Область техники, к которой относится изобретение
Изобретение относится к области относится к области авиационной техники, в частности к беспилотным летательным аппаратам вертикального взлета и посадки, и предназначено для фото- и видеосъемки и создания 3D-моделей [B64C29/00, G03B15/00, G03B 29/00].
Уровень техники
Съемка и возможность публикации или отправки фотографий и видеороликов, в том числе селфи-фото и селфи-видео, стали неотъемлемой частью современной культуры социальных медиа. Являясь способом самовыражения, съемка фото и видео помогает также развивать свои творческие способности, делиться своими эмоциями и впечатлениями, а также может стать источником вдохновения и мотивации для других людей, стимулируя их к достижению своих целей и реализации задуманных идей.
Развитие технологий способствует увеличению различных возможностей получения в результате съемки качественного, красивого, соответствующего личным представлениям о прекрасном изображения.
Так, например, известен КОМПЛЕКС ДЛЯ ФОТО- И ВИДЕОСЪЕМКИ [US2016336020 (A1), опубл. 17.11.2016], включающий беспилотный летательный аппарат (БПЛА) с фото-/видеокамерой, датчиками пространственной информации, управляемый посредством приложения, которое может быть установлено в смартфон или другое носимое устройство, а также микрофон, позволяющий осуществлять запись голоса пользователя и отслеживать местоположения пользователя. Результатом использования заявленного комплекса является возможность осуществления фото- или видеосъемки. К недостаткам данного комплекса относится необходимость управлять съемкой в режиме реального времени, что ведет к снижению качества съемки, невозможности точной реализации задуманных идей, невозможности воссоздания фотографий или видеороликов в соответствии с образцом.
Из уровня техники также известна СИСТЕМА ДЛЯ СЕЛФИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА [CN107197165(A), опубл. 22.09.2017], включающая терминал дрона с датчиками положения, терминал базовой станции и клиента, выполненные с возможностью обмена данными. При использовании данной системы после получения инструкции от терминала клиента базовая станция генерирует инструкции по сбору данных фото- или видеоизображений, включая желаемую последовательность кадров.
Однако, съемка, осуществляемая с использованием данной системы, также не лишена недостатков. Так, система позволяет дрону подниматься на определенную высоту и с использованием функции обзора автоматически находить и распознавать пользователя для осуществления его съемки. Дополнительно система может управляться жестами. И та и другая функция хотя и позволяют получить фото/видеоизображение пользователя в автоматическом или полуавтоматическом режиме, однако делает невозможным получение идеального желаемого фото- или видеоряда (или дрон снимает пользователя в автоматическом режиме, или в фото и видео отражаются жесты, требуемые для управления съемкой); кроме того, система не позволяет выбрать образец (конкретное фото или видео) и воссоздать желаемое фото или видео при съемке пользователя. Так же в указанной системе не предусмотрена обратная связь с пользователем, то есть до окончания, передачи, сохранения и просмотра результатов съемки пользователь не сможет узнать, была ли осуществлена съемка в соответствии с его пожеланиями и каковы характеристики полученных изображений.
В настоящее время существует необходимость в предложении пользователям решений, способных осуществлять репродуцирование (воссоздание) выбранного фото- или видеоизображения, которые позволяют удовлетворить потребности пользователей в самовыражении, получении изображений высокого уровня, включая особенности раскадровки, композиции, видеоряда и другие. Репродуцирование выбранных фото или видеоизображений позволяет также самостоятельно воссоздать и сохранить на память или поделиться с социумом теми изображениями, которые ранее были недоступны без профессионального фотографа, видеографа, клипмейкера, режиссера и т. д.
Известна СИСТЕМА ДЛЯ АВТОНОМНОГО ЗАХВАТА МУЛЬТИМЕДИА [US10334158 (B2), опубл. 25.06.2019], включающая мультисенсорную платформу камеры свободного полета с технологией воспроизведения желаний покупателя в целях получения требуемого фото- или видеоизображения. Известное решение включает персональное электронное устройство или смартфон, камеру свободного полета, например БПЛА, и, по меньшей мере, один сервер, где программное обеспечение и/или алгоритмы в одном или нескольких могут быть использованы для преобразования сигналов в информацию, а фотографические данные/знания могут храниться и/или обрабатываться в БПЛА, на смартфоне и/или на сервере. Указанная система может иметь базовую станцию для подзарядки и обработки видеоизображений, а также приема команд от смартфона и их передачи на БПЛА, автономную навигацию и алгоритмы прицельной съемки использованием маркеров на объекте, включая выдачу пользователю голосовых команд, включающих следование на определенное место съемки. Недостатком данной системы является отсутствие возможности автоматического задания параметров съемки по выбранному образцу, отсутствие контроля соответствия снимаемых медиаизображений образцу, отсутствие средств и способов коррекции снимаемого фото и видео путем управления действиями пользователя в процессе съемки, что приводит в конечном итоге к неудовлетворенности пользователя снятым медиа в виду низкого соответствия снятого видео или фото желаемому образцу.
Наиболее близким к предложенному решением (прототипом) является решение, описывающее ПОЛЬЗОВАТЕЛЬСКОЕ ОБОРУДОВАНИЕ, СИСТЕМУ И МЕТОД УПРАВЛЕНИЯ ДЛЯ УПРАВЛЕНИЯ ДРОНОМ [US 11579606(B2), опубл. 14.02.2023], и включающее оборудование, систему и метод управления дроном, которые позволяют фотографировать изображение или видео, идентичное или похожее на оригинальную фотографию или видео. В данном решении система управления беспилотным летательным аппаратом включает в себя беспилотный летательный аппарат, в котором установлена первая камера; и оборудование первого пользователя, способное осуществлять обмен данными с дроном и управлять движением дрона, при этом первое пользовательское оборудование анализирует данные первого видео, направляет сигнал управления, который управляет камерой для изображения, идентичного первому. При этом беспилотный летательный аппарат содержит средства измерения состояния полета.
К недостаткам известного решения относится техническая возможность системы воспроизводить только ракурс съемки (высоту, угол, фокусное расстояние, расположение объекта в кадре), что связано с отсутствием в указанной системе средств, обеспечивающих возможность замеров и анализа сведений, связанных с положением, позой, движением, мимикой пользователя, и возможность обеспечения соответствия положения, позы, мимики пользователя заданным в фото- или видеообразце, что как следует из описания известной системы лишь «дает ощущение» сходного медиаизображения и приводит к низкой точности соответствия снимаемого изображения образцу.
Раскрытие сущности изобретения
Технической проблемой, решаемой изобретением, является устранение недостатков прототипа.
Техническим результатом изобретения является повышение точности повторения заданного фото- или видеоизображения (изображения, подлежащего репродуцированию).
Указанное повышение точности объективно проявляется в получении фото- или видеоизображений, хеши которых соответствуют хешам медиа, которые подлежат репродуцированию.
Указанный технический результат достигается за счет использования комплекса для получения фото- и видеоизображения, который содержит выполненные с возможностью обмена данными коптер, базовую станцию, микрофон-маячок и смартфон пользователя, при этом
коптер выполнен с возможностью
съемки фото- и видеоизображения, позиционирования,
сканирования объектов съемки и выполнения их замеров,
приема полетного задания от базовой станции и данных о местоположении от микрофона-маячка, передачи данных, полученных при позиционировании, сканировании и выполнении замеров базовой станции и смартфону,
осуществления индикации в случае несоответствия характеристик снимаемого объекта параметрам изображения, подлежащего репродуцированию;
базовая станция выполнена с возможностью
зарядки коптера,
приема данных о выбранном варианте съемки от смартфона,
обработки и анализа данных о выбранном варианте съемки, включая формирование полетного задания и его передачу коптеру,
приема данных от коптера и их анализа на предмет соответствия параметров съемки и характеристик снимаемого объекта параметрам и характеристикам изображения или видео, подлежащего репродуцированию;
формирования и передачи управляющих сигналов коптеру и смартфону о включении индикации в случае несоответствия характеристик снимаемого объекта параметрам изображения, подлежащего репродуцированию;
хранения и обработки фото-, видео- и аудиоматериалов;
микрофон-маячок выполнен с возможностью крепления к пользователю, записи голоса пользователя и передачи аудиоданных голоса пользователя и данных о местоположении пользователя коптеру;
смартфон выполнен с возможностью
выбора фото- или видеоизображения, подлежащего репродуцированию,
передачи выбранного фото- или видеоизображения базовой станции,
приема аудиоданных от микрофона-маячка,
воспроизведения инструкций пользователю по последовательности действий для репродуцирования изображения,
осуществления индикации в случае несоответствия характеристик снимаемого объекта параметрам изображения, подлежащего репродуцированию,
хранения, обработки и передачи репродуцированных фото- или видеоизображений на выбранные удаленные сервера.
В частности, комплекса, в котором коптер представляет собой квадрокоптер, имеющий вес до 150 г.
В частности, комплекса, в котором коптер оснащен системой позиционирования, включающей оптический датчик.
В частности, комплекса, в котором система позиционирования дополнительно включает гироскоп и барометр.
В частности, комплекса, в котором коптер оснащен лазерным сканером.
В частности, комплекса, в котором коптер оснащен световыми диодами.
В частности, комплекса, в котором коптер оснащен динамиком и источником звуковых сигналов.
В частности, комплекса, в котором приложение для смартфона выполнено с возможностью воспроизведения текстовых инструкций пользователю.
В частности, комплекса, в котором приложение для смартфона выполнено с возможностью воспроизведения голосовых инструкций пользователю.
В частности, комплекса, в котором дублирование индикации коптера осуществляется приложением для смартфона посредством подачи световых и/или звуковых и/или вибросигналов.
Краткое описание чертежей
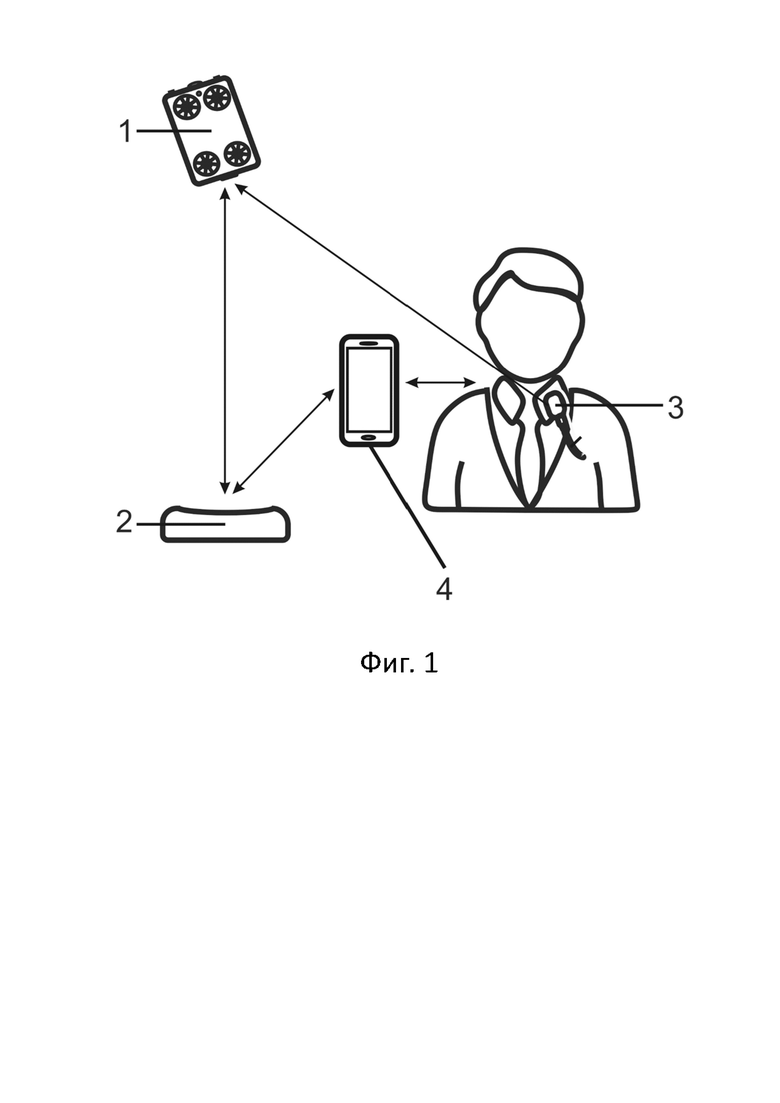
На фиг. представлен общий вид заявленного комплекса для получения фото- и видеоизображения с использованием беспилотного летательного аппарата.
На фигуре обозначено: 1 - коптер; 2 - базовая станция; 3 - микрофон-маячок; 4 - смартфон пользователя.
Осуществление изобретения
Заявленный комплекс содержит выполненные с возможностью обмена данными коптер 1, базовую станцию 2, выполненную с возможностью зарядки коптера 1, микрофон-маячок 3, выполненный с возможностью закрепления на пользователе, и смартфон 4 пользователя.
Коптер 1 представляет собой любой известный компактный мультикоптер, предпочтительно с четырьмя несущими винтами (квадрокоптер), предпочтительно весом до 150 г. Коптер 1 оснащен заряжаемой аккумуляторной батареей 5, выполненной с возможностью замены, с предпочтительной емкостью, обеспечивающей функционирование коптера 1 в течение 30 с. Небольшой вес коптера в сочетании с невысокими емкостными характеристиками батареи делают устройство компактным и легким для целей переноски и использования в любом месте в любое время.
Коптер 1 оснащен полезной нагрузкой, в частности встроенной системой позиционирования в пространстве, камерой и лазерным сканером. Перечисленные узлы позволяют коптеру избегать препятствий, контролировать свое положение в пространстве, осуществлять фото- и видеосъемку, выполнять сканирование снимаемых объектов, осуществляя замеры, оценивая положение, позу и другие характеристики снимаемого объекта.
Встроенная система позиционирования в пространстве включает в себя оптический датчик (датчик препятствий), который отслеживает смещение объектов и дает возможность удерживать положение и летать в автоматическом режиме, а также может включать гироскоп и барометр.
Информация, получаемая системой позиционирования, направляется в полетный контроллер, установленный в корпусе коптера, и далее с использованием радиосвязи, Bluetooth или Wi-Fi передается в телеметрический блок базовой станции 2.
Камера представляет собой встроенную в передней части корпуса коптера 1 фото/ видеокамеру, выполненную с возможностью записи фото- и видео в режиме реального времени и их передачи на принимающее устройство, например базовую станцию 2 или смартфон 4 пользователя через передающее устройство, например видеопередатчик, работающий через Wi-Fi.
Лазерный сканер (лидар) представляет собой компактное устройство, включающее средство генерации лазерных лучей и датчик, фиксирующий возвращение лазерного луча, оттолкнувшегося от поверхности, и измеряющий время, необходимое для возврата. Лазерный сканер предназначен для измерения размеров и расстояний между коптером и снимаемым объектом, осуществления измерения параметров объекта в целях его распознавания, определения соответствия его позы, движений или мимики заданным в фото- или видеоизображении, предназначенном для репродуцирования. Полученные измерения передаются базовой станции 2, где на их основании, в частности, оценивается необходимость изменения положения коптера 1 путем осуществления корректировки полетного задания, необходимость изменения положения, позы, мимики пользователя, в частности, путем осуществления световой и/или звуковой индикации коптера, дублирующейся в приложении, установленном на смартфон пользователя, формируются 3D-модели снимаемых коптером 1 объектов.
Коптер 1 выполнен с возможностью приема сигнала с базовой станции 2, для чего в нем размещен приемник радио- или Wi-Fi сигнала, передающий полученные сведения в контроллер коптера. В частности, коптер 1 принимает от базовой станции 2 полетное задание, основанное на сведениях, полученных путем анализа фото- или видеоизображения, предназначенного для репродуцирования.
Коптер 1 выполнен с возможность приема Wi-Fi, Bluetooth или радиосигнала от микрофона-маячка 3, что позволяет коптеру ориентироваться на объект, где расположен микрофон-маячок, осуществляя прицельную съемку.
Кроме того, коптер 1 содержит выполненные в корпусе средства световой индикации, например, светоизлучающие диоды, и/или средства подачи звукового сигнала, в частности, выполненный в корпусе динамик. При этом датчики, расположенные на коптере, постоянно оценивают изображение, подлежащее съемке, на предмет соответствия положения, позы, движения пользователя выбранному образцу; при несоответствии перечисленных выше параметров заданному образцу для удобства пользователя осуществляется индикация, например, подача светового сигнала расположенным на коптере световым индикатором, или подача звукового сигнала через расположенный на корпусе коптера динамик посредством источников звуковых сигналов, например предустановленных аудиофайлов.
Базовая станция 2 представляет собой посадочную платформу, с расположенной на ней зарядной платформой, выполненной с возможностью физического контакта с контактными элементами аккумуляторной батареи 5, установленной в коптер 1, для ее подзарядки при посадке коптера на посадочной платформе.
Базовая станция 2 выполнена с возможностью подключения к электрической сети или питания от собственных батарей.
Базовая станция 2 содержит телеметрический блок, принимающий сведения от системы позиционирования коптера, который связан с аналитическим блоком базовой станции 2, содержащим процессор, и принимающим информацию от приложения смартфона 4 пользователя, телеметрического блока базовой станции, лазерного сканера коптера; хранящим варианты программ полетов; формирующим полетные задания и направляющим команды полетному контроллеру коптера для реализации выбранных программ; оценивающим соответствие положения, позы и мимики пользователя заданным в изображении, подлежащем репродуцированию, и формирующим команды для выполнения световой и/или звуковой индикации коптера при несоответствии вышеуказанных параметров заданным, а также направляющим в приложение, установленное на смартфоне 4 пользователя сведения, о необходимости дублирования световой и/или звуковой индикации; устройство приема-передачи и обработки фото/видеоизображения, обеспечивающее получение фото/видеоданных с коптера 1, их обработку, включая стирание из ролика шума полета квадрокоптера путем фильтрации диапазонов частоты этого шума, и передачу в смартфон 4 пользователя посредством Wi-Fi, Bluetooth или сети Интернет. При этом при оценке соответствия положения, позы, мимики пользователя и других характеристик снимаемого объекта заданным учитываются данные сканирования и осуществления измерений лазерным сканером, а при оценке соответствия положения коптера - данные, получаемые встроенной системой позиционирования. Перечисленные данные обрабатываются процессором аналитического блока базовой станции 2, в частности путем сравнения с данными изображения, подлежащего репродуцированию. Сравнение кадра, получаемого при съемке, с кадром – эталоном (то есть соответствующим кадром репродуцируемого изображения) осуществляется, например, путем сравнения хеша изображений, а именно подсчета количества отличающихся позиций между двумя хешами (расстояние Хэмминга). Чем расстояние меньше - тем больше совпадение, при отсутствии отличающихся позиций между двумя хешами – изображения 100% идентичны. При этом работа процессора настроена таким образом, чтобы идентичность каждого кадра снимаемого изображения составляла не менее 90%. В случаях, когда кадр имеет меньшую идентичность, в аналитическом блоке базовой станции 2 формируются и направляются к исполнительным устройствам команды для изменения положения коптера, воспроизведения инструкций пользователю по действиям, связанным с тем, как пользователю следует изменить положение, позу и т.д.; осуществления индикации.
Сравнение может проводиться как для каждого кадра, так и для каждого N-ного кадра, причем величина N обратно пропорциональна точности репродуцирования видео.
Микрофон-маячок 3 представляет собой компактное устройство для записи голоса пользователя с различными вариантами крепления, например к одежде пользователя, в частности путем использования зажима или магнитного крепления. Микрофон-маячок 3 оснащен средством передачи данных о местоположении пользователя коптеру 1, например посредством Wi-Fi, Bluetooth или радиосигнала.
Смартфон пользователя содержит экран, например, сенсорный, средства ввода информации, например виртуальную клавиатуру, микрофон для голосового ввода информации с дальнейшим преобразованием голоса в текст, или стилус, средства вывода звука, например, динамики, или аудиоразъем для проводных наушников или Bluetooth-наушники, средство для осуществления вибрации, например, вибромотор, средство для приема/передачи информации базовой станции, средство формирования световых сигналов пользователю.
На смартфон 4 пользователя установлено приложение, выполненное с возможностью выбора режима работы коптера 1, в том числе путем демонстрации образца медиа и выбора фото- или видеоаналога, а также выбора режимов сканирования тела, или лица, или помещения или иных предметов. Сведения о выбранном режиме работы из приложения поступают в аналитический блок базовой станции для формирования и передачи полетного задания контроллеру коптера 1. Кроме того, приложение выполнено с возможностью текстового или голосового отображения инструкций для пользователя по реализации последовательности действий для получения фото или видеоряда подобного выбранному или для осуществления последовательности действий по сканированию лица, или тела, или помещения или иных предметов; а также с возможностью обработки полученного видео, включая стирание из ролика шума полета коптера путем фильтрации диапазонов частоты этого шума; демонстрации пользователю результата съемки, сохранения результата съемки в памяти базовой станции или в памяти смартфона, отправки результата съемки в социальные сети. Приложение выполнено с возможностью дублирования световой и/или звуковой индикации коптера в случае несоответствия положения, позы, мимики пользователя заданному образцу путем подачи световых и/или звуковых сигналов и/или вибрации.
Комплекс может содержать дополнительные маячки, оснащенные средством передачи данных о местоположении коптеру 1, например посредством Wi-Fi, Bluetooth или радиосигнала, которые используются при создании 3D-модели помещения.
В результате работы комплекса осуществляются следующие способы съемки:
Пользователь включает и устанавливает базовую станцию 2 с расположенным на ней коптером 1 на расстоянии 1,5-2,5 метров от объекта съемки так, чтобы в радиусе 1,5 метров от неё было открытое пространство. Фиксирует на себе микрофон-маячок 3. Через приложение смартфона 4 выбирает из множества роликов понравившийся ролик или фото, похожие на которые он хочет получить со своим участием. Приложение, установленное на смартфоне 4, направляет сведения о выбранном ролике на базовую станцию 3. Базовая станция 3 анализирует изображение, предназначенное для репродуцирования, и формирует полетное задание, в котором перемещения коптера 1 между заданными точками обеспечивают точное воспроизведение ракурсов и последовательности съемки понравившегося изображения. Базовая станция 3 передает коптеру 1 координаты точек и последовательность выполнения полетного задания. Коптер 1 в автоматическом режиме взлетает с базовой станции и с помощью камеры производит съемку по полученному заданию. В процессе съемки приложение смартфона 4 демонстрирует на экране текстовую инструкцию или обеспечивает голосовое воспроизведение указаний, содержащих последовательность действий пользователя: какие позы принимать, как двигаться, куда смотреть, какую мимику выражать. При этом датчики, расположенные на коптере, постоянно оценивают изображение, подлежащее съемке, на предмет соответствия положения, позы, движения пользователя выбранному образцу, осуществляя необходимые замеры для оценки соответствия параметров заданным изображением, подлежащим репродуцированию; при несоответствии вышеперечисленных параметров заданному образцу для удобства пользователя осуществляется индикация, например, подача светового сигнала расположенным на коптере световым индикатором, или подача звукового сигнала через расположенный на корпусе коптера динамик. Для удобства пользователя и обеспечения быстроты его реакции индикация коптера 1 также дублируется через приложение смартфона 4.
В процессе съемки микрофон-маячок обеспечивает звуковую запись, а также через установленное в нем устройство приема-передачи информации передает на коптер 1 сведения о местоположении пользователя, обеспечивая тем самым прицельную съемку. Система позиционирования обеспечивает коррекцию положения коптера в пространстве.
По окончанию полетного задания коптер 1 в автоматическом режиме возвращается на базовую станцию 2, которая осуществляет зарядку аккумуляторной батареи. После возврата на базовую станцию 2 аккумуляторная батарея может быть вручную заменена сменной аккумуляторной батареей для того, чтобы сразу приступить к следующей съемке.
Снятый ролик коптер 1 передает на базовую станцию 2, где происходит его обработка, и базовая станция 2 обеспечивает передачу ролика на смартфон 4 пользователя.
Приложение обеспечивает демонстрацию готового ролика пользователю на экране смартфона 4 пользователя, а также возможность его сохранения в памяти базовой станции 2 или в памяти смартфона 4 и/или отправляет, например, в социальные сети.
Кроме того, пользователь через приложение в смартфоне 4 может выбрать в качестве задания сканирование тела, лица или помещения.
Для сканирования тела пользователь фиксирует на себе микрофон-маячок 3. Базовая станция 2 получает задание по сканированию, формирует полетный план и передает его коптеру 1. Коптер 1 в автоматическом режиме взлетает с базовой станции 2 и выполняет полетное задание. В процессе выполнения полетного задания коптер, используя лазерный сканер, производит замеры параметров всех частей тела человека для получения 3D-модели - аватара человека. В процессе съемки микрофон-маячок 3 через установленное в нем устройство приема-передачи информации передает на коптер 1 сведения о местоположении пользователя, обеспечивая тем самым прицельную съемку. Система позиционирования обеспечивает коррекцию положения коптера в пространстве. В процессе съемки приложение смартфона 4 демонстрирует на экране текстовую инструкцию или обеспечивает голосовое воспроизведение указаний, содержащих последовательность действий пользователя, а именно последовательность принимаемых поз. При этом датчики, расположенные на коптере, постоянно оценивают изображение, подлежащее съемке, на предмет соответствия положения, позы пользователя необходимому для выполнения замеров; при несоответствии вышеперечисленных параметров требуемым для удобства пользователя осуществляется индикация, например, подача светового сигнала расположенным на коптере световым индикатором, или подача звукового сигнала через расположенный на корпусе коптера динамик. Для удобства пользователя и обеспечения быстроты его реакции индикация коптера 1 также дублируется через приложение смартфона 4.
После выполнения полетного задания и осуществления всех замеров коптер 1 в автоматическом режиме возвращается на базовую станцию 2, которая осуществляет зарядку аккумуляторной батареи. В случае необходимости аккумуляторная батарея может быть вручную заменена сменной аккумуляторной батареей.
Коптер 1 передает все замеры на базовую станцию 2, где происходит их обработка и формирование 3D-модели тела человека, с последующей ее передачей на смартфон 4 пользователя.
Приложение обеспечивает демонстрацию готовой 3D-модели тела человека пользователю на экране мобильного смартфона, а также возможность ее сохранения в памяти базовой станции 2 или в памяти мобильного смартфона 4 и/или отправляет в социальные сети.
Видеосъемка для сканирования мимики отличается от сканирования тела тем, что осуществляется съемка лица. При этом съемка производится при выражении различных эмоций и при произношении фраз. Приложение обеспечивает текстовое или голосовое воспроизведение указаний по последовательности выражения эмоций или проговаривания фраз. При этом датчики, расположенные на коптере, постоянно оценивают изображение, подлежащее съемке, на предмет соответствия мимики необходимой для выполнения замеров; при несоответствии параметров требуемым для удобства пользователя осуществляется индикация, например, подача светового сигнала расположенным на коптере световым индикатором, или подача звукового сигнала через расположенный на корпусе коптера динамик. Для удобства пользователя и обеспечения быстроты его реакции индикация коптера 1 также дублируется через приложение смартфона 4. В результате съемки формируют 3D-модель аватара лица человека.
Видеосъемка для сканирования помещения отличается от предыдущих вариантов сканирования тем, что при необходимости пользователь устанавливает дополнительные маяки на границе помещения. В результате съемки формируют 3D-модель помещения.
Технический результат - повышение точности повторения заданного фото- или видеоизображения – достигается за счет того, что предложенный комплекс автоматически анализирует все параметры изображения, предназначенного для репродуцирования, генерируя необходимые сведения для последовательного воспроизведения как параметров съемки (ракурса, высоты, фокусного расстояния, угла съемки и др.), так и необходимых инструкций пользователю по последовательности действий, принятию поз, выражению мимики, наряду с контролем воспроизведения данных инструкций и осуществлением обратной связи с пользователем путем двойной индикации – на коптере и через приложение в смартфоне пользователя.
Для оценки точности повторения заданных фото- и видеообразцов был проведен эксперимент по получению изображений, соответствующих заданным, с использованием комплексов для получения изображений, описанных в ближайшем аналоге предложенного комплекса (комплекс А) и в заявленном комплексе (комплекс Б).
В обоих комплексах в качестве коптера использовался квадрокоптер весом 149 гр, несущий одинаковую полезную нагрузку в виде камеры, осуществляющей фото- и видеосъемку, встроенной системой позиционирования в пространстве, которая включала оптический датчик и гироскоп. Коптеры были оснащены заряжаемой аккумуляторной батареей 5, выполненной с возможностью замены, с емкостью, обеспечивающей функционирование коптера в течение 30 с. Камера была встроена в переднюю часть корпуса коптера и выполнена с возможностью записи фото и видео в режиме реального времени и его передачи на базовую станцию 2 через видеопередатчик, работающий через Wi-Fi.
Комплекс Б дополнительно содержал лазерный сканер, выполненный с возможностью передачи измерений в аналитический блок базовой станции.
Кроме того, комплекс Б дополнительно содержал микрофон-маячок, а коптер был выполнен с возможностью приема радиосигнала от микрофона-маячка.
Корпус коптера комплекса Б был оборудован светоизлучающими диодами, осуществлявшими световую индикацию пользователю при несоответствии положения, позы, движений или мимики таковым в видеообразце.
Базовая станция комплекса Б содержала телеметрический блок, принимающий сведения от системы позиционирования коптера, который связан с аналитическим блоком, принимающим информацию от приложения смартфона пользователя, телеметрического блока базовой станции, лазерного сканера коптера; хранящим варианты программ полетов; формирующим полетные задания и направляющим команды полетному контроллеру коптера для реализации выбранных программ; устройство приема-передачи и обработки фото/видеоизображения, обеспечивающее получение фото/видеоданных с коптера, их обработку, включая стирание из ролика шума полета квадрокоптера путем фильтрации диапазонов частоты этого шума, и передачу в смартфон пользователя посредством Wi-Fi.
Микрофон-маячок крепился к одежде пользователя благодаря магнитному креплению. Микрофон – маячок был оснащен средством передачи данных о местоположении пользователя коптеру посредством радиосигнала.
На смартфон пользователей были установлены соответствующие приложения для комплексов А и Б. Приложение комплекса Б включало функции выбора видеоаналога. Сведения о выбранном режиме работы из приложения поступали в аналитический блок базовой станции для формирования и передачи полетного задания контроллеру коптера. При выполнении эксперимента была выбрана опция голосового отображения инструкций для пользователя по реализации последовательности действий для получения видеоряда подобного выбранному видео аналогу. Приложение имело возможность обработки полученного видео, включая стирание из ролика шума полета коптера путем фильтрации диапазонов частоты этого шума; демонстрации пользователю результата съемки, сохранения результата съемки в памяти базовой станции или в памяти смартфона, отправки результата съемки в социальные сети. Кроме того, приложение осуществляло дублирование световой индикации коптера в случае несоответствия положения, позы, мимики пользователя заданному образцу.
Результаты проведенного эксперимента оценивались по параметрам, характеризующим как соответствие качественных характеристик видео (кадрирование – соответствие ракурса, угла, высоты съемки) заданному образцу, так и соответствие снимаемого динамического ряда (движений пользователя, поз, мимики) видеоаналогу.
Результаты оценки представлены в табл. 1, где в «%» приведены значения соответствия показателей видеоаналогу. «%» рассчитывался по количеству совпадающих хешей кадров, соответствующих хешам аналогов, сравнению ключевых кадров видеоаналога и снимаемого видео, анализу характеристик движения в видео, таких как скорость, угол поворота. В таблице приведены средние данные.
Таблица 1
Проведенный эксперимент продемонстрировал значительное повышение точности кадрирования видео в соответствии с заданным образцом, точности воспроизведения поз, движений и мимики.
Полученные данные свидетельствуют о повышение точности повторения заданного фото- или видеоизображения по сравнению с прототипом.
Комплекс для получения фото- и видеоизображений содержит выполненные с возможностью обмена данными коптер, базовую станцию, микрофон-маячок и смартфон. Коптер содержит оборудование для фото- и видеосъемки. Базовая станция дополнительно содержит устройство зарядки коптера. Обеспечивается повышение точности повторения заданного фото- или видеоизображения (изображения, подлежащего репродуцированию). 9 з.п. ф-лы, 1 ил., 1 табл. 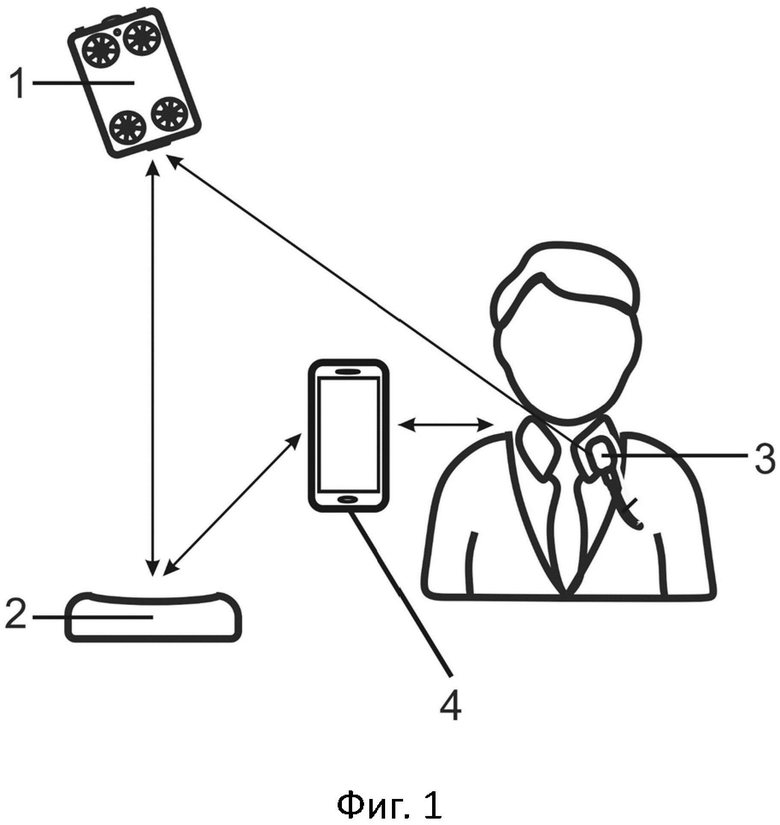
1. Комплекс для получения фото- и видеоизображений, содержащий выполненные с возможностью обмена данными коптер, базовую станцию, микрофон-маячок и смартфон пользователя, при этом коптер выполнен с возможностью съемки фото- и видеоизображения, позиционирования, сканирования объектов съемки и выполнения их замеров, приема полетного задания от базовой станции и данных о местоположении от микрофона-маячка, передачи данных, полученных при позиционировании, сканировании и выполнении замеров, базовой станции и смартфону, осуществления индикации в случае несоответствия характеристик снимаемого объекта параметрам изображения, подлежащего репродуцированию; базовая станция выполнена с возможностью зарядки коптера, приема данных о выбранном варианте съемки от смартфона, обработки и анализа данных о выбранном варианте съемки, включая формирование полетного задания и его передачу коптеру, приема данных от коптера и их анализа на предмет соответствия параметров съемки и характеристик снимаемого объекта параметрам и характеристикам изображения или видео, подлежащего репродуцированию; формирования и передачи управляющих сигналов коптеру и смартфону о включении индикации в случае несоответствия характеристик снимаемого объекта параметрам изображения, подлежащего репродуцированию; хранения и обработки фото-, видео- и аудиоматериалов; микрофон-маячок выполнен с возможностью крепления к пользователю, записи голоса пользователя и передачи аудиоданных голоса пользователя и данных о местоположении пользователя коптеру; смартфон выполнен с возможностью выбора фото- или видеоизображения, подлежащего репродуцированию, передачи выбранного фото- или видеоизображения базовой станции, приема аудиоданных от микрофона-маячка, воспроизведения инструкций пользователю по последовательности действий для репродуцирования изображения, осуществления индикации в случае несоответствия характеристик снимаемого объекта параметрам изображения, подлежащего репродуцированию, хранения, обработки и передачи репродуцированных фото- или видеоизображений на выбранные удаленные сервера.
2. Комплекс по п. 1, в котором коптер представляет собой квадрокоптер, имеющий вес до 150 г.
3. Комплекс по п. 1, в котором коптер оснащен системой позиционирования, включающей оптический датчик.
4. Комплекс по п. 1, в котором система позиционирования дополнительно включает гироскоп и барометр.
5. Комплекс по п. 1, в котором коптер оснащен лазерным сканером.
6. Комплекс по п. 1, в котором коптер оснащен световыми диодами.
7. Комплекс по п. 1, в котором коптер оснащен динамиком и источником звуковых сигналов.
8. Комплекс по п. 1, в котором приложение для смартфона выполнено с возможностью воспроизведения текстовых инструкций пользователю.
9. Комплекс по п. 1, в котором приложение для смартфона выполнено с возможностью воспроизведения голосовых инструкций пользователю.
10. Комплекс по п. 1, в котором дублирование индикации коптера осуществляется приложением для смартфона посредством подачи световых, и/или звуковых, и/или вибросигналов.
| US 20200053256 A1, 13.02.2020 | |||
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ И ОБОРУДОВАНИЕ | 2019 |
|
RU2794062C2 |
| УСТРОЙСТВО, СПОСОБ И СИСТЕМА ДЛЯ РЕКОНСТРУКЦИИ 3D-МОДЕЛИ ОБЪЕКТА | 2015 |
|
RU2642167C2 |
| СПОСОБ, АППАРАТУРА И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ И ИЗОБРАЖЕНИЯ | 2019 |
|
RU2791810C2 |
| US 11579606 B2, 14.02.2023. | |||

