Изобретение относится к электросвязи и может,использоваться в технике передачи данных.
Известно устррйство адаптивного приема дискретных сигналов, содержащее блок демодуляции, низкочастотный фильтр, адаптивный корректор, дополнительную линию задержки, два стробирующих устройства, процессор, осуществляющий рекуррентную нелинейную операцию вынесения решения о принятой последовательности символов в целом по критерию максимального правдоподобия, две линии задержки, сумматор, блок адаптивной индентификации импульсной характеристики канала связи, первый, второй, третий и четвертый блоки вычисления ошибки, генератор тактового колебания .
Недостаток известного устройства состоит в том, что наличие задержки, вызванной вЬшесением решения в целом о принятой последовательности символов при адаптивной подстройке фазы опорного колебания, коэффициентов адаптивного корректора и фазы татового колебания прйврдит к потере помехоустойчивости при наличии в канале селективных по частоте замираний.
Наиболее близким по технической сущности к предлагаемому является усройство адаптивной обработки дискретных сигналов, содержащее декодер и последовательно соединенные автома тический регулятор уровня, фильтр, фазовращатель, аналого-цифровой преобразователь, адаптивный корректор, .блок демодуляции, блок поэлементного вынесения решения и первый блок вычисления ошибок, при зтом выход фильтра подключен к второму информационному входу аналого-цифрового преобразователя, первый и второй управляющие входы которого соединены с управляющими выходами соответственно блока демодуляции и гщаптив,ного корректора, второй управляющий выход которого подключен к управляющему входу автоматического регулятора уровня, а выход блока демодуляции подключен к второму входу первого блока вычисления ошибкиХ2.
Недостатком данного устройства является то, что наличие в канале связи амплитудно-частотных искажений приводит к потере помехоустойчивости при линейном методе обработки
принятого сигнала и поэлементном правиле вынесения решения о принятом символе.
Цель изобретения - повьшгение помехоустойчивости приема дискретных сигналов при селективных по частоте замираниях.
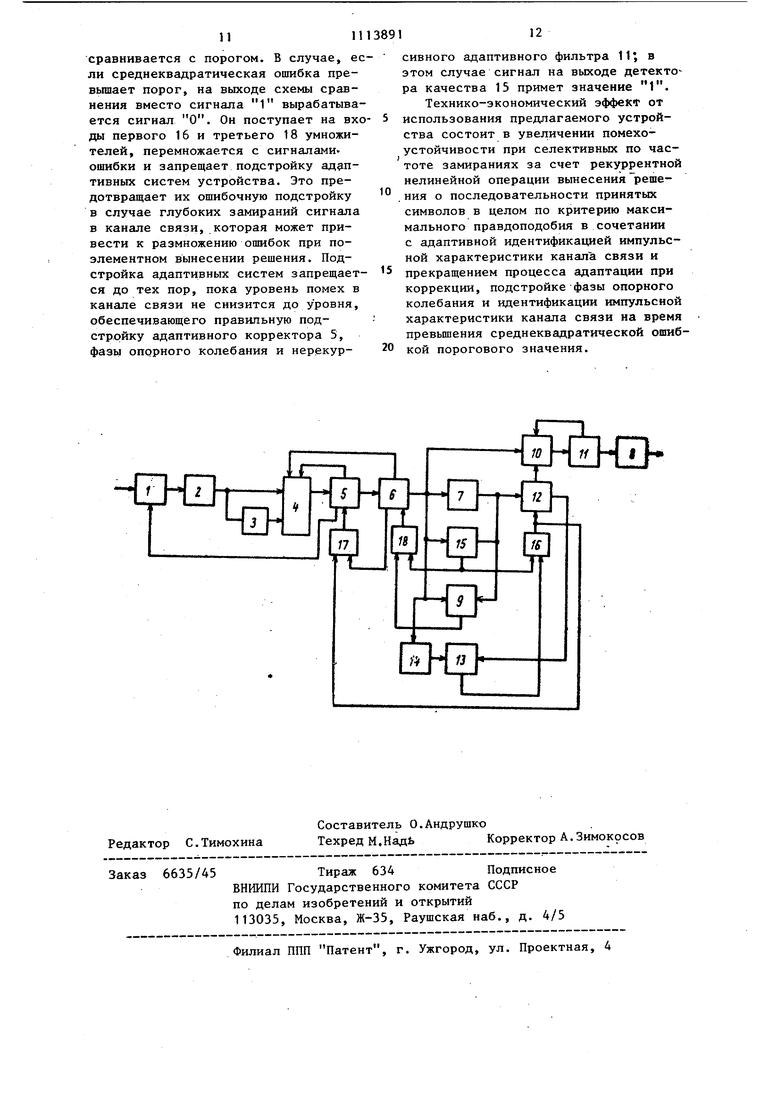
Для достижения указанной цели в устройство адаптивного приема дискретных сигналов, содержащее декодер и последовательно включенные автоматический регулятор уровня, фильтр, фазовращатель, аналого-цифровой преобразователь, адаптивный корректор, блок демодуляции, блок поэлементного вынесения решения и первый блок вычисления ошибки, при этом выход фильтра подключен к второму информационному входу аналого-цифрового преобразователя, первый и второ управляющие входы которого соединены с управляющими выходами соответственно блока демодуляции и адаптивного корректора, второй управляющий выход которого подключен к управляющему входу автоматического регулятора уровня, а выход блока демодуляции подключен к второму входу первого блока вычисления ошибки, введены линия задержки, последовательно соединенные нерекурсивный адаптивный фильтр, второй блок вычисления ошибки, первый умножитель и второй умножитель, последовательно соединенные третий блок вычисления ошибки и блок вынесения решения в целом, последовательно соединенные детектор качества и третий умножитель, причем выход блока демодуляции подключен к первым входам третьего блока вычисления ошибки и детектора качества непосредственно, а к второму входу второго блока вычисления ошибки - через линию задержки, выход блока поэлементного вынесения решения подключен к информационному входу нерекурсивного адаптивного фильтра и к второму входу детектора качества, выход которого подключен к второму входу первого умножителя, выход которого подключен к управлякяцему входу нерекурсивного адаптивн&го фильтра, второй выход которого подключен к второму входу третьего блока вычисления ошибки, первый и второй блока вынесения решения в целом подключены соответственно к входу декодера и к третьему входу третьего блока вычисления ошибки, второй вход и выход третьего умножителя соединены соотве ственно с выходом первого блока вычисления ошибки и со вторым входом блока демодуляции, второй управляющий выход которого подключен к второму входу второго умножителя, выход которого подключен к управляющему входу адаптивного корректора. На чертеже представлена структурная электрическая схема предложенного устройства. Устройство адаптивного приема дискретных сигналов содержит автоматический регулятор уровня 1, фильтр фазовращатель 3, аналого-цифровой преобразователь А, адаптивный корректор 5, блок демодуляции 6, блок поэлементного вынесения решения 7, декодер 8, первый блок вычисления ошибки 9, блок вынесения решения в целом 10, нерекурсивный адаптивный фильтр 11, второй блок вычисления ошибки 12, третий блок вычисления ошибки 13, линию задержки 14, детек тор качества первый умножитель 16, второй умножитель 17 и третий умножитель 18. Устройство работает следующим об разом. Принятый сигнал поступает на вход автоматического регулятора уровня 1 для управления которым используется значение коэффициента усиления центрального отвода линии задержки адаптивного корректора 5. Это позво ляет осуществлять точную регулировк уровня принимаемого сигнала по критерию минимума среднеквадратической ошибки. Затем принятый сигнал фильтруют. С помощью фазовращателя 3 образуют квддратурный подканал. Сигналы синфазного и квадратурного подканалов стробируют и преобразуют в цифровую форму в аналого-цифровом преобразов теле 4. Управляют фазой момента стробирования с учетом импульсной характеристики адаптивного корректо оа 5 и знака опорного колебания в соответствии с выражением J(jHbL(jUu,i: co5(( , и ь (О где Т) фаза момента стробирова в -м такте л-: - весовой коэффициент; ot-i - коэффициент пропорциональности равный О при Х5-1 и 1 при г -1 Ci коэффициент усиления Т. -го регулятора адаптивного корректора 5 (я)о- циклическая частота опорного колебания, Р - величина расхождения фаз несущего и опорного колебаний; Т - величина единичного интервала (такта). Далее сигнал подвергается коррекции адаптивном корректоре 5, который редставляет из себя адаптивный нереурсивный фильтр, настраиваемый по ритерию минимума среднеквадратичесой ошибки. Он реализован на линии адержки с отводами, расположенными ерез интервалы равные Т/2. Регулятоы адаптивного корректора 5 выполнены а умножителях. Коэффициент усилеия 1-го-регулятора определяется роизведением выборки принятого сигала, поступающей с i -го отвода инии задержки, и сигнала ошибки, бщего для всех регуляторов, и опрееляется выражением Ci(S hC;ijHu7,, где - комплексный коэффициент усиления i-го регулятора на i -м такте, 5t(0 отсчет сигнала ошибки на управляющем входе адаптивного корректора 5, )t(L) - отсчет сигнала в i -м отводе линии задержки адаптивного корректора 5 на ь -м такте, ukT - весовой коэффициент. Сигналы с выходов -регуляторов адаптивного корректора 5 объединяются в су| маторе и поступают для дальнейшей обработки в блок демодуляции 6 качания фазы несущего колебания. В блоке демодуляции 6 осуществляется перенос принятого сигнала в полосу частот эквивалентного низкочастотного канала и компенсируются искажения, обусловленные расхозкдением частот и фаз несущего и опорного колебаний, а также качанием фазы несущего колебания (фазовым джиттером), Для этого подстраивают фазу опорного колебания, используемого для демодуляции, в соответствии с выражением U«)9tiuLcpUy-4 iH :)mLe-(i) a(j)(i-0l (3 где LV) - оценка фазы -несущего колебания на а -м такте-, С() - отсчет сигнала на выходе блока поэлементного вынесения решения 7 в g-м тактеi весовые коэффициенты разность сигналов на выхо де блока демодуляции. 6 и выходе блока поэлементно го вынесения решения 7. Выражение описывает работу цифровой системы фазовой автоподстройки частоты второго порядка. Ис пользование для подстройки фазы опо ного колебания выходного сигнала блока поэлементного вынесения решения 7 позволяет оперативно отслеживать качание фазы несущего колебания и успешно его компенсирбвать для достижения когерентной демодуля ции, С выхода блока демодуляции 6 при тый сигнал поступает в блок поэлеме ного вынесения решения 7. Здесь он сравнивается с эталонными значения ми передаваемого сигнала, С приняты сигналом сопоставляется наиболее близ кий ему эталонный сигнал и далее этот эталонный сигнал поступает на выход блока поэлементного вынесения решения 7. Этот процесс эквивалентен сопоставлению каждого прин того сигнала с соответствующим пер данным символом, поскольку на передающей стороне имеется однозначно соответствие передаваемого сигнала информационному символу. С входа и выхода блока поэлемент ного вынесения решения 7 сигналы поступают в первый блок вычисления ошибки 9, включающий в себя суммато и умножитель. Здесь осуществляется вычисление сигнала ошибки, необходимого для подстройки фазы колебания последних слагаемых в уравнении (3). С выхода блока поэлементного вынесения решения 7 сигнал поступает также на вход нерекурсивного адаптивного фильтра 11. Этот блок в совокупности с вторым блоком вычи ления ошибки 12 и блоком поэлементного вынесения решения 7 образует си тему адаптивной индентификации импульсной характеристики канала связи. Она осуществляет моделирование импульсной характеристики четырехполюсника, нули Коэффициента передачи которого в частотной области совпадают с нулями коэффициента передачи канала связи. Стру1 ;тура нерекурсивного адаптивного фильтра 11 аналогична структуре адаптивного корректора 5 за исключением того, что отводы линии задержки расположены через определенные интервалы. Коэффициенты усиления в отводах линии задержки нерекурсивного адаптивного фильтра 11 подстраиваются стахостически по критерию минимума среднеквадратической ошибки в соответствии с выражением ((jia(i, (4V где - комплексный коэффициент усиления 2. -го регулятора нерекурсивного адаптивного фильтра 11 на такте, отсчет сигнала ошибки на управляющем входе адаптивного нерекурсивного фильтра 11, отсчет сигнала в i -м отводе линии задержки нерекурсивного фильтра 11 на 3 -м тактеj весовой коэффициент. Второй блок вычисления ошибки 12 представляет собой сумматор, который, используя задержанный линией задержки 14 сигнал с выхода блока демодуляции 6 и сигнал с выхода нерекурсивного адаптивного фильтра 11, вычисляет сигнал ошибки, необходимьй для постройки адаптивного корректора 5 и нерекурсивного адаптивного фильтра 11. Введение линии задержки 14 в цепь демодулированного сигнала обусловлено необходимостью выравнивания задержки сигналов, поданных во второй блок вычисления ошибки 12 из нерекурсивного адаптивного фильтра 11 и блока демодуляции 6. Эта задержка обусловлена задержкой, вносимой схемой нерекурсивного адаптивного фильтра 11 . Она оценивается как половина интервала времени, на который рассчитана линия задержки некурсивного- адаптивного фильтра 11. Сигнал ошибки для подстройки адаптивного нерекурсивного фильтра формируется в соответствии с выраже ,ем .ls1 i-K2biw где D (-j - отсчет сигнала на выходе блока демодуляции 6, Сигнал ошибки из второго блока вычисления ошибки 12 поступает на вход нерекурсивного адаптивного фильтра 11 через первый умножитель с выхода которого он также поступает на первый вход второго умножителя 17. Во втором умножителе 17 формируется сигнал ошибки, необходимый для подстройки адаптивного корректора 5 в соответствд1и с выражениемад)е,.0 где .1 оценка фазы несущего коле бания; t - оценка фазы тактового кол бания. Наличие в канале.связи с селекти ными по частоте замираниями искажениями, вызванными значительной нера номерностью амплитудно-частотной ха рактеристики в рабочей полосе частот, не позволяет при поэлементном правиле вынесения решения о принятом символе реализовать помехоустой чивость, близкую к потенциальной. Для реализации такой помехоустойчивости целесообразно ввести в устрой ство систему вынесения решения о пр нятой последовательности символов в целом по критерию максимального правдоподобия, которая состоит из третьего блока вычисления ошибки 13 и блока вынесения решения в целом 1 Сигнал на выходе блока вынесения решения в целом 10 появляется с значительной задержкой и его нецеле сообразно использовать для управления адаптивным корректором 5, бло ком демодуляции 6 и нерекурсивным адаптивным фильтром 11, так как при этом невозможно оперативно отсл живать изменение частотных характеристик канала, частоты, фазы и дрожания фазы несущего колебания. Поэлементно вынесенное решение о при нятом символе содержит достато 1ную статистику для подстройки адаптивных систем устройства даже при весь ,значительных линейных искажениях в канале связи. Удовлетворительная подстройка адаптивного корректора 5, фазы опорного колебания и нерекурсивного адаптивного фильтра 11 возможна при вероятности ошибки при поэлементом вынесении решения порядка 1,5-10 Поскольку система вынесения решения о принятой последовательности символов, в целом по критерию макси мального правдоподобия в совокупности с системой адаптивной идентификации импульсной характеристики канала свя зи ориентирована на компенсацию искажений, вносимых нулями коэффициента передачи канала связи, то задачей адаптивного корректора 5 является сведение частотной характеристики сквозного тракта передачи к частотной характеристике нерекурсивного адаптивного фильтра 11. Это достигается подстройкой коэффициентов адаптивного корректора 5 в соответствии с выражениями (2), (6) и (5). Рекуррентная нелинейная процедура вынесения решения о приятной последовательности символов в целом по критерию максимального правдоподобия базируется на представлении системы передачи сигнала данных в виде систем с конечным числом состояний, характеризуемых векторами Oj на j -м такте. В качестве вектора состояния целесообразно, выбрать вектор i Caj.n-.. ,, где O(t. - отсчет информационного сиг-. нала, разрешенного к передаче-, ot - число ненулевых отсчетов импульсной характеристики сквозного тракта передачи сигнала данных. Число различных векторов состояния равно J , где jx - размерность алфавита информационных символов. Переход системы из состояния в состояние -3 характеризуется целевой функцией j(.4l4Vr|o e«i-er- 8) в соотзетствии с принципом оптимальности, начиная с J, для j 1,2,... N решается функциональное уравнение вида 3j% t i- i Hi-| e-l-ef 1 где оценка целевой функции о З ,-.... , . ..1 каждого из ju воэ можных векторов состоянии Суть данного метода вынесения решения заключается в моделировании на основании наблюдения последователь ности отсчетов демодулированного сигнала (i(:j) процесса смены состояний в модели, описываемой уравнением ,eOi-e ej , С101 б последовательность отсчетов некорректированного гауссовского шума на i м такте. При этом на каждом такте определяются по критерию максимального правдоподобия не сами переданные сиг налы, а по одному наиболее вероятному переходу в каждое состояние. Менее вероятные переходы в конкретное состояние отбрасываются. Результаты вычислений формируют граф переходов из состояния в состояние. Путем анализа последовательности состо яний, через которые проходит граф пере ходов, соединяющий начальное и конечное состояния, нетрудно определить последовательность сигналов (дЛ а значит, и переданную последователь ность информационных символов. В третьем блоке вычисления ошибки 13 осуществляется вычисление оценок целевой функции ) в со ответствии с выражением (10) для каждого из возможных переходов и выбо наиболее вероятного из них. Для выполнения этой операции в состав третье го блока вычислений ошибки 13 введен схем вычисления оценок целевой функции. Основу каждой из этих схем составляет линия задержки, в которую заносятся компоненты вектора . С выходов отводов линии задержки информационные сигналы поступают через умножитель на коэффициенты е в сумматор, где формируется значение сигнала равного .ctfl- . Затем /о J С помо1Ц1 ю последовательно соединенных сумматора, квадратора и накапливающего сумматора с регистром для хранения значения целевой функции, в численного для данного вектора состояния на предыдущем такте, осуществ 1 1.10 ляется вычисление 3 (-j-и . Вычисленные значения целевой функции затем сравниваются и результат сравнения передается в блок вынесения решения в целом 10. Операция выполняется последовательно для всех возможных значений d-j-i , которые поступают из постоянного запоминающего устройства эталонных сигналов блока вынесения решения в целом 10 в схемы вычисления оценок целевой функции под управлением построителя графа, находящегося в блоке вынесения решения в целом 10. Схема сравнения блока вынесения решения в целом 10 управляет также записью в буферные регистры схем вычисления оценок целевой-функции значений Qj , соответствующих минимальной основании сравнения значений оценок целевой функции, вычисленных в третьем блоке вычисления ошибки 13, в сопоставлении с последовательностью . перебора значений Oj в блоке вынесения решения в целом 10 осуществляется построение графа переходов и занесение его в соответствующую линию задержки блока вынесения решения в целом 10. С определенным видом переходов на каждом единичном интервале в построителе графа блока вынесения решения в целом 10 сопоставляется определенная кодовая комбинация, записываемая затем в линию задержки графа переходов. Дешифратор графа этого блока, анализируя последовательность таких кодовых комбинаций, поступающих с выходов линии задержки графа переходов, определяет оптимальньш путь и выдает на йход блока вынесения решения в целом 10 соответствующую последовательность информационных символов. В декодере 8 осуществляются необходимые операции по снятию относительности с информационных символов и преобразование их в код, в котором информация поступает потребителю. В устройство введен также детектор качества 15, состоящий из сумматора квадратора, усреднителя и схемы сравнения. На входы сумматора поступают сигналы с выходов блока демодуляции 6 и блока поэлементного вынесения решения 7. Полученный на выходе сумматора сигнал возводится в квадрат и усредняется. Затем полученное значение среднеквадратической ошибки сравнивается с порогом. В случае, ес ли среднеквадратическая ошибка превьппает порог, на выходе схемы сравнения вместо сигнала 1 вырабатывается сигнал О. Он поступает на вхо ды первого 16 и третьего 18 умножителей, перемножается с сигналамиошибки и запрещает подстройку адаптивных систем устройства. Это предотвращает их ошибочную подстройку в случае глубоких замираний сигнала в канале связи, которая может привести к размножению ошибок при поэлементном вынесении решения. Подстройка адаптивных систем запрещается до тех пор, пока уровень помех в канале связи не снизится до Уровня, обеспечивающего правильную подстройку адаптивного корректора 5, фазы опорного колебания и нерекур11сивного адаптивного фильтра 11, в этом случае сигнал на выходе детекто ра качества 15 примет значение 1. Технико-экономический эффект от использования предлагаемого устройства состоит в увеличении помехоустойчивости при селективных по частоте замираниях за счет рекуррентной нелинейной операции вынесения решения о последовательности принятых символов в целом по критерию максимального правдоподобия в сочетании с адаптивной идентификацией импульсной характеристики канала связи и прекращением процесса адаптации при коррекции, подстройке фазы опорного колебания и идентификации импульсной характеристики канала связи на время превьштения среднеквадратической ошибкой порогового значения.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адаптивного приема дискретных сигналов | 1982 |
|
SU1083396A1 |
| Способ адаптивной обработки дискретных сигналов и устройство для его осуществления | 1979 |
|
SU886258A2 |
| Устройство адаптивного приема дискретных сигналов | 1990 |
|
SU1807569A1 |
| Устройство для адаптивного приема цифровых однополосных сигналов | 1989 |
|
SU1663776A2 |
| Устройство для приема дискретных сигналов | 1986 |
|
SU1374444A1 |
| Устройство адаптивного приема дискретных сигналов с амплитудно-фазовой модуляцией | 1986 |
|
SU1309319A1 |
| Устройство приема дискретных сигналов с относительно-фазовой модуляцией низкой кратности | 1987 |
|
SU1467786A1 |
| Устройство адаптивной обработки дискретных сигналов | 1982 |
|
SU1116542A2 |
| ЦИФРОВОЙ АДАПТИВНЫЙ ПРИЕМНИК ДИСКРЕТНЫХ СИГНАЛОВ | 1991 |
|
RU2039416C1 |
| Устройство приема дискретных сигналов | 1984 |
|
SU1223371A1 |
УСТРОЙСТВО АДАПТИВНОГО ПРИЕМА ДИСКРЕТНЫХ СИГНАЛОВ, содержащее декодер и последовательно соединенные автоматический регулятор уровня, фильтр, фазовращатель, аналого-цифровой преобразователь, адаптивный корректор, блок демодуляции, блок поэлементного вынесения решения и первый блок вычисления ошибки, при этом выход фильтра подключен к второму информационному входу аналогоцифрового преобразователя, первый и второй управляющие входы которого соединены, с управляющими выходами соответственно блока демодуляции и адаптивного корректора, второй управляющий выход которого подключен к управляющему входу автоматического регулятора уровня, а выход блока демодуляции подключен к второму входу первого блока вычисления ошибки, отличающееся тем, что, с целью повьш1ения помехоустойчивости I при селективных по частоте замираниях, в него введены линия задержки, последовательно соединенные нерекурсивный адаптивной фильтр, второй блок вычисления ошибки, первый умножитель и второй умножитель, последовательно соединенные третий блок вычисления ошибки и блок вынесения решения в целом, последовательно соединенные детектор качества и третий умножитель, причем выход блока демодуляции подключен к первым входам третьего блока вычисления ошибки и детектора качества непосредственно, а к второму входу второго блока вычисления ошибки - через линию задерж ки, выход блока поэлементного вынесения решения подключен к информацион(Л ному входу нерекурсивного адаптивного фильтра и к второму входу детектора качества, выход которого подключен к второму входу первого умножителя, выход которого подключен к управляющему входу нерекурсивного адаптивного фильтра, второй выход которого подключен к второму входу со третьего блока вычисления ошибки, 00 первый и второй выходы блока вынесесо ния решения в целом подключены соответственно к входу декодера и к третьему входу третьего блока вычисления ошибки, второй вход и выход третьего умножителя соединены соответственно с выходом первого блоха вычисления ошибки и со вторым входом блока демодуляции, второй управляющий выход которого подключен к второму входу второго умножителя, выход которого подключен к управляющему входу адаптивного корректора.
сн
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| JEEE Tranzaction on Communication Technology,, voI COMr-22, № 5, 1974, p.p.624-625 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ адаптивной обработкидиКСРЕТНыХ СигНАлОВ и уСТРОйСТВОдля ЕгО ОСущЕСТВлЕНия | 1978 |
|
SU832731A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
