Изобретение принадлежит к области геопространственных данных и методам лазерной локации, в частности к определению получения пространственных моделей окружающей обстановки.
Известен робот-платформа, используемая для беспилотных исследований (патент на изобретение КНР №207817530, кл. G01T 17/88, 2018 г.), содержащая колесное мобильное устройство, включающее в себя ПЭВМ, соединенную с двумя монокулярными камерами, двухмерным и трехмерным лазерным радаром, 3D-камерой, имеющей гироскоп.
Недостатком указанного изобретения является необходимость проведения дополнительных расчетов в ПЭВМ и учета ошибки в каждой точке перемещения робота.
Также известна система получения реалистичной модели местности для виртуального мира и способ ее работы (патент на изобретение РФ №2723239, кл. G06T 15/00, 2011 г.), содержащая колесное мобильное устройство со стойкой штатива, камеры, лазерные сканеры, аппаратный блок, содержащий запоминающее устройство, GPS-приемник, блок объединения результатов фотосъемки и лазерных измерений, при этом аппаратный блок соединен с камерой и лазерным сканером.
Недостатком указанного изобретения является то, что оно является громоздким, малоподвижным. Данное устройство не везде может отснять пространство помещения, поскольку для него нужна расчищенная площадка. Также недостатками можно считать неустойчивость мобильного устройства, высоко расположенный центр тяжести и низкая прочность стойки штатива. Все указанные недостатки снижают точность моделирования пространство помещения в формате 3D.
Задача данного изобретения заключается в том, чтобы создать устройство обеспечивающее воспроизведение пространство помещения в формате 3D (3D-моделировки), с помощью мобильной платформы. Основными отраслями, где в наибольшей степени требуется получение 3D моделей помещения, считаются проектирование, архитектура и дизайн интерьера. Визуализация предоставляет возможность внести изменения или создать планировку пространства помещения. Моделирование способствует получению подробной информации о параметрах, формах, а также другие характеристики объекта в формате 3D. Преимуществом для представления 3D-моделей пространства считается пользование режима виртуальной реальности, которую кратко можно обозначать - VR. Под VR расценивается компьютерная методика, которая представляет реальную или воображаемую среду.
Техническим результатом изобретения является повышение точности моделирования пространство помещения в формате 3D за счет обеспечения устойчивости, мобильности и снижение массогабаритных показателей устройства.
Технический результат достигается тем, что в устройство для получения 3D моделей помещения содержащее колесную мобильную платформу, аппаратный блок соединенный с видеокамерами, фотокамерами и лазерным сканером и содержащий запоминающее устройство соединенный с блоком объединения результатов фотосъемки, видеосъемки и лазерных измерений, согласно изобретению колесная мобильная платформа имеет корпус и дополнительный лазерный сканер, при этом внутри корпуса размещены аппаратный блок, внутренний аккумулятор и устройство радиоуправления, причем видеокамеры установлены спереди и сзади корпуса, фотокамеры -спереди и по бокам корпуса, а лазерные сканеры выполнены в виде подставок с вращающимися измерительными элементами и установлены на верхней поверхности корпуса друг против друга по продольной оси корпуса и с возможностью регулирования наклона подставок относительной верхней поверхности корпуса в горизонтальной плоскости.
Основным превосходством заявляемого изобретения является:
• проведение работ с высокой скоростью и детальностью;
• использование последних процессов, позволяющие воспринимать в полном объеме точность местоположения объектов;
• точные панорамные представления пространства помещения. Новизна заявляемого изобретения обусловлена тем, что по сравнению с
известными техническими решениями и технологиями обеспечивается возможность повышения точности получения 3D моделей помещения.
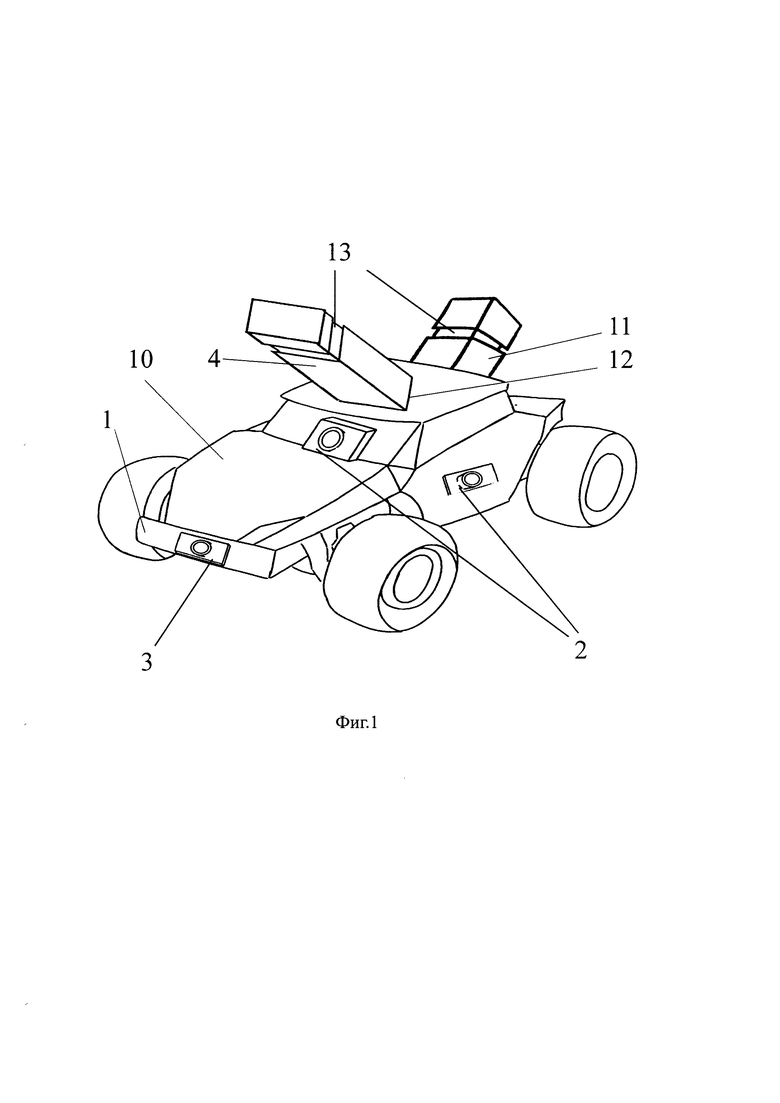
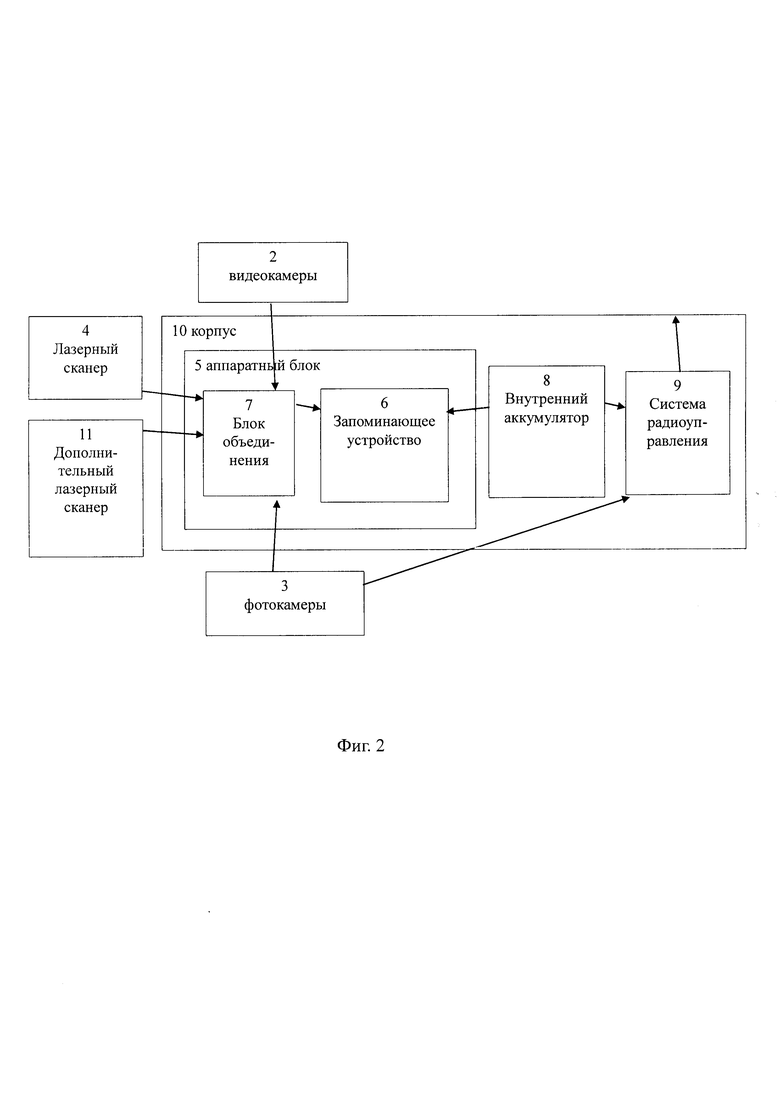
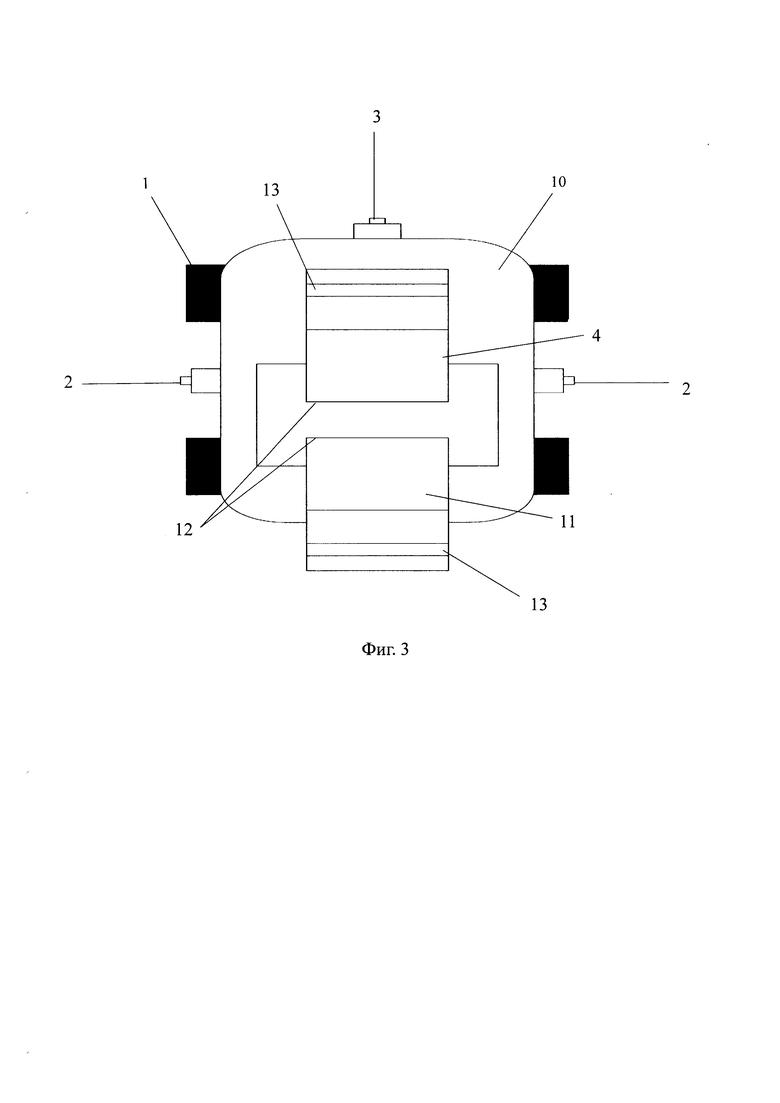
Сущность изобретения поясняется чертежом, где на Фиг. 1 - представлен общий вид устройства получения 3D моделей помещения; на Фиг. 2 - блок-схема устройства для получения 3D моделей помещения; на Фиг. 3 - вид устройства получения 3D моделей помещения сверху, в аксонометрии.
На графических материалах для большей ясности представлены только те элементы, которые необходимы для понимания сущности изобретения, а сопутствующие элементы, хорошо известные специалистам в данной области, не представлены.
Устройство для получения 3D моделей помещения (Фиг. 2), содержит колесную мобильную платформу 1, аппаратный блок 5 соединенный с видеокамерами 2, фотокамерами 3 и лазерным сканером 4. Аппаратный блок 5 содержит запоминающее устройство 6 соединенный с блоком объединения результатов фотосъемки, видеосъемки и лазерных измерений 7. Колесная мобильная платформа 1 также имеет внутренний аккумулятор 8, систему радиоуправления 9, корпус 10 и дополнительный лазерный сканер 11. Внутри корпуса 10 размещены аппаратный блок 5, внутренний аккумулятор 8 и система радиоуправления 9. Видеокамеры 2 установлены спереди и сзади корпуса 10, фотокамеры 3 - спереди и по бокам корпуса 10, а лазерные сканеры 4 и 11 выполнены в виде подставок 12 с вращающимися измерительными элементами 13 и установлены на верхней поверхности корпуса 10 друг против друга по продольной оси корпуса 10 и с возможностью регулирования наклона подставок 12 относительной верхней поверхности корпуса 10 в горизонтальной плоскости.
Устройство для получения 3D моделей помещения работает следующим образом. Колесное мобильное устройство 1 работает за счет внутреннего аккумулятора 8 и осуществляет движение при помощи системы радиоуправления 9. Выбор такой конструкции обусловлен его мобильностью и простотой в использовании, небольшой размер позволяет беспрепятственно маневрировать в любом пространстве помещения. На передней и задней панелях установлены видеокамеры 2 для управления, с помощью которых осуществляется контроль за передвижением устройства. За счет видеокамер 2 оператор может наблюдать за пространством помещения вокруг и корректировать маршрут. Со всех сторон колесного мобильного устройства 1 располагаются фотокамеры 3, способные принимать облако точек одновременно с реальными изображениями пространственного помещения. Угол получения отображения объектов помещения составляет 360 градусов. Механизм действия лазерных сканеров 4 и 11 следующий: лазерный луч, отражаясь от объектов вокруг, создает облако точек, имеющих свои координаты в пространстве. В блоке объединения результатов фотосъемки, видеосъемки и лазерных измерений 7, облако точек накладываются на фотографии, синхронизируются и записываются на запоминающее устройство 6, которое находится в аппаратном блоке 5, контролирующий и синхронизирующий работу лазерных сканеров 4 и 11, видеокамер 2 и фотокамер 3. Сохраненное облако точек предоставляется на монитор оператора сразу в процессе сканирования данного пространства помещения. Полученные точки можно пересматривать, поворачивать, осуществлять какие-либо с ними измерения. Далее с помощью любого 3D редактора, например, в продуктах Autodesk таких как Blender или 3DsMax сохраненное облако точек можно преобразовать в готовую трехмерную модель пространства помещения.
Заявленное устройство позволяют повысить точность получения виртуальной картинки помещения. Кроме этого, заявленное изобретение может найти широкое применение за счет невысокой стоимости при его использовании.
Применение изобретения позволит: получить облако точек по результатам лазерного сканирования, а также улучшенную модель мобильной конструкции устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОЛУЧЕНИЯ РЕАЛИСТИЧНОЙ МОДЕЛИ МЕСТНОСТИ ДЛЯ ВИРТУАЛЬНОГО МИРА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2723239C1 |
| СПОСОБ КОНТРОЛЯ ЗА СОСТОЯНИЕМ ФУТЕРОВКИ ТЕПЛОВЫХ АГРЕГАТОВ | 2022 |
|
RU2795734C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО СОЗДАНИЯ ТРЕХМЕРНЫХ СИСТЕМ ГОРОДСКИХ ПАНОРАМ НА ОСНОВЕ ДАННЫХ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2601165C2 |
| Способ бесконтактного измерения геометрических параметров и породно-качественного состава штабеля круглых лесоматериалов, погруженных на автотранспорт и/или прицеп, и автоматизированная система для осуществления способа | 2021 |
|
RU2778975C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЗИРОВАННОГО ПОСТРОЕНИЯ ВИРТУАЛЬНОЙ 3D-СЦЕНЫ НА ОСНОВАНИИ ДВУМЕРНЫХ СФЕРИЧЕСКИХ ФОТОПАНОРАМ | 2024 |
|
RU2826369C1 |
| СПОСОБ КОНТРОЛЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ДЫМОВОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2545062C1 |
| Система и способ для определения пространственного положения и выправки железнодорожного пути, устройство лазерного измерения системы сбора данных о фактическом положении пути | 2023 |
|
RU2808852C1 |
| Способ адаптации окружающего пространства для пользователей зрительных протезных систем | 2024 |
|
RU2841319C1 |
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |
| КОМПЛЕКС ДЛЯ ПОЛУЧЕНИЯ ФОТО- И ВИДЕОИЗОБРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2823046C1 |
Изобретение относится к области вычислительной техники, а именно к средствам для получения пространственных моделей помещений. Технический результат направлен на повышение точности построения карты помещений. Предлагается устройство для получения 3D-моделей помещения, содержащее колесную мобильную платформу, аппаратный блок, соединенный с фотокамерами и лазерным сканером и содержащий запоминающее устройство, соединенный с блоком объединения результатов фотосъемки, видеосъемки и лазерных измерений, при этом колесная мобильная платформа имеет корпус и дополнительный лазерный сканер, при этом внутри корпуса размещены аппаратный блок, соединенный с видеокамерами, внутренний аккумулятор и устройство радиоуправления, причем видеокамеры установлены спереди и сзади корпуса, фотокамеры - спереди и по бокам корпуса, а лазерные сканеры выполнены в виде подставок с вращающимися измерительными элементами и установлены на верхней поверхности корпуса напротив друг друга по продольной оси корпуса и с возможностью регулирования наклона подставок относительной верхней поверхности корпуса в горизонтальной плоскости. 3 ил.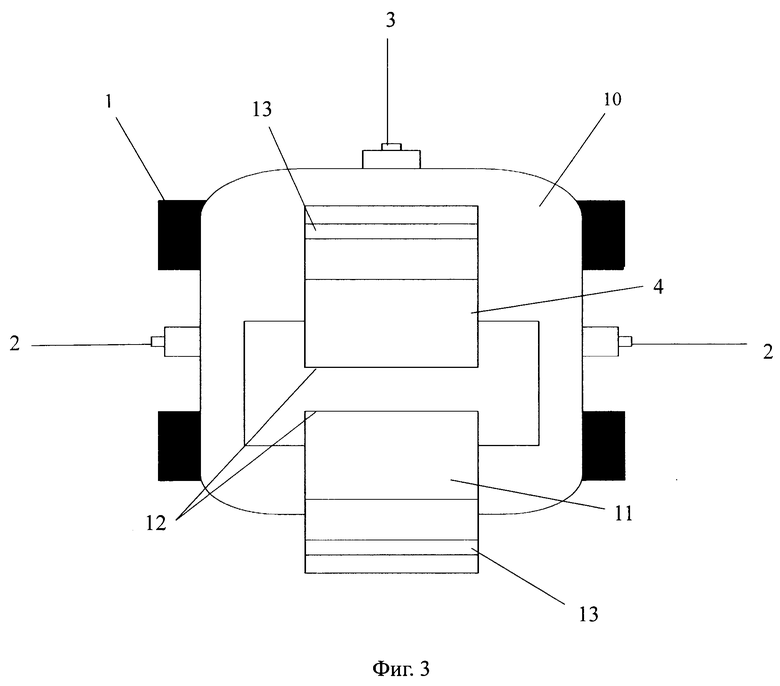
Устройство для получения 3D-моделей помещения, содержащее колесную мобильную платформу, аппаратный блок, соединенный с видеокамерами, фотокамерами и лазерным сканером и содержащий запоминающее устройство, соединенный с блоком объединения результатов фотосъемки, видеосъемки и лазерных измерений, отличающееся тем, что колесная мобильная платформа имеет корпус и дополнительный лазерный сканер, при этом внутри корпуса размещены аппаратный блок, внутренний аккумулятор и устройство радиоуправления, причем видеокамеры установлены спереди и сзади корпуса, фотокамеры - спереди и по бокам корпуса, а лазерные сканеры выполнены в виде подставок с вращающимися измерительными элементами и установлены на верхней поверхности корпуса напротив друг друга по продольной оси корпуса и с возможностью регулирования наклона подставок относительной верхней поверхности корпуса в горизонтальной плоскости.
| СИСТЕМА ПОЛУЧЕНИЯ РЕАЛИСТИЧНОЙ МОДЕЛИ МЕСТНОСТИ ДЛЯ ВИРТУАЛЬНОГО МИРА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2723239C1 |
| CN 207817530 U, 04.09.2018 | |||
| HIWONDER "JETAUTO ROS ROBOT CAR POWERED BY JETSON NANO WITH LIDAR DEPTH CAMERA TOUCH SCREEN, SUPPORT SLAM MAPPING AND NAVIGATION", Найдено [26.03.2024] в сети Интернет URL: https://www.youtube.com/watch?v=vm51ssb62J4" опубл | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| US 20210181350 A1, 17.06.2021 | |||
| Автономный мобильный робототехнический комплекс | 2016 |
|
RU2632342C1 |

