Изобретение относится к области авиационной техники, а именно к комплексам управления информационно-исполнительными системами бортового оборудования, общесамолетным оборудованием и беспилотным летательным аппаратом. Изобретение может быть использовано на малоразмерных беспилотных летательных аппаратах для повышения автономности применения и реализации их группового взаимодействия при решении задач по предназначению.
Из уровня техники известен интегрированный комплекс бортового оборудования многофункционального самолета (патент RU № 2488775, опубликованный 27.07.2013, МПК GO 1С 23/00), в котором в интегрированный комплекс бортового оборудования многофункционального самолета объединены:
- прицельно-навигационный комплекс интегрированной радиотехнической системы;
- интегрированная оптико-электронная система;
- интегрированный комплекс средств связи;
- радиолокационная система;
- система радиотехнической разведки и радиоэлектронного подавления;
- комплект аппаратуры гос. опознавания и связные радиостанции;
- информационно-управляющая система.
В данном техническом решении комплекс бортового оборудования и информационно-управляющая система включительно функционирует только при постоянном взаимодействии с экипажем, что приводит к следующим недостаткам:
- отсутствие автономности функционирования (необходимость задействования экипажа в управлении) приводит к повышению нагрузки на экипаж, что снижает надежность и быстродействие комплекса бортового оборудования;
- необходимость обеспечения комфортной работы экипажа.
Известна интеллектуальная система технического зрения беспилотного летательного аппарата для решения задач навигации, построения трехмерной карты окружающего пространства и препятствий и автономного патрулирования (патент RU 195749, опубликованный 05.02.2020, МПК В64С 13/10, D64C 19/02, G01C 23/00), состоящая из бортового вычислителя на основе одноплатного компьютера с платой расширения на базе 32-разрядного контроллера, инерционного измерительного блока, позволяющего определить положение беспилотного летательного аппарата в пространстве и включающего в себя гироскоп, акселерометр, барометр, бортовой видеокамеры, RGB-D-камеры, полетного контроллера, приемника радиосигналов, вращающегося лазерного дальномера, стационарного лазерного дальномера, интерфейсов подключения устройств управления движением, интерфейсов подключения внешних датчиков.
В качестве недостатков данного технического решения можно указать низкую точность определения координат (5% из 100), не позволяющую решать задачу наведения, а также отсутствие возможности группового взаимодействия однотипных беспилотных летательных аппаратов (далее -БИЛА).
Решаемая предлагаемым изобретением задача состоит в реализации интегрированного комплекса бортового оборудования БИЛА, обеспечивающего решение задачи автономного применения как одиночных малоразмерных БПЛА, так и при групповом применении группы однотипных БПЛА.
Поставленная задача решается организацией информационного взаимодействия между вычислителями бортовой системы управления и бортовой интеллектуальной системы поиска и наведения посредством информационных каналов с распределением между ними решаемых задач по управлению БПЛА.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в повышении эффективности применения малоразмерного БПЛА за счет реализации режимов автономного применения БПЛА одиночно и в группе однотипных летательных аппаратов, а также в расширении функциональных возможностей БПЛА.
Интегрированный комплекс бортового оборудования малоразмерного беспилотного летательного аппарата содержит взаимосоединенные по каналам информационного обмена помехозащищенный приемник космических навигационных систем, систему автоматического управления двигателем, радиовысотомер, бортовую систему управления; обще самолетное оборудование, бортовую интеллектуальную систему поиска и наведения, состоящую из модуля вычислительного и камеры обзорной, радиосвязное оборудование, состоящее из модуля защиты радиолиний, командной радиолинии дециметрового диапазона частот, включающей модем командной радиолинии и антенную систему, высокоскоростную радиолинию дециметрового диапазона частот, включающую модем высокоскоростной радиолинии, усилитель мощности и антенную систему. Модуль вычислительный выполнен на базе нейронного процессора на основе интегральной схемы для работы алгоритмов нейронной сети и обеспечивает решение задач поиска, обнаружения и наведения наземной цели заданного типа с принятием решения об атаке цели автоматически или по команде оператора наземного пункта управления. Бортовая система управления содержит магнитометр, гироскопы-акселерометры и датчики абсолютного и дифференциального давления и обеспечивает управляемый полет по заданному маршруту с формированием команд по управлению режимами летательного аппарата.
Приведенный технический результат достигается за счет того, что в бортовой интеллектуальной системе поиска и наведения (далее - БИСПН) производится комплексный анализ информации, поступающей от обзорной камеры, бортовой системы управления и через радиосвязное оборудование от однотипных БПЛА при групповом применении.
Повышение эффективности применения малоразмерного БПЛА за счет реализации режимов автономного применения БПЛА одиночно и в группе однотипных летательных аппаратов достигается следующими решениями:
- реализация в БИСПН нейросетевых алгоритмов поиска, распознавания наблюдаемых наземных целей, определение координат обнаруженных целей с использованием информации из бортовой системы управления (далее - БСУ) о координатах и угловом положении малоразмерного БПЛА;
- реализация в программном обеспечении БИСПН алгоритма, обеспечивающего назначение приоритетной цели из массива распознанных целей за счет заданных полетным заданием приоритетов типов целей, назначенных для поиска;
- реализации в программном обеспечении БИСПН алгоритма, обеспечивающего принятия решения о поражении приоритетной наземной цели на базе приоритетов типов целей и правил поведения (разрешена или запрещена автоматическая атака, атака первой обнаруженной цели или атака после пролета зоны поиска).
Расширения функциональных возможностей малоразмерного БПЛА достигаются следующими решениями:
- реализации с использованием БИСПН и радиосвязного оборудования единого информационно-целевого пространства группы однотипных БПЛА;
- реализации в программном обеспечении БИСПН ведущего БПЛА алгоритма динамического назначения районов поиска для каждого БПЛА группы за счет назначения зон поиска для каждого БПЛА группы и автоматического формирования маршрута полета в зоне поиска каждым БПЛА группы;
- реализации в программном обеспечении БИСПН алгоритма для динамического целераспределения обнаруженных и распознанных целей между БПЛА группы.
Предлагаемый изобретением интегрированный комплекс бортового оборудования малоразмерного БПЛА выполняет:
а) формирование сигналов управления движением БПЛА в продольном, боковом, путевом каналах, в каналах высоты и скорости в автоматическом режиме по заданному полетным заданием маршруту за счет интеграции в состав БСУ магнитометра, гироскопов-акселерометров, датчиков абсолютного и дифференциального давления;
б) поиск, распознавание и определение координат заданных полетным заданием наземных целей в заданном районе за счет применения нейросети, установленной в модуле вычислительном (далее - MB) БИСПН, и информации о координатах и угловом положении БПЛА, рассчитанных в БСУ;
в) автоматическое или по команде от оператора назначение цели для поражения, которое обеспечивается алгоритмом, реализованным в программном обеспечении БИСПН и обеспечивающим автоматическое назначение приоритетной цели из массива распознанных целей за счет заданных полетным заданием приоритетов типов целей или поступившей посредством радиосвязного оборудования (далее - РСО) командой выбора цели оператора наземного пункта управления (далее - НПУ), при этом обеспечивается приоритет команды оператора;
г) автоматическое или по команде от оператора принятие решения на поражения цели, в том числе резервной, которое обеспечивается алгоритмом, реализованным в программном обеспечении БИСПН и обеспечивавшим формирование решения на базе приоритетов типов целей и правил поведения (разрешена или запрещена автоматическая атака, атака первой обнаруженной цели или атака после пролета зоны поиска) и в БСУ или поступившей посредством РСО командой оператора НПУ, при этом обеспечивается приоритет команды оператора;
д) автоматическое наведение БПЛА на наземные неподвижные и движущиеся цели, которое обеспечивается за счет определения в БИСПН угловых отклонений положения наземной цели относительно строительной горизонтали фюзеляжа БПЛА, передачи их в БСУ для реализации траектории наведения;
е) реализация вариативного поведения БПЛА, которое осуществляется за счет включения в полетное задание систем комплекса бортового оборудования (далее - КБО) масок поведения, включающих и отключающих режимы работы программного обеспечения на различных этапах полета БПЛА;
ж) реализация роевого взаимодействия в группе, которое реализуется за счет информационного обмена системами КБО каждого БПЛА группы посредством радиосвязного оборудования.
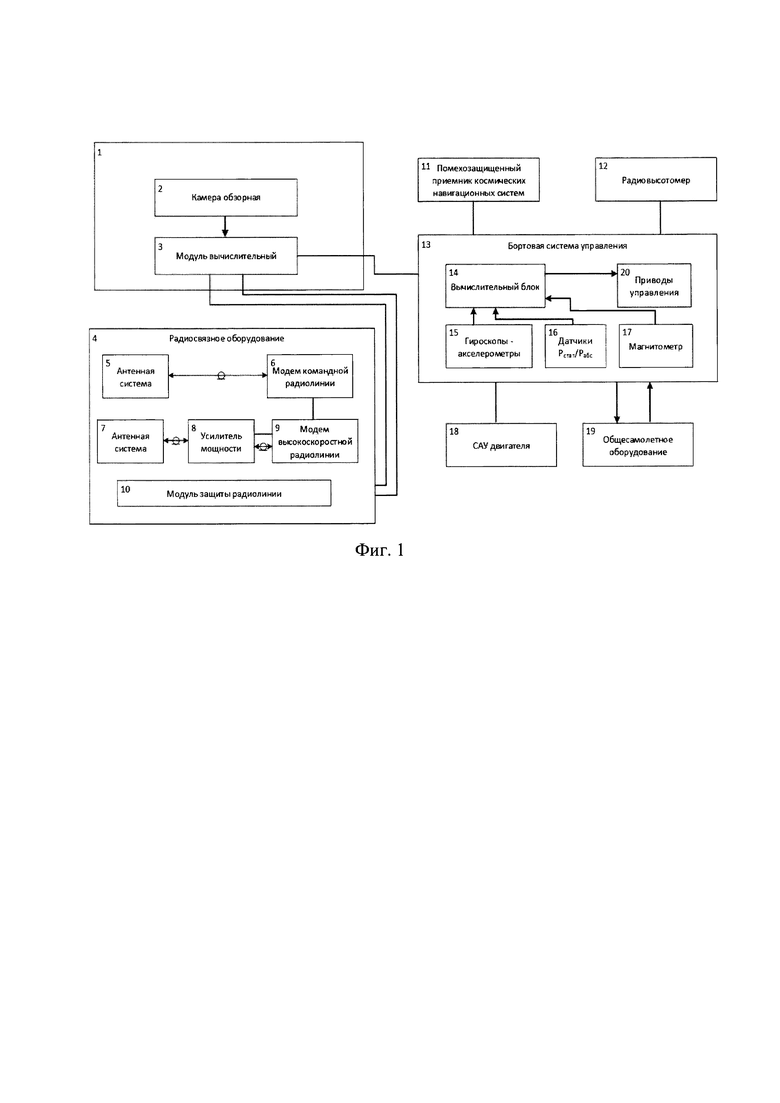
Предлагаемое изобретение поясняется чертежом (фиг. 1), на котором представлена блок-схема интегрированного комплекса бортового оборудования малоразмерного беспилотного летательного аппарата, где позициями обозначены следующие составные части:
БИСПН (1) в составе камеры обзорной (2) и модуля вычислительного (3), обеспечивающая обзор земной поверхности, поиск и обнаружение наземных целей заданного в полетном задании типа, определение их координат, выбор наземной цели для атаки и формирование информации в БСУ для наведения на нее БПЛА с целью ее поражения. Одновременно БИСПН обеспечивает управление радиосвязным оборудованием, а также полетный и наземный контроль бортовых систем БПЛА.
Радиосвязное оборудование (далее - РСО) (4), которое состоит из: антенной системы (далее - АС) командной радиолинии (5), модема (6) командной радиолинии (далее - МКРЛ), АС высокоскоростной радиолинии (7), усилителя мощности (далее - УМ) (8), модема высокоскоростной радиолинии (далее - МВРЛ) (9), модуля защиты радиолиний (далее -МЗРЛ) (10) и обеспечивает передачу из БПЛА на наземный или воздушный пункт управления по высокоскоростной радиолинии видеоизображения от обзорной камеры БИСПН с выделением обнаруженных наземных целей, а также информацию о параметрах полета, координатах БПЛА и обнаруженных наземных целях по командной радиолинии, передачу команд управления, в том числе выбранной для поражения наземной цели, от НПУ на БПЛА по командной радиолинии.
Помехозащищенный приемник космических навигационных систем (11) обеспечивает определение местоположения БПЛА в земной системе координат.
Радиовысотомер (12) обеспечивает определение высоты летательного аппарата относительно подстилающей поверхности.
Бортовая система управления (13), состоящая из вычислительного блока (14), гироскопов-акселерометров (15), датчиков Рстат/Рабс (16), магнитометра (17) и приводов управления (20), обеспечивающая формирование в вычислительном блоке по данным о пространственном положении и параметрах движения летательного аппарата, поступающих от гироскопов-акселерометров, магнитометра, датчиков Рстат/Рабс, сигналов управления движением БПЛА в продольном, боковом, путевом каналах, в каналах высоты и скорости в автоматическом режиме по заданному полетным заданием маршруту и выдачу их в приводы управления и САУ двигателя для реализации управляемого движения БПЛА.
САУ двигателем (18) обеспечивает управление работой двигателя БПЛА.
Общесамолетное оборудование (19) состоит из систем раскладки крыла и хвостового оперения и системы электроснабжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| Устройство радиоэлектронного подавления беспилотных летательных аппаратов в зенитно-ракетном комплексе ближнего действия | 2023 |
|
RU2820537C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2019 |
|
RU2767938C2 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2022 |
|
RU2791341C1 |
| БЕСПИЛОТНЫЙ УДАРНО-РАЗВЕДЫВАТЕЛЬНЫЙ АВИАНОСИТЕЛЬ | 2023 |
|
RU2829114C1 |
| СПОСОБ БОРЬБЫ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ БЛИЖНЕГО И МАЛОГО РАДИУСА ДЕЙСТВИЯ С ПОМОЩЬЮ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ДЕЦИМЕТРОВОГО ДИАПАЗОНА ДЛИН ВОЛН | 2013 |
|
RU2551821C1 |
| АВИАКОМПЛЕКС БОЕВОЙ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2023 |
|
RU2827270C1 |
| КОНВЕРТИРУЕМЫЙ ДВУХКИЛЕВОЙ ДОЗВУКОВОЙ САМОЛЕТ ТРЕХВАРИАНТНОГО БАЗИРОВАНИЯ | 2024 |
|
RU2833909C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
Изобретение относится к области авиационной техники и может применяться на малоразмерных беспилотных летательных аппаратах (БПЛА). Сущность технического решения заключается в следующем. Интегрированный комплекс бортового оборудования малоразмерного БПЛА содержит взаимосоединенные по каналам информационного обмена помехозащищенный приемник космических навигационных систем, систему автоматического управления двигателем, радиовысотомер, бортовую систему управления; общесамолетное оборудование, бортовую интеллектуальную систему поиска и наведения, состоящую из модуля вычислительного и камеры обзорной, радиосвязное оборудование, состоящее из модуля защиты радиолиний, командной радиолинии дециметрового диапазона частот, включающей модем командной радиолинии и антенную систему, высокоскоростную радиолинию дециметрового диапазона частот, включающую модем высокоскоростной радиолинии, усилитель мощности и антенную систему, при этом модуль вычислительный выполнен на базе нейронного процессора на основе интегральной схемы для работы алгоритмов нейронной сети. Техническим результатом заявленного изобретения является расширение функциональных возможностей БПЛА. 1 ил.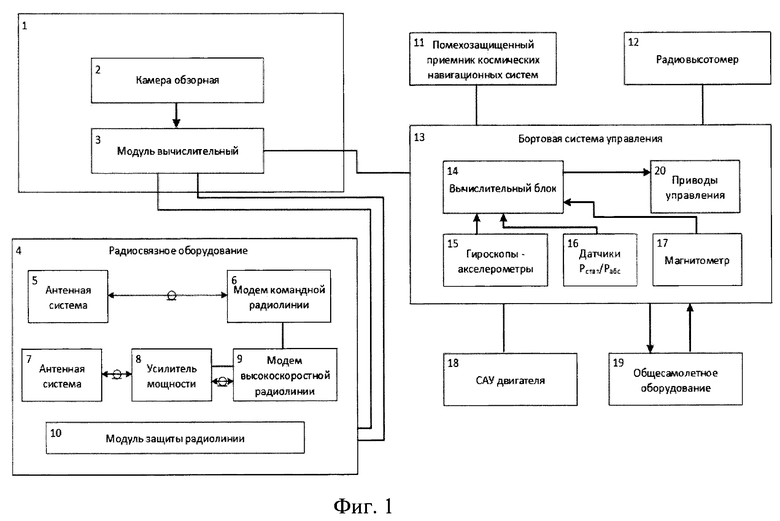
Интегрированный комплекс бортового оборудования малоразмерного беспилотного летательного аппарата, характеризующийся тем, что содержит взаимосоединенные по каналам информационного обмена бортовую систему управления, связанную с общесамолетным оборудованием, радиовысотомером, помехозащищенным приемником космических навигационных систем, системой автоматического управления двигателем, бортовой интеллектуальной системой поиска и наведения, состоящей из модуля вычислительного, связанного с камерой обзорной; соединённое с бортовой интеллектуальной системой поиска и наведения радиосвязное оборудование, состоящее из модуля защиты радиолиний, командной радиолинии дециметрового диапазона частот, включающей модем командной радиолинии и антенную систему, высокоскоростной радиолинии дециметрового диапазона частот, включающей модем высокоскоростной радиолинии, усилитель мощности и антенную систему, при этом модем командной радиолинии связан с модемом высокоскоростной радиолинии, а модуль вычислительный выполнен на базе нейронного процессора на основе интегральной схемы для работы алгоритмов нейронной сети и обеспечивает решение задач поиска, обнаружения и наведения наземной цели заданного типа с принятием решения об атаке цели автоматически или по команде оператора наземного пункта управления, кроме того, бортовая система управления содержит вычислительный блок, магнитометр, гироскопы-акселерометры и датчики абсолютного и дифференциального давления и обеспечивает управляемый полет по заданному маршруту с формированием команд по управлению режимами летательного аппарата.
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| БУНКЕР ХЛОПКОУБОРОЧНОЙ МАШИНЫ | 0 |
|
SU195749A1 |
| US 11815592 B2, 14.11.2023 | |||
| US 11221634 B2, 11.01.2022 | |||
| US 20170146990 A1, 25.05.2017. | |||

