнер перемещается вверх между первым положением и вторым положением, когда в нем содержится по меньшей мере один цыпленок из упомянутого множества цыплят, так чтобы стимулировать самостоятельное расправление цыплятами крыльев, тем самым делая возможным выявление разницы между полами цыплят;
оптический блок, включающий в себя камеру, выполненную так, чтобы захватывать по меньшей мере одно изображение упомянутого расправившего крылья цыпленка когда упомянутый по меньшей мере один контейнер перемещается между упомянутым первым положением и упомянутым вторым положением, с последующей передачей упомянутого по меньшей мере одного изображения для обработки изображения для определения пола упомянутого по меньшей мере одного цыпленка, при этом обработка изображения происходит в режиме реального времени и включает отделение пикселей цыпленка от фона, анализ контура цыпленка для выбора изображений цыпленка с расправленными крыльями, идентификацию признаков, относящихся к крыльям, и определение пола цыпленка по этим признакам; и
разделительный блок, управляемый упомянутым компьютеризированным контроллером и выполненный с возможностью физического разделения упомянутого множества цыплят на основе упомянутого определения пола;
при этом упомянутый по меньшей мере один второй конвейер поддерживает движение вперед каждого из упомянутых по меньшей мере одного контейнера от сортировочного блока к разделительному блоку в горизонтальном движении, при этом каждый контейнер имеет размеры, подходящие для того, чтобы цыпленок сложил свои крылья во время горизонтального движения между сортировочным блоком и разделительным блоком.
2. Система по п. 1, отличающаяся тем, что упомянутый по меньшей мере один контейнер сообщается с упомянутым по меньшей мере одним конвейером через подвижный элемент.
3. Система по п. 2, отличающаяся тем, что упомянутое перемещение упомянутого по меньшей мере одного контейнера между упомянутым первым положением и упомянутым вторым положением достигается за счет перемещения штифтовой части упомянутого подвижного элемента вдоль наклонной секции.
4. Система по п. 3, отличающаяся тем, что одновременно с перемещением упомянутого по меньшей мере одного контейнера между упомянутым первым положением и упомянутым вторым положением промежуточная часть упомянутого подвижного элемента может вертикально перемещаться вдоль упомянутого по меньшей мере одного конвейера.
5. Система по п. 2, отличающаяся тем, что упомянутый подвижный элемент управляется компьютеризированным контроллером.
6. Система по п. 2, отличающаяся тем, что упомянутый подвижный элемент включает в себя механизм поворота в сторону, предназначенный для обеспечения возможности удаления содержимого контейнера.
7. Система по п. 6, отличающаяся тем, что упомянутый механизм поворота в сторону управляется компьютеризированным контроллером.
8. Система по п. 3, дополнительно включающая в себя компьютеризированный контроллер, выполненный так, чтобы управлять упомянутым по меньшей мере одним конвейером и упомянутой камерой.
9. Система по п. 8, отличающаяся тем, что упомянутый по меньшей мере один конвейер представляет собой один из следующих: ленточный конвейер, U-образный ленточный конвейер, цепной конвейер, приводной роликовый конвейер или их комбинацию.
10. Система по п. 3, отличающаяся тем, что упомянутый по меньшей мере один контейнер имеет форму перевернутой пирамиды с плоской вершиной.
11. Система по п. 3, отличающаяся тем, что упомянутая камера представляет собой высокоскоростную камеру на приборах с зарядовой связью (ПЗС).
12. Система по п. 3, отличающаяся тем, что упомянутый оптический блок дополнительно включает источник света.
13. Система по п. 12, отличающаяся тем, что упомянутый источник света представляет собой светодиодный (LED) источник света.
14. Система по п. 12, отличающаяся тем, что упомянутый источник света управляется компьютеризированным контроллером.
15. Система по п. 3, отличающаяся тем, что упомянутый разделительный блок включает в себя по меньшей мере одни ворота, предназначенные для приема упомянутого по меньшей мере одного цыпленка из упомянутого по меньшей мере одного контейнера.
16. Система по п. 15, отличающаяся тем, что упомянутый разделительный блок управляется компьютеризированным контроллером.
17. Система по п. 15, дополнительно включающая в себя счетную машину, предназначенную для контроля количества цыплят, проходящих через упомянутые по меньшей мере одни ворота.
18. Система по п. 17, отличающаяся тем, что упомянутая счетная машина управляется компьютеризированным контроллером.
19. Система по п. 17, дополнительно включающая в себя упаковочную машину, предназначенную для приема цыплят из упомянутых по меньшей мере одних ворот и их упаковки в ящики, пригодные для транспортировки цыплят.
20. Система по п. 19, отличающаяся тем, что упомянутая упаковочная машина управляется компьютеризированным контроллером.
21. Система по п. 1, отличающаяся тем, что упомянутое одно или несколько изображений дополнительно используются для обнаружения дефектов тела у упомянутого по меньшей мере одного цыпленка.
22. Система по п. 3, дополнительно включающая в себя блок взвешивания, соединенный с упомянутым по меньшей мере одним конвейером упомянутого сортировочного блока, при этом упомянутый блок взвешивания включает в себя тензодатчик, предназначенный для выполнения множества измерений веса упомянутого по меньшей мере одного цыпленка, когда упомянутый контейнер достигает его, чтобы определить состояние здоровья упомянутого по меньшей мере одного цыпленка на основе его веса.
23. Система по п. 22, отличающаяся тем, что упомянутый блок взвешивания управляется компьютеризированным контроллером.
24. Система по п. 22, отличающаяся тем, что упомянутый тензодатчик соединен с процессором, предназначенным для вычисления фактического веса упомянутого по меньшей мере одного цыпленка.
25. Способ распознавания и разделения цыплят по полу в соответствии с узором их оперения, который включает:
обеспечение наличия системы по п. 1;
размещение упомянутых цыплят вдоль первого пути для обеспечения движения упомянутого множества цыплят в очереди;
размещение каждого из упомянутого множества цыплят в очереди в упомянутом контейнере, при этом упомянутый контейнер размещают вдоль второго пути так, чтобы вызвать перемещение упомянутого контейнера между первым положением и вторым положением, что вынудит каждого из упомянутого множества цыплят расправить свои крылья;
захватывание одного или большего количества изображений крыльев упомянутого каждого из упомянутого множества цыплят, когда упомянутый контейнер перемещается между упомянутым первым положением и упомянутым вторым положением; и
обработку упомянутого одного или большего количества изображений крыльев упомянутого по меньшей мере одного цыпленка для определения его пола.
26. Способ по п. 25, отличающийся тем, что упомянутое перемещение упомянутого контейнера между упомянутым первым положением и упомянутым вторым положением включает проход по наклонной секции.
27. Способ по п. 25, дополнительно включающий сортировку упомянутых цыплят по их полу.
28. Способ по п. 27, дополнительно включающий подсчет упомянутых цыплят каждого пола.
29. Способ по п. 26, отличающийся тем, что упомянутое одно или несколько изображений упомянутого цыпленка дополнительно используют для выявления дефектов тела.
30. Способ по п. 29, отличающийся тем, что упомянутые дефекты тела представляют собой один из следующих дефектов: проблемы с перьями, дефектная голова, повернутая голова, скрещенный клюв и их комбинация.
31. Способ по п. 26, дополнительно включающий:
выполнение множества считываний значений взвешивания каждого из упомянутого множества цыплят по мере того, как упомянутый контейнер достигает назначенного места на упомянутом втором пути; и
подсчет среднего значения упомянутого множества значений считывания взвешивания для определения веса каждого из упомянутого множества цыплят и тем самым определения состояния их здоровья.
| US 20010030146 A1, 18.10.2001 | |||
| US 20180353081 A1, 13.12.2018 | |||
| RU 94019780 A1, 20.08.1996 | |||
| УСТРОЙСТВО ДЛЯ СОРТИРОВКИ ЦЫПЛЯТ ПО ПОЛУ | 1967 |
|
SU222799A1 |
| Способ разделения по полу цыплят-бройлеров | 1990 |
|
SU1789154A1 |
| Устройство для перекрытия газопровода | 1983 |
|
SU1190125A1 |

