Изобретение относится к способу обследования разрушенных объектов инфраструктуры в результате нерасчетных воздействий природного или техногенного характера. Для получения информации о состоянии конструкций объекта используют два беспилотных летательных аппаратов (БПЛА), один из которых оснащен полезной нагрузкой для проведения обследований. При этом первым БПЛА обследуется внутреннее пространство разрушенного объекта инфраструктуры, вторым БПЛА - местность и кровля объекта. Допустимые расстояния БПЛА от предельных границ полета определяются безопасностью полета и наличием устойчивой связи. При этом второй БПЛА является ретранслятором данных по радиоканалу от первого БПЛА, который в случае неустойчивой локальной связи передает информацию от первого БПЛА на вычислительное устройство.
Из существующего уровня техники известны решения по обследованию состояния зданий и сооружений.
Известно изобретение «Способ диагностирования металлических мостовых конструкций и устройство для его осуществления» по патенту RU 2391655 С2. Способ заключается в приеме, регистрации сигналов с акустических преобразователей и динамической деформации с тензодатчиков, оценке параметров сигналов акустической эмиссии в момент нагружения мостовой металлической конструкции, например, проходящим поездом, оцифровке акустических сигналов, их предварительной обработке, фильтрации помех, регистрации времени прихода акустических сигналов и вычислении по нему координат развивающихся дефектов. Согласно данного способа мостовую конструкцию разбивают на N зон, в каждой из которых закрепляют четыре акустических преобразователя, образующих пьезоантенну, и тензодатчики, при этом регистрацию сигналов акустической эмиссии в зоне начинают в момент обнаружения изменения знака производной деформации на положительный и превышении ею порогового значения и прекращают в момент обнаружения изменения знака производной деформации на положительный на другом тензодатчике этой зоны, а о месте расположения дефекта судят по разности времени прихода сигналов в пьезоантенне, зарегистрировавшей акустические сигналы. Данное решение относится к способам исследования и анализа материалов с помощью ультразвуковых, звуковых или инфразвуковых волн, его применение возможно в случаях отсутствия необходимости визуального обследования конструкций, когда визуальное обследование не обеспечит получение надлежащего результата.
Известные различные решения (RU 2323435 С2, RU 2748789 С1, RU 2625625 С2, RU 2365895 C1, RU 2582277 С1 и др.), использование которых позволяет выполнить обследование состояния конструкций. Вместе с тем, данные решения предназначены для оценки несущей способности конструкций при длительной эксплуатации объекта, когда несущая способность закономерно снижается по причине физического износа. Поэтому данные способы не применимы в случае необходимости экспресс-оценки состояния объектов при различных ситуациях природного и техногенного характера (землетрясения, разрушения в случае воздействия средств огневого поражения и др.).
Из существующего уровня техники известен «Способ обследования закрытых подземных выработок с применением беспилотных летательных аппаратов» (по патенту Российской Федерации на изобретение RU 2 708 799 С1 от 11.12.2019 г.), принятый в качестве прототипа заявленного технического решения. Способ реализуется путем использования не менее трех беспилотных летательных аппаратов (БПЛА), оснащенных полезной нагрузкой для проведения обследований. При этом первый БПЛА является ведущим, остальные - ведомыми. Ведущий БПЛА занимает нижний высотный эшелон, второй БПЛА - промежуточный, третий - верхний. Допустимые расстояния БПЛА от предельных границ полета определяются безопасностью полета и наличием устойчивой связи. При этом второй БПЛА является ретранслятором данных по радиоканалу от первого БПЛА третьему БПЛА, который также по радиоканалу связан с наземной базовой станцией управления, передавая полученные данные наблюдения ведомого БПЛА и получая команды управления полетом или изменения программы полета. При этом, если устойчивая связь не обеспечивается, производят возврат всех БПЛА в стартовое положение. Обеспечивается повышение качества обследования закрытых подземных выработок неразрушающими методами, увеличение дальности обследований.
Недостатком указанного способа обследования закрытых подземных выработок с применением беспилотных летательных аппаратов является использование трех летательных аппаратов, что повышает экономические затраты и отсутствие IT-камеры, способной проводить выделение обследуемых объектов, отсутствие возможности построения 3D моделей объекта, что снижает возможность объективной оценки технического состояния объекта и усложняет процесс принятия организационно-технологических решений по восстановлению состояния конструкций.
Предложенное авторами изобретение позволяет устранить выявленные недостатки известного технического решения.
Технический результат заключается в повышении точности оценки технического состояния разрушенного объекта инфраструктуры, сокращении времени на проведение обследования объекта по сравнению с традиционными визуальными методами обследования состояния конструкций, обеспечении построения 3D модели повреждения объекта и снижении количества используемых БПЛА до двух по сравнению со способом-прототипом.
Указанный технический результат достигается следующим образом. Общими признаками прототипа и заявляемого способа является то, что для обследования разрушенного объекта инфраструктуры берется п беспилотных летательных аппаратов (БПЛА), второй БПЛА является ретранслятором данных по радиоканалу, БПЛА применяют с возможностью вертикального, горизонтального перемещений и зависания в воздушном пространстве, на БПЛА устанавливают полезную нагрузку, позволяющую контролировать расстояние от БПЛА до предельных границ полета, и полезную нагрузку, позволяющую получать разведывательную информацию.
Отличительными признаками заявляемого способа являются:
1. использование двух БПЛА с разделением функциональных задач, где первый БПЛА непосредственно находится во внутреннем пространстве разрушенного объекта инфраструктуры и передает изображение строительных конструкций, второй БПЛА находится в воздушном пространстве в состоянии зависания над разрушенным объектом инфраструктуры для видеонаблюдения за местностью и обследования кровельной части объекта.
2. использование для обследования БПЛА, оснащенных 1Т-камерами, отличающимися по своему функциональному назначению, позволяющими передавать изображение на аппаратно-программный комплекс в онлайн-режиме с разной подцветкой фиксируемых объектов.
3. использование для обследования аппаратно-программного комплекса состоящего, по крайней мере, из трех вычислительных устройств, где два из трех вычислительных устройства выводят изображение от каждого БПЛА, третье вычислительное устройство визуализирует разрушенный объекта инфраструктуры в 3D модели, отображая движение первого БПЛА посредством получения локального сигнала и определения координат БПЛА.
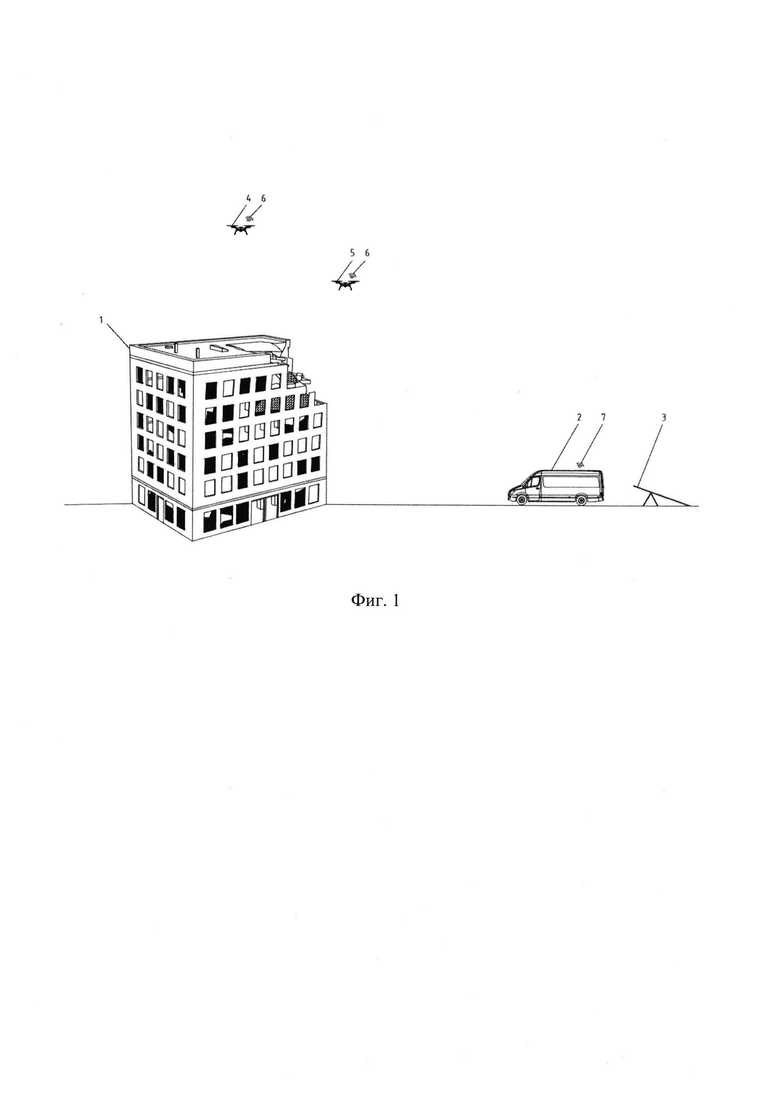
На фиг. 1 представлена схема расположения машины, оснащенной аппаратно-программным комплексом, разрушенный объект инфраструктуры и БПЛА.
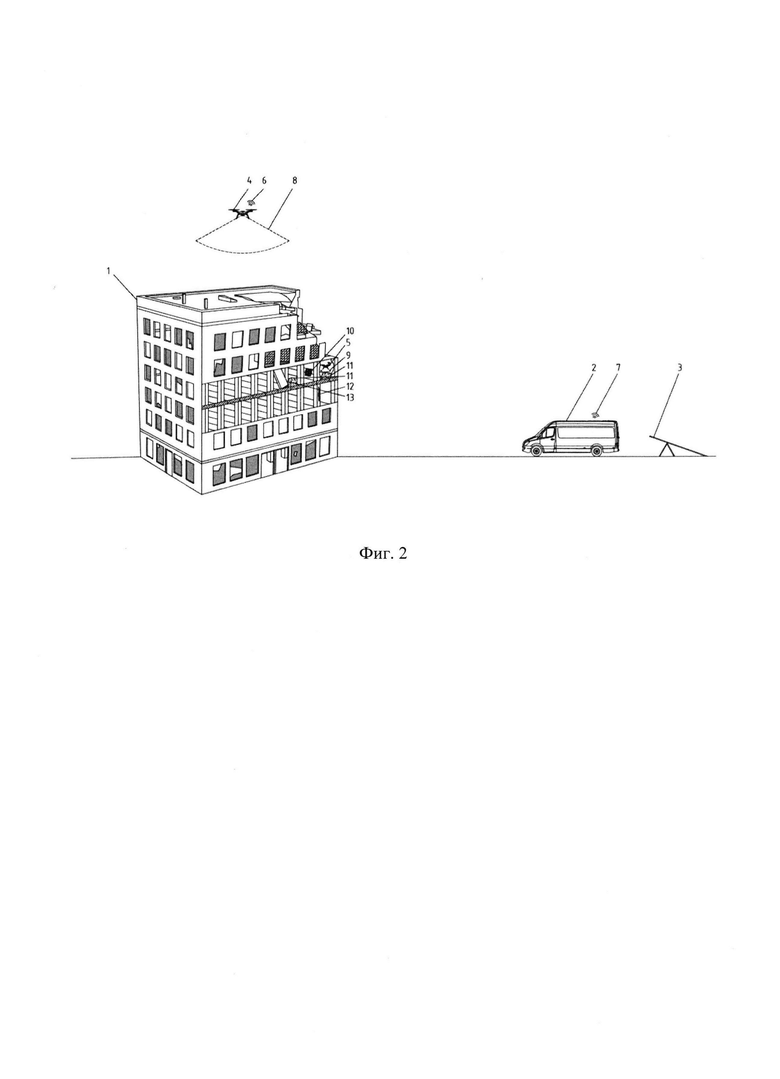
На фиг. 2 представлена схема действия обоих БПЛА по своим функциональным назначениям.
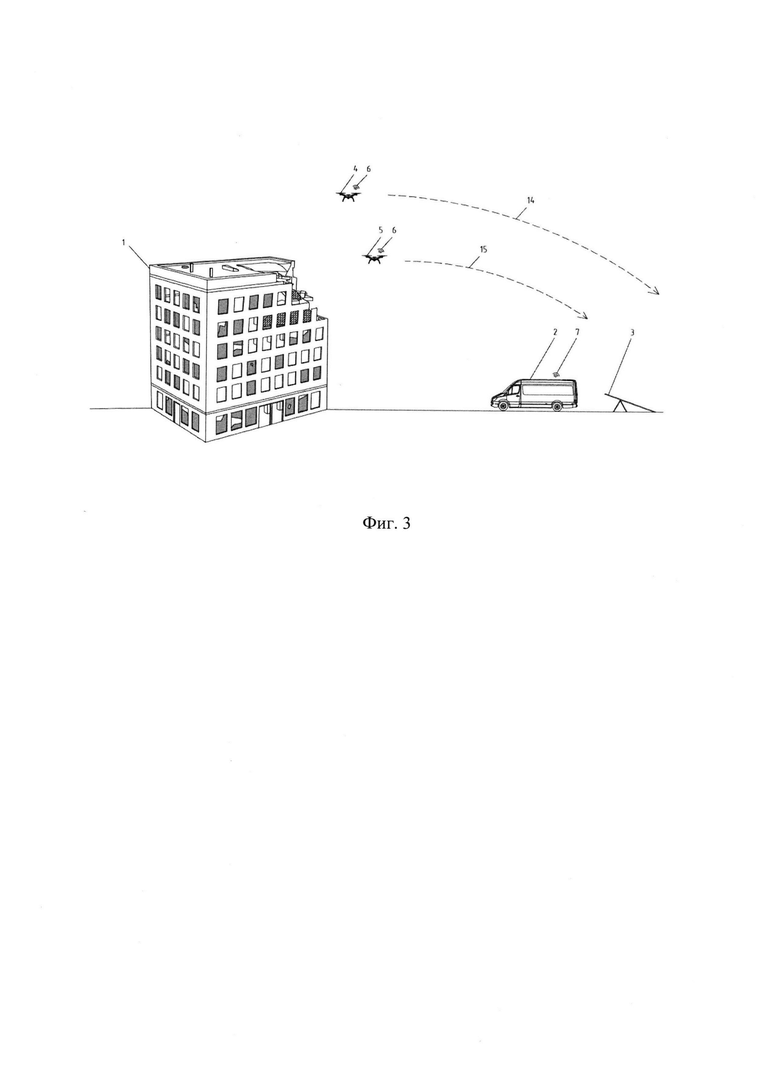
На фиг. 3 представлена схема завершения процесса обследования БПЛА.
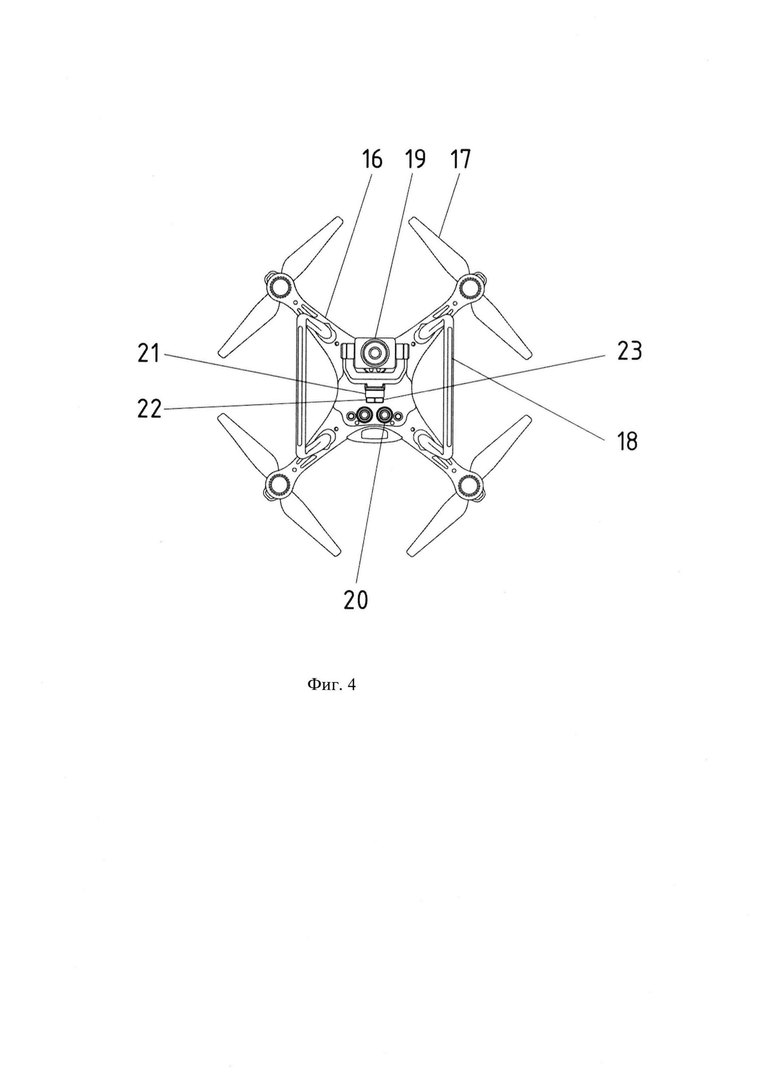
На фиг. 4 представлена схема технического устройства БПЛА.
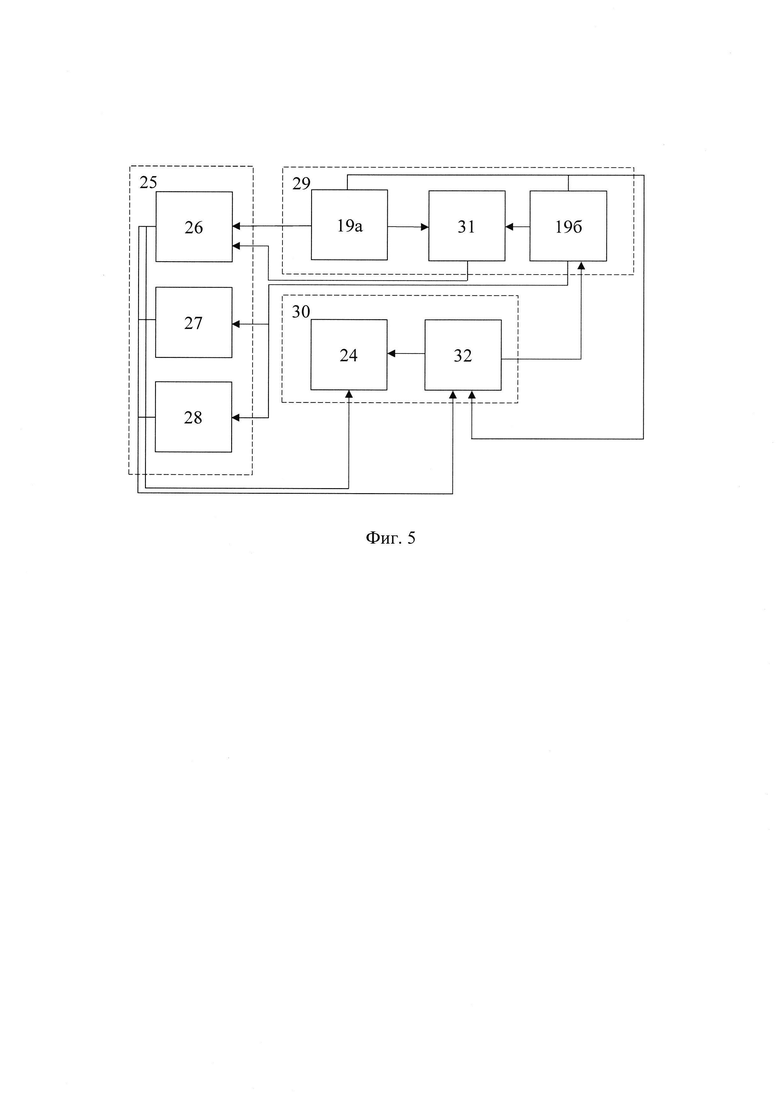
На фиг. 5 представлена схема аппаратно-программного комплекса.
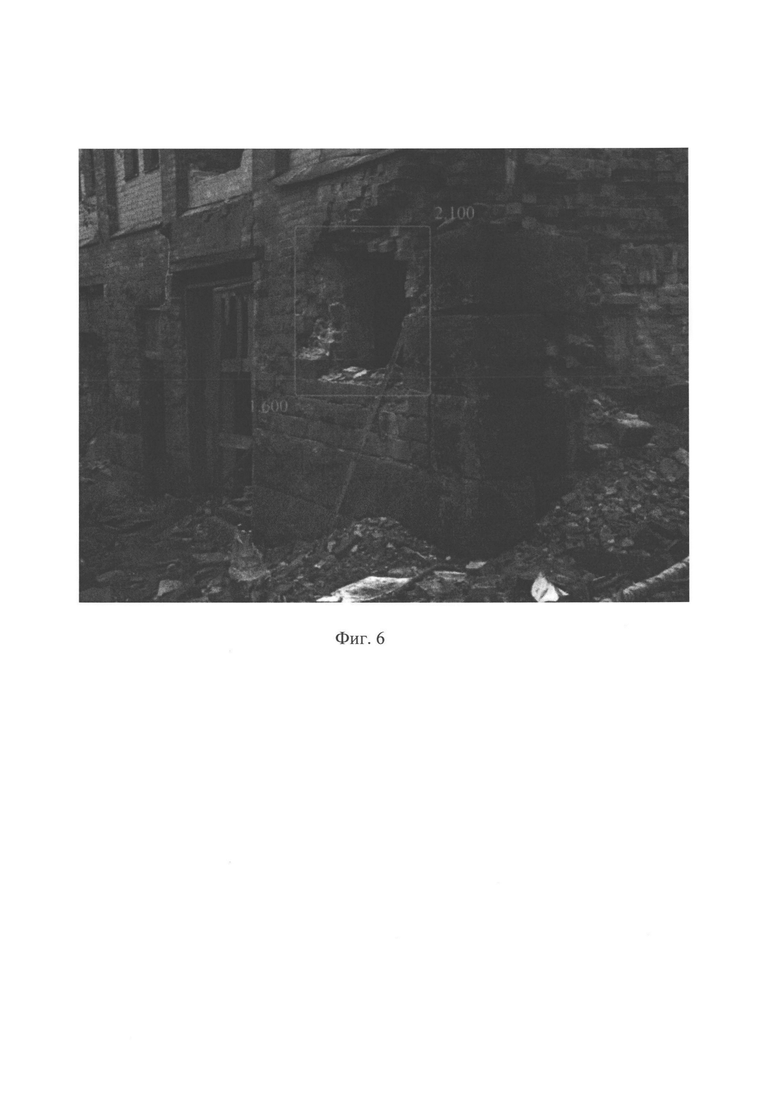
На фиг. 6 представлено предполагаемое изображение БПЛА при обнаружении пробития в несущей стене.
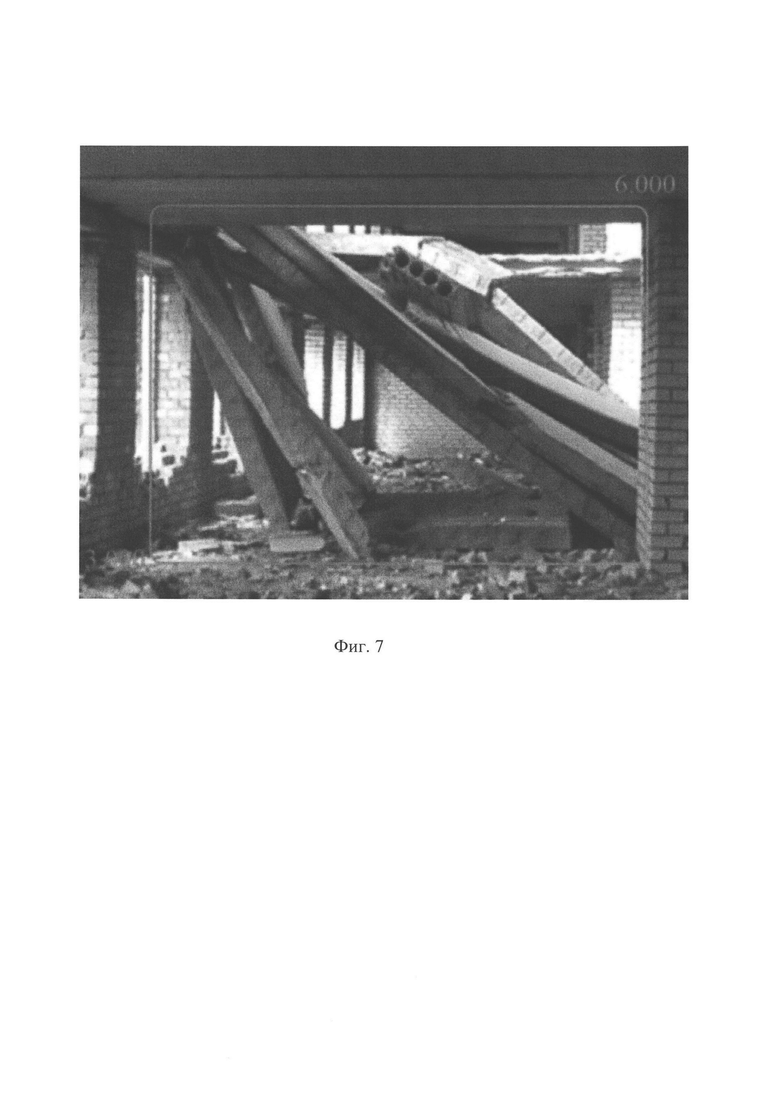
На фиг. 7 представлено предполагаемое изображение БПЛА при обнаружении повреждения строительных конструкций.
На представленных фигурах используются следующие обозначения арабскими цифрами:
1 - разрушенный объект инфраструктуры;
2 - автомашина, оснащенная аппаратно-программным комплексом;
3 - оборудования для старта БПЛА;
4 - второй БПЛА;
5 - первый БПЛА;
6 - радиоканал БПЛА;
7 - аппаратно-программный комплекс;
8 - область сканирования второго БПЛА;
9 - область сканирования первого БПЛА;
10 - обрушенная колонна;
11 - завалы;
12 - трещина;
13 - обрушенная плита перекрытия;
14 - траектория движения второго БПЛА;
15 - траектория движения первого БПЛА;
16 - БПЛА;
17 - винты БПЛА;
18 - стойки БПЛА;
19 - IT-камера;
19а - IT-камера первого БПЛА;
19б - IT-камера второго БПЛА;
20 - полезная нагрузка;
21 - ретранслятор;
22 - блок записи информации;
23 - блок GPS;
24 - сервер;
25 - модуль обработки и визуализации информации;
26 - первое вычислительное устройство;
27 - второе вычислительное устройство;
28 - третье вычислительное устройство;
29 - модуль получения информации;
30 - модуль программного обеспечения;
31 - ретранслятор второго БПЛА;
32 - блок питания оборудования.
Применение способа обследования поврежденного объекта инфраструктуры осуществляется следующим образом.
На безопасном расстоянии от разрушенного объекта инфраструктуры 1 останавливается автомашина 2, в которой находятся аппаратно-программный комплекс 7, оборудование для старта БПЛА 3 и два БПЛА 4 и 5. При этом используют БПЛА, выполненные в виде телеуправляемого аппарата вертолетного типа, в форме обычного квадрокоптера, выполненного на традиционной Х-образной раме с 8-ю стандартными несущими винтами и со схемой управления полетом аппарата типа DJI А-2, обладающего временем автономного полета до 80 мин. Частоту радиоканала для управления полетом беспилотных летательных аппаратов используют размером F-2,4 ГГц, частоту радиоканала для качественной видеосвязи используют размером F-1,2 ГГц. На БПЛА устанавливаются 1Т-камеры 19, связанные с аппаратно-программным комплексом 7 локальной связью, которые перевозятся в герметичном контейнере. После проверки изображения и связи, БПЛА посредством использования оборудования для старта 3, направляются в сторону разрушенного объекта инфраструктуры 1 путем управления пультом управления БПЛА, находящемся в системе аппаратно-программного комплекса (на фигурах не показано). При этом второй БПЛА 4 занимает положение в воздушном пространстве выше, чем первый БПЛА 5.
При приближении к разрушенному объекту инфраструктуры 1 второй БПЛА 4 занимает место над зданием в воздушном пространстве в положении зависания. Задача второго БПЛА 4 заключается в обследовании местности и кровли объекта инфраструктуры на предмет оценки состояния строительных конструкции и степени повреждения отдельных элементов. С этой целью IT-камера 19, установленная на втором БПЛА 4, выводит полученное изображение на аппаратно-программный комплекс 7 в черно-белом виде с подвеской разных цветов обнаруженных элементов. Так, пробитие в кровле выделяются коричневым цветом, трещины - желтым.
При приближении к разрушенному объекту инфраструктуры 1 первый БПЛА 5 проникает во внутреннее пространство здания путем нахождения открытых пространств в кровельной части объекта 1 или в несущих стенах. Во внутреннем пространстве первый БПЛА 5 проводит сканирование строительных конструкций посредством работы IT-камеры 19, которая запрограммирована на анализ повреждений здания. Путем использования первого БПЛА 5 на аппаратно-программный комплекс 7 поступает черно-белое изображение с выделением повреждений строительных конструкций. Так трещины 12 в колоннах, стенах, перекрытиях выделяются красным цветом, завалы 11 - оранжевым, обрушенные строительные конструкции 10 и 13 - зеленым, процесс горения - фиолетовым. Первый БПЛА 5 оснащен полезной нагрузкой 20, что позволяет контролировать расстояние до предельных границ полета.
По мере продвижения первого БПЛА 5 во внутреннем пространстве разрушенного объекта 1 в условиях ограничения локальной связи или помех, второй БПЛА 4 использует ретранслятор 21, который в случае прекращения передачи данных первого БПЛА 5 с программно-аппаратным комплексом 7 осуществляет передачу данных по радиоканалу 6.
По мере разряжения батареи одного из двух БПЛА принимается решение об их возвращении к автомашине 2, оснащенной аппаратно-программным комплексом 7. Для вывода первого БПЛА 5 из разрушенного объекта инфраструктуры 1 используется вычислительное устройство 26, где схематично изображается визуализация объекта и движение БПЛА во внутреннем пространстве здания путем определения координат. Посредством определения наличия открытого пространства в несущей стене или кровле, пользователь, основываясь на данных вычислительного устройства 26, выводит БПЛА 5 в воздушное пространство, поднимая на уровень выше поврежденного здания, но ниже второго БПЛА 4, после чего отправляет его к машине 2, оснащенной аппаратно-программным комплексом 7. При этом второй БПЛА 4 уходит вслед за первым на разном уровне в воздушном пространстве.
Предлагаемый аппаратно-программный комплекс 7 для контроля процессов обследования разрушенного объекта инфраструктуры 2 включает в себя удаленный сервер 24 и, по меньшей мере, три вычислительных устройства 26, 27, и 28, связанных с двумя БПЛА 4, 5 для осуществления сканирования технического состояния строительных конструкций, образующих модуль получения информации 29, модуль обработки и визуализации информации 25, модуль программного обеспечения 30.
Удаленный сервер 24 предназначен для хранения трехмерной информационной модели конструкции и связанных с ней данных, сохранения новых передаваемых данных, а также предоставления к ним доступа пользователям. Число пользователей аппаратно-программного комплекса 7 составляет трех человек. Первоначально на сервере 24 записывают трехмерную информационную модель, например, в формате fbx, посредством получения данных сканирования IT-камеры 19б второго БПЛА 4 путем передачи информации на вычислительное устройство аппаратно-программного комплекса 7, предназначенного для трехмерной визуализации объекта инфраструктуры с выделением координат основных элементов здания и обоих БПЛА. Любой процесс приема-передачи данных посредством модуля получения информации 30 происходит при наличии связи с удаленным сервером 24.
В аппаратно-программный комплекс 7 включен модуль, идентифицирующий положение всех элементов в координатной системе (GPS), связанный с вычислительным устройством во время обследования, определяя их территориальное положение (на фигурах не показан).
IP-камеры представляют собой неметрические камеры с матрицей IMX335 и светочувствительностью 0.001 люкс, каждая из которых оснащена КМОП-матрицей, объективом, интерфейсом Ethernet и питанием по технологии Power over Ethernet (РоЕ), имеющая следующие характеристики: сенсор 1-2.8" CMOS, скорость затвора 1/3 - 1/10000 сек, объектив 2.8 mm@F2.0: горизонталь 86°, максимальное разрешение 5 МП, 2592×1944, размер пикселя 0.002 мкм.
Работа системы взаимодействия субъектов обследования поясняется аппаратно-программным комплексом, представленным на фигуре 5, где 24 - сервер, 25 - модуль обработки и визуализации информации, 26 - первое вычислительное устройство, 27 - второе вычислительное устройство, 28 - третье вычислительное устройство, 29 - модуль получения информации, 19а - IT-камера первого БПЛА, 196 - IT-камера второго БПЛА, 30 - модуль программного обеспечения, 31 - ретранслятор второго БПЛА, 32 - блок питания оборудования. Представленная система состоит из трех модулей 25, 29 и 30, содержащих отдельные элементы по своим функциональным задачам. Модуль получения информации 29 посредством действия IT-камер первого и второго БПЛА 19а, 19б отправляет изображение на модуль обработки и визуализации информации 25, причем существуют разграничения среди структурных элементов системы. Так информация, представленная в виде изображения исходящая от первого БПЛА 5, поступает только на одно вычислительное устройство. В свою очередь информация, представленная в виде изображения и исходящая от второго БПЛА 4, поступает на два вычислительных устройства, одно из которых представляет разрушенный объект инфраструктуры, другое - представляет разрушенный объект инфраструктуры в 3D проекции. Вся информация поступает на сервер 24 аппаратно-программного комплекса 7 модуля программного обеспечения 30, кроме этого имеющего блок питания оборудования 32, позволяющего контролировать техническое состояние БПЛА 4 и 5, и ретранслятор 31 второго БПЛА 4. Ретранслятор 31 находится в модуле получения информации 29, является аварийным вариантом передачи информации первого БПЛА 5 на вычислительное устройство 26 посредством использования локальной связи второго БПЛА 4. Для этого блок питания оборудования 32 передает сигнал на второй БПЛА 4 о включении режима ретранслятора 31.
Таким образом, применение способа дистанционного обследования разрушенных объектов инфраструктуры позволит проводить обследование за счет использования IT-камер БПЛА и аппаратно-программного комплекса, что существенно сокращает сроки проведения обследования объекта инфраструктуры, а также позволяет эффективно представить информацию о разрушениях отдельных строительных конструкций.
По полученным данным обоих БПЛА проводится оценка технического состояния строительных конструкций разрушенного объекта инфраструктуры. По изображениям, сделанным первым БПЛА, делается вывод о возможности или целесообразности проведения реконструкции или сноса всего здания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ строительства фортификационных сооружений в труднодоступных районах | 2023 |
|
RU2823664C1 |
| Система с ролевым управлением доступом к организации эксплуатационного содержания зданий и сооружений | 2022 |
|
RU2801374C1 |
| СПОСОБ ПРИМЕНЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО УПРАВЛЕНИЯ | 2011 |
|
RU2457531C1 |
| КОМПЛЕКС ОБЕСПЕЧЕНИЯ РАДИОСВЯЗИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) НА ТЕРРИТОРИИ С РАЗРУШЕННОЙ ИНФРАСТРУКТУРОЙ СВЯЗИ В ЗОНАХ СТИХИЙНОГО БЕДСТВИЯ И ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2013 |
|
RU2554517C2 |
| Способ реконструкции причала военно-морской базы | 2022 |
|
RU2797793C1 |
| Способ строительства военно-морской базы на открытом участке воды | 2022 |
|
RU2797792C1 |
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| СИСТЕМА ДИСТАНЦИОННОГО НАБЛЮДЕНИЯ И УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2793713C1 |
| СИСТЕМА РАДИОСВЯЗИ С БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2024 |
|
RU2839424C1 |
| Система и способ обнаружения и противодействия беспилотным летательным аппаратам | 2019 |
|
RU2755603C2 |
Изобретение относится к способу дистанционного обследования разрушенных объектов инфраструктуры. Для дистанционного обследования берут n беспилотных летательных аппаратов (БПЛА), второй БПЛА из которых является ретранслятором данных по радиоканалу. На БПЛА устанавливают полезную нагрузку, позволяющую контролировать расстояние от БПЛА до предельных границ полета, и полезную нагрузку, позволяющую получать разведывательную информацию, при этом один БПЛА непосредственно находится во внутреннем пространстве разрушенного объекта инфраструктуры и передает изображение строительных конструкций, второй БПЛА находится в воздушном пространстве в состоянии зависания над разрушенным объектом инфраструктуры для видеонаблюдения за местностью и обследования кровельной части объекта. Обеспечивается повышение точности оценки технического состояния разрушенного объекта инфраструктуры, сокращение времени на проведение обследования объекта. 1 з.п. ф-лы, 7 ил.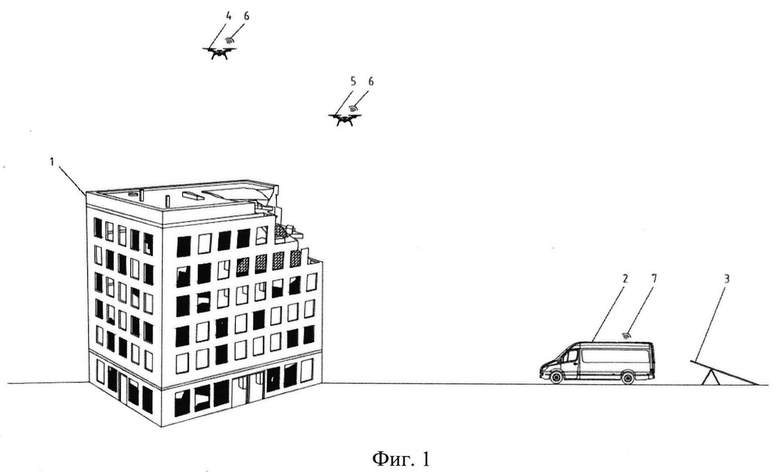
1. Способ дистанционного обследования разрушенных объектов инфраструктуры, основанный на том, что берется n беспилотных летательных аппаратов (БПЛА), второй БПЛА является ретранслятором данных по радиоканалу, БПЛА применяют с возможностью вертикального, горизонтального перемещений и зависания в воздушном пространстве, на БПЛА устанавливают полезную нагрузку, позволяющую контролировать расстояние от БПЛА до предельных границ полета, и полезную нагрузку, позволяющую получать разведывательную информацию, отличающийся тем, что n=2, при этом каждый БПЛА применяют по своим функциональным задачам, где первый БПЛА непосредственно находится во внутреннем пространстве разрушенного объекта инфраструктуры и передает изображение строительных конструкций, второй БПЛА находится в воздушном пространстве в состоянии зависания над разрушенным объектом инфраструктуры для видеонаблюдения за местностью и обследования кровельной части объекта, при этом для обследования используют БПЛА, оснащенные IP-камерами, отличающимися по своему функциональному назначению, позволяющими передавать изображение на аппаратно-программный комплекс в онлайн-режиме с разной подцветкой фиксируемых объектов.
2. Способ дистанционного обследования разрушенных объектов инфраструктуры по п. 1, отличающийся тем, что аппаратно-программный комплекс состоит по крайней мере из трех вычислительных устройств, где два из трех вычислительных устройства выводят изображение от каждого БПЛА, третье вычислительное устройство визуализирует разрушенный объект инфраструктуры в 3D-модели, отображая движение первого БПЛА посредством получения локального сигнала и определения координат БПЛА.
| US 10972717 B2, 06.04.2021 | |||
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2012 |
|
RU2510500C1 |
| КОМПЛЕКС ОБЕСПЕЧЕНИЯ РАДИОСВЯЗИ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА (БПЛА) НА ТЕРРИТОРИИ С РАЗРУШЕННОЙ ИНФРАСТРУКТУРОЙ СВЯЗИ В ЗОНАХ СТИХИЙНОГО БЕДСТВИЯ И ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2013 |
|
RU2554517C2 |
| СПОСОБ НЕРАЗРУШАЮЩЕГО ОПТИКО-ВИЗУАЛЬНОГО КОНТРОЛЯ ИЗДЕЛИЙ МЕТОДОМ МАШИННОГО ЗРЕНИЯ | 2021 |
|
RU2777718C1 |
| Застежка для одежды, обуви и т.п. | 1930 |
|
SU23939A1 |
