Настоящее изобретение относится к способу управления аэродинамическими моментами: тангажа, крена и рыскания, винтокрылого летательного аппарата - вертолета соосной схемы со струйной системой управления.
Вертолеты соосной схемы отличаются от вертолетов других схем тем, что в конструкции их винтовой системы используются два несущих винта, вращающихся вокруг общей оси в противоположных направлениях.
Из уровня техники известны вертолеты соосной схемы и системы управления такими вертолетами RU 2417922 C2, 10.05.2011; SU 1826423 A1, 10.12.1995; RU 2726560 C1, 14.07.2020; RU 2658467 C1, 21.06.2018; US 11597507 B2, 07.03.2023; US 6886777 B2, 03.05.2005; US 7967239 B2, 28.06.2011.
Конструктивно-аэродинамическая схема соосного вертолета обеспечивает возможность как взаимно уравновесить реактивные моменты верхнего и нижнего несущих винтов, так и обеспечить возможность управления тягой соосного винта, моментами тангажа, крена и рысканья вертолета на всех режимах полета с помощью системы управления соосного несущего винта, представляющей собой специальную сложную механическую конструкцию, обеспечивающую возможность управления углами установки лопастей в зависимости от их азимутального положения.
Для управления тягой соосного несущего винта производится одновременное изменение углов установки всех его лопастей подсистемой управления общим шагом.
Для управления моментом рысканья вертолета соосной схемы производится противоположно направленное изменение углов установки лопастей верхнего и нижнего соосных несущих винтов подсистемой управления дифференциальным общим шагом.
Для управления моментами тангажа и крена вертолета соосной схемы с помощью автоматов перекоса производится согласованное циклическое изменение углов установки лопастей верхнего и нижнего соосных несущих винтов подсистемами управления циклическим шагом в продольном и поперечном каналах.
Таким образом, система управления вертолетов соосной схемы - сложная механическая система, содержащая большое количество элементов, в том числе, такие сложные элементы, как автоматы перекоса, без которых управление вертолетом невозможно, и системы их приводов. Элементы такой системы управления подвержены большим переменным нагрузкам, особенно на высоких скоростях полета и/или при маневрировании с большими перегрузками, что снижает надежность и ресурс системы и накладывает существенные ограничения на параметры и компоновку лопастей несущих винтов.
В данном изобретении предложен альтернативный способ управления вертолетом соосной схемы по тангажу, крену и рысканью с помощью струйной системы управления в разных вариантах исполнения такой системы управления.
Известна струйная система путевого управления одновинтового вертолета NOTAR (без хвостового винта), описанная в патенте US 4948068 А, 14.08.1990. Такая система путевого управления одновинтовым вертолетом применяется вместо рулевого винта, обеспечивая компенсацию реактивного момента несущего винта и управление в канале рысканья. Струйная система NOTAR состоит из воздухозаборника, вентилятора, установленного в задней части фюзеляжа, воздушного канала в хвостовой балке, системы воздушных щелевых сопел системы суперциркуляции, расположенных вдоль образующих хвостовой балки, и хвостового сопла изменяемой площади.
Недостатком такого решения является его одноканальность, то есть невозможность создания с помощью такой системы управляющих моментов крена и тангажа вертолета, что приводит к необходимости использования в системе управления вертолета также и автомата перекоса и других взаимодействующих с ними элементов механической системы управления. Также этот вертолет является одновинтовым.
Известна также струйная система управления моментами крена и рысканья самолетов вертикального взлета и посадки Як-36, Як-38, Як-141, AV-8 Harrier, F-35 и др., состоящая их двух воздушных каналов отбора сжатого воздуха от двигателя, расположенных вдоль размаха консолей крыла и двух управляемых реактивных сопел на оконечностях консолей крыла. Управление величинами моментов крена самолета вертикального взлета и посадки осуществляется с помощью дифференциального изменения давления и расхода воздуха через управляемые сопла, направляющие сжатый воздух вниз, а управление величинами моментов рысканья осуществляется за счет отклонения осей управляемых сопел от вертикали на сравнительно небольшие углы (разные по знаку для правого и левого сопла) в плоскостях, примерно параллельных плоскости симметрии самолета.
Такая струйная система также не решает задачу управления моментами тангажа, крена и рыскания без использования автоматов перекоса в механической системе управления вертолета соосной схемы.
Задачей, на которую направлено предлагаемое техническое решение, является разработка способа управления моментами тангажа, крена и рысканья вертолетов соосной схемы с использованием конструкции без автоматов перекоса и других, взаимодействующих с ними элементов.
Техническим результатом является упрощение и удешевление винтовой системы, повышение ее надежности, безотказности и ресурса.
Технический результат достигается благодаря способу управления аэродинамическими моментами вертолета соосной схемы, имеющего соосные несущие винты с приводом вращения, две трубчатые хвостовые балки, присоединенные к фюзеляжу вертолета и разнесенные по разные стороны от плоскости симметрии вертолета, струйную систему управления, включающую управляемые сопла, расположенные на оконечностях балок. Способ управления моментами указанного вертолета характеризуется тем, что момент тангажа создают синхронным поворотом сопел и/или изменением площади их выходных сечений, момент крена создают разнонаправленным поворотом сопел и/или изменением площади их выходных сечений, момент рыскания создают изменением частоты вращения верхнего и нижнего соосных несущих винтов и/или разнонаправленным изменением давления или расхода воздуха через сопла левой и правой балок аппарата.
Рассмотрим предложенный способ управления аэродинамическими моментами вертолета соосной схемы на примере малоразмерного беспилотного вертолета соосной схемы без автоматов перекоса со струйной системой управления и непосредственным приводом несущих винтов с помощью электродвигателей (вариант 1) и на примере малоразмерного беспилотного вертолета соосной схемы без автоматов перекоса со струйной системой управления с трансмиссией и двигателем внутреннего сгорания (вариант 2).
На фиг. 1 представлена принципиальная схема малоразмерного беспилотного вертолета соосной схемы без автоматов перекоса со струйной системой управления и непосредственным приводом несущих винтов с помощью электродвигателей.
Позициями на фиг. 1 обозначены:
1 - фюзеляж;
2 - источник электроэнергии;
3 - электродвигатели верхнего и нижнего несущих винтов;
4 - хвостовые балки;
5 - управляемые реактивные сопла;
6 - вентиляторы струйной системы управления (импеллеры);
7 - лопасти соосных несущих винтов;
8 - втулки соосных несущих винтов;
9 - шасси.
На фиг. 2 представлена принципиальная схема малоразмерного беспилотного вертолета соосной схемы без автоматов перекоса со струйной системой управления с трансмиссией и двигателем внутреннего сгорания.
Позициями на фиг. 2 обозначены:
10 - двигатель внутреннего сгорания;
11 - трансмиссия;
12 - силовой вентилятор.
На фиг. 3 представлена схема простейшего поворотного сопла.
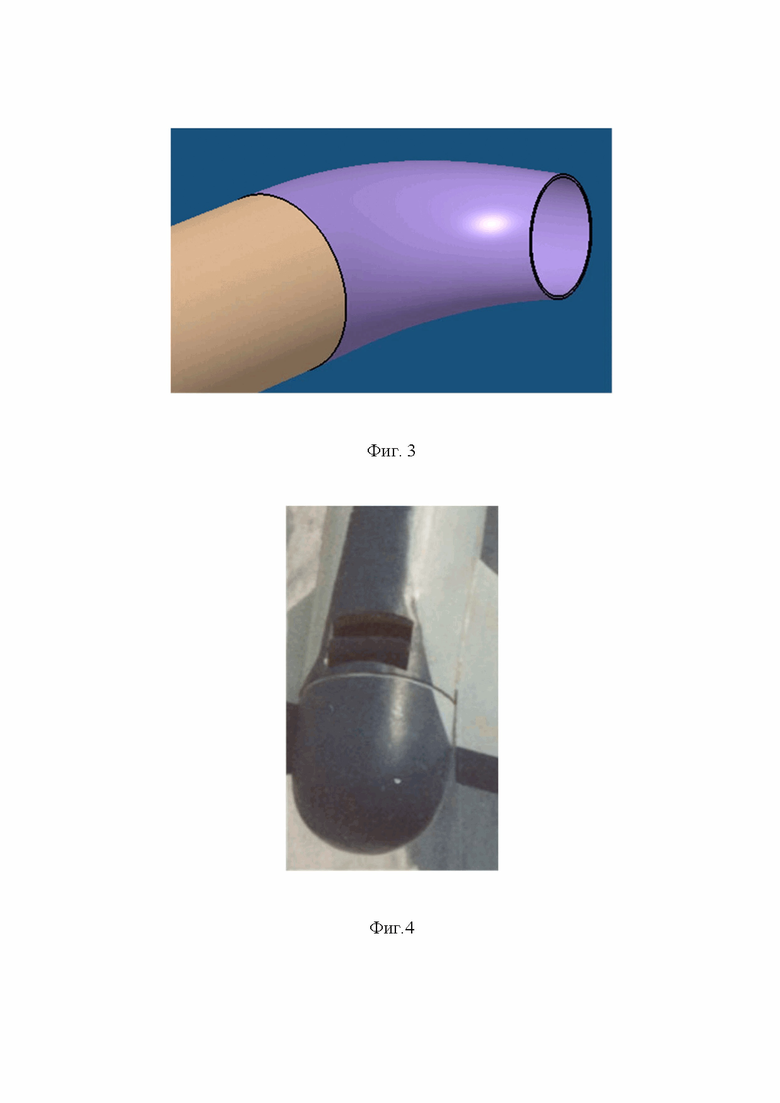
На фиг. 4 показано сопло с изменяемой площадью выходного сечения.
Вертолет по варианту 1 (фиг. 1) содержит:
- фюзеляж 1 с воздухозаборниками (на фигурах условно не показаны), выполненными любой известной и подходящей к геометрии фюзеляжа конструкции (обеспечивающими снабжение струйной системы управления потребным расходом воздуха, в том числе - необходимым для охлаждения агрегатов), позволяющий разместить основные системы и агрегаты вертолета и отсеки для полезной нагрузки, запас энергии 2 (например, аккумулятор или топливные элементы) и отсеки для полезной нагрузки;
- соосный несущий винт, состоящий из верхнего и нижнего винтов, без системы циклического управления шагом лопастей, состоящий из лопастей 7 и втулок 8 верхнего и нижнего несущих винтов;
- системы приводов 3 (электродвигатели), обеспечивающих независимое вращение верхнего и нижнего несущих винтов;
- две трубчатые хвостовые балки 4, разнесенные по разные стороны от плоскости симметрии вертолета, оси которых могут быть расположены под острыми углами к плоскости симметрии вертолета, либо могут быть параллельными, причем расстояние от плоскости симметрии вертолета до выходного сечения сопел выбирают в диапазоне 0,3 - 0,8 радиуса несущего винта, а расстояние от плоскости, перпендикулярной плоскости симметрии вертолета и проходящей через ось несущего винта, до выходного сечения сопел выбирают в диапазоне 0,5 - 1,2 радиуса несущего винта;
- струйная система управления, которая включает последовательно расположенные воздухозаборники, вентиляторы 6 с индивидуальными приводами (импеллеры), внутренние воздушные каналы (на фигурах условно не показаны), расположенные в хвостовых балках и управляемые сопла 5 на их оконечностях;
- шасси 9.
Отличие компоновки соосного вертолета по варианту 2 (фиг.2) от компоновки соосного вертолета по варианту 1 (фиг.1) состоит в том, что вместо электродвигателей используется двигатель внутреннего сгорания 10, для передачи крутящего момента использована трансмиссия 11, выполненная с возможностью передачи крутящего момента отдельно на верхний и на нижний соосные винты, вместо импеллеров используется силовой вентилятор 12, который вращается также посредством трансмиссии. Такая силовая установка приводит к определенному усложнению конструкции и условий эксплуатации, однако обеспечивает значительное увеличение продолжительности и дальности полета.
На практике, и для первого, и для второго варианта компоновки, если серийные импеллер или силовой вентилятор не удовлетворяют запросу по производительности, в струйную систему управления могут быть установлены два и более импеллера или два и более силовых вентилятора.
Рассмотрим принцип работы устройства управления аэродинамическими моментами вертолета соосной схемы и этапы способа управления таким вертолетом.
Воздух из воздухозаборников поступает в воздушные каналы и далее нагнетается в сопла соответствующим устройством. Это либо импеллеры с индивидуальными приводами, расположенные внутри фюзеляжа вблизи корневых сечений хвостовых балок (вар.1), либо силовой вентилятор, расположенный внутри фюзеляжа вблизи корневых сечений хвостовых балок (вар.2). Струйная система одновременно выполняет функции охлаждения силовой установки (СУ): электродвигателей или двигателя внутреннего сгорания и трансмиссии, то есть струйная система управления интегрирована с силовой установкой аппарата. Управляемые сопла, установленные на оконечностях хвостовых балок, присоединенных к фюзеляжу вертолета, оснащены механизмами поворота и/или перепускными окнами для изменения площади выходного сечения, для создания вертикальных и горизонтальных составляющих силы тяги.
Поворот сопла и изменение площади перепускных окон осуществляют с помощью электрического сервопривода или любого механического устройства, связанного с системой автоматического управления.
Необходимые для балансировки и управления вертолетом величины реактивных сил тяги хвостовых сопел регулируют, управляя расходом и/или давлением воздуха, поступающего от устройства для нагнетания воздуха струйной системы в ее каналы и далее в хвостовые сопла. Таким устройством может быть, например, приводимый от маршевого поршневого двигателя вентилятор с поворотными лопатками входного направляющего аппарата, или с поворотными лопатками рабочего колеса, в котором управляют расходом и давлением за счет изменения углов установки соответствующих лопаток (2 вариант). Конструктивно более простым устройством может быть импеллер - вентилятор в кольцевом канале, приводимый отдельным электродвигателем, в котором управляют расходом и давлением изменяя частоту вращения (1 вариант).
В результате обеспечивается возможность управления реактивными силами сопел струйной системы вертолета в горизонтальной и вертикальной плоскостях таким образом, что, сочетая их возможные комбинации, обеспечивают необходимые величины моментов крена, тангажа и рысканья как для балансировки, так и для управления угловым положением вертолета. Изменяя углы поворота сопел синхронно, управляют моментом тангажа, а асинхронно - моментом крена. Изменяя расход воздуха через сопла, изменяют величины реактивных сил (при синхронном изменении расходов через импеллеры), и управляют моментом рыскания (при асинхронном изменении расходов). Управление моментами рысканья вертолета соосной схемы дополнительно обеспечивают за счет дифференциального управления моментами несущих винтов на всех режимах полета. Благодаря индивидуальному управлению маршевыми двигателями несущих винтов имеется возможность независимо и согласованно изменять частоты вращения верхнего и нижнего винтов. При этом соответствующим образом изменяются их крутящие моменты, а возникающая разница представляет собой результирующий момент рыскания, действующий на аппарат в целом, чем и достигается управление аппаратом. Такой способ обеспечивает максимальное упрощение (и, соответственно, удешевление) конструкции и повышение ее надежности.
Посредством хвостовых реактивных сопел вертолета соосной схемы без автоматов перекоса со струйной системой управления решают задачи создания вертикальных и горизонтальных составляющих реактивных сил. Хвостовые сопла могут быть различной конструкции. На фиг. 3 представлена схема простейшего поворотного сопла.
Ориентация выходящей струи воздуха такого сопла задает соотношение вертикальной и горизонтальной составляющих его силы тяги, а величина силы тяги сопла определяется импульсом истекающей струи воздуха, площадью его выходного сечения и избыточным давлением воздуха на его срезе. Требуемое сочетание горизонтальной Тг и вертикальной Тв составляющих силы тяги сопла достигают поворотом сопла на угол θ=arctg(Тв/Тг) относительно плоскости строительной горизонтали вертолета с помощью специального механического или электрического привода любой известной подходящей конструкции.
Таким образом, необходимое соотношение вертикальных и горизонтальных составляющих реактивной силы каждого сопла достигают поворотом реактивных сопел вокруг их оси вращения относительно оси, примерно параллельной строительной горизонтали вертолета на углы, определенные потребными для управления моментами. А управление величиной реактивной силы осуществляют за счет изменения напора и расхода воздуха струйной системы.
Возможен также вариант сопла, содержащего окна на верхней и нижней поверхности балки (фиг. 4). При этом управляют вертикальной составляющей суммарной реактивной силы сопла изменяя соотношения площадей верхнего и нижнего окна, например, посредством поворотной створки. При необходимости создания горизонтальной компоненты реактивной силы аналогичные окна размещают на боковых поверхностях оконечности балки. Такой вариант сопла может обеспечить повышение быстродействия системы управления, поскольку не требует обязательного изменения производительности (расхода/напора) относительно инерционного импеллера или силового вентилятора.
В зависимости от поставленной технической задачи возможно совмещение в конструкции сопла обоих способов управления величиной вертикальной и горизонтальной составляющих сил тяг реактивного сопла (и поворот и изменение площади выходного сечения) или увеличение количества сопел.
Необходимая для балансировки и управления вертолета величина равнодействующей реактивной силы тяги сопла достигается управлением массовым расходом и давлением воздуха в его струйной системе управления, изменяя частоту вращения устройства для нагнетания воздуха (импеллеров или силового вентилятора) или изменяя углы установки его рабочих лопаток - как рабочего колеса, так и направляющего и/или спрямляющего аппаратов.
При этом во всех вариантах компоненты реактивных сил тяг управляемых реактивных сопел на соответствующих плечах, параллельные плоскости строительной горизонтали вертолета, создают моменты рысканья, а перпендикулярные этой плоскости компоненты сил реактивных тяг управляемых реактивных сопел на соответствующих плечах, создают моменты тангажа и/или крена.
Таким образом, посредством устройства двухбалочной струйной системы вертолета соосной схемы обеспечивают возможность создания моментов тангажа, крена и рысканья, как для балансировки, так и для управления угловым движением вертолета:
- с помощью управления суммой горизонтальных составляющих тяг хвостовых сопел реализуют управление моментами рысканья вертолета;
- с помощью управления суммой вертикальных составляющих тяг хвостовых сопел реализуют управление моментами тангажа вертолета;
- управление моментами крена осуществляют за счет дифференциального (направленного в разные стороны) управления вертикальных составляющих сил тяг хвостовых сопел, разнесенных в противоположные стороны относительно плоскости симметрии вертолета.
Предлагаемый способ позволяет обеспечить пространственную ориентацию вертолета, в частности, посредством управления аэродинамическими моментами, а именно моментами тангажа, крена и рысканья вертолета соосной схемы без использования автоматов перекоса и других, взаимодействующих с ними элементов, что упрощает и удешевляет винтовую систему и повышает ее надежность, безотказность и ресурс.
Для отработки предлагаемого способа в НИЦ КИ и РВКЛА ЦАГИ создан экспериментальный аппарат-демонстратор, представляющий собой беспилотный вертолет с взлетной массой около 100 кг и диаметром соосных несущих винтов 2 м. Силовая установка включает два электродвигателя непосредственного привода соосных несущих винтов, аккумуляторную батарею и электронную систему управления. Струйная система содержит два импеллера, размещенные на входах хвостовых балок, закрепленных к фюзеляжу. На концах хвостовых балок установлены поворотные сопла, управляемые сервоприводами. Конструкция сопел соответствует показанной на фиг. 3. При ручном управлении аппаратом по сигналу ручки управления «от себя» или «на себя» сопла синхронно отклоняются, соответственно, вниз или вверх, создавая нужный момент тангажа. При отклонении ручки управления, например, влево, левое сопло отклоняется вверх, а правое - вниз, создавая момент крена влево. Таким образом, управление моментом тангажа осуществляют синхронным поворотом сопел, а моментом крена - их асинхронным поворотом. Согласованные отклонения сопел при одновременном управлении и по крену и по тангажу обеспечиваются бортовым вычислителем системы автоматического управления (САУ). САУ, по сигналам инерциальных датчиков (линейных и угловых скоростей и ускорений), обеспечивает также компенсацию случайных возмущений при полете, что существенно улучшает характеристики устойчивости и управляемости аппарата.
Управление моментом рыскания осуществляют согласованным изменением частот вращения верхнего и нижнего винтов посредством модулей управления двигателями. Дополнительно этот момент может управляться изменением режимов работы импеллеров. Импеллеры струйной системы обеспечивают также прокачку воздуха через фюзеляж и, соответственно, охлаждение компонентов силовой установки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертолет соосной схемы (варианты) | 2023 |
|
RU2820875C1 |
| СКОРОСТНОЙ СВЕРХМАНЕВРЕННЫЙ ВИНТОКРЫЛ | 2012 |
|
RU2480379C1 |
| САМОЛЕТ ПАВЛОВЫХ | 2000 |
|
RU2192986C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ СООСНЫЙ ЭЛЕКТРОВЕРТОЛЕТ | 2021 |
|
RU2753444C1 |
| СВЕРХЗВУКОВОЙ МАЛОЗАМЕТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2692742C1 |
| БЕСПИЛОТНЫЙ РЕАКТИВНЫЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2699513C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711760C2 |
| БЕСПИЛОТНЫЙ ТРАНСЗВУКОВОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2018 |
|
RU2711451C1 |
| БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ С ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ (ВАРИАНТЫ) | 2013 |
|
RU2527248C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ С ДВИЖИТЕЛЬНО-РУЛЕВОЙ СИСТЕМОЙ | 2016 |
|
RU2629478C2 |

Изобретение относится к области авиации, в частности к способам управления вертолетов соосной схемы. Вертолет соосной схемы имеет соосные несущие винты с приводом вращения, две трубчатые хвостовые балки, присоединенные к фюзеляжу вертолета и разнесенные по разные стороны от плоскости симметрии вертолета, струйную систему управления, включающую управляемые сопла, расположенные на оконечностях балок. Способ управления аэродинамическими моментами вертолета соосной схемы включает создание момента тангажа синхронным поворотом сопел и/или изменением площади их выходных сечений, момента крена разнонаправленным поворотом сопел и/или изменением площади их выходных сечений, момента рыскания изменением частоты вращения верхнего и нижнего соосных несущих винтов и/или разнонаправленным изменением давления или расхода воздуха через сопла левой и правой балок аппарата. Обеспечивается возможность управления моментами тангажа, крена и рысканья вертолетов соосной схемы без использования автоматов перекоса и других, взаимодействующих с ними элементов, повышение надежности, безотказности и ресурса. 4 ил.
Способ управления аэродинамическими моментами вертолета соосной схемы, имеющего соосные несущие винты с приводом вращения, две трубчатые хвостовые балки, присоединенные к фюзеляжу вертолета и разнесенные по разные стороны от плоскости симметрии вертолета, струйную систему управления, включающую управляемые сопла, расположенные на оконечностях балок, отличающийся тем, что момент тангажа создают синхронным поворотом сопел и/или изменением площади их выходных сечений, момент крена создают разнонаправленным поворотом сопел и/или изменением площади их выходных сечений, момент рыскания создают изменением частоты вращения верхнего и нижнего соосных несущих винтов и/или разнонаправленным изменением давления или расхода воздуха через сопла левой и правой балок аппарата.
| Способ производства сплавных диффузионных триодов | 1960 |
|
SU140914A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2619976C2 |
| RU 184662 U1, 02.11.2018 | |||
| US 20090189011 A1, 30.07.2009 | |||
| СОПЛО ГАЗОСТРУЙНОЙ СИСТЕМЫ УПРАВЛЕНИЯ ВЕРТОЛЕТА | 2015 |
|
RU2607687C1 |

