Изобретение относится к устройствам для измерения с использованием беспилотных летательных аппаратов (БПЛА) характеристик электромагнитного поля, создаваемого совокупностью источников электромагнитного излучения, в частности может быть использовано для измерения параметров радиосигналов пространственно-распределенных систем (ПРС) радиопередатчиков (РПД), одновременно излучающих на единой рабочей частоте некогерентные специальные сигналы с одинаковой шириной спектра.
Известно устройство измерения параметров направленности передающей антенны, размещенное на БПЛА [1], состоящее из бортовой антенны, перестраиваемого полосового фильтра, широкополосного измерителя мощности, бортового приемника сигналов ГНСС, бортового накопителя информации, гироскопического датчика, датчика-компаса, имеющих между собой связи: выход бортовой антенны соединен с входом перестраиваемого полосового фильтра, выход которого соединен с входом широкополосного измерителя мощности, выход которого соединен с одним из входов бортового накопителя, выход гироскопического датчика соединен с другим входом накопителя информации, выход бортового приемника сигналов ГНСС соединен с третьим входом накопителя информации, выход датчика-компаса соединен с четвертым входом накопителя информации, обеспечивающее:
1) измерение уровня мощности принимаемого сигнала на борту БПЛА с помощью радиотехнического блока, состоящего из последовательно соединенных приемной антенны, перестраиваемого полосового фильтра, заблаговременно настроенного на пропускание сигнала с заданной несущей частотой и шириной спектра, и широкополосного измерителя мощности;
2) определение координат местоположения БПЛА и момента времени измерения в заданной точке маршрута с помощью приемника ГНСС, обеспечивающего прием не только сигналов ГНСС, но и дифференциальных поправок от контрольно-корректирующей станции (ККС) в интересах повышения точности координатно-временных определений;
3) определение углового положения бортовой антенны относительно исследуемой путем измерения угловой ориентации БПЛА в пространстве (углы курса, крена, тангажа и рыскания) с использованием датчика-компаса и гироскопического датчика;
4) фиксацию результатов измерения уровня принимаемого сигнала и результатов определения угловой ориентации БПЛА в пространстве, привязанных к шкале времени и координатам точки измерения с использованием бортового накопителя информации для последующей постобработки (отложенной обработки после посадки БПЛА) с использованием наземного информационно-вычислительного комплекса.
Недостатком данного устройства-прототипа является невозможность измерения в заданной точке рабочего пространства амплитуды каждого из некогерентных парциальных сигналов с одинаковой шириной спектра, создаваемых РПД из состава ПРС РПД при их одновременном функционировании на единой рабочей частоте.
Технический результат изобретения состоит в обеспечении возможности измерения в заданной точке рабочего пространства не только суммарной мощности совокупности всех некогерентных сигналов ПРС РПД, но и амплитуды каждого из некогерентных парциальных сигналов РПД, входящих в состав ПРС РПД.
Технический результат измерений достигается тем, что в устройство-прототип дополнительно введены блок пространственного разделения сигналов, блок расчета направлений, блок управления и съемный защищенный машинный носитель информации, использованы М бортовых антенн, М перестраиваемых полосовых фильтров, в которые введен дополнительный вход, в бортовой накопитель информации дополнительно введены N входов, М>N, имеющие следующие связи между собой. Съемный защищенный машинный носитель информации через разъем Х1 соединен с входом блока управления, один выход блока управления соединен с одним из входов блока пространственного разделения сигналов, другой многоканальный выход блока управления соединен с многоканальным входом блока расчета направлений, а третий выход блока управления соединен с дополнительными входами M перестраиваемых полосовых фильтров, входы которых соединены с выходами соответствующих М бортовых антенн, а выходы M перестраиваемых полосовых фильтров соединены с М входами блока пространственного разделения сигналов, выход одного из М перестраиваемых полосовых фильтров дополнительно соединен с входом широкополосного измерителя мощности, один из входов блока расчета направлений соединен с выходом приемника ГНСС, другой его вход соединен с выходом датчика-компаса, а его N выходов соединены с N входами блока пространственного разделения сигналов, N выходов блока пространственного разделения сигналов соединены с N входами бортового накопителя информации, n=1, 2, …, N.
При этом блок пространственного разделения сигналов состоит из гетеродина, М преобразователей частоты, М аналого-цифровых преобразователей, М квадратурных преобразователей частоты, блока разделения сигналов и N устройств оценки амплитуды сигналов, имеющих следующие связи между собой. Вход гетеродина является одним из входов блока пространственного разделения сигналов и соединен с одним из выходов блока управления, выход гетеродина соединен с одним из входов каждого из М преобразователей частоты, у которых другие входы являются М входами блока пространственного разделения сигналов и соединены с соответствующими выходами М перестраиваемых полосовых фильтров, выходы М преобразователей частоты соединены с соответствующими входами М аналого-цифровых преобразователей, М выходов которых соединены с соответствующими входами М квадратурных преобразователей частоты, выходы М квадратурных преобразователей частоты соединены с соответствующими М входами блока разделения сигналов, другие N входов которого являются N входами блока пространственного разделения сигналов и соединены с соответствующими N выходами блока расчета направлений, а N выходов блока разделения сигналов соединены с соответствующими входами N устройств оценки амплитуды сигналов, выходы которых являются N выходами блока пространственного разделения сигналов и соединены с соответствующими N входами бортового накопителя информации.
Существо изобретения поясняется рисунками.
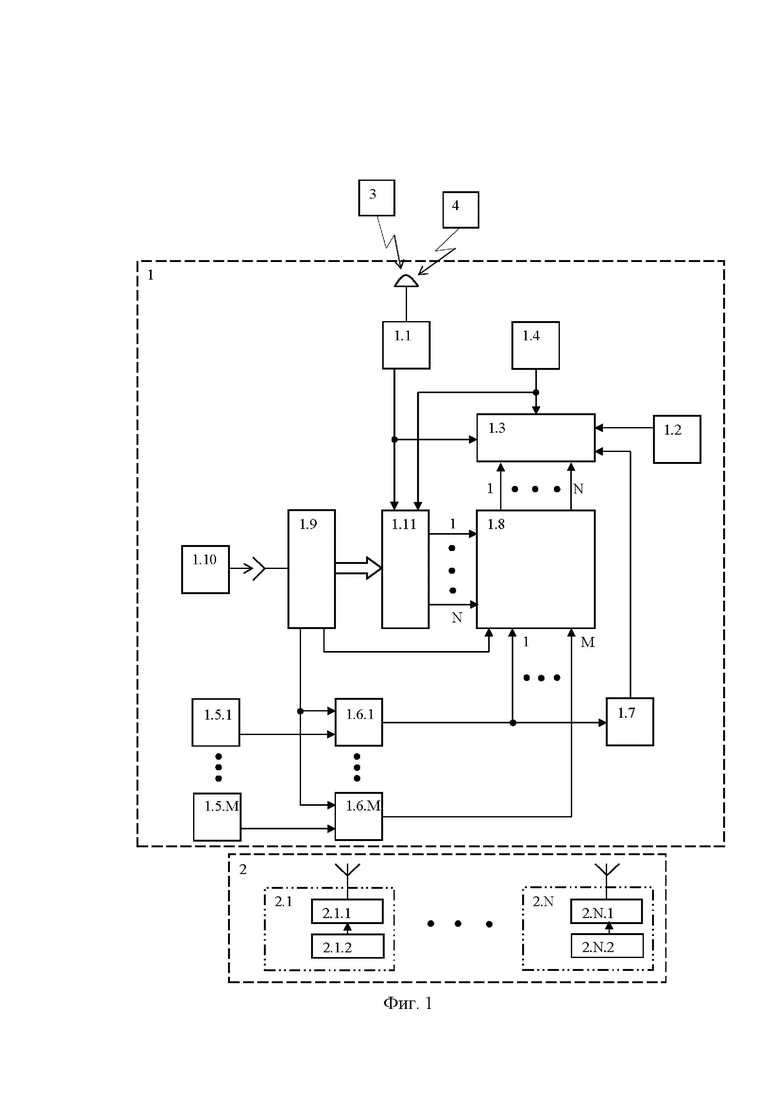
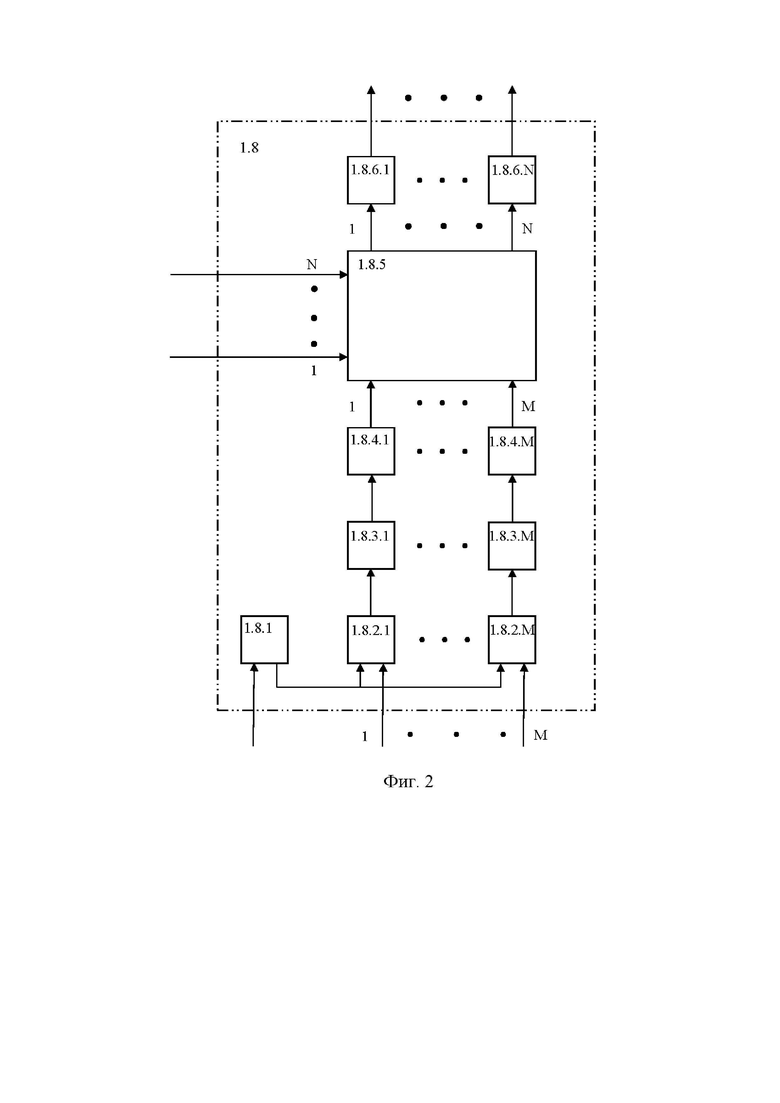
На фиг. 1 приведена структурная схема устройства измерения параметров радиосигналов пространственно-распределенной системы радиопередатчиков с использованием беспилотного летательного аппарата, на фиг. 2 приведена структурная схема блока пространственного разделения сигналов.
Устройство измерения параметров радиосигналов пространственно-распределенной системы радиопередатчиков с использованием беспилотного летательного аппарата состоит из размещенных на БПЛА 1 бортового приемника ГНСС 1.1, бортового гироскопического датчика 1.2, бортового накопителя информации 1.3, бортового датчика-компаса 1.4, М бортовых антенн 1.5.m, m=1, 2, … M, М перестраиваемых полосовых фильтров 1.6.m, m=1, 2, … M, широкополосного измерителя мощности 1.7, блока пространственного разделения сигналов 1.8, блока управления 1.9, съемного защищенного машинного носителя информации 1.10, и блока расчета направлений 1.11, которые имеют следующие связи между собой.
Выход бортового приемника ГНСС 1.1 соединен с одним из входов бортового накопителя информации 1.3 и с одним из входов блока расчета направлений 1.11. Выход бортового гироскопического датчика 1.2 соединен с другим входом бортового накопителя информации 1.3, выход датчика-компаса 1.4 соединен с третьим входом бортового накопителя информации 1.3 и с другим входом блока расчета направлений 1.11.
Съемный защищенный машинный носитель информации 1.10 через разъем Х1 соединен с входом блока управления 1.9, один выход блока управления 1.9 соединен с одним из входов блока пространственного разделения сигналов 1.8, многоканальный выход блока управления 1.9 соединен с многоканальным входом блока расчета направлений 1.11, а третий выход блока управления 1.9 соединен с дополнительными входами M перестраиваемых полосовых фильтров 1.6.m.
Выходы M бортовых антенн 1.5.m соединены с другими входами соответствующих М перестраиваемых полосовых фильтров 1.6.m. Выходы M перестраиваемых полосовых фильтров 1.6.m соединены с М входами блока пространственного разделения сигналов 1.8. При этом выход одного из М перестраиваемых полосовых фильтров 1.6.m дополнительно соединен с входом широкополосного измерителя мощности 1.7.
N выходов блока расчета направлений 1.11, n=1, 2, …, N, соединены с соответствующими N входами блока пространственного разделения сигналов 1.8, а N выходов блока пространственного разделения сигналов 1.8 соединены с соответствующими N входами бортового накопителя информации 1.3.
При этом блок пространственного разделения сигналов 1.8 состоит из гетеродина 1.8.1, М преобразователей частоты 1.8.2.m, m=1, 2, … M, М аналого-цифровых преобразователей 1.8.3.m, m=1, 2, … M, М квадратурных преобразователей частоты 1.8.4.m, m=1, 2, … M, блока разделения сигналов 1.8.5 и N устройств оценки амплитуды сигналов 1.8.6.n, n=1, 2, … N, имеющих следующие связи между собой. Вход гетеродина 1.8.1 является одним из входов блока пространственного разделения сигналов 1.8 и соединен с одним из выходов блока управления 1.9. Выход гетеродина 1.8.1 соединен с одним из входов каждого из М преобразователей частоты 1.8.2.m. Другие входы М преобразователей частоты 1.8.2.m являются М входами блока пространственного разделения сигналов 1.8 и соединены с соответствующими выходами М перестраиваемых полосовых фильтров 1.6.m. Выходы М преобразователей частоты 1.8.2.m соединены с соответствующими входами М аналого-цифровых преобразователей 1.8.3.m, М выходов которых соединены с соответствующими входами М квадратурных преобразователей частоты 1.8.4.m. Выходы М квадратурных преобразователей частоты 1.8.4.m соединены с соответствующими М входами блока разделения сигналов 1.8.5. Другие N входов блока разделения сигналов 1.8.5 являются N входами блока пространственного разделения сигналов 1.8 и соединены с соответствующими N выходами блока расчета направлений 1.11, а N выходов блока разделения сигналов 1.8.5 соединены с соответствующими входами N устройств оценки амплитуды сигналов 1.8.6.n. Выходы N устройств оценки амплитуды сигналов 1.8.6.n являются N выходами блока пространственного разделения сигналов 1.8 и соединены с соответствующими N входами бортового накопителя информации 1.3.
Устройство измерения параметров радиосигналов пространственно-распределенной системы радиопередатчиков с использованием беспилотного летательного аппарата работает следующим образом.
Пространственно-распределенная система радиопередатчиков 2, состоящая из совокупности N радиопередатчиков 2.n, n = 1, 2, …, N, при этом N<М, целесообразным образом дислоцированных на земной поверхности и одновременно излучающих на единой рабочей частоте f0 некогерентные специальные сигналы с одинаковой шириной спектра Δf. Каждый РПД 2.n включает в себя антенну 2.n.1 и генератор 2.n.2, в который вводится внешняя информация о заданной несущей частоте f0, ширине спектра Δf формируемого сигнала. При этом выход генератора 2.n.2 соединен с входом антенны 2.n.1, с выхода которой осуществляется излучение специального сигнала РПД 2.n на рабочей частоте f0 с заданной шириной спектра Δf.
Измерение параметров радиосигналов пространственно-распределенной системы радиопередатчиков осуществляется следующим образом.
Перед запуском БПЛА к блоку управления 1.9 через разъем Х1 подключают защищенный машинный носителя информации 1.10, в котором находится информация о заданной несущей частоте f0 и ширине спектра Δf принимаемых сигналов, заданной частоте гетеродина f0-fпч и координатах каждого РПД 2.n из состава ПРС РПД 2, которая поступает в блок управления 1.9. Блок управления 1.9 направляет информацию о заданной несущей частоте f0 и ширине спектра Δf принимаемых сигналов в перестраиваемые полосовые фильтры 1.6.m, которые производят настройку полосовых фильтров 1.6.m в соответствии с принятыми параметрами. Блок управления 1.9 направляет информацию о заданной частоте гетеродина
f0-fпч в гетеродин 1.8.1 блока пространственного разделения сигналов 1.8, а информацию о координатах каждого РПД 2.n из состава ПРС РПД 2 направляет в блок расчета направлений 1.11. После этого БПЛА 1 перемещается в заданную точку рабочего пространства ПРС РПД 2 в соответствии с заложенной в БПЛА 1 программой полета.
В заданной точке нахождения БПЛА 1 на вход М бортовых антенн 1.5.m, упорядоченно расположенных относительно строительной оси БПЛА 1, поступает электромагнитное поле (ЭМП) совокупности сигналов всех РПД 2.n, входящих в состав ПРС РПД 2, на единой рабочей частоте f0, с заданной шириной спектра Δf. В бортовых антеннах 1.5.m осуществляется преобразование входного ЭМП в соответствующие электрические сигналы и передача их в соответствующие М перестраиваемых полосовых фильтров 1.6.m, настроенных на заданную частоту f0 и заданную полосу частот Δf. На выходах М перестраиваемых полосовых фильтров 1.6.m формируются электрические сигналы, представляющие собой совокупный сигнал всех РПД 2.n. Совокупные сигналы с выходов М перестраиваемых полосовых фильтров 1.6.m поступают на М входов блока пространственного разделения сигналов 1.8, непосредственно на входы М преобразователей частоты 1.8.2.m.
Кроме того, совокупный сигнал с выхода одного перестраиваемого полосового фильтра 1.6.m дополнительно поступает в широкополосный измеритель мощности 1.7. В широкополосном измерителе мощности 1.7 осуществляется измерение суммарной мощности совокупности сигналов всех РПД 2.n, входящих в состав ПРС РПД 2, излученных на единой рабочей частоте f0, с заданной шириной спектра Δf. Результаты измерения суммарной мощности с выхода широкополосного измерителя мощности 1.7 поступают в накопитель информации 1.3, где осуществляется их регистрация с привязкой к моменту времени измерения и координатам заданной точки рабочего пространства ПРС РПД 2, значения которых поступают в накопитель информации 1.3 с приемника ГНСС 1.1, а также к параметрам угловой ориентации БПЛА 1 в пространстве, значения которых поступают в накопитель информации 1.3 от датчика-компаса 1.4 (угол курса) и от гироскопического датчика 1.2 (углы крена, тангажа и рыскания). Высокоточное определение координат БПЛА 1 и момента времени измерения осуществляется в приемнике ГНСС 1.1 на основании навигационных сигналов, поступающих от навигационных космических аппаратов (НКА) 3 ГНСС и сигналов дифференциальных поправок, поступающих от контрольно-корректирующей станции (ККС) 4.
В блоке расчета направлений 1.11 на основании информации о координатах всех РПД 2.n, входящих в состав ПРС РПД 2, поступающей от блока управления 1.9, информации о текущих точных координатах БПЛА 1, поступающей от приемника ГНСС 1.1, и информации о значении курса БПЛА 1 (угол между направлением на север и направлением строительной оси БПЛА 1), поступающей от датчика-компаса 1.4, рассчитываются значения направления αn на каждый РПД 2.n, отсчитываемого из текущей точки расположения БПЛА 1 относительно строительной оси БПЛА 1. Рассчитанные значения направлений αn, n = 1, 2, …, N, с N выходов блока расчета направлений 1.11 поступают на N входов блока пространственного разделения сигналов 1.8, непосредственно на блок разделения сигналов 1.8.5.
В блоке пространственного разделения сигналов 1.8 гетеродин 1.8.1, настроенный на заданную частоту f0-fпч по информации из блока управления 1.9, формирует опорный сигнал на заданной частоте f0-fпч и передает его на входы М преобразователей частоты 1.8.2.m. На другие входы М преобразователей частоты 1.8.2.m поступают совокупные сигналы с выходов М перестраиваемых полосовых фильтров 1.6.m. В М преобразователях частоты 1.8.2.m осуществляется преобразование совокупных сигналов на промежуточную частоту fпч и дальнейшая передача их в М соответствующих аналого-цифровых преобразователей 1.8.3.m.
В аналого-цифровых преобразователях 1.8.3.m осуществляется дискретизация и квантование сигналов с формированием цифровых отсчетов М совокупных сигналов на промежуточной частоте. Полученные в М аналого-цифровых преобразователях 1.8.3.m цифровые отсчеты М совокупных сигналов передаются в соответствующие М квадратурных преобразователей частоты 1.8.4.m, где осуществляется перенос спектра совокупных сигналов на «нулевую» частоту с формированием комплексных цифровых отсчетов М совокупных сигналов, которые далее поступают на М входов блока разделения сигналов 1.8.5.
В блоке разделения сигналов 1.8.5 в результате обработки М совокупных сигналов, поступающих с выходов М квадратурных преобразователей частоты 1.8.4.m, в соответствии с алгоритмом пространственного разделения сигналов [2] с использованием информации о значении направления αn на каждый РПД 2.n, поступающей из блока расчета направлений 1.11, осуществляется выделение сигналов соответствующих РПД 2.n, n = 1, 2, …, N, из совокупных сигналов.
Выделенные сигналы РПД 2.n с N выходов блока разделения сигналов 1.8.5 поступают на соответствующие входы N устройств оценки амплитуды сигналов 1.8.6.n, n = 1, 2, …, N, на N выходах которых формируются значения амплитуды сигналов каждого РПД 2.n, n = 1, 2, …, N, поступающие на N входов накопителя информации 1.3 для их регистрации с привязкой к моменту времени измерения и координатам заданной точки рабочего пространства ПРС РПД 2, поступающим на вход накопителя информации 1.3 с выхода приемника ГНСС 1.1, а также к параметрам угловой ориентации БПЛА 1 в пространстве, поступающим на входы накопителя информации 1.3 с выхода датчика-компаса 1.4 (угол курса) и гироскопического датчика 1.2 (углы крена, тангажа и рыскания).
Таким образом, предложенное устройство измерения параметров радиосигналов пространственно-распределенной системы радиопередатчиков с использованием беспилотного летательного аппарата обеспечивает возможность измерения в заданной точке рабочего пространства пространственно-распределенной системы радиопередатчиков не только суммарной мощности совокупности всех некогерентных сигналов радиопередатчиков, но и амплитуды каждого из некогерентных парциальных сигналов радиопередатчиков, входящих в состав пространственно-распределенной системы, и их регистрации с привязкой к моменту времени измерения, координатам заданной точки рабочего пространства и параметрам угловой ориентации БПЛА 1 в пространстве.
Источники информации
1. Патент № 2626561 Российская Федерация, МПК G01R 29/10 (2006.01). Способ измерения параметров направленности антенны с помощью БПЛА методом облета : № 2016114365: заявл. 13.04.2016: опубл. 28.07.2017 / Классен В.И., Левитан Б.А., Просвиркин И.А., Топчиев С.А. – 9 с.: ил. – Текст: непосредственный.
2. Патент № 2722413. Российская Федерация, МПК G01S 3/74 (2006.01). Устройство и способ пространственного разделения сигналов № 2019132703 : заявл. 16.10.2019 : опубл. 29.05.2020 / Маркин В.Г., Шуваев В.А., Красов Е.М. ; заявитель АО НВП "ПРОТЕК". – 14 с. : ил. – Текст : непосредственный.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения параметров радиосигналов пространственно-распределенной системы радиопередатчиков с использованием беспилотного летательного аппарата | 2024 |
|
RU2818013C1 |
| Программно-определяемая радиосистема с функцией обеспечения совместимости с устройствами узкополосной радиосвязи, работающими в лицензируемых диапазонах частот | 2022 |
|
RU2798476C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| Пространственно-распределенная система радиопомех на беспилотных летательных аппаратах | 2023 |
|
RU2807312C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2023 |
|
RU2809930C1 |
| УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2525299C1 |
| СПОСОБ И УСТРОЙСТВО СОЗДАНИЯ ПРЕДНАМЕРЕННЫХ ПОМЕХ | 2013 |
|
RU2543078C1 |
| Малогабаритная радиостанция передачи команд управления беспилотным летательным аппаратом | 2021 |
|
RU2767605C1 |
| Способ обнаружения и оценивания характеристик широкополосных сигналов и устройство для его реализации | 2023 |
|
RU2814220C1 |
| Приемник аппаратуры потребителей сигналов глобальных навигационных спутниковых систем, обеспечивающий обнаружение и блокирование ложных навигационных сигналов | 2024 |
|
RU2829323C1 |
Изобретение относится к устройствам для измерения с использованием беспилотных летательных аппаратов (БПЛА) характеристик электромагнитного поля, создаваемого совокупностью источников электромагнитного излучения, в частности может быть использовано для измерения параметров радиосигналов пространственно-распределенных систем (ПРС) радиопередатчиков (РПД), одновременно излучающих на единой рабочей частоте некогерентные специальные сигналы с одинаковой шириной спектра. Сущность заявленного решения заключается в том, что в устройство дополнительно введены блок пространственного разделения сигналов, блок расчета направлений, блок управления и съемный защищенный машинный носитель информации, использованы М бортовых антенн, М перестраиваемых полосовых фильтров, в которые введен дополнительный вход, в бортовой накопитель информации дополнительно введены N входов, М>N, имеющих связи между собой. Техническим результатом при реализации заявленного решения является обеспечение возможности измерения в заданной точке рабочего пространства не только суммарной мощности совокупности всех некогерентных сигналов ПРС РПД, но и амплитуды каждого из некогерентных парциальных сигналов РПД, входящих в состав ПРС РПД. 2 ил.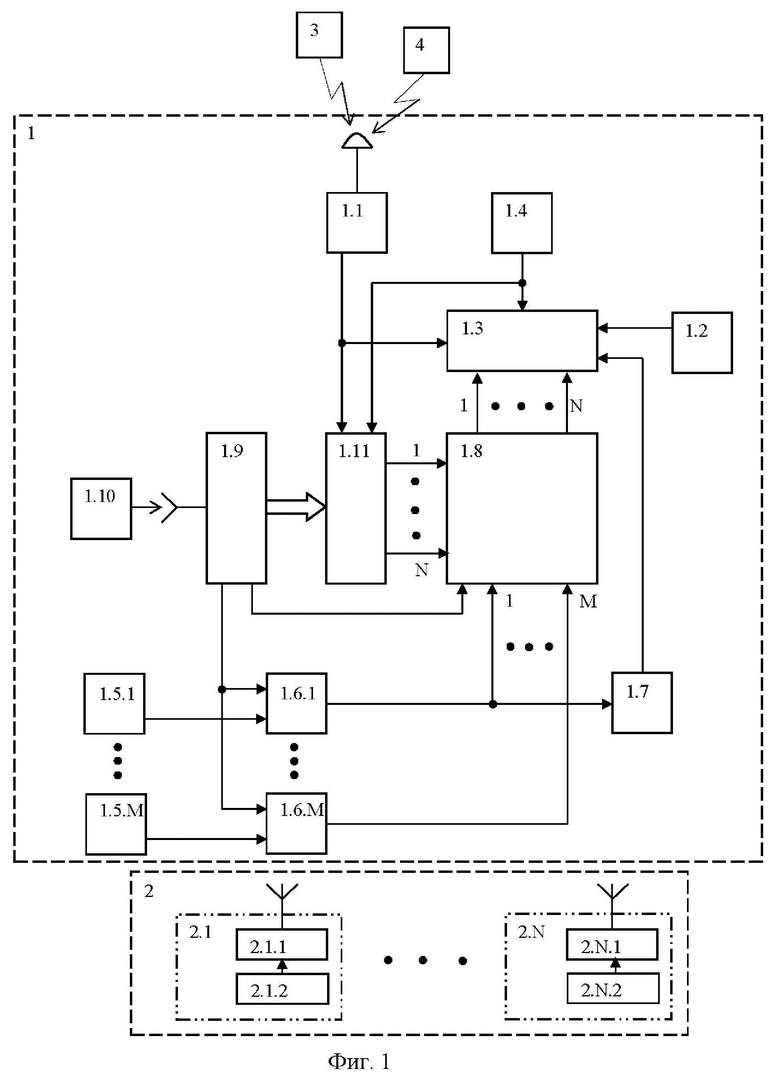
Устройство измерения параметров радиосигналов пространственно-распределенной системы (ПРС) радиопередатчиков (РПД) с использованием беспилотного летательного аппарата (БПЛА), состоящее из бортовой антенны, перестраиваемого полосового фильтра, широкополосного измерителя мощности, бортового приемника сигналов ГНСС, бортового накопителя информации, гироскопического датчика, датчика-компаса, отличающееся тем, что дополнительно введены блок пространственного разделения сигналов, блок расчета направлений, блок управления и съемный защищенный машинный носитель информации, использованы М бортовых антенн, М перестраиваемых полосовых фильтров, в которые введен дополнительный вход, в бортовой накопитель информации дополнительно введены N входов, М>N, имеющих следующие связи между собой: съемный защищенный машинный носитель информации через разъем Х1 соединен с входом блока управления, один выход блока управления соединен с одним из входов блока пространственного разделения сигналов, многоканальный выход блока управления соединен с многоканальным входом блока расчета направлений, а третий выход блока управления соединен с дополнительными входами M перестраиваемых полосовых фильтров, входы которых соединены с выходами соответствующих М бортовых антенн, а выходы M перестраиваемых полосовых фильтров соединены с М входами блока пространственного разделения сигналов, выход одного из М перестраиваемых полосовых фильтров дополнительно соединен с входом широкополосного измерителя мощности, один из входов блока расчета направлений соединен с выходом приемника ГНСС, другой его вход соединен с выходом датчика-компаса, а его N выходов соединены с N входами блока пространственного разделения сигналов, N выходов блока пространственного разделения сигналов соединены с N входами бортового накопителя информации, n=1, 2, …, N, при этом блок пространственного разделения сигналов состоит из гетеродина, М преобразователей частоты, М аналого-цифровых преобразователей, М квадратурных преобразователей частоты, блока разделения сигналов и N устройств оценки амплитуды сигналов, имеющих следующие связи между собой: вход гетеродина является одним из входов блока пространственного разделения сигналов и соединен с одним из выходов блока управления, выход гетеродина соединен с одним из входов каждого из М преобразователей частоты, у которых другие входы являются М входами блока пространственного разделения сигналов и соединены с соответствующими выходами М перестраиваемых полосовых фильтров, выходы М преобразователей частоты соединены с соответствующими входами М аналого-цифровых преобразователей, М выходов которых соединены с соответствующими входами М квадратурных преобразователей частоты, выходы М квадратурных преобразователей частоты соединены с соответствующими М входами блока разделения сигналов, другие N входов которого являются N входами блока пространственного разделения сигналов и соединены с соответствующими N выходами блока расчета направлений, а N выходов блока разделения сигналов соединены с соответствующими входами N устройств оценки амплитуды сигналов, выходы которых являются N выходами блока пространственного разделения сигналов и соединены с соответствующими N входами бортового накопителя информации.
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕННЫ С ПОМОЩЬЮ БПЛА МЕТОДОМ ОБЛЕТА | 2016 |
|
RU2626561C1 |
| Статья "ИСПОЛЬЗОВАНИЕ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В КАЧЕСТВЕ РЕТРАНСЛЯТОРОВ РАДИОСИГНАЛА ПРИ ПРОВЕДЕНИИ РАДИОТЕЛЕМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ", Ж | |||
| Военная мысль, 2020 | |||
| Устройство пространственного разделения сигналов | 2019 |
|
RU2722413C1 |
| US 7312750 B2, 25.12.2007 | |||
| CN 101027571 B, 04.05.2011. | |||

