1. Область техники, к которой относится изобретение
Изобретение относится к технике антенных измерений и может быть использовано для исследования диаграмм направленности (ДН) антенны методом облета.
2. Уровень техники
Известен способ измерения ДН диапазонной антенны (СССР, SU 1804627 A3, G01R 29/10, опубл., 23.03.1993), включающий излучение сигнала на каждой частоте рабочего диапазона с борта летательного аппарата, перемещающегося в дальней зоне исследуемой антенны по заданной траектории.
Также известен облетный способ измерения ДН, основанный на перемещении измерительной аппаратуры в пространстве относительно исследуемой антенны с помощью пилотируемых и непилотируемых летательных аппаратов, описанный в книге «Метод измерения характеристик антенн СВЧ» под ред. Н.М. Цейтлина. 1985, стр. 128-135.
Общими недостатками данных способов являются низкие точность и производительность измерений диаграммы направленности.
Известен способ, основанный на использовании бортового источника излучений, перемещаемого в пространстве относительно исследуемой антенны с помощью летательного аппарата, наземной опорной антенны, работающей на частоте исследуемой антенны, средств измерения координат летательного аппарата и включающий в себя излучение измерительных сигналов бортовым источником, прием излученных сигналов исследуемой антенной и опорной антенной, измерение отношения амплитуд принятых измерительного и опорного сигналов, измерение текущих угловых координат летательного аппарата, ориентирование оси опорной антенны на летательный аппарат в процессе измерений, описанный в книге «Автоматизированные антенные измерения». Страхов А.Ф., 1985, стр. 73-75.
Недостатком данного способа является невозможность обеспечения требуемой точности измерения ДН исследуемой приемной антенны.
Известен способ измерения ДН приемной антенны (СССР, SU 1778714 A1, G01R 29/10, опубл. 30.11.1992), в котором излучаются измерительные сигналы f0 с борта летательного аппарата, перемещающегося в дальней зоне исследуемой антенны, прием излученного измерительного сигнала исследуемой антенной и опорного сигнала опорной антенной, измерение отношения амплитуд принятого измерительного и опорного сигналов с одновременным измерением координат летательного аппарата относительно исследуемой антенны, при этом ось опорной антенны постоянно ориентируют в направлении на летательный аппарат. Этот вариант принимается за прототип.
Недостатком выбранного в качестве прототипа способа является невозможность измерения ДН передающих антенн и высокая удельная стоимость измерений за счет более сложной конструкции и низкого уровня автоматизации.
3. Раскрытие изобретения
Основной задачей, на решение которой направлено заявляемое изобретение, является разработка нового способа, обеспечивающего получение следующего технического результата: повышение точности, сокращение времени измерения параметров направленности антенны и уменьшение стоимости их исследования.
Поставленная задача решается, а требуемый технический результат при использовании изобретения достигается тем, что, с целью полной автоматизации измерения параметров направленности антенны, в качестве носителя измерительного зонда используют беспилотный летательный аппарат (коптерного, самолетного или иного типа), совершающий круговые облеты измеряемой антенны, вдоль маршрута, представляющего собой сечения сферы радиусом R, превышающим расстояние, удовлетворяющее условию дальней зоны исследуемой антенны, в полностью автоматическом режиме.
Определение глобальных координат БПЛА выполняется посредством бортового приемника сигналов глобальной навигационной спутниковой системы (ГНСС, в том числе ГЛОНАСС). Требуемая точность достигается за счет внесения полученных с контрольно-корректирующей станции (ККС) дифференциальных поправок в результат измерений в процессе постобработки.
Для повышения точности измерений амплитуды сигнала в процессе постобработки и построения ДН в результат измерений вносятся поправки на основе данных о положении БПЛА относительно исследуемой антенны в момент измерений и априори известной ДН бортовой антенны.
4. Краткое описание чертежей
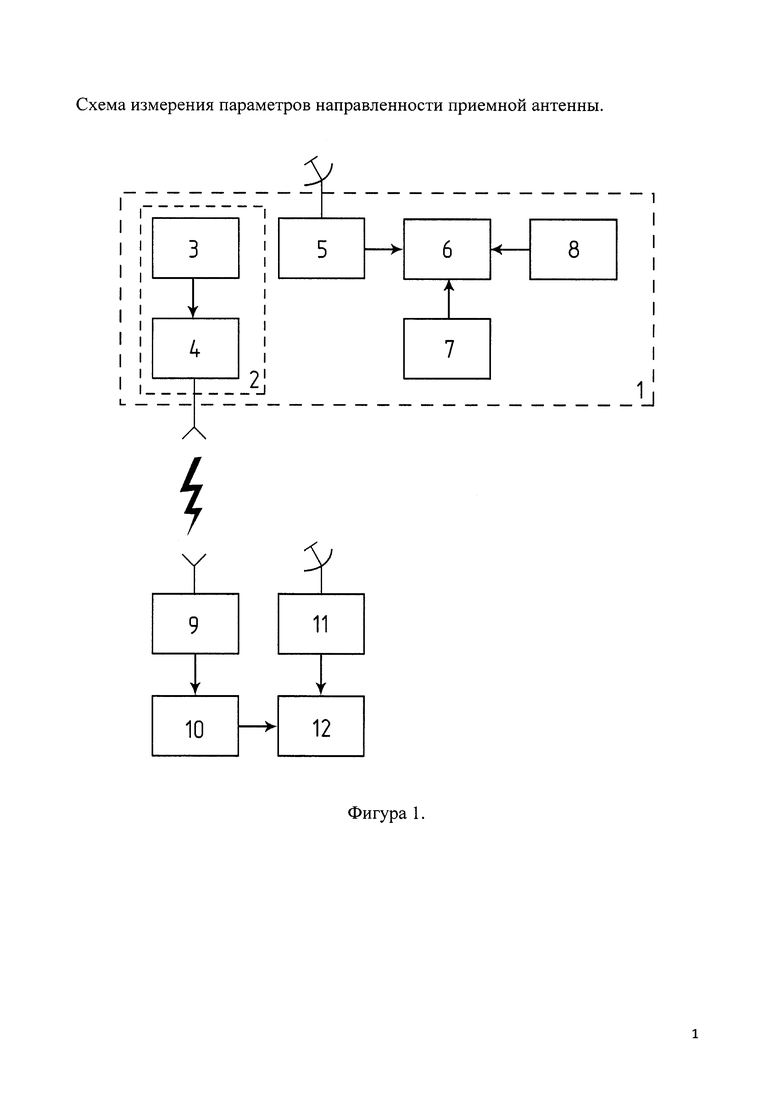
На фигуре 1 представлена схема измерения ДН приемной антенны, находящейся в режиме приема сигнала, состоящая из: беспилотного летательного аппарата - 1, радиотехнического блока - 2, включающего в себя бортовой генератор - 3 и бортовую антенну - 4, бортового приемника сигналов ГНСС - 5, бортового накопителя информации - 6, гироскопического датчика - 7, датчика-компаса - 8, исследуемой стационарной приемной антенны - 9, приемного измерительного устройства - 10, ККС - 11, наземной станции ЭВМ - 12.
При этом на борту БПЛА - 1 бортовой генератор - 3 соединен с бортовой антенной - 4, первый вход бортового накопителя информации - 6 подключен к выходу ГНСС - 5, второй вход к выходу гироскопического датчика - 7, а третий вход подключен к выходу датчика-компаса - 8. На Земле к станции ЭВМ - 12 подключена ККС - 11, а также исследуемая стационарная приемная антенна - 9 и приемное измерительное устройство - 10, которые соединены между собой последовательно.
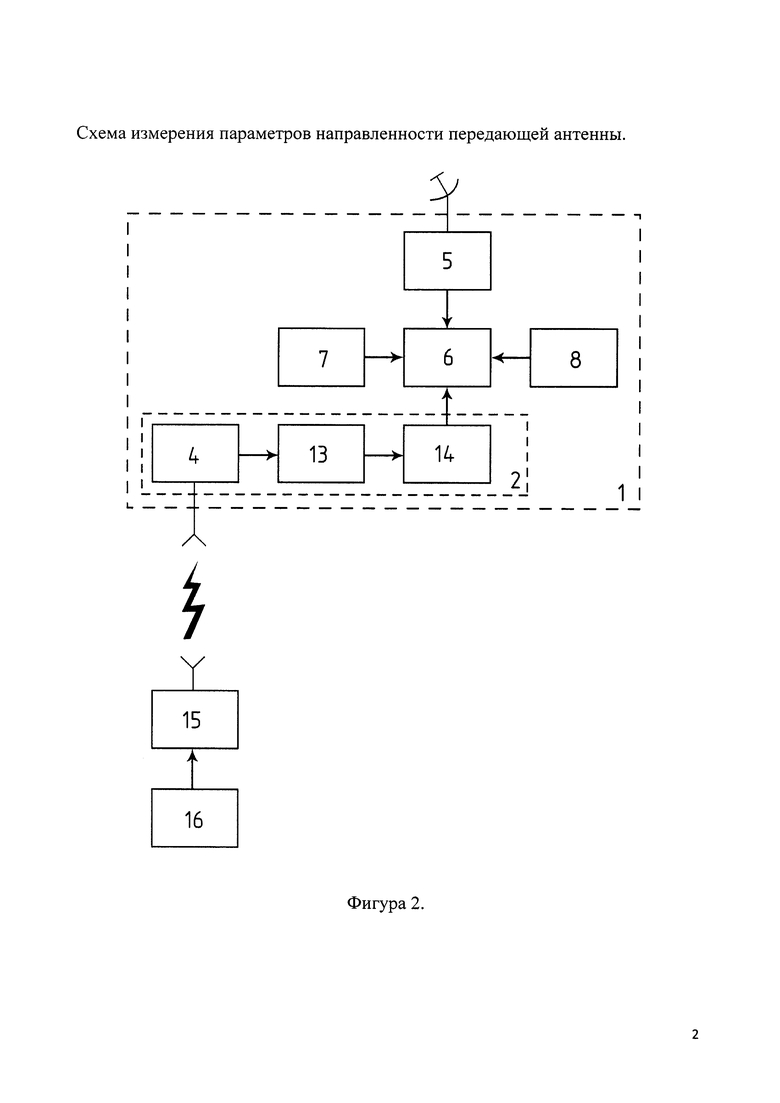
На фигуре 2 представлена схема измерения антенны, находящейся в режиме передачи сигнала и состоящей из: перестраиваемого полосового фильтра - 13, широкополосного измерителя мощности - 14, исследуемой стационарной передающей антенны - 15, наземного генератора - 16.
При этом на борту БПЛА - 1 бортовая антенна - 4, перестраиваемый полосовой фильтр - 13, широкополосный измеритель мощности - 14 соединены последовательно и подключены к первому входу бортового накопителя - 6. Ко второму входу бортового накопителя информации - 6 подключен бортовой приемник сигналов ГНСС - 5, к третьему входу гироскопический датчик - 7, а к четвертому входу датчик - компас - 8. На Земле исследуемая стационарная передающая антенна - 15 соединена с наземным генератором - 16.
5. Осуществление изобретения
Принцип измерения приемной антенны, фиг. 1, состоит в следующем.
Бортовой генератор - 3, бортовая антенна - 4, бортовой приемник сигналов ГНСС - 5, бортовой накопитель информации - 6, гироскопический датчик - 7 и датчик-компас - 8 с помощью беспилотного летательного аппарата - 1 вводятся в зону измерений, на расстоянии, удовлетворяющем условию дальней зоны исследуемой антенны. С периодичностью At на бортовой накопитель информации - 6 поступают данные о текущем времени и координатах с бортового приемника сигналов ГНСС - 5, а также данные об ориентации БПЛА относительно севера с датчика - компаса - 8, углах крена ϕ, тангажа θ и рысканья ψ БПЛА с гироскопического датчика - 6. Генератор - 3 через бортовую антенну - 4 излучает монохроматические сигналы частоты f, которые принимаются исследуемой антенной - 9 и поступают на приемное измерительное устройство - 10, в котором по запросу ЭВМ - 12 с периодичностью Δt происходит измерение амплитуды сигнала, далее информация поступает на вход ЭВМ - 12, куда также поступают данные о текущем времени с ККС - 11.
Принцип измерения передающей антенны, фиг. 2, состоит в следующем.
Бортовая антенна - 4, бортовой приемник сигналов ГНСС - 5, бортовой накопитель информации - 6, гироскопический датчик - 7, датчик-компас - 8, перестраиваемый полосовой фильтр - 13 и широкополосный измеритель мощности - 14 с помощью БПЛА - 1 вводятся в зону измерений, на расстоянии, удовлетворяющем условию дальней зоны. Наземный генератор - 16 через исследуемую стационарную антенну - 15 излучает сигналы частоты f, которые принимаются антенной - 4 на борту БПЛА - 1, далее сигнал поступает в перестраиваемый полосовой фильтр - 13, предварительно настроенный на пропуск частоты f. Широкополосный измеритель мощности - 14 производит измерение амплитуды сигнала. С периодичностью Δt на вход бортового накопителя информации - 6 поступают данные измерений с выхода широкополосного измерителя мощности - 14, координаты БПЛА в момент измерения с бортового приемника ГНСС - 5, данные об углах крена ϕ, тангажа θ и рысканья ψ БПЛА с гироскопического датчика - 6, а также данные об ориентации БПЛА относительно севера с датчика-компаса - 8.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК НАПРАВЛЕННОСТИ ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКИ В ЗОНЕ ФРЕНЕЛЯ С ПОМОЩЬЮ БЕСПИЛОТНОЙ АВИАЦИОННОЙ СИСТЕМЫ | 2022 |
|
RU2797461C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ОРИЕНТАЦИИ БОРТОВОЙ АНТЕННЫ БЕСПИЛОТНОГО КОМПЛЕКСА ДЛЯ ИЗМЕРЕНИЙ ПАРАМЕТРОВ НАПРАВЛЕННОСТИ АНТЕНН | 2019 |
|
RU2704393C1 |
| Устройство измерения параметров радиосигналов пространственно-распределенной системы радиопередатчиков с использованием беспилотного летательного аппарата | 2024 |
|
RU2818013C1 |
| Устройство измерения параметров радиосигналов пространственно-распределенной системы радиопередатчиков с использованием беспилотного летательного аппарата | 2024 |
|
RU2818856C1 |
| СПОСОБ И СИСТЕМА АНТЕННЫХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ПРИВЯЗНОГО АЭРОСТАТА | 2023 |
|
RU2818996C1 |
| Способ контроля диаграммы направленности антенны облетным методом с помощью БПЛА | 2022 |
|
RU2836791C2 |
| СПОСОБ ИЗМЕРЕНИЯ ШИРИНЫ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2023 |
|
RU2807022C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ В ДАЛЬНЕЙ ЗОНЕ МЕТОДОМ ОБЛЕТА С ПОМОЩЬЮ БЛА | 2021 |
|
RU2758979C1 |
| КОМПЛЕКС ИЗМЕРЕНИЯ МОЩНОСТИ ИЗЛУЧЕНИЯ БАЗОВЫХ СТАНЦИЙ СОТОВОЙ СВЯЗИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2015 |
|
RU2606344C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МЕТОДОМ ОБЛЕТА | 2024 |
|
RU2822401C1 |
Изобретение относится к измерительной технике и может быть использовано для исследования диаграмм направленности (ДН) антенны методом её облета. Технический результат – расширение функциональных возможностей. Для этого обеспечивают автоматизацию процесса измерения направленности антенны на основе использования беспилотного летательного аппарат (БПЛА), совершающего круговые облеты измеряемой антенны в полностью автоматическом режиме, на расстоянии, удовлетворяющем условию дальней зоны исследуемой антенны. При этом определение глобальных координат БПЛА выполняется посредством бортового приемника сигналов глобальной навигационной спутниковой системы (ГНСС, в том числе ГЛОНАСС). Требуемая точность достигается за счет внесения полученных с контрольно-корректирующей станции (ККС) дифференциальных поправок в результат измерений в процессе постобработки. Для повышения точности измерений амплитуды сигнала в процессе постобработки и построения ДН в результат измерений вносятся поправки на основе данных о положении БПЛА относительно исследуемой антенны в момент измерений и априори известной ДН бортовой антенны. Заданная точность измерения ДН достигается за счет коррекции ошибок измерения глобальных координат, а также ошибок измерения амплитуды сигнала, связанных с эволюциями БПЛА в пространстве в процессе облета и неизотропностью ДН бортовой антенны. В случае измерения параметров направленности передающей антенны измерения мощности поля производятся непосредственно на борту БПЛА с помощью широкополосного измерителя мощности, фиксирующего мощность полезного сигнала, поступающего с входа перестраиваемого полосового фильтра. В случае измерения параметров направленности приемной антенны регистрация амплитуды сигнала производится на Земле посредством приемного измерительного устройства, подключенного к испытуемой антенне. Синхронизация данных измерений амплитуды сигнала и координат БПЛА производится в процессе постобработки по временным меткам, полученным с бортового приемника ГНСС на борту БПЛА и с ККС на Земле. В результате обеспечивается повышение точности, сокращение времени измерения технических характеристик антенн и уменьшение стоимости их исследования. 2 з.п. ф-лы, 2 ил.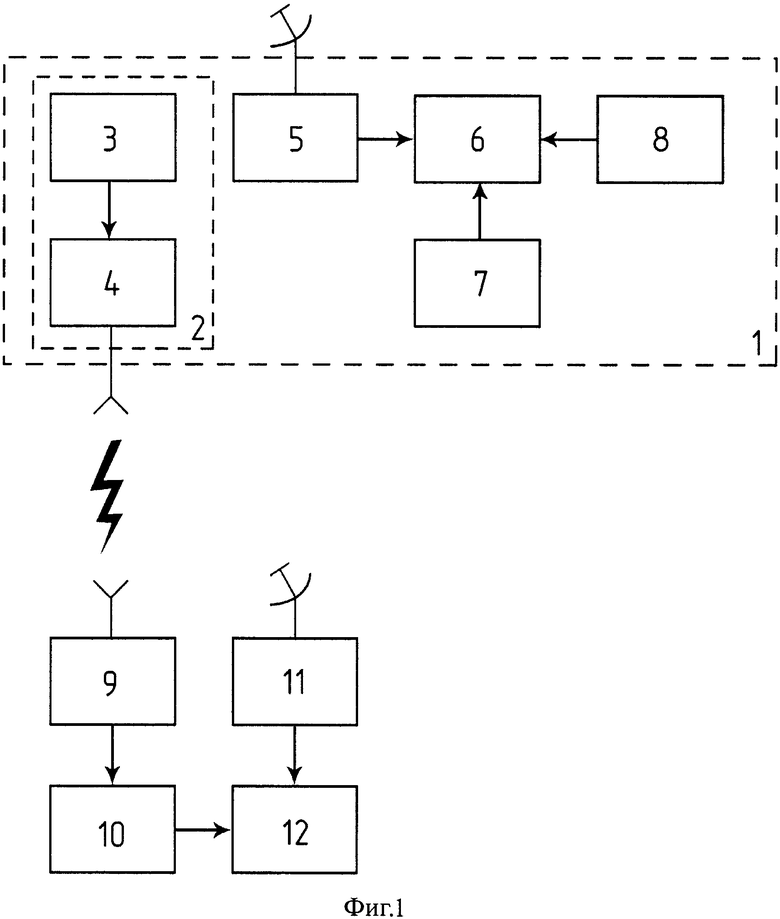
1. Способ автоматического измерения параметров направленности антенны методом облета в дальней зоне исследуемой антенны, основанный на применении беспилотного летательного аппарата (БПЛА), отличающийся тем, что, с целью повышения точности измерений, измерительная система содержит радиотехнический блок, приемник глобальной навигационной спутниковой системы (ГНСС), гироскопический датчик, датчик-компас, бортовой накопитель информации, ЭВМ, контрольно-корректирующую станцию (ККС) и в процессе облетов с периодичностью Δt дополнительно измеряют данные об ориентации БПЛА относительно севера, углы крена ϕ, тангажа θ и рысканья ψ на борту БПЛА, характеризующие положение бортовой антенны относительно исследуемой, а также дифференциальные поправки ККС для внесения корректировок в результаты измерений амплитуды сигнала и координат БПЛА в процессе постобработки и построения диаграммы направленности (ДН).
2. Способ автоматического измерения параметров направленности антенны по п. 1, отличающийся тем, что, с целью измерения ДН передающей антенны, радиотехнический блок содержит последовательно соединенные бортовую антенну, перестраиваемый полосовой фильтр и широкополосный измеритель мощности.
3. Способ автоматического измерения параметров направленности антенны по п. 1, отличающийся тем, что, с целью измерения ДН приемной антенны, радиотехнический блок содержит последовательно соединенные генератор и передающую антенну, а синхронизация данных измерений амплитуды сигнала и координат БПЛА производится в процессе постобработки по временным меткам, полученными с приемника ГНСС на борту БПЛА и с ККС на Земле.
| Способ измерения диаграммы направленности приемной антенны | 1990 |
|
SU1778714A1 |
| Способ измерения диаграммы направленности диапазонной антенны | 1990 |
|
SU1804627A3 |
| Способ измерения диаграммы направленности диапазонной антенны | 1990 |
|
SU1801216A3 |
| СПОСОБ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ | 2008 |
|
RU2366044C1 |
| Устройство для прогнозирования состояния систем управления | 1989 |
|
SU1679195A1 |
| US 2005206564 A1, 22.09.2005. | |||

