Изобретение относится к упаковочному оборудованию, а именно к устройствам для упаковки различных объектов (изделий, предметов, товаров) путем их завертывания (обертывания) в упаковочный (оберточный) материал, преимущественно, в растягивающуюся полимерную пленку, также называемую стрейч-пленкой. Подобные устройства используют для упаковки объектов (изделий), подлежащих транспортировке, с целью обеспечения простоты транспортирования и защиты их поверхностей от загрязнений и повреждений.
В процессе упаковывания необходимо обеспечивать постоянство параметров обмотки (облегание пленки, степень ее натяжении на самом объекте, степень обжатия объекта и т.п.). Эти важные для качества упаковывания параметры в полной мере достигаются при управляемом (непосредственно при упаковывании) натяжении пленки. На качество упаковывания оказывает влияние ряд изменяющихся в процессе упаковывания факторов - параметры пленки (тип ленки - первичное изготовление, вторичное изготовление, гибридное изготовление), усилие сматывания пленки - варьируется в широком пределе в зависимости от параметров клеящего слоя и качества пленки, параметры растяжения пленки, параметры прилипания пленки и т.д., свойств упаковываемого объекта (мягкий, крепкий, широкий, высокий, сложной геометрической формы и т.д.), режимы упаковывания (скорость вращения объекта, скорость вертикальной подачи пленки и т.д.). Известные системы с постоянным (неуправляемым) натяжением пленки, в одном из вариантов реализации, затормаживают непосредственно картонную втулку бобины, что приводит к тому, что сила натяжения меняется в процессе сматывания пленки с втулки, в том числе, за счет измерения наружного диаметра (радиуса сматываемого слоя) бобины. То есть, при постоянном моменте затормаживания, меняется сила натяжения пленки в процессе ее сматывания. Это не в полной мере позволяет получать постоянство требуемого качества упаковывания, особенно на произвольно изменяющихся параметрах упаковываемых объектов (т.е. когда упаковываются разнородные объекты). В другом варианте реализации затормаживания пленки, можно достигать торможением непосредственно пленки, при этом требуется, например, несколько вращающихся валков или системы роликов, через которые пропускается пленка, валки или ролики тормозятся с постоянным моментом, и тем самым достигается постоянное натяжение. Однако такие системы являются не оптимальными для держателей бобин, перемещаемых вручную, т.к. они имеют сложную конструкцию, повышенную массу, сложностью обслуживания и т.д.
В настоящее время известны подвижные и неподвижные держатели для бобины с упаковочным материалом.
Примером неподвижного держателя является устройство для упаковки с возможностью измерения веса [RU 2761685, опубл. 13.12.2021 г.], которое включает основание, на котором установлены опорный узел, включающий вращающийся опорный элемент, предназначенный для размещения на нем упаковываемого предмета, и держатель упаковочного материала. В разных вариантах держатель упаковочного материала так же может быть организован без связи с общим основанием, например, закреплен на стене.
Известно орбитальное устройство для упаковки [RU 2779320, опубл. 06.09.2022 г.], которое включает центральный держатель и редуктор, выполненные с возможностью соединения с опорой, причем центральный держатель проходит через полый выходной вал редуктора, который связан с по меньшей мере одним рычагом для размещения на нем бобины с упаковочным материалом, на держателе установлена по меньшей мере одна направляющая, выполненная с возможностью удержания упаковываемого предмета. Рычаг имеет длину плеча, позволяющую производить орбитальную обмотку зафиксированного предмета, не цепляя его. Рычаг снабжен средством (стержень, шток) установки с возможностью вращения бобины с упаковочным материалом, например, стрейч-пленкой, бумагой и любым другим материалом для упаковки.
В данном случае рычаг для размещения на нем бобины с упаковочным материалом представляет собой подвижный держатель для бобины с упаковочным материалом.
Недостатками известных держателей для упаковочного материала является ограниченная функциональность, поскольку они позволяют наматывать упаковочный материал на предмет только на высоту равную ширине пленки. Кроме этого, данные решения не позволяют управлять натяжением пленки, допуская из-за этого некачественное упаковывание.
Технический результат заявляемого изобретения заключается в повышении качества упаковывания за счет повышения функциональности.
Указанный технический результат в части способа достигается за счет того, что способ изменения степени натяжения упаковочного материала включает следующие этапы: несущий каркас устанавливают с возможностью линейного перемещения на направляющей держателя для бобины с упаковочным материалом, при этом несущий каркас предварительно снабжают удерживающим элементом, выполненным с возможностью расположения на нем бобины с упаковочным материалом, по меньшей мере одним захватом и по меньшей мере одним средством ручного управления натяжением упаковочного материала, в процессе разматывания упаковочного материала, удерживая рукой несущий каркас за захват, этой же рукой приводят в движение средство ручного управления натяжением упаковочного материала таким образом, что осуществляют фрикционное изменение степени натяжения упаковочного материала.
Указанный технический результат в части устройства достигается за счет того, что держатель для бобины с упаковочным материалом содержит направляющую, на которой с возможностью линейного перемещения установлен несущий каркас, снабженный удерживающим элементом, выполненным с возможностью расположения на нем бобины с упаковочным материалом, при этом на несущем каркасе имеются по меньшей мере один захват и по меньшей мере одно средство ручного управления натяжением упаковочного материала, выполненное с возможностью фрикционного изменения степени натяжения упаковочного материала в процессе его разматывания.
Возможны варианты развития основного технического решения, заключающиеся в следующем.
Захват предназначен для контакта с рукой и выполнен в виде подвижной или неподвижной ручки.
Захват предназначен для контакта с рукой и выполнен за одно целое с несущим каркасом.
В качестве средства управления натяжением упаковочного материала применено средство контакта с упаковочным материалом, выполненное с возможностью фрикционного воздействия на степень натяжения полотна упаковочного материала.
В этом случае:
- в качестве средства контакта с упаковочным материалом применен зацеп, выполненный с возможностью фрикционного изменения степени натяжения упаковочного материала при контакте с ним;
- зацеп приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей;
- зацеп приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей;
- зацеп приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей;
- зацеп приводится в движение за счет движения толкателя, установленного на каретке.
В качестве средства контакта с упаковочным материалом применен прижим снаружи к бобине.
В этом случае:
- прижим снаружи к бобине приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей;
- прижим снаружи к бобине приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей;
- прижим снаружи к бобине приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей;
- прижим снаружи к бобине приводится в движение за счет движения толкателя, установленного на каретке.
В качестве средства управления натяжением упаковочного материала применено средство торможения бобины при сматывании упаковочного материала.
В качестве средства торможения бобины применен втулочный торцевой зажимной узел, включающий наклонную поверхность, которая выполнена с возможностью при своем движении зажимать торец втулки бобины, и установленный на несущем каркасе с по меньшей мере одного торца удерживающего элемента и выполненный с возможностью зажимания втулки бобины с ее торцевой поверхности.
В этом случае:
- втулочный торцевой зажимной узел приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей;
- втулочный торцевой зажимной узел приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей;
- втулочный торцевой зажимной узел приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей;
- втулочный торцевой зажимной узел приводится в движение за счет движения толкателя, установленного на каретке.
В качестве средства торможения бобины применен втулочный разжимной узел, установленный на несущем каркасе с по меньшей мере одного торца удерживающего элемента и выполненный с возможностью прижимания ко втулке бобины со стороны ее внутренней поверхности.
В этом случае:
- втулочный разжимной узел приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей;
- втулочный разжимной узел приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей;
- втулочный разжимной узел приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей;
- втулочный разжимной узел приводится в движение за счет движения толкателя, установленного на каретке;
В качестве средства торможения бобины применен втулочный боковой зажимной узел, установленный на несущем каркасе и выполненный с возможностью зажимания бобины с ее внешней поверхности.
В этом случае:
- втулочный боковой зажимной узел приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей;
- втулочный боковой зажимной узел приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей;
- втулочный боковой зажимной узел приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей;
- втулочный боковой зажимной узел приводится в движение за счет толкателя, установленного на каретке.
Таким образом, за счет совокупности существенных признаков удалось повысить качество упаковывания за счет добавления функции изменения натяжения упаковочного материала. Так, благодаря торможению упаковочного материала именно в процессе упаковывания предметов, т.е. его разматывания (сматывания), удается изменять степень натяжения плёнки непосредственно при упаковывании. Одновременно с этим управление степенью натяжения упаковочного материала осуществляется без прерывания процесса упаковывания и той же рукой, которая при этом контролирует положение несущей каретки на направляющей - что обеспечивает оперативное и простое управление для оператора основными параметрами при упаковывании - вертикальной подачей бобины с упаковочным материалом и управление натяжением пленки. Изменяемое усилие, при чем непосредственно оператором (не автоматически, а управляемо оператором), позволит интерактивно управлять ключевым параметром обмотки - натяжением, что в свою очередь повысит качество упаковывания объектов.
Сущность заявляемого изобретения поясняется фигурами и нижеследующим описанием.
На Фиг. 1 представлен общий вид устройства для упаковки.
На Фиг. 2, а и б представлен держатель для бобины с упаковочным материалом, в котором зацеп приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разные положения угла поворота захвата.
На Фиг. 3, а и б представлен держатель для бобины с упаковочным материалом, в котором зацеп приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разные положения угла поворота захвата.
На Фиг. 4, а и б представлен держатель для бобины с упаковочным материалом, в котором зацеп приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разную величину линейного перемещения захвата.
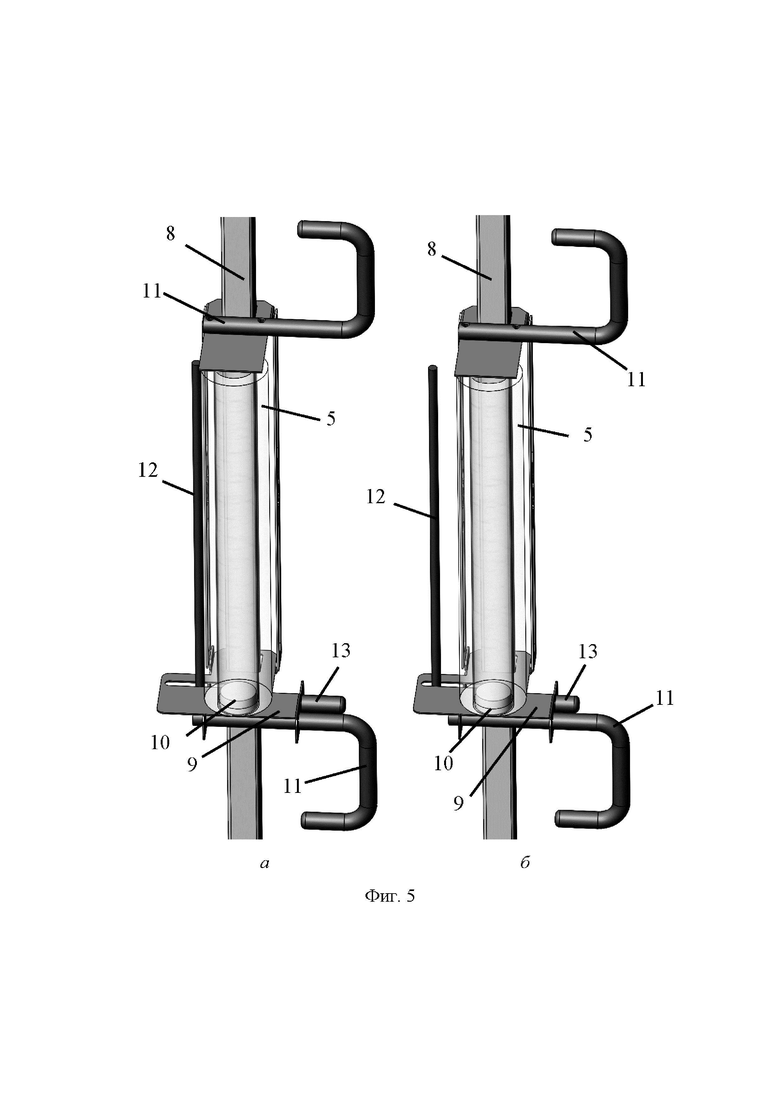
На Фиг. 5, а и б представлен держатель для бобины с упаковочным материалом, в котором зацеп приводится в движение за счет движения толкателя, установленного на несущем каркасе. Изображения а и б иллюстрируют разную величину линейного перемещения толкателя.
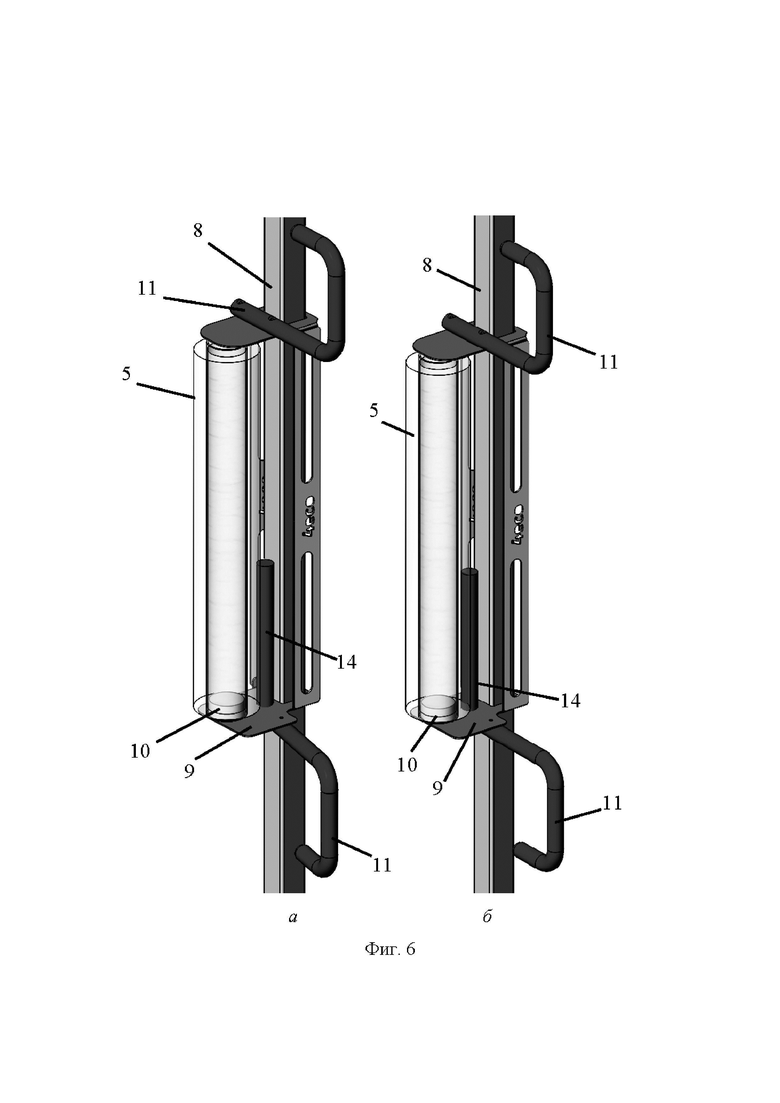
На Фиг. 6, а и б представлен держатель для бобины с упаковочным материалом, в котором прижим снаружи к бобине приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разные положения угла поворота захвата.
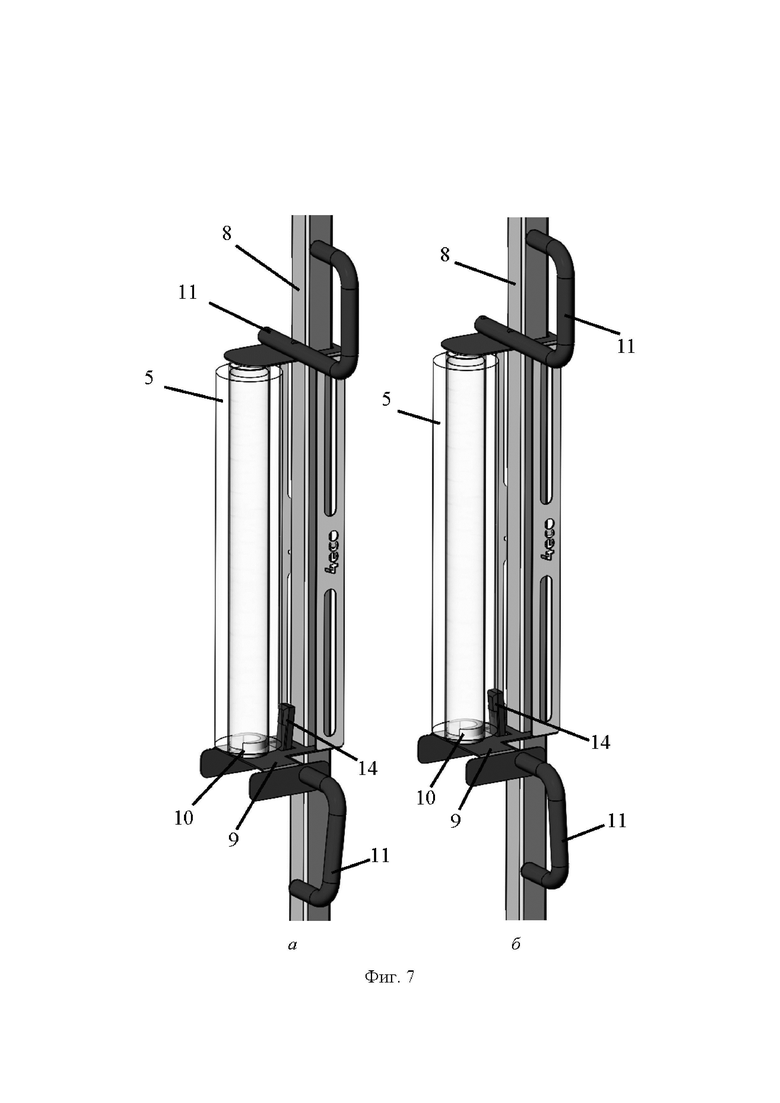
На Фиг. 7, а и б представлен держатель для бобины с упаковочным материалом, в котором прижим снаружи к бобине приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разные положения угла поворота захвата.
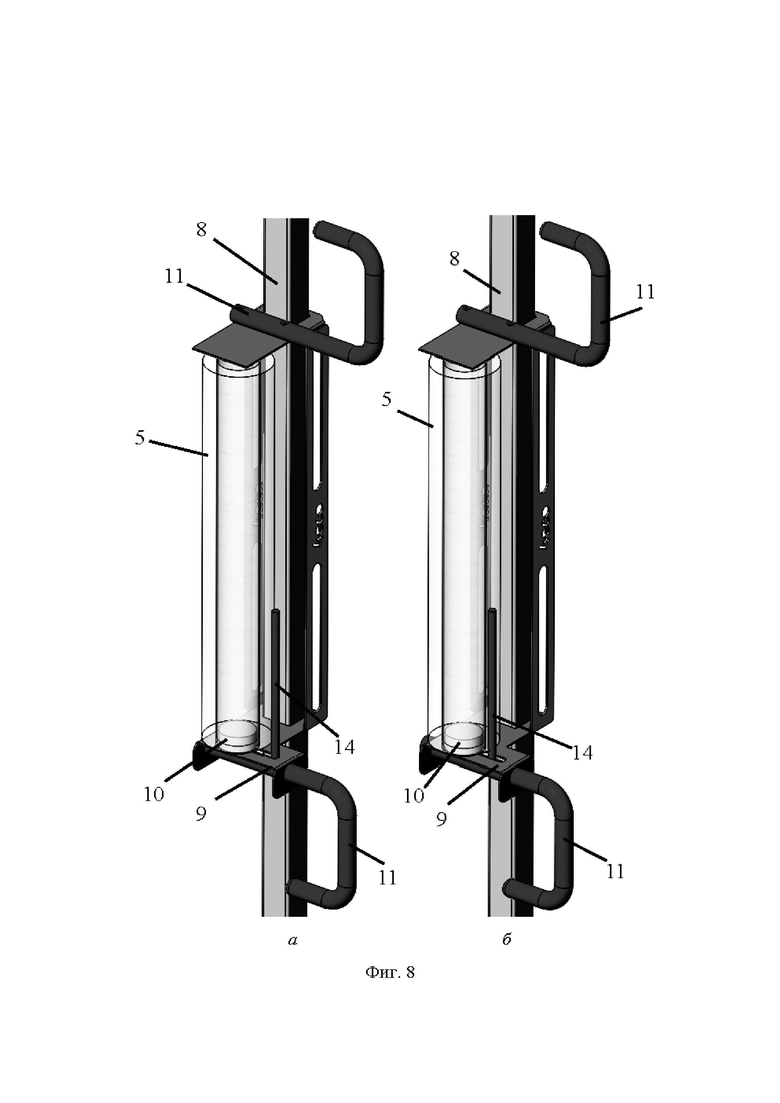
На Фиг. 8, а и б представлен держатель для бобины с упаковочным материалом, в котором прижим снаружи к бобине приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разную величину линейного перемещения захвата.
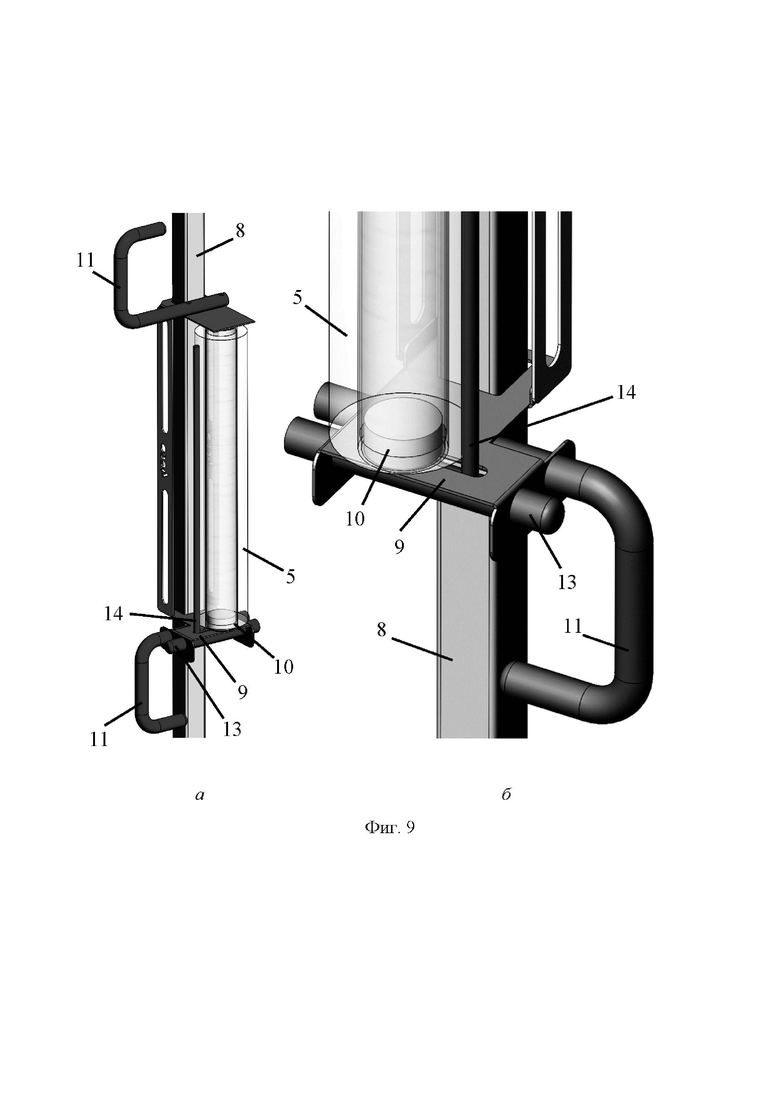
На Фиг. 9, а, б, в представлен держатель для бобины с упаковочным материалом, в котором прижим снаружи к бобине приводится в движение за счет движения толкателя, установленного на несущем каркасе. Изображение а иллюстрирует общий вид держателя, изображения б и в в укрупненном виде иллюстрируют разную величину линейного перемещения толкателя.
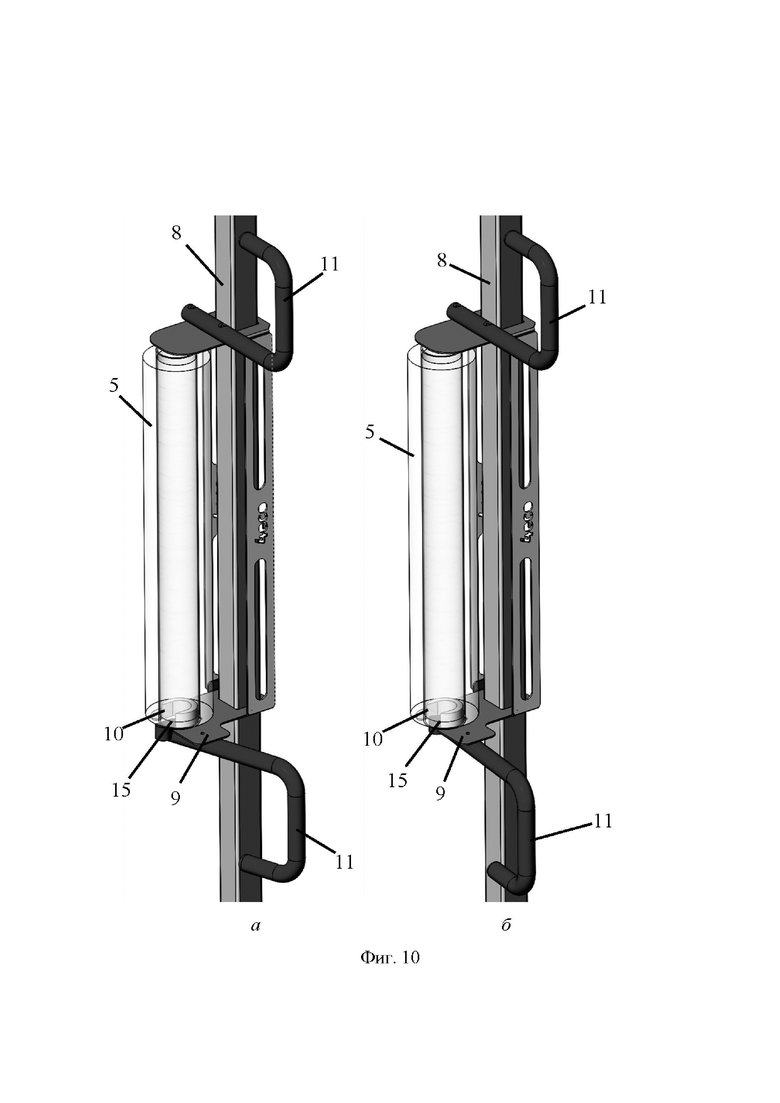
На Фиг. 10, а и б представлен держатель для бобины с упаковочным материалом, в котором втулочный торцевой зажимной узел приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разные положения угла поворота захвата.
На Фиг. 11, а и б представлен держатель для бобины с упаковочным материалом, в котором втулочный торцевой зажимной узел приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разные положения угла поворота захвата.
На Фиг. 12, а и б представлен держатель для бобины с упаковочным материалом, в котором втулочный торцевой зажимной узел приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разную величину линейного перемещения захвата.
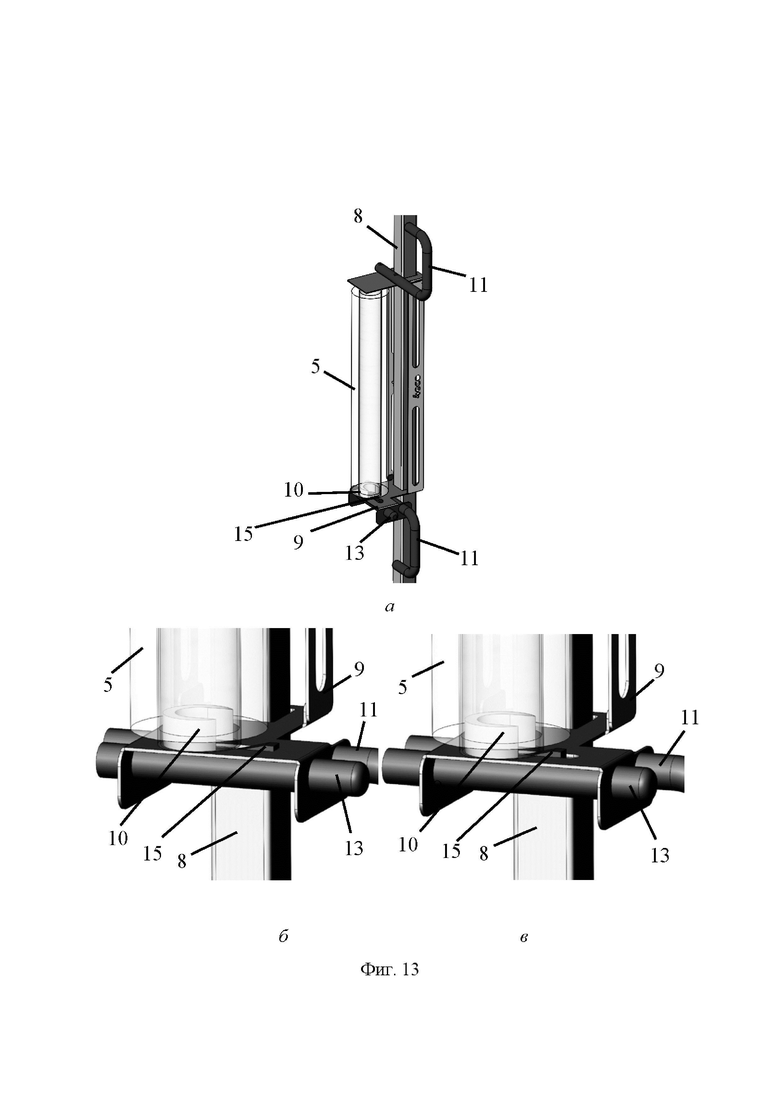
На Фиг. 13, а, б, в представлен держатель для бобины с упаковочным материалом, в котором втулочный торцевой зажимной узел приводится в движение за счет движения толкателя, установленного на несущем каркасе. Изображение а иллюстрирует общий вид держателя, изображения б и в в укрупненном виде иллюстрируют разную величину линейного перемещения толкателя.
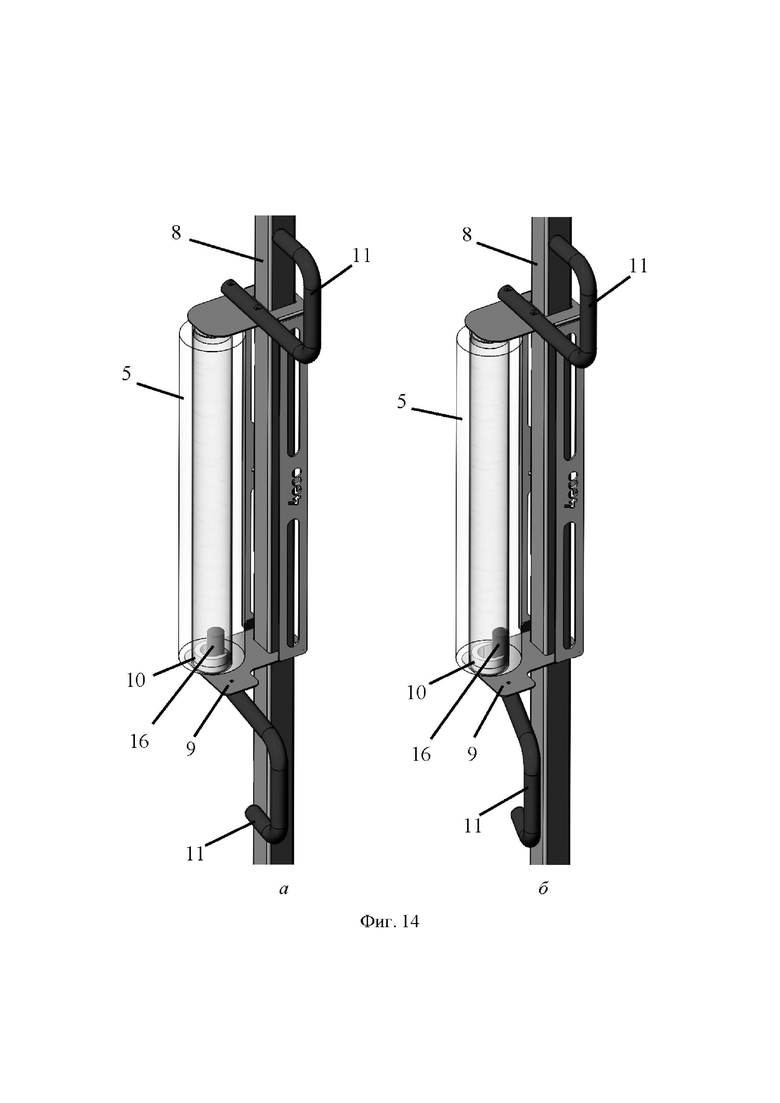
На Фиг. 14, а и б представлен держатель для бобины с упаковочным материалом, в котором втулочный разжимной узел приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разные положения угла поворота захвата.
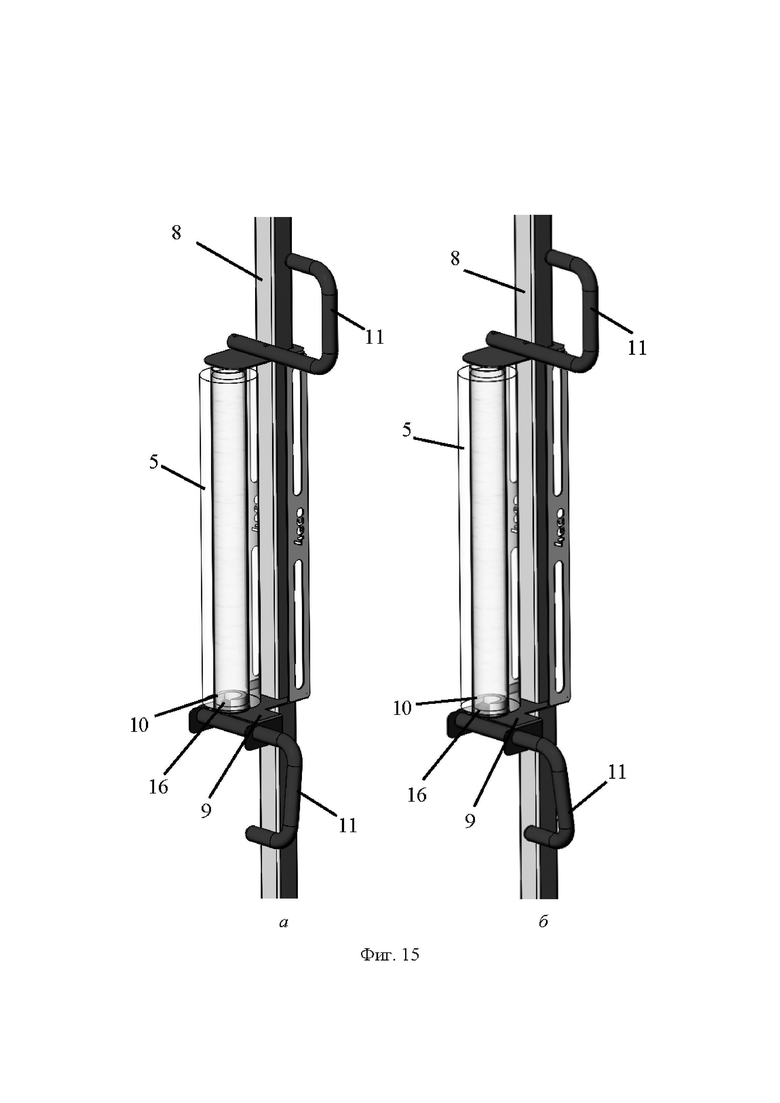
На Фиг. 15, а и б представлен держатель для бобины с упаковочным материалом, в котором втулочный разжимной узел приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разные положения угла поворота захвата.
На Фиг. 16, а и б представлен держатель для бобины с упаковочным материалом, в котором втулочный разжимной узел приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разную величину линейного перемещения захвата.
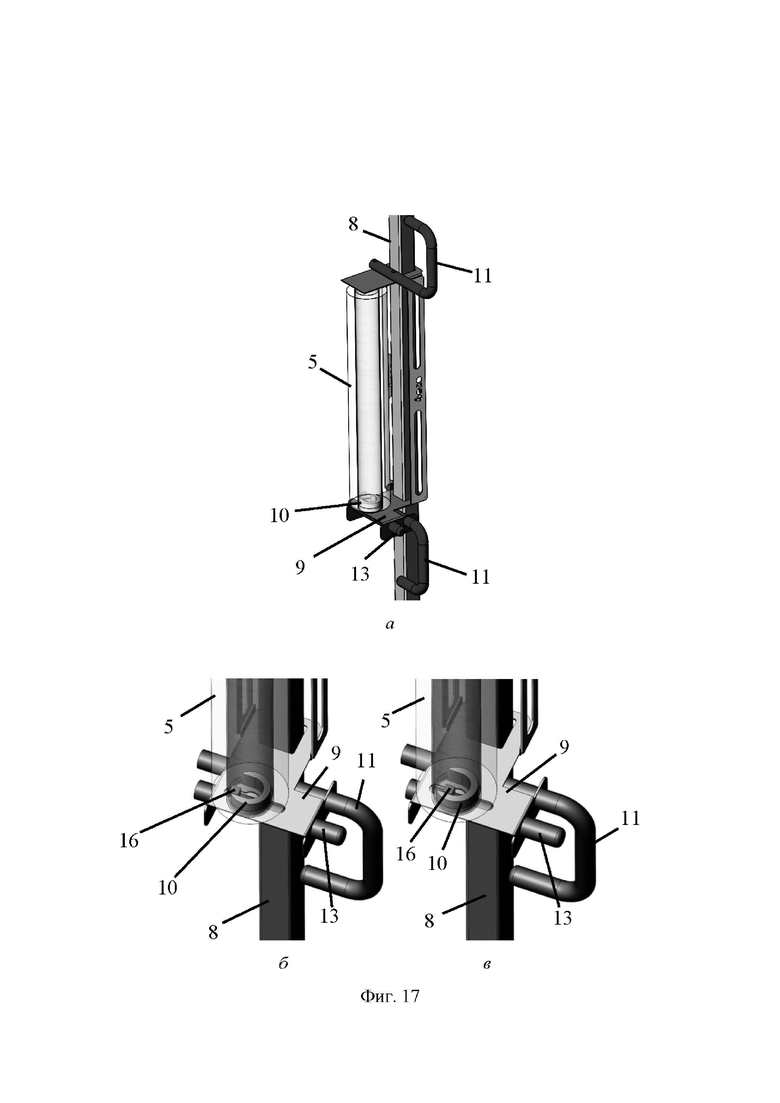
На Фиг. 17, а, б, в представлен держатель для бобины с упаковочным материалом, в котором втулочный разжимной узел приводится в движение за счет движения толкателя, установленного на несущем каркасе. Изображение а иллюстрирует общий вид держателя, изображения б и в в укрупненном виде иллюстрируют разную величину линейного перемещения толкателя.
На Фиг. 18, а и б представлен держатель для бобины с упаковочным материалом, в котором втулочный боковой зажимной узел приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разные положения угла поворота захвата.
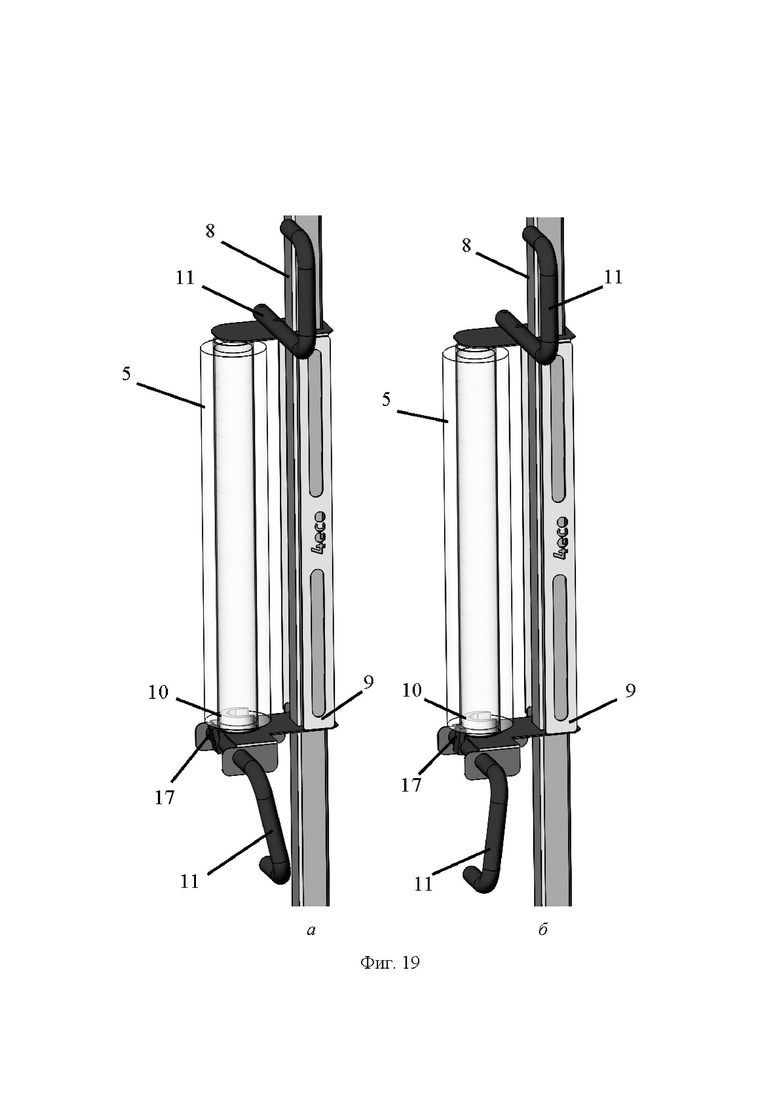
На Фиг. 19, а и б представлен держатель для бобины с упаковочным материалом, в котором втулочный боковой зажимной узел приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разные положения угла поворота захвата.
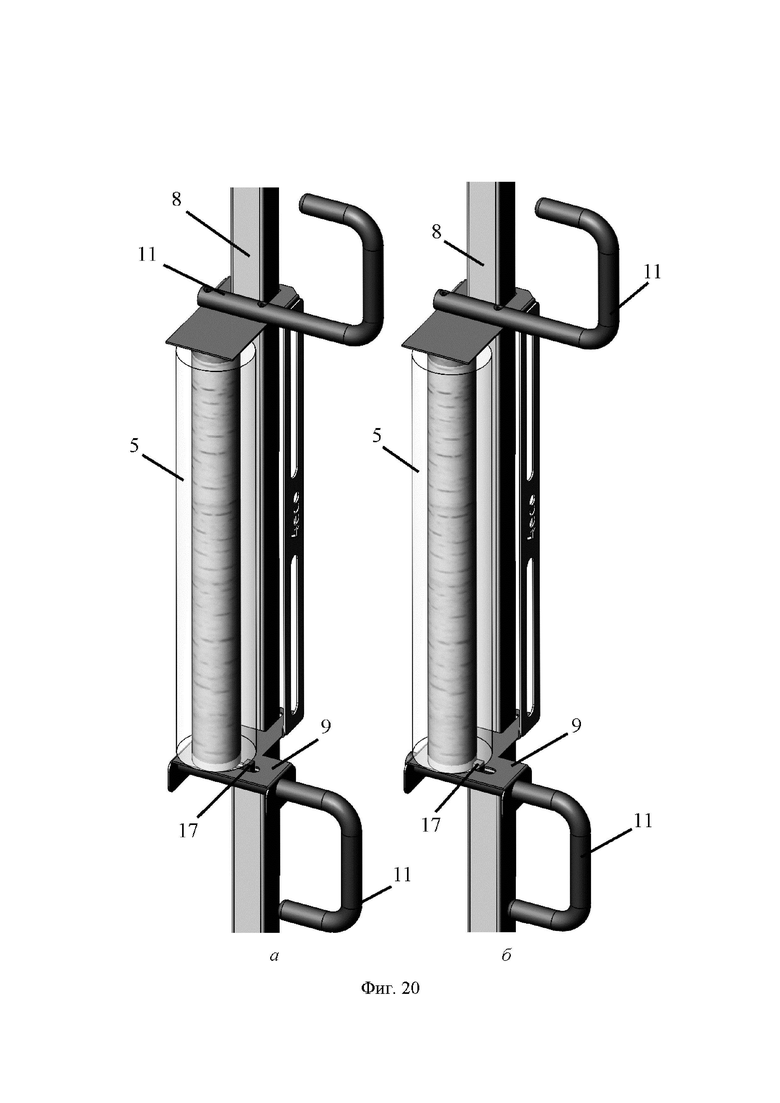
На Фиг. 20, а и б представлен держатель для бобины с упаковочным материалом, в котором втулочный боковой зажимной узел приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей. Изображения а и б иллюстрируют разную величину линейного перемещения захвата.
На Фиг. 21, а, б, в представлен держатель для бобины с упаковочным материалом, в котором втулочный боковой зажимной узел приводится в движение за счет движения толкателя, установленного на несущем каркасе. Изображение а иллюстрирует общий вид держателя, изображения б и в в укрупненном виде иллюстрируют разную величину линейного перемещения толкателя.
Устройство для упаковки (Фиг. 1) включает основание 1, на котором установлены опорный узел, включающий вращающийся опорный элемент 2, предназначенный для размещения на нем упаковываемого предмета 3, и держатель 4 для бобины с упаковочным материалом 5. Бобина с упаковочным материалом 5 образована путем наматывания на втулку (выполненную, например, из картона, полимера и др.) упаковочного материала 5.
3
8
Основание 1 представляет собой опорную раму и может быть снабжено средствами его перемещения, например, колесами 6, направляющими и др.
В качестве опорного элемента 2 может быть применена опора различной формы, предназначенная для размещения на ней упаковываемого предмета с фиксацией или без, например, платформа (круглой, прямоугольной или любой другой формы), пневматический зажим, штырь или любой другой элемент, на котором можно разместить и удержать предмет 3 во время его упаковывания. Опорный элемент 2 вращается вручную (на фигурах не показано) или с помощью электродвигателя 7.
В разных вариантах держатель 4 для бобины с упаковочным материалом 5 может быть организован без связи с общим основанием 1, например, закреплен на стене или установлен самостоятельно.
Держатель 4 для бобины с упаковочным материалом содержит направляющую 8, на которой с возможностью линейного перемещения установлен несущий каркас 9. Направляющая 8 может быть расположена горизонтально или вертикально и представляет собой, например, опорную стойку, выполненную с возможностью обеспечения линейного перемещения относительно нее несущего каркаса 9. Несущий каркас 9 может быть установлен горизонтально или вертикально.
Несущий каркас 9 снабжен удерживающим элементом 10, выполненным с возможностью расположения на нем бобины с упаковочным материалом 5.
Несущий каркас 9 может представлять собой каретку, снабженную подшипниками, или раму, удерживающуюся на заданном высотном уровне на направляющей 8 за счет перекоса или силы трения, но при управлении оператором свободно перемещающуюся в вертикальном направлении.
На несущем каркасе 9 имеются по меньшей мере один захват 11 и по меньшей мере одно средство ручного управления натяжением упаковочного материала, выполненное с возможностью фрикционного изменения степени натяжения упаковочного материала 5 в процессе его разматывания.
Захват 11 предназначен для контакта с рукой и может быть выполнен в виде подвижной или неподвижной ручки (Фиг. 1-21). В другом варианте исполнения захват 11 может быть выполнен за одно целое с несущим каркасом 9, т.е. несущий каркас 9 может иметь рамную конструкцию, часть которой позволяет ухватиться за нее рукой (на фигурах не показано).
В качестве средства управления натяжением упаковочного материала в первом из вариантов может быть применено средство контакта с упаковочным материалом, выполненное с возможностью фрикционного воздействия на степень натяжения полотна упаковочного материала.
Во втором варианте в качестве средства управления натяжением упаковочного материала может быть применено средство торможения бобины при сматывании упаковочного материала.
В случае осуществления первого варианта возможны следующие реализации конструкции.
В качестве средства контакта с упаковочным материалом может быть применен зацеп 12, выполненный с возможностью фрикционного изменения степени натяжения упаковочного материала 5 при контакте с ним (Фиг. 2-5).
Зацеп 12 представляет собой продольный элемент (балка, труба), закрепленный на одном из захватов 11 (в данном исполнении на нижнем) вдоль удерживающего элемента 10 или на толкателе 13 на заданном расстоянии, достаточном для размещения и вращения бобины с упаковочным материалом 5, таким образом, чтобы при разматывании упаковочный материал 5 цеплялся за него, изменяя степень своего натяжения. Т.е. упаковочный материал 5 огибает зацеп 12 и при изменении положении зацепа 12 меняется угол охвата его упаковочным материалом 5, что в свою очередь приводит к изменению натяжения за счет изменения силы трения.
Зацеп 12 может приводиться в движение за счет вращения нижнего захвата 11 вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей 8 (Фиг. 2, а и б). Положение а на Фиг. 2 отличается от положения б углом поворота нижнего захвата 11. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Зацеп 12 может приводиться в движение за счет вращения нижнего захвата 11 вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей 8 (Фиг. 3, а и б). Положение а на Фиг. 3 отличается от положения б углом поворота нижнего захвата 11. В данном варианте конструкции несущий каркас 9 в своей нижней части содержит пластину 9.1, на которой установлен зацеп 12. Пластина 9.1 может вращаться вокруг удерживающего элемента 10. В пластине 9.1 образован вырез 9.2, в который проходит выступ 11.1, являющийся частью захвата 11. При вращении нижнего захвата 11 вокруг своей оси, выступ 11.1 через вырез 9.2 на пластине 9.1 меняет угловое положение пластины 9.1, и, в свою очередь, изменяется положение зацепа 12, через который проходит траектория движение полотна упаковочного материала 5. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Зацеп 12 может приводиться в движение за счет перемещения нижнего захвата 11 вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей 8. (Фиг. 4, а и б). Положение а на Фиг. 4 отличается от положения б величиной линейного перемещения нижнего захвата 11. Зацеп 12 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Зацеп 12 может приводиться в движение за счет движения толкателя 13, установленного на несущем каркасе 9 (Фиг. 5, а и б), в непосредственной близости от нижнего захвата 11 для того, чтобы одной рукой можно было и управлять толкателем 13, и удерживать несущий каркас 9 за нижний захват 11. Положение а на Фиг. 5 отличается от положения б величиной линейного перемещения толкателя 13. Зацеп 12 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
В исходном положении толкателя 13 зацеп 12 располагается на заданном расстоянии от внешней поверхности бобины с упаковочным материалом 5. При работе оператор нажимает большим пальцем руки, которой он удерживает несущий каркас 9, на толкатель 13, который, в свою очередь, передает линейное перемещение на зацеп 12, приводя его в рабочее положение. При этом при разматывании упаковочного материала 5 возникает трение между поверхностью упаковочного материала 5 и поверхностью зацепа 12, обеспечивая тем самым натяжение полотна упаковочного материала 5, при его разматывании, пропорционально положению толкателя 13.
При этом толкатель 13 может быть снабжен возвратной пружиной (на фигурах не показано), выполненной с возможностью возврата толкателя 13 в исходное положение.
В качестве средства контакта с упаковочным материалом может быть применен прижим 14 снаружи к бобине (Фиг. 6-9), который отличается от варианта с зацепом 12 тем, что контактирует с упаковочным материалом 5 еще пока он находится на бобине.
Прижим 14 снаружи к бобине может приводиться в движение за счет вращения нижнего захвата 11 вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей 8 (Фиг. 6, а и б). Положение а на Фиг. 6 отличается от положения б углом поворота нижнего захвата 11. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Прижим 14 снаружи к бобине может приводиться в движение за счет вращения нижнего захвата 11 вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей 8. (Фиг. 7, а и б). Положение а на Фиг. 7 отличается от положения б углом поворота нижнего захвата 11. Прижим 14 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Прижим 14 снаружи к бобине может приводиться в движение за счет перемещения нижнего захвата 11 вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей 8 (Фиг. 8, а и б). Положение а на Фиг. 8 отличается от положения б величиной линейного перемещения нижнего захвата 11. Прижим 14 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Прижим 14 снаружи к бобине может приводиться в движение за счет движения толкателя 13, установленного на несущем каркасе 9 (Фиг. 9, а и б) в непосредственной близости от нижнего захвата 11 для того, чтобы одной рукой можно было и управлять толкателем 13, и удерживать несущий каркас 9 за нижний захват 11. Прижим 14 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
В рабочем положении толкателя 13 прижим 14 соприкасается с внешней поверхностью бобины с упаковочным материалом 5. При работе оператор нажимает большим пальцем правой руки на толкатель 13, который, в свою очередь, передает усилие прижатия на прижим 14. При этом возникает трение между прижимом 14 и внешней поверхностью бобины с упаковочным материалом 5, что, в свою очередь, обеспечивает натяжение полотна упаковочного материала 5 пропорционально усилию нажатия на толкатель 13.
При этом толкатель 13 свое положение относительно несущего каркаса 9 может не изменять, так он передает усилие. Т.е. при первичном нажатии толкатель 13 перемещается до упора, а при последующих нажатиях положение толкателя 13 относительно несущего каркаса 9 может не изменяться, так как он передает только усилие.
Толкатель 13 может быть снабжен возвратной пружиной (на фигурах не показано), выполненной с возможностью возврата толкателя 13 в исходное положение.
В случае осуществления второго варианта возможны следующие реализации конструкции.
В качестве средства торможения бобины может быть применен втулочный торцевой зажимной узел 15, включающий наклонную поверхность, которая выполнена с возможностью при своем движении зажимать торец втулки бобины, и установленный на несущем каркасе 9 с по меньшей мере одного торца удерживающего элемента 10 и выполненный с возможностью зажимания втулки бобины с ее торцевой поверхности. (Фиг. 10-13).
Втулочный торцевой зажимной узел 15 может приводиться в движение за счет вращения нижнего захвата 11 вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей 8 (Фиг. 10, а и б). Положение а на Фиг. 10 отличается от положения б углом поворота нижнего захвата 11. Зажимной узел 15 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Втулочный торцевой зажимной узел 15 может приводиться в движение за счет вращения нижнего захвата 11 вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей 8 (Фиг. 11, а и б). Положение а на Фиг. 11 отличается от положения б углом поворота нижнего захвата 11. Зажимной узел 15 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Втулочный торцевой зажимной узел 15 может приводиться в движение за счет перемещения нижнего захвата 11 вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей 8 (Фиг. 12, а и б). Положение а на Фиг. 12 отличается от положения б величиной линейного перемещения нижнего захвата 11. Зажимной узел 15 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Втулочный торцевой зажимной узел 15 может приводиться в движение за счет движения толкателя 13, установленного на несущем каркасе 9 (Фиг. 13, а, б, в) в непосредственной близости от нижнего захвата 11 для того, чтобы одной рукой можно было и управлять толкателем 13, и удерживать несущий каркас 9 за нижний захват 11. Положение б на Фиг. 9 отличается от положения в величиной линейного перемещения толкателя 13. Зажимной узел 15 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
В рабочем положении толкателя 13 зажимной узел 15 соприкасается с нижней торцевой поверхностью втулки бобины с упаковочным материалом 5. При работе оператор нажимает большим пальцем правой руки на толкатель 13, который, в свою очередь, передает усилие сжатия на зажимной узел 15. При этом возникает трение между зажимным узлом 15 и торцевой поверхностью втулки бобины с упаковочным материалом 5, что, в свою очередь, обеспечивает натяжение полотна упаковочного материала 5 пропорционально усилию нажатия на толкатель 13.
При этом толкатель 13 может быть снабжен возвратной пружиной (на фигурах не показано), выполненной с возможностью возврата толкателя 13 в исходное положение.
В качестве средства торможения бобины может быть применен втулочный разжимной узел 16, выполненный в виде выступа, установленный на несущем каркасе 9 с по меньшей мере одного торца удерживающего элемента 10 и выполненный с возможностью прижимания ко втулке бобины со стороны ее внутренней поверхности (Фиг. 14-17).
Втулочный разжимной узел 16 может приводиться в движение за счет вращения нижнего захвата 11 вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей 8 (Фиг. 14, а и б). Положение а на Фиг. 14 отличается от положения б углом поворота нижнего захвата 11. Разжимной узел 16 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Втулочный разжимной узел 16 может приводиться в движение за счет вращения нижнего захвата 11 вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей 8 (Фиг. 15, а и б). Положение а на Фиг. 15 отличается от положения б углом поворота нижнего захвата 11. Разжимной узел 16 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Втулочный разжимной узел 16 может приводиться в движение за счет перемещения нижнего захвата 11 вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей 8 (Фиг. 16, а и б). Положение а на Фиг. 16 отличается от положения б величиной линейного перемещения нижнего захвата 11. Разжимной узел 16 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Втулочный разжимной узел 16 может приводиться в движение за счет движения толкателя 13, установленного на несущем каркасе 9 (Фиг. 17, а, б, в) в непосредственной близости от нижнего захвата 11 для того, чтобы одной рукой можно было и управлять толкателем 13, и удерживать несущий каркас 9 за нижний захват 11. Положение б на Фиг. 17 отличается от положения в величиной линейного перемещения толкателя 13. Разжимной узел 16 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
В рабочем положении толкателя 13 разжимной узел 16 соприкасается с внутренней поверхностью втулки бобины с упаковочным материалом 5. При работе оператор нажимает большим пальцем правой руки на толкатель 13, который, в свою очередь, передает усилие разжатия на разжимной узел 16. При этом возникает трение между разжимным узлом 16 и внутренней поверхностью втулки бобины с упаковочным материалом 5, что, в свою очередь, обеспечивает натяжение полотна упаковочного материала 5 пропорционально усилию нажатия на толкатель 13.
При этом толкатель 13 может быть снабжен возвратной пружиной (на фигурах не показано), выполненной с возможностью возврата толкателя 13 в исходное положение.
В качестве средства торможения бобины может быть применен втулочный боковой зажимной узел 17, выполненный в виде выступа, установленный на несущем каркасе 9 и выполненный с возможностью зажимания бобины с внешней поверхности ее втулки (Фиг. 18-21).
Втулочный боковой зажимной узел 17 может приводиться в движение за счет вращения нижнего захвата 11 вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей 8 (Фиг. 18, а и б). Положение а на Фиг. 18 отличается от положения б углом поворота нижнего захвата 11. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Втулочный боковой зажимной узел 17 может приводиться в движение за счет вращения нижнего захвата 11 вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей 8 (Фиг. 19, а и б). Положение а на Фиг. 19 отличается от положения б углом поворота нижнего захвата 11. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Втулочный боковой зажимной узел 17 может приводиться в движение за счет перемещения нижнего захвата 11 вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей 8 (Фиг. 20, а и б). Положение а на Фиг. 20 отличается от положения б величиной линейного перемещения нижнего захвата 11. Зажимной узел 17 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
Втулочный боковой зажимной узел 17 может приводиться в движение за счет толкателя 13, установленного на несущем каркасе 9 (Фиг. 21, а, б, в) в непосредственной близости от нижнего захвата 11 для того, чтобы одной рукой можно было и управлять толкателем 13, и удерживать несущий каркас 9 за нижний захват 11. Положение б на Фиг. 21 отличается от положения в величиной линейного перемещения толкателя 13. Зажимной узел 17 может перемещаться, например, в прорези, образованной в основании несущего каркаса 9. Верхний захват 11 в данном случае неподвижно закреплен на несущем каркасе 9.
В рабочем положении толкателя 13 зажимной узел 17 соприкасается с внешней поверхностью втулки бобины с упаковочным материалом 5. При работе оператор нажимает большим пальцем правой руки на толкатель 13, который, в свою очередь, передает усилие прижима к внешней поверхности втулки бобины с упаковочным материалом 5 на зажимной узел 17. При этом возникает трение между зажимным узлом 17 и внешней поверхностью втулки бобины с упаковочным материалом 5, что, в свою очередь, обеспечивает натяжение полотна упаковочного материала 5 пропорционально усилию нажатия на толкатель 13.
При этом толкатель 13 может быть снабжен возвратной пружиной (на фигурах не показано), выполненной с возможностью возврата толкателя 13 в исходное положение.
Заявляемое устройство реализует следующий способ изменения натяжения упаковочного материала.
На опорном элементе 2 размещают предмет 3, который необходимо упаковать и зацепляют за него или накидывают на него край упаковочного материала 5. Включают электродвигатель 7, который приводит в движение опорный элемент 2.
Несущий каркас 9 предварительно снабжают удерживающим элементом 10, выполненным с возможностью расположения на нем бобины с упаковочным материалом 5, по меньшей мере одним захватом 11 и по меньшей мере одним средством ручного управления натяжением упаковочного материала.
Бобину с упаковочным материалом 5 размещают на удерживающем элементе 10 несущего каркаса 9, который предварительно устанавливают на направляющей 8 с возможностью линейного перемещения.
Несущий каркас 9 перемещают вдоль направляющей 8 на необходимую позицию.
В процессе разматывания упаковочного материала 5, удерживая рукой несущий каркас 9 за захват 11, этой же рукой приводят в движение средство ручного управления натяжением упаковочного материала таким образом, что осуществляют фрикционное изменение степени натяжения упаковочного материала 5.
Средство ручного управления натяжением упаковочного материала за счет своей подвижности обеспечивает заданный угол отклонения упаковочного материала 5 относительно бобины, приводя тем самым к контролируемому изменению степени натяжения полотна упаковочного материала 5.
Заданный угол определяется оператором за счет непосредственного управления процессом упаковывания, при этом требуемая степень натяжения определяется: визуально, т.к. натяжение и ослабление контролируется по видоизменению свободной части полотна упаковочного материала 5; на слух, так как для каждого характерного уровня натяжения соответствует определенный вибрационно-звуковой режим в системе объект-пленка-каркас; по возникающему усилию, при движении средства ручного управления натяжением, т.к. оно сопротивляется перемещению пропорционально силе натяжения упаковочного материала.
По сути, необходимый угол поворота средства ручного управления натяжением упаковочного материала определяется непосредственно оператором при работе с учетом существующих (в текущий момент) параметров упаковывания предмета 3, а именно возникающего обратного усилия на этом средстве, видоизменения полотна упаковочного материала 5 (при его натяжении) на предмете 3 и на свободном пролете, звуковибрационного режима, возникающего в системе предмет-упаковочный материал-каркас. Указанные параметры изменяются при изменении усилия натяжения упаковочного материала 5, например, при возникающем избыточном натяжении полотна упаковочного материала 5, который при наматывании на предмет 3 более плотно его облегает и за счет своего растяжения утоняется - что контролируется визуально, также свободный пролет материала 5 видоизменяется - например возникает волнистость поверхности материала 5, усиливается блеск и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| Держатель для бобины с упаковочным материалом и способ его применения | 2022 |
|
RU2797599C1 |
| Орбитальное устройство для упаковки | 2022 |
|
RU2779320C1 |
| Опорный узел с возможностью измерения веса, применяемый в устройстве для упаковки | 2021 |
|
RU2761685C1 |
| УСТРОЙСТВО ДЛЯ СКАЛЫВАНИЯ ЛЬДА | 2015 |
|
RU2609879C1 |
| УПАКОВОЧНЫЙ АВТОМАТ | 1998 |
|
RU2191722C2 |
| УЗЕЛ КРЕПЛЕНИЯ ЭЛЕМЕНТОВ СТЕЛЛАЖНОЙ КОНСТРУКЦИИ | 2016 |
|
RU2639618C1 |
| Устройство для упаковывания в пленку штучных предметов с острой кромкой | 1986 |
|
SU1375508A1 |
| ФАСОВОЧНО-УПАКОВОЧНЫЙ ВЕРТИКАЛЬНЫЙ АППАРАТ | 1996 |
|
RU2096281C1 |
| УДАРНЫЙ МЕХАНИЗМ | 2015 |
|
RU2610320C1 |
| УНИВЕРСАЛЬНАЯ УПАКОВОЧНАЯ МАШИНА | 2011 |
|
RU2471690C1 |









Изобретение относится к упаковочному оборудованию. Способ изменения степени натяжения упаковочного материала включает следующие этапы. Несущий каркас устанавливают с возможностью линейного перемещения на направляющей держателя для бобины с упаковочным материалом. При этом несущий каркас предварительно снабжают удерживающим элементом, по меньшей мере одним захватом и по меньшей мере одним средством ручного управления натяжением упаковочного материала. Элемент выполнен с возможностью расположения на нем бобины с упаковочным материалом. В качестве ручного управления натяжением материала применяют средство контакта с упаковочным материалом или средство торможения бобины при сматывании упаковочного материала. В процессе разматывания упаковочного материала удерживают рукой несущий каркас за захват. Этой же рукой приводят в движение средство ручного управления натяжением упаковочного материала таким образом, что осуществляют фрикционное изменение степени натяжения упаковочного материала, в процессе которого происходит передача обратного усилия на руку. В качестве средства контакта с упаковочным материалом применяют зацеп или прижим снаружи к бобине. Достигается повышение качества упаковывания за счет повышения функциональности. 2 н. и 25 з.п. ф-лы, 21 ил.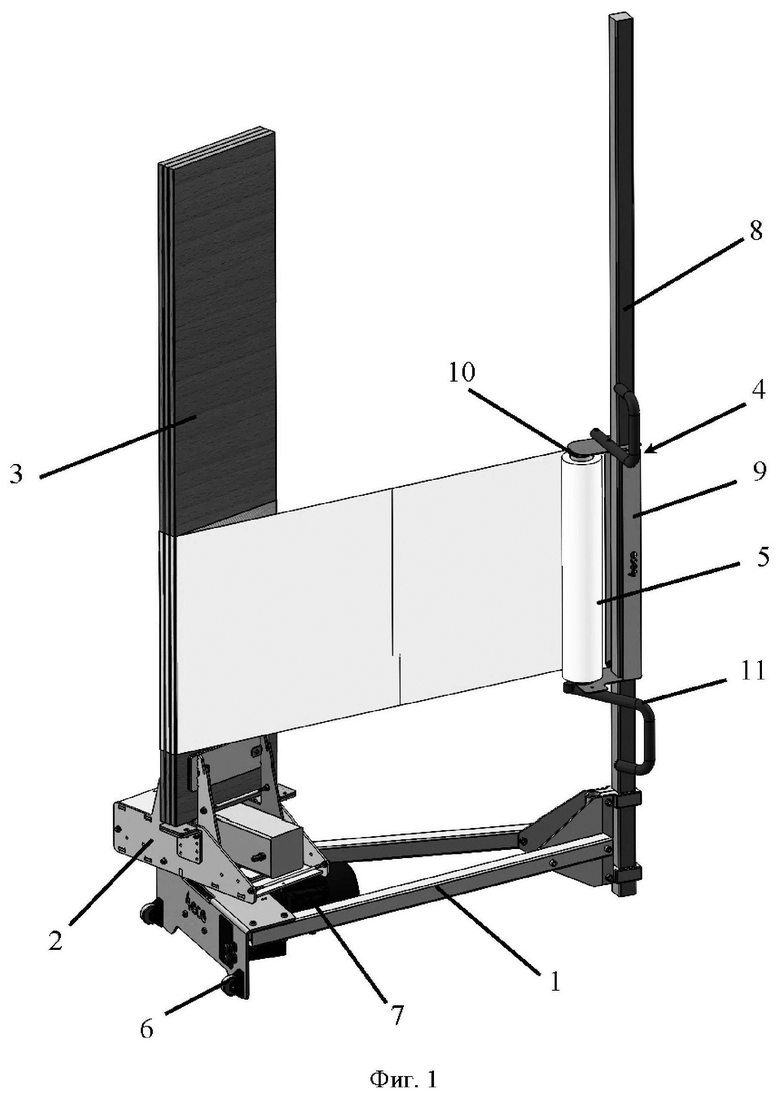
1. Способ изменения степени натяжения упаковочного материала, включающий следующие этапы:
несущий каркас устанавливают с возможностью линейного перемещения на направляющей держателя для бобины с упаковочным материалом,
при этом несущий каркас предварительно снабжают удерживающим элементом, выполненным с возможностью расположения на нем бобины с упаковочным материалом, по меньшей мере одним захватом и по меньшей мере одним средством ручного управления натяжением упаковочного материала, в качестве которого применяют средство контакта с упаковочным материалом или средство торможения бобины при сматывании упаковочного материала,
в процессе разматывания упаковочного материала, удерживая рукой несущий каркас за захват, этой же рукой приводят в движение средство ручного управления натяжением упаковочного материала таким образом, что осуществляют фрикционное изменение степени натяжения упаковочного материала, при этом в качестве средства контакта с упаковочным материалом применяют зацеп или прижим снаружи к бобине.
2. Держатель для бобины с упаковочным материалом, реализующий способ по п. 1, содержащий направляющую, на которой с возможностью линейного перемещения установлен несущий каркас, снабженный удерживающим элементом, выполненным с возможностью расположения на нем бобины с упаковочным материалом, при этом на несущем каркасе имеются по меньшей мере один захват и по меньшей мере одно средство ручного управления натяжением упаковочного материала, в качестве которого применено средство контакта с упаковочным материалом или средство торможения бобины при сматывании упаковочного материала, выполненные с возможностью фрикционного изменения степени натяжения упаковочного материала в процессе его разматывания, при этом в качестве средства контакта с упаковочным материалом применен зацеп или прижим снаружи к бобине.
3. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что захват предназначен для контакта с рукой и выполнен в виде подвижной или неподвижной ручки.
4. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что захват предназначен для контакта с рукой и выполнен за одно целое с несущим каркасом.
5. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что зацеп приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей.
6. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что зацеп приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей.
7. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что зацеп приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей.
8. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что зацеп приводится в движение за счет движения толкателя, установленного на несущем каркасе.
9. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что прижим снаружи к бобине приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей.
10. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что прижим снаружи к бобине приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей.
11. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что прижим снаружи к бобине приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей.
12. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что прижим снаружи к бобине приводится в движение за счет движения толкателя, установленного на несущем каркасе.
13. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что в качестве средства торможения бобины применен втулочный торцевой зажимной узел, включающий наклонную поверхность, которая выполнена с возможностью при своем движении зажимать торец втулки бобины, и установленный на несущем каркасе с по меньшей мере одного торца удерживающего элемента, и выполненный с возможностью зажимания втулки бобины с ее торцевой поверхности.
14. Держатель для бобины с упаковочным материалом по п. 13, отличающийся тем, что втулочный торцевой зажимной узел приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей.
15. Держатель для бобины с упаковочным материалом по п. 13, отличающийся тем, что втулочный торцевой зажимной узел приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей.
16. Держатель для бобины с упаковочным материалом по п. 13, отличающийся тем, что втулочный торцевой зажимной узел приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей.
17. Держатель для бобины с упаковочным материалом по п. 13, отличающийся тем, что втулочный торцевой зажимной узел приводится в движение за счет движения толкателя, установленного на несущем каркасе.
18. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что в качестве средства торможения бобины применен втулочный разжимной узел, установленный на несущем каркасе с по меньшей мере одного торца удерживающего элемента и выполненный с возможностью прижимания к втулке бобины со стороны ее внутренней поверхности.
19. Держатель для бобины с упаковочным материалом по п. 18, отличающийся тем, что втулочный разжимной узел приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей.
20. Держатель для бобины с упаковочным материалом по п. 18, отличающийся тем, что втулочный разжимной узел приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей.
21. Держатель для бобины с упаковочным материалом по п. 18, отличающийся тем, что втулочный разжимной узел приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей.
22. Держатель для бобины с упаковочным материалом по п. 18, отличающийся тем, что втулочный разжимной узел приводится в движение за счет движения толкателя, установленного на несущем каркасе.
23. Держатель для бобины с упаковочным материалом по п. 2, отличающийся тем, что в качестве средства торможения бобины применен втулочный боковой зажимной узел, установленный на несущем каркасе и выполненный с возможностью зажимания бобины с ее внешней поверхности.
24. Держатель для бобины с упаковочным материалом по п. 23, отличающийся тем, что втулочный боковой зажимной узел приводится в движение за счет вращения захвата вокруг вертикальной оси, расположенной параллельно или под углом относительно оси направляющей.
25. Держатель для бобины с упаковочным материалом по п. 23, отличающийся тем, что втулочный боковой зажимной узел приводится в движение за счет вращения захвата вокруг своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей.
26. Держатель для бобины с упаковочным материалом по п. 23, отличающийся тем, что втулочный боковой зажимной узел приводится в движение за счет перемещения захвата вдоль своей горизонтальной продольной оси, которая расположена перпендикулярно или под углом относительно оси направляющей.
27. Держатель для бобины с упаковочным материалом по п. 23, отличающийся тем, что втулочный боковой зажимной узел приводится в движение за счет толкателя, установленного на несущем каркасе.
| 0 |
|
SU199956A1 | |
| МАШИНА ДЛЯ УПАКОВКИ ШТУЧНЫХ ГРУЗОВ В ПОЛИЭТИЛЕНОВУЮ ПЛЕНКУ | 2005 |
|
RU2283800C1 |
| Рефлактометрический метод определения масличности жиросодержащих продуктов | 1960 |
|
SU139145A1 |
| US 20220024620 A1, 27.01.2022 | |||
| Способ настройки мостовой схемы для допускового контроля резисторов | 1971 |
|
SU463914A1 |
| US 5797240 A, 25.08.1998 | |||
| CN 206050147 U, 29.03.2017. | |||

