Область техники, к которой относится изобретение
Настоящее изобретение относится, но без ограничения, к области разведки и разработки месторождений нефти, относящейся к области способа электрического каротажа, в частности к способу и аппарату для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения и носителю данных.
Предпосылки изобретения
Азимутальный волновой электромагнитный каротаж в процессе бурения может обеспечивать информацию об азимуте напластования и широко применяется в геологической ориентации в скважинах с большим углом наклона (НА)/горизонтальных скважинах (HZ) и при оценке напластования в процессе бурения. Его информация об азимуте в основном обеспечивается конструкцией осевой ортогональной катушки, катушки с одним наклоном или катушки с двойным наклоном в приборе для азимутального волнового электромагнитного каротажа в процессе бурения. Когда прибор вращается в течение одного цикла, измеряемые сигналы конструкций осевой ортогональной катушки и катушки с одним наклоном могут быть выражены тригонометрической функцией первого порядка (три параметра), измеряемые сигналы конструкции катушки с двойным наклоном могут быть выражены тригонометрической функцией второго порядка (пять параметров), и азимутальные сигналы, анизотропные сигналы и т.п. могут быть получены путем обработки связанных параметров функций. Следовательно, точная подгонка измеряемых сигналов азимутального волнового электромагнитного каротажа в процессе бурения и извлечение связанных параметров имеют решающее значение для получения информации о напластовании.
В настоящее время способы подгонки для измеряемых сигналов конструкций осевой ортогональной катушки и катушки с одним наклоном в приборе для волнового электромагнитного каротажа в процессе бурения регулируются соответствующими отраслевыми стандартами, такими как стандарт IEEE 1057. Однако из-за новой конструкции системы катушки с двойным наклоном в приборе для азимутального волнового электромагнитного каротажа в процессе бурения способы подгонки его измеряемых сигналов не были раскрыты. Из-за многочисленных измерений прибором в один период и погрешностей дискретизации, если для решения параметров для подгонки используется простой способ неопределенных коэффициентов, будут получены множественные результаты решения. Если для решения параметров для подгонки используется итеративный способ аппроксимации, погрешности могут быть уменьшены, но его временная и пространственная сложность относительно высока.
Сущность изобретения
Ниже приводится изложение сущности объекта изобретения, подробно описанного в данном документе. Данное изложение сущности не предназначено для ограничения объема правовой охраны формулы изобретения.
В варианте осуществления настоящего изобретения предлагаются способ и аппарат для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения и носитель данных, которые могут обеспечивать извлечение геологического сигнала, анизотропного сигнала и т.п. системы катушки с двойным наклоном для азимутального волнового электромагнитного каротажа в процессе бурения.
В варианте осуществления настоящего изобретения предлагается способ обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения, включающий получение каротажного сигнала, собранного устройством для азимутального волнового электромагнитного каротажа в процессе бурения; определение параметра подгонки каротажного сигнала, принимая тригонометрическую функцию в качестве базисной функции согласно теории ортогональной функции; и определение информации о напластовании, соответствующей каротажному сигналу, согласно параметру подгонки, при этом информация о напластовании включает по меньшей мере одно из следующего: фазовый геологический сигнал, амплитудный геологический сигнал, фазовый анизотропный сигнал и амплитудный анизотропный сигнал; при этом устройство для азимутального волнового электромагнитного каротажа в процессе бурения представляет собой устройство с системой катушки с двойным наклоном.
В некоторых иллюстративных вариантах осуществления каротажный сигнал включает: секторные измерительные сигналы, собранные путем вращения системы катушки с двойным наклоном в устройстве для азимутального волнового электромагнитного каротажа в процессе бурения в течение одного цикла согласно предварительно установленному количеству раз дискретизации; и форма волны секторного измерительного сигнала представляет собой форму волны тригонометрической функции второго порядка со следующими характеристиками:

где ƒ(xn) представляет собой секторный измерительный сигнал, и представляет собой секторный угол, а0, a1, а2, a3 и а4 представляют собой параметры подгонки.
В некоторых иллюстративных вариантах осуществления определение параметра подгонки каротажного сигнала, принимая тригонометрическую функцию в качестве базисной функции согласно теории ортогональной функции, включает: установление того, равномерно ли дискретизирован каротажный сигнал; когда каротажный сигнал дискретизирован равномерно, согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определение параметра подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки равномерно дискретизированного сигнала; и, когда каротажный сигнал дискретизирован неравномерно, выполнение заполнения пустого сектора каротажного сигнала, и для заполненного сигнала согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определение параметра подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки равномерно дискретизированного сигнала; или согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определение параметра подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки неравномерно дискретизированного сигнала.
В некоторых иллюстративных вариантах осуществления согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определение параметра подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки неравномерно дискретизированного сигнала включает: выполнение накопительного суммирования каротажного сигнала, умножение каротажного сигнала на предварительно установленную тригонометрическую функцию и затем выполнение накопительного суммирования, и умножение двух предварительно установленных тригонометрических функций и выполнение накопительного суммирования; определение матрицы подгонки и первого вектора подгонки согласно результатам всех накопительных суммирований; при этом предварительно установленная тригонометрическая функция является одной или несколькими из следующих функций: cos xn, sin xn, cos 2xn и sin 2xn; соответственно, результатом накопительного суммирования после умножения каротажного сигнала на предварительно установленную тригонометрическую функцию является единица или более; и определения параметра подгонки согласно матрице подгонки и первому вектору подгонки.
В некоторых иллюстративных вариантах осуществления согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определение параметра подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки равномерно дискретизированного сигнала включает: выполнение операции усреднения в отношении каротажного сигнала для получения среднего значения, умножение каротажного сигнала на предварительно установленную тригонометрическую функцию и затем выполнение накопительного суммирования, выполнение накопительного суммирования в отношении квадрата предварительно установленной тригонометрической функции; определение второго вектора подгонки согласно среднему значению и результатам всех накопительных суммирований; при этом предварительно установленная тригонометрическая функция является одной или несколькими из следующих функций: cos xn, sin xn, cos2xn и sin2xn; соответственно, результатом накопительного суммирования после умножения каротажного сигнала на предварительно установленную тригонометрическую функцию является единица или более; и определение параметра подгонки согласно второму вектору подгонки.
В некоторых иллюстративных вариантах осуществления конструкция системы катушки с двойным наклоном содержит: передающие и приемные катушки, которые расположены не вдоль осевого направления прибора, а образуют определенный внутренний угол с осевым направлением соответственно; при этом осевое направление прибора включает три осевых направления трехмерной прямоугольной системы координат.
В некоторых иллюстративных вариантах осуществления выполнение заполнения пустого сектора каротажного сигнала включает: для каждого пустого сектора выполнение заполнения согласно одному из следующих режимов: определение данных о заполнении согласно каротажным сигналам секторов на двух сторонах пустого сектора и заполнение пустого сектора определенными данными о заполнении; и заполнение пустого сектора согласно соответствующему каротажному сигналу пустого сектора в предыдущий период измерения.
В некоторых иллюстративных вариантах осуществления форма волны секторного измерительного сигнала дополнительно имеет следующие характеристики:

при этом b0, b1, b2, ϕ1 и ϕ2 соответствуют следующим уравнениям: b0=a0, b1 cos ϕ1=a1, sin ϕ1=-а2, b2 cosϕ2=a3 и b2 sinϕ2=-а4, и
В варианте осуществления настоящего изобретения дополнительно предлагается электронный аппарат, содержащий запоминающее устройство и процессор, при этом в запоминающем устройстве хранится компьютерная программа для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения, и процессор выполнен с возможностью считывания и запуска компьютерной программы для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения для исполнения любого из вышеуказанных способов обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения.
В варианте осуществления настоящего изобретения дополнительно предлагается носитель данных, в котором хранится компьютерная программа, при этом компьютерная программа выполнена с возможностью выполнения любого из вышеуказанных способов обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения при запуске.
Другие аспекты станут очевидными после прочтения и понимания графических материалов и подробного описания.
Краткое описание графических материалов
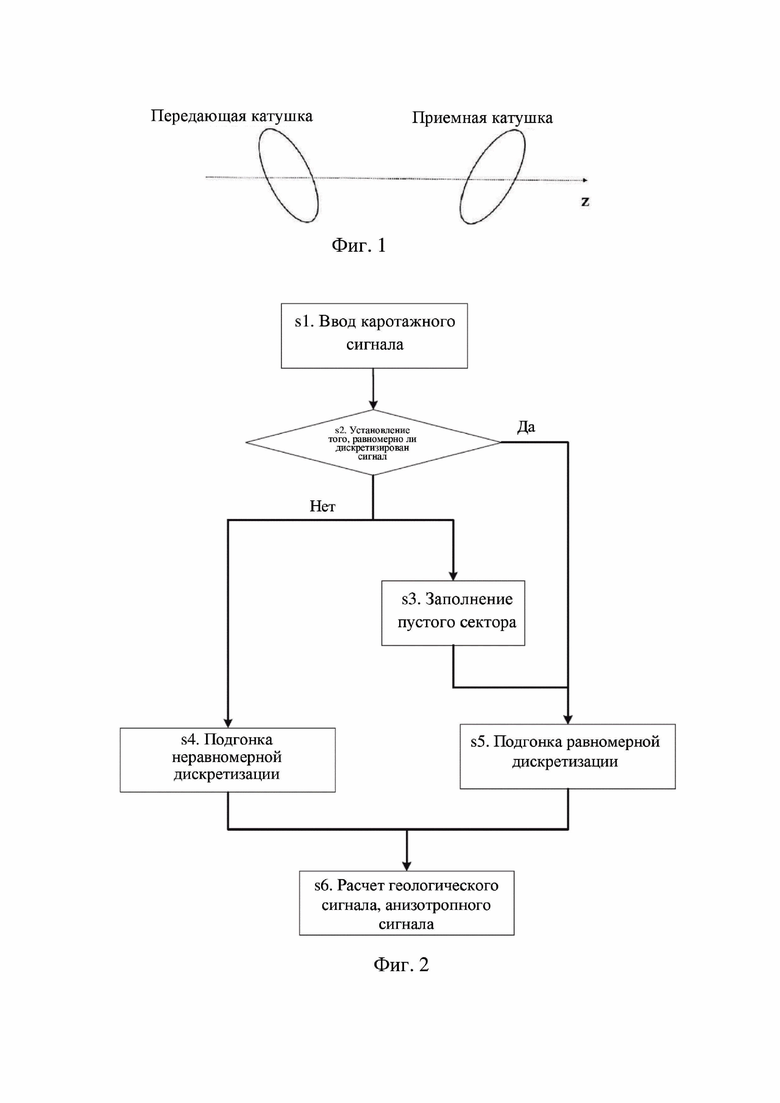
На фиг. 1 представлено схематическое изображение конструкции системы катушки с двойным наклоном в варианте осуществления настоящего изобретения.
На фиг. 2 представлена блок-схема способа обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения в варианте осуществления настоящего изобретения.
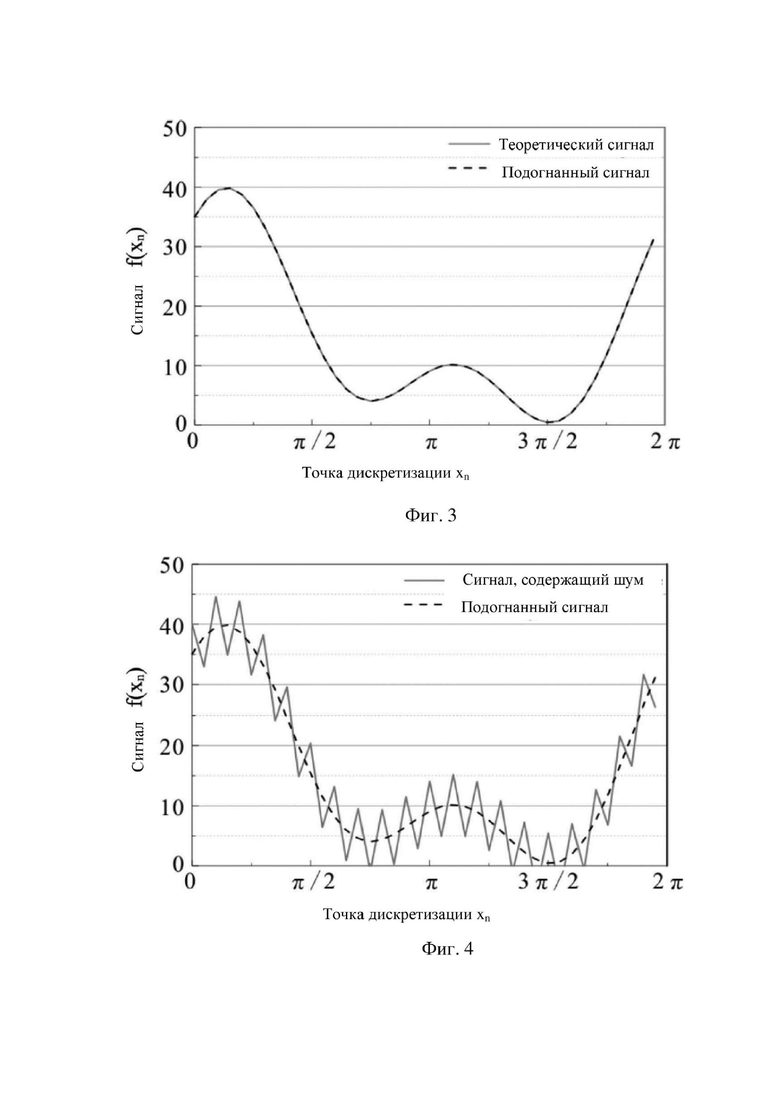
На фиг. 3 представлено схематическое изображение теории и подогнанных сигналов азимутального волнового электромагнитного каротажа в процессе бурения в один период в варианте осуществления настоящего изобретения.
На фиг. 4 представлено схематическое изображение сигнала, содержащего шум, и подогнанного сигнала азимутального волнового электромагнитного каротажа в процессе бурения в один период в варианте осуществления настоящего изобретения.
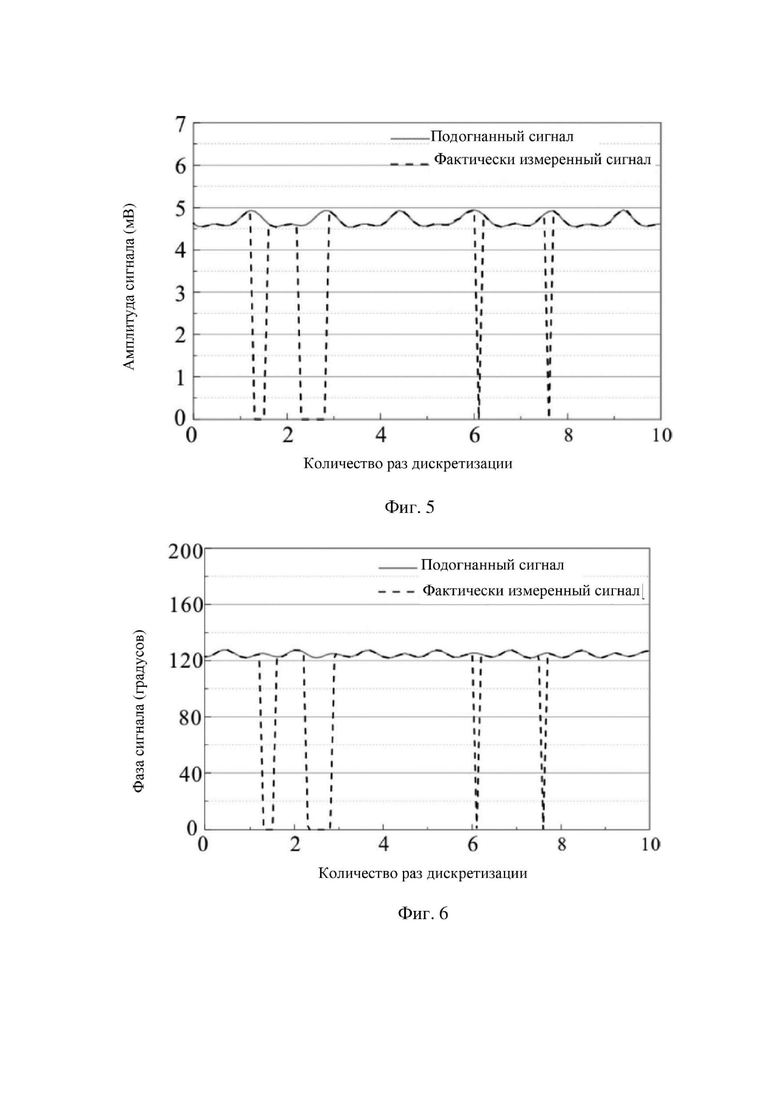
На фиг. 5 представлено схематическое изображение амплитуд фактически измеряемых и подогнанных сигналов в варианте осуществления настоящего изобретения.
На фиг. 6 представлено схематическое изображение фаз фактически измеряемых и подогнанных сигналов в варианте осуществления настоящего изобретения.
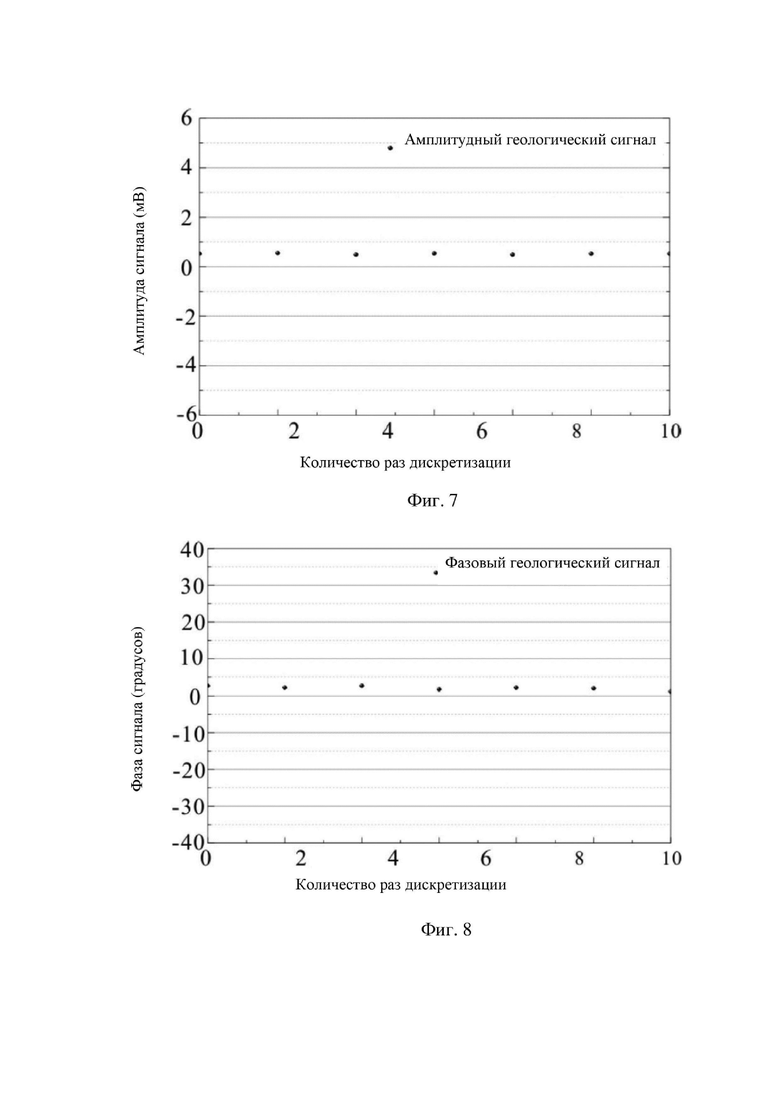
На фиг. 7 представлено схематическое изображение амплитудного геологического сигнала в варианте осуществления настоящего изобретения.
На фиг. 8 представлено схематическое изображение фазового геологического сигнала в варианте осуществления настоящего изобретения.
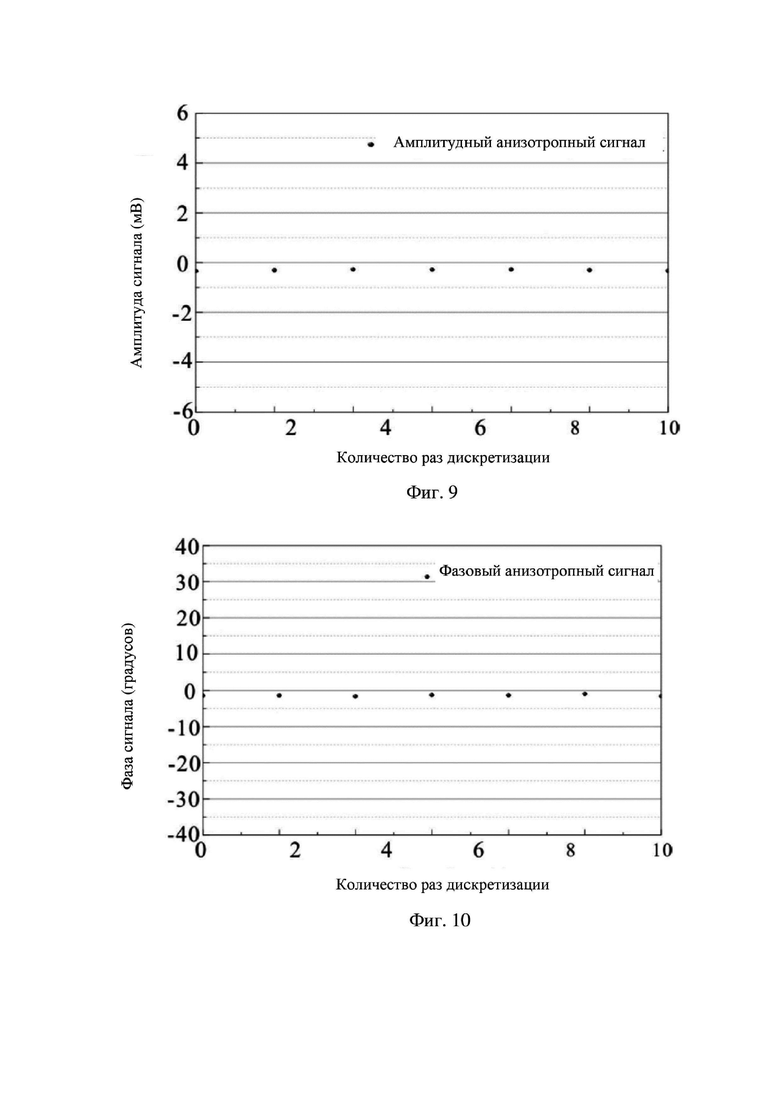
На фиг. 9 представлено схематическое изображение амплитудного анизотропного сигнала в варианте осуществления настоящего изобретения.
На фиг. 10 представлено схематическое изображение фазового анизотропного сигнала в варианте осуществления настоящего изобретения.
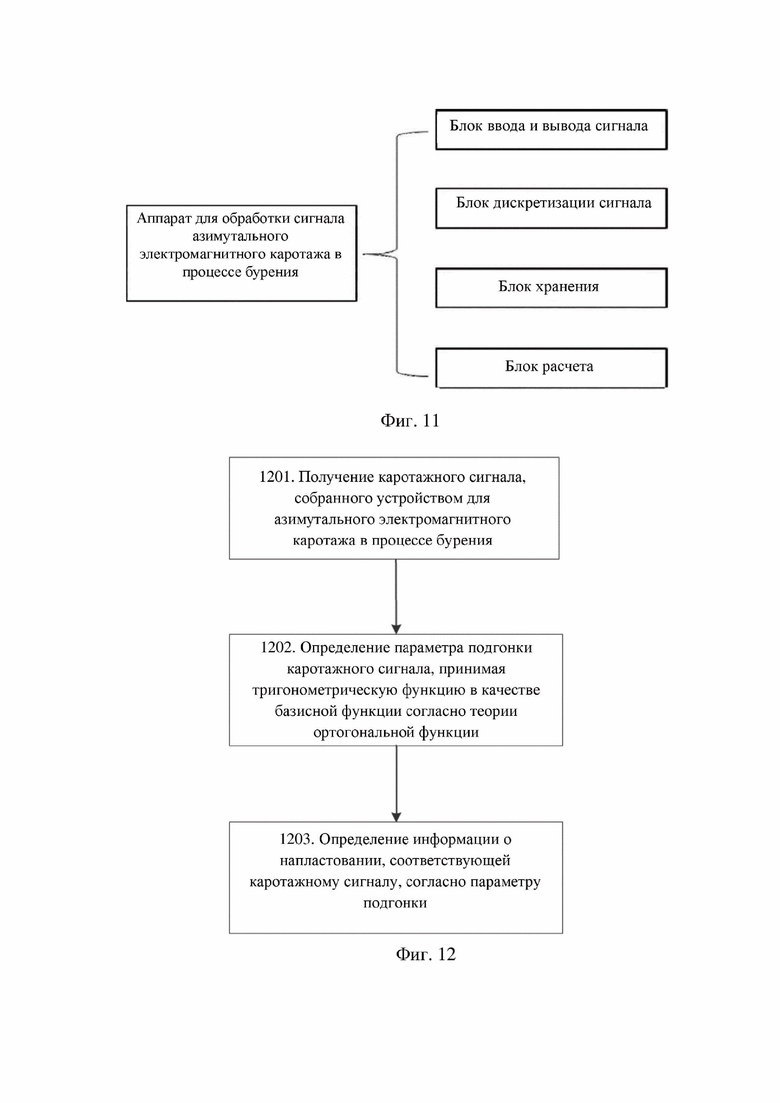
На фиг. 11 представлена схема конструкции аппарата для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения в варианте осуществления настоящего изобретения.
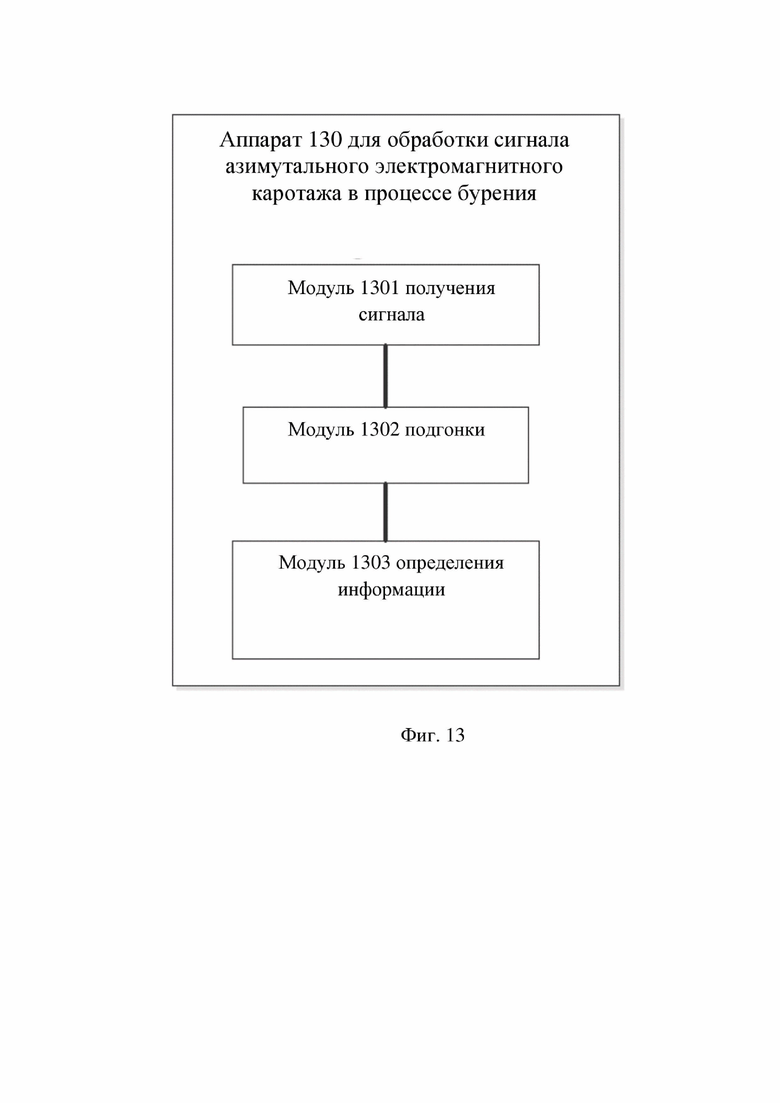
На фиг. 12 представлена блок-схема другого способа обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения в варианте осуществления настоящего изобретения.
На фиг. 13 представлена схема конструкции другого аппарата для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения в варианте осуществления настоящего изобретения.
Подробное описание
Чтобы сделать более понятными цель, технические решения и преимущества настоящего документа, ниже приводится более подробное описание настоящего документа в сочетании с прилагаемыми графическими материалами и вариантами осуществления. Варианты осуществления в настоящей заявке и признаки в вариантах осуществления могут быть объединены друг с другом в произвольном порядке, если они не противоречат друг другу.
Номера следующих действий не определяют конкретную последовательность исполнения, и последовательность исполнения может быть скорректирована для части действий согласно вариантам осуществления.
В варианте осуществления настоящего изобретения предлагается способ обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения. В сочетании с фиг. 1, в системе катушки передающая катушка образует произвольный внутренний угол (не вдоль осевого направления) с осевым направлением прибора (ось х, ось у, ось z), и приемная катушка также образует произвольный внутренний угол (не вдоль осевого направления) с осевым направлением прибора. В некоторых иллюстративных вариантах осуществления для систем катушки T1-R3 и T2-R4, описанных в типичном примере, таком как патент под названием «Multicomponent Azimuth Electromagnetic Wave Resistivity Imaging While Drilling Instrument» (CN104929622A), передающая и приемная катушки образуют -45 градусов и 45 градусов с осевым направлением утяжеленной бурильной трубы соответственно.
Способ обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения, как показано на фиг. 2, включает следующие действия.
В действии s1 вводят секторный измерительный сигнал ƒ(xn) и секторный угол xn, когда система катушки с двойным наклоном в приборе для азимутального волнового электромагнитного каротажа в процессе бурения вращается в течение одного цикла. Как показано сплошной линией в виде формы волны на фиг. 3, форма волны представлена как:

где a0, a1, а2, a3 и a4 являются параметрами для подгонки, то есть параметрами подгонки, которые связаны с компонентом электромагнитного поля.
В действии s2 устанавливают, равномерно ли дискретизирован каротажный сигнал, если каротажный сигнал дискретизирован неравномерно, выполняют действие s3 или s4; и, если каротажный сигнал дискретизирован равномерно, выполняют действие s5. В настоящем варианте осуществления каротажный сигнал дискретизирован равномерно, поэтому выполняют действие s5.
В действии s6 согласно параметру подгонки, определенному в действии s5, определяют информацию о напластовании, соответствующую каротажному сигналу; информация о напластовании включает по меньшей мере одно из следующего: фазовый геологический сигнал, амплитудный геологический сигнал, фазовый анизотропный сигнал и амплитудный анизотропный сигнал.
В данном документе, когда определено, что каротажный сигнал не является равномерно дискретизированным сигналом, могут быть выбраны два решения: 1) после выполнения действия S3 для заполнения пустого сектора выполняют действие s5; и 2) выполняют действие s4, то есть параметр подгонки определяют путем использования предварительно установленного алгоритма подгонки неравномерно дискретизированного сигнала, а затем выполняют действие s6.
В некоторых иллюстративных вариантах осуществления устанавливают, является ли каротажный сигнал равномерно дискретизированным сигналом, что включает следующее: если в секторе имеется нулевое значение, определяют, что дискретизированный сигнал является неравномерным; и, если нет нулевого значения, определяют, что дискретизированный сигнал является равномерным. Обычно предварительно установленные секторные углы прибора для каротажа в процессе бурения являются равномерными, так что, поскольку сектор каждой измеряемой точки заполнен, это считается равномерной дискретизацией, в противном случае - неравномерной дискретизацией.
В некоторых иллюстративных вариантах осуществления действие s4 может включать: согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, получение параметра подгонки неравномерно дискретизированного сигнала. Согласно теории ортогональной функции, это может относиться к следующему: выполнение обработки на основании формулы расчета, разработанной согласно теории ортогональной функции.
В некоторых иллюстративных вариантах осуществления действие s4 может включать следующие действия: s4.1-s4.7.
В действии s4.1 в отношении каротажного сигнала выполняют накопительное суммирование, в этом случае левая часть формулы (1) может быть записана как  , ее правая часть может быть записана как:
, ее правая часть может быть записана как:

В действии s4.2 накопительное суммирование выполняют в отношении произведения умножения каротажного сигнала на тригонометрическую функцию cosxn, в этом случае левая часть формулы (1) представляет собой  , а ее правая часть может быть записана как:
, а ее правая часть может быть записана как:

В действии s4.3 накопительное суммирование выполняют в отношении произведения умножения каротажного сигнала на тригонометрическую функцию sinxn, в этом случае левая часть формулы (1) представляет собой  , а ее правая часть может быть записана как:
, а ее правая часть может быть записана как:

В действии s4.4 накопительное суммирование выполняют в отношении произведения умножения каротажного сигнала на тригонометрическую функцию cos2xn, в этом случае левая часть формулы (1) представляет собой  , а ее правая часть может быть записана как:
, а ее правая часть может быть записана как:

В действии s4.5 накопительное суммирование выполняют в отношении произведения умножения каротажного сигнала на тригонометрическую функцию и, в этом случае левая часть формулы (1) представляет собой  , а ее правая часть может быть записана как:
, а ее правая часть может быть записана как:

В данном документе значение N представляет количество значений дискретизации в каждой подгонке, то есть количество входных значений в одной подгонке. Для равномерной дискретизации (без нулевого значения) значение N равно количеству точек дискретизации в один период, а для неравномерной дискретизации (с нулевым значением) значение N равно количеству точек дискретизации в один период минус количество нулевых значений. В действии S4 значение N равно количеству точек дискретизации в один период минус количество нулевых значений.
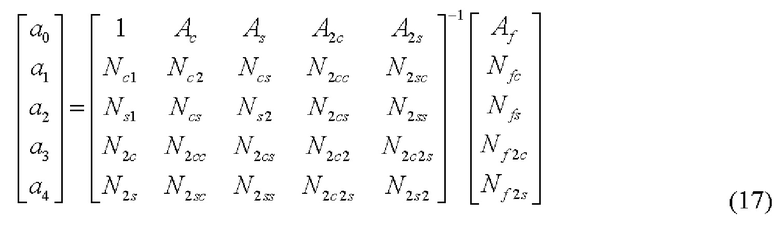
В действии s4.6 рассчитывают параметры а0, a1, a2, a3 и a4 для подгонки. Используя следующие формулы:










Может быть получена следующая формула:
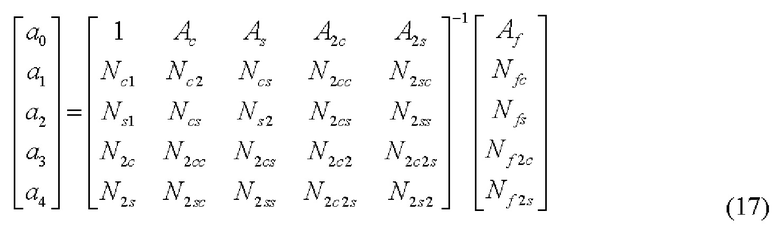
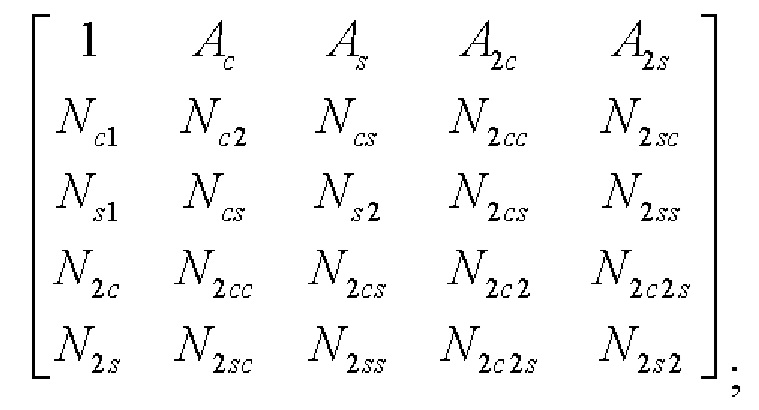
То есть параметр подгонки  определяется согласно матрице подгонки Т и первому вектору подгонки М; при этом матрица подгонки Т представляет собой
определяется согласно матрице подгонки Т и первому вектору подгонки М; при этом матрица подгонки Т представляет собой
Первый вектор подгонки М представляет собой
Таким образом, параметр подгонки А=Т-1 М.
В некоторых иллюстративных вариантах осуществления действие s4 дополнительно включает действие s4.7 для получения подогнанного сигнала; и после действия s4.7 выполняют действие s6.
В некоторых иллюстративных вариантах осуществления действие s4.7 включает: после получения соответствующей формулы подгонки согласно параметру подгонки секторный угол вводят в формулу подгонки (например, формулу (1)), и путем расчета получают подогнанную форму волны, которая называется подогнанным сигналом. Целью расчета и сохранения подогнанного сигнала здесь является сравнение и тестирование эффекта подгонки в реальном процессе обработки данных и обеспечение руководства для анализа причин погрешностей дискретизации, нулевых значений и тому подобного.
В некоторых иллюстративных вариантах осуществления действие s6 больше не выполняется, когда подогнанный сигнал является сигналом одного периода.
В некоторых иллюстративных вариантах осуществления в действии s5 согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, получение параметра подгонки равномерно дискретизированного сигнала включает следующие действия: s5.1 s5.8.
В действии s5.1 каротажный сигнал усредняют для получения 
В действии s5.2 выполняют накопительное суммирование в отношении произведения умножения каротажного сигнала на тригонометрическую функцию cosxn для получения  .
.
В действии s5.3 накопительное суммирование выполняют в отношении произведения умножения каротажного сигнала на тригонометрическую функцию sinxn для получения 
В действии s5.4 накопительное суммирование выполняют в отношении произведения умножения каротажного сигнала на тригонометрическую функцию cos2xn для получения  .
.
В действии s5.5 выполняют накопительное суммирование в отношении произведения умножения каротажного сигнала на тригонометрическую функцию sin2x для получения  .
.
В действии s5.6 рассчитывают квадратичные слагаемые:  ,
,  .
.
В данном документе значение N представляет количество значений дискретизации в каждой подгонке, то есть количество входных значений в одной подгонке. Для равномерной дискретизации (без нулевого значения) значение N равно количеству точек дискретизации в один период, а для неравномерной дискретизации (с нулевым значением) значение N равно количеству точек дискретизации в один период минус количество нулевых значений. В действии S5 значение N равно количеству точек дискретизации в один период.
В некоторых иллюстративных вариантах осуществления действие s5.6 дополнительно включает: определение второго вектора подгонки  .
.
В действии s5.7 получают параметры для подгонки:  ,
, 
В некоторых иллюстративных вариантах осуществления действие s5 дополнительно включает действие s5.8, т.е. получают подогнанный сигнал, соответствующий параметру подгонки, и после действия s5.8 выполняют действие s6.
В некоторых иллюстративных вариантах осуществления действие s5.8 включает: после получения соответствующей формулы подгонки согласно параметру подгонки секторный угол вводят в формулу подгонки (например, формулу (1)), и путем расчета получают подогнанную форму волны, которая называется подогнанным сигналом. Целью расчета и сохранения подогнанного сигнала здесь является сравнение и тестирование эффекта подгонки в реальном процессе обработки данных и обеспечение руководства для анализа причин погрешностей дискретизации, нулевых значений и тому подобного.
В некоторых иллюстративных вариантах осуществления полученный подогнанный сигнал показан пунктирной линией в виде формы волны на фиг. 4.
В некоторых иллюстративных вариантах осуществления действие s6 больше не выполняется, когда подогнанный сигнал является сигналом одного периода.
В некоторых иллюстративных вариантах осуществления сигнал, содержащий шум, такой как форма волны, показанная сплошной линией на фиг. 5, обрабатывают посредством тех же самых действий, и может быть получен подогнанный сигнал, такой как форма волны, показанная пунктирной линией на фиг. 5. Легко увидеть, что способ обладает превосходным эффектом подавления шума.
В некоторых иллюстративных вариантах осуществления действие s6 включает: расчет геологического сигнала и анизотропного сигнала следующим образом:




В некоторых иллюстративных вариантах осуществления действие s3 включает один из следующих режимов.
Первым решением является интерполяционный подход, то есть для каждого пустого сектора, используя данные каротажного сигнала секторов на двух сторонах пустого сектора, пустой сектор заполняется с помощью интерполяционного подхода.
Вторым решением является подход наследования, то есть для каждого пустого сектора каротажный сигнал текущего пустого сектора заполняется каротажным сигналом сектора за предыдущий период с использованием данных измерения последнего вращения (каротажным сигналом пустого сектора в предыдущий период измерения), то есть нулевое значение сектора в текущем периоде заполняется измеренным значением в предыдущий период в подходе наследования.
В некоторых иллюстративных вариантах осуществления конструкция системы катушки с двойным наклоном в приборе для азимутального волнового электромагнитного каротажа в процессе бурения является следующей: передающая и приемная катушки расположены не вдоль направления оси прибора (оси х, оси у, оси z), но они образуют определенный внутренний угол с направлением оси соответственно.
В некоторых иллюстративных вариантах осуществления форма волны измерительного сигнала конструкции системы катушки с двойным наклоном в действии s1 может быть: формой волны тригонометрической функции второго порядка, такой как формула (1), или ее математическим вариантом, таким как:

В данном документе параметры b0, b1, b2, ϕ1 и ϕ2 и параметры подгонки в формуле (1) a0, a1, a2, a3 и a4 имеют следующие уравнения: 

Соответственно, согласно вышеуказанным уравнениям между параметрами, описанными выше, и согласно действиям s2-s5, технический персонал в данной области соответственно выполняет эквивалентное изменение формы, выполняет подгонку для получения параметров а0, a1, a2, а3 и а4, и после этого дополнительно определяют параметры b0, b1, b2, ϕ1 и ϕ2. Другие сигналы все еще могут быть определены соответствующим образом согласно действию s6.
Способ обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения согласно варианту осуществления настоящего изобретения может выполняться компьютером.
В варианте осуществления настоящего изобретения дополнительно предлагается аппарат для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения, показанный на фиг. 11, содержащий: блок ввода и вывода сигнала, выполненный с возможностью ввода исходного сигнала (т.е. исходного каротажного сигнала, генерируемого прибором для азимутального волнового электромагнитного каротажа в процессе бурения) и вывода подогнанного сигнала; блок дискретизации сигнала, выполненный с возможностью выполнения дискретизации сигнала; блок хранения, выполненный с возможностью хранения постоянной и переменной в процессе решения; и блок расчета, выполненный с возможностью расчета формулы подгонки, геологического сигнала и анизотропного сигнала.
В некоторых иллюстративных вариантах осуществления процесс обработки сигнала в аппарате может быть следующим.
В s11 амплитуда и фаза фактически измеренного сигнала (каротажного сигнала) системы катушки с двойным наклоном в приборе для азимутального волнового электромагнитного каротажа в процессе бурения дискретизирован под скважиной блоком дискретизации сигнала, как показано пунктирной линией в виде форме волны на фиг. 6 и фиг. 7.
В s21 устанавливают, равномерно ли дискретизирован сигнал, если дискретизированный сигнал является неравномерным, выполняют действие s31 или s41; и, если дискретизированный сигнал является равномерным, выполняют действие s51. Иллюстративный сигнал в некоторых периодах представляет собой равномерно дискретизированный сигнал, и выполняют действие s51; и сигнал в некоторых периодах содержит пустой сектор, и выполняют действие s31.
Когда установлено, что каротажный сигнал не является равномерно дискретизированным сигналом, могут быть выбраны два решения: 1) после выполнения действия s31, то есть заполнения пустого сектора, выполняют действие s51; и 2) выполняют действие s41, то есть параметр подгонки определяют путем использования предварительно установленного алгоритма подгонки неравномерно дискретизированного сигнала, а затем выполняют действие s61. Здесь в действии s31 принято решение о заполнении пустого сектора способом наследования, поэтому действие s51 выполняют после заполнения.
В s51 согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, получают параметр подгонки равномерно дискретизированного сигнала. Здесь квадратичное слагаемое представляет собой постоянное слагаемое, которое рассчитывается заранее и хранится в блоке хранения. Полученный подогнанный сигнал показан сплошной линией в виде формы волны на фиг. 5 и фиг. 6.
В s61 геологический сигнал и анизотропный сигнал рассчитываются согласно параметру подгонки (подогнанному сигналу):




В некоторых иллюстративных вариантах осуществления блок дискретизации сигнала выполнен с возможностью выполнения дискретизации сигнала, когда прибор вращается в течение одного цикла, при этом количество N дискретизаций за один период представляет собой постоянную, а соответствующий угол дискретизации за один период xn является фиксированным значением; N представляет собой целое число больше 0, и xn больше или равно 0 градусам и меньше или равно 360 градусам.
В некоторых иллюстративных вариантах осуществления постоянная, хранящаяся в блоке хранения, может быть:
В некоторых иллюстративных вариантах осуществления, когда в s21 установлено, что дискретизированный сигнал дискретизирован неравномерно, выполняют действие s31 для заполнения; после заполнения дискретизированный сигнал становится равномерно дискретизированным сигналом, и хранящаяся постоянная включает: Nc2, Ns2, N2c2, N2s2.
В некоторых иллюстративных вариантах осуществления блок расчета коэффициента подгонки рассчитывает параметр подгонки, также называемый коэффициентом формулы подгонки, измерительного сигнала в конструкции катушки с двойным наклоном согласно значению дискретизации сигнала; и блок расчета сигнала рассчитывает геологический сигнал, анизотропный сигнал и т.д. согласно параметру подгонки.
В некоторых иллюстративных вариантах осуществления амплитудный геологический сигнал, фазовый геологический сигнал, амплитудный анизотропный сигнал и фазовый анизотропный сигнал, которые получены путем расчета, показаны на фиг. 7, 8, 9 и 10 соответственно. Легко увидеть, что аппарат имеет простую конструкцию, характеризуется легкой реализацией способа обработки и небольшим объемом расчетов и подходит для измерительной среды под скважиной.
В некоторых иллюстративных вариантах осуществления, когда в s21 установлено, что дискретизированный сигнал дискретизирован неравномерно, выполняют действие s41, то есть параметр подгонки определяют путем использования предварительно установленного алгоритма подгонки неравномерно дискретизированного сигнала без выполнения заполнения.
В некоторых иллюстративных вариантах осуществления пустой сектор также может быть заполнен путем применения интерполяционного подхода в действии s31.
В некоторых иллюстративных вариантах осуществления действия s21 s61 выполняются со ссылкой на аспекты, соответствующие действиям s2-s6 во втором варианте осуществления, и здесь не повторяются.
Вкратце, теоретическим расчетом доказано, что формула подгонки, полученная с помощью способа обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения, является точной, полученный подогнанный сигнал в высокой степени соответствует исходному сигналу, и шум также может быть подавлен; фактически измеренный сигнал доказывает, что аппарат для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения является простым и легким с точки зрения конструкции, рациональным, простым и эффективным в процессе обработки фактического сигнала, обладает хорошим эффектом обработки сигнала и соответствует характеристикам исходного сигнала.
Можно видеть, что способ, описанный в данном документе, является явно аналитическим способом, и его временная и пространственная сложность невелика; кроме того, процесс решения основан на теории ортогональной функции, соответствует принципу наименьших квадратов и может свести к минимуму погрешности.
В варианте осуществления настоящего изобретения также предлагается способ обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения, технологическая последовательность которого показана на фиг. 12 и который включает следующие действия: 1201-1203.
В действии 1201 получают каротажный сигнал, собранный устройством для азимутального волнового электромагнитного каротажа в процессе бурения.
В действии 1202 определяют параметр подгонки каротажного сигнала, принимая тригонометрическую функцию в качестве базисной функции согласно теории ортогональной функции.
В действии 1203 согласно параметру подгонки определяют информацию о напластовании, соответствующую каротажному сигналу, при этом информация о напластовании включает по меньшей мере одно из следующего: фазовый геологический сигнал, амплитудный геологический сигнал, фазовый анизотропный сигнал и амплитудный анизотропный сигнал.
В данном документе устройство для азимутального волнового электромагнитного каротажа в процессе бурения представляет собой устройство с системой катушки с двойным наклоном.
В некоторых иллюстративных вариантах осуществления каротажный сигнал включает: секторные измерительные сигналы, собранные путем вращения системы катушки с двойным наклоном в устройстве для азимутального волнового электромагнитного каротажа в процессе бурения в течение одного цикла согласно предварительно установленному количеству раз дискретизации; и форма волны секторного измерительного сигнала представляет собой форму волны тригонометрической функции второго порядка со следующими характеристиками:

где ƒ(xn) представляет собой секторный измерительный сигнал, xn представляет собой секторный угол, а0, a1, а2, a3 и а4 представляют собой параметры подгонки.
В некоторых иллюстративных вариантах осуществления параметр подгонки каротажного сигнала определяют путем принятия тригонометрической функции в качестве базисной функции согласно теории ортогональной функции, что включает следующее: устанавливают, равномерно ли дискретизирован каротажный сигнал; когда каротажный сигнал дискретизирован равномерно, согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, параметр подгонки каротажного сигнала определяют путем использования предварительно установленного алгоритма подгонки равномерно дискретизированного сигнала; и, когда каротажный сигнал дискретизирован неравномерно, выполняют заполнение пустого сектора каротажного сигнала, и для заполненного сигнала согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определяют параметр подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки равномерно дискретизированного сигнала; или согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определяют параметр подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки неравномерно дискретизированного сигнала.
В некоторых иллюстративных вариантах осуществления согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определяют параметр подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки неравномерно дискретизированного сигнала, что включает следующее: в отношении каротажного сигнала выполняют накопительное суммирование, каротажный сигнал умножают на предварительно установленную тригонометрическую функцию и затем выполняют накопительное суммирование, и умножают две предварительно установленные тригонометрические функции и затем выполняют накопительное суммирование; определяют матрицу подгонки и первый вектор подгонки согласно результатам всех накопительных суммирований; при этом предварительно установленная тригонометрическая функция является одной или несколькими из следующих функций: cosxn, sinxn, cos2xn, sin2xn; соответственно, результатом накопительного суммирования после умножения каротажного сигнала на предварительно установленную тригонометрическую функцию является единица или более; и параметр подгонки определяют согласно матрице подгонки и первому вектору подгонки.
В некоторых иллюстративных вариантах осуществления согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, получают параметр подгонки неравномерно дискретизированного сигнала, что включает следующее: в отношении каротажного сигнала выполняют накопительное суммирование, левая часть формулы (1) может быть записана как  , а ее правая часть может быть записана как:
, а ее правая часть может быть записана как:

Накопительное суммирование выполняют в отношении произведения умножения каротажного сигнала на тригонометрическую функцию cosxn, в этом случае левая часть формулы (1) представляет собой  , а ее правая часть может быть записана как:
, а ее правая часть может быть записана как:

Накопительное суммирование выполняют в отношении произведения умножения каротажного сигнала на тригонометрическую функцию ", в этом случае левая часть формулы (1) представляет собой n=1, а ее правая часть может быть записана как:

Накопительное суммирование выполняют в отношении произведения умножения каротажного сигнала на тригонометрическую функцию cos2xn, в этом случае левая часть формулы (1) представляет собой  , а ее правая часть может быть записана как:
, а ее правая часть может быть записана как:

Накопительное суммирование выполняют в отношении произведения умножения каротажного сигнала на тригонометрическую функцию sin2xn, в этом случае левая часть формулы (1) представляет собой  , а ее правая часть может быть записана как:
, а ее правая часть может быть записана как:

В данном документе значение N представляет количество значений дискретизации в каждой подгонке, то есть количество входных значений в одной подгонке. Для равномерной дискретизации (без нулевого значения) значение N равно количеству точек дискретизации в один период, а для неравномерной дискретизации (с нулевым значением) значение N равно количеству точек дискретизации в один период минус количество нулевых значений. В процессе подгонки неравномерно дискретизированного сигнала значение N равно количеству точек дискретизации в один период минус количество нулевых значений.
Рассчитывают параметры а0, a1, a2, a3 и a4 для подгонки. Используя следующие формулы:









Может быть получена следующая формула:
To есть параметр подгонки определяют согласно матрице подгонки Т и первому вектору подгонки М; при этом матрица подгонки Т представляет собой
первый вектор подгонки М представляет собой

Таким образом, параметр подгонки А=Т-1 М.
В некоторых иллюстративных вариантах осуществления согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определяют параметр подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки равномерно дискретизированного сигнала, что включает следующее: выполняют операцию усреднения в отношении каротажного сигнала для получения среднего значения, умножают каротажный сигнал на предварительно установленную тригонометрическую функцию и затем выполняют накопительное суммирование, выполняют накопительное суммирование в отношении квадрата предварительно установленной тригонометрической функции; определяют второй вектор подгонки согласно среднему значению и результатам всех накопительных суммирований; при этом предварительно установленная тригонометрическая функция является одной или несколькими из следующих функций: cos xn, sin xn, cos2xn и sin2xn; соответственно, результатом накопительного суммирования после умножения каротажного сигнала на предварительно установленную тригонометрическую функцию является единица или более; и параметр подгонки определяют согласно второму вектору подгонки.
В некоторых иллюстративных вариантах осуществления согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определяют параметр подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки равномерно дискретизированного сигнала, что включает следующее:
каротажный сигнал усредняют для получения: 
выполняют накопительное суммирование в отношении произведения умножения каротажного сигнала на тригонометрическую функцию cosxn для получения: 
выполняют накопительное суммирование в отношении произведения умножения каротажного сигнала на тригонометрическую функцию sinxn для получения: 
выполняют накопительное суммирование в отношении произведения умножения каротажного сигнала на тригонометрическую функцию cos2xn для получения: 
выполняют накопительное суммирование в отношении произведения умножения каротажного сигнала на тригонометрическую функцию для получения: 
рассчитывают квадратичные слагаемые: 
В данном документе значение N представляет количество значений дискретизации в каждой подгонке, то есть количество входных значений в одной подгонке. Для равномерной дискретизации (без нулевого значения) значение N равно количеству точек дискретизации в один период, а для неравномерной дискретизации (с нулевым значением) значение N равно количеству точек дискретизации в один период минус количество нулевых значений. В процессе подгонки равномерно дискретизированного сигнала значение N равно количеству точек дискретизации в один период.
Определяют второй вектор подгонки
Согласно второму вектору подгонки Q получают параметры для подгонки, включающие:  .
.
В некоторых иллюстративных вариантах осуществления конструкция системы катушки с двойным наклоном содержит: передающие и приемные катушки, которые расположены не вдоль осевого направления прибора, но соответственно образуют определенный внутренний угол с осевым направлением; при этом осевое направление прибора включает три осевых направления трехмерной прямоугольной системы координат.
В некоторых иллюстративных вариантах осуществления заполнение выполняют для пустого сектора каротажного сигнала, что включает: для каждого пустого сектора выполнение заполнения согласно одному из следующих режимов: определение данных о заполнении согласно каротажным сигналам секторов на двух сторонах пустого сектора и заполнение пустого сектора определенными данными о заполнении; и заполнение пустого сектора согласно соответствующему каротажному сигналу пустого сектора в предыдущий период измерения.
В некоторых иллюстративных вариантах осуществления форма волны секторного измерительного сигнала также имеет следующие характеристики:

где b0, b1, b2, ϕ1 и ϕ2 соответствуют следующим уравнениям: 

В варианте осуществления настоящего изобретения также предлагается аппарат 130 для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения, конструкция которого показана на фиг. 13 и который содержит: модуль 1301 получения сигнала, модуль 1302 подгонки и модуль 1303 определения информации.
Модуль 1301 получения сигнала выполнен с возможностью получения каротажного сигнала, собранного устройством для азимутального волнового электромагнитного каротажа в процессе бурения.
Модуль 1302 подгонки выполнен с возможностью определения параметра подгонки каротажного сигнала согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции.
Модуль 1303 определения информации выполнен с возможностью определения информации о напластовании, соответствующей каротажному сигналу, согласно параметру подгонки, при этом информация о напластовании включает по меньшей мере одно из следующего: фазовый геологический сигнал, амплитудный геологический сигнал, фазовый анизотропный сигнал и амплитудный анизотропный сигнал.
В данном документе устройство для азимутального волнового электромагнитного каротажа в процессе бурения представляет собой устройство с системой катушки с двойным наклоном.
В варианте осуществления настоящего изобретения дополнительно предлагается электронный аппарат, содержащий запоминающее устройство и процессор, при этом в запоминающем устройстве хранится компьютерная программа для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения, и процессор выполнен с возможностью считывания и запуска компьютерной программы для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения для выполнения любого из вышеуказанных способов обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения.
В варианте осуществления настоящего изобретения дополнительно предлагается носитель данных, в котором хранится компьютерная программа, при этом компьютерная программа выполнена с возможностью выполнения любого из вышеуказанных способов обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения при запуске.
Специалистам в данной области техники понятно, что все или некоторые действия в раскрытых выше способах, системах, функциональных модулях/блоках в аппаратах могут быть реализованы как программное обеспечение, программно-аппаратное обеспечение, аппаратное обеспечение и их соответствующие комбинации. В вариантах осуществления аппаратного обеспечения разделение между функциональными модулями/блоками, упомянутыми в приведенном выше описании, не обязательно соответствует разделению физических компонентов; например, физический компонент может иметь множество функций, или функция или действие могут выполняться совместно несколькими физическими компонентами. Некоторые или все компоненты могут быть реализованы как программное обеспечение, исполняемое процессором, таким как процессор цифровой обработки сигналов или микропроцессор, или как аппаратное обеспечение, или как интегральная схема, например специализированная интегральная схема. Такое программное обеспечение может распространяться на машиночитаемом носителе данных, который может включать компьютерный носитель данных (или постоянный носитель) и среду передачи данных (или временный носитель). Как хорошо известно специалистам в данной области техники, термин «компьютерный носитель данных» включает энергозависимые и энергонезависимые, съемные и несъемные носители, реализованные любым способом или методом хранения информации, такой как машиночитаемые команды, структуры данных, программные модули или другие данные. Компьютерные носители данных включают, но без ограничения, RAM, ROM, EEPROM, флэш-память или другую технологию памяти, CD-ROM, универсальный цифровой диск (DVD), или другой накопитель на оптических дисках, магнитный картридж, магнитную ленту, накопитель на магнитных дисках, или другое магнитное устройство для хранения, или любой другой носитель, который может быть выполнен с возможностью хранения необходимой информации и к которому можно получить доступ с помощью компьютера. Кроме того, специалистам в данной области техники хорошо известно, что среда передачи данных обычно содержит машиночитаемые команды, структуры данных, программные модули или другие данные в модулированных сигналах данных, таких как несущие волны или другой механизм передачи, и может включать любое средство доставки информации.
Изобретение относится к области разведки месторождений нефти, а именно к электрическому каротажу. Сущность: способ включает получение каротажного сигнала, собранного устройством для азимутального волнового электромагнитного каротажа в процессе бурения, определение параметра подгонки каротажного сигнала, принимая тригонометрическую функцию в качестве базисной функции, и определение согласно параметру подгонки информации о напластовании, соответствующей каротажному сигналу. Информация о напластовании включает по меньшей мере одно из следующего: фазовый геологический сигнал, амплитудный геологический сигнал, фазовый анизотропный сигнал и амплитудный анизотропный сигнал. Устройство для азимутального волнового электромагнитного каротажа в процессе бурения представляет собой устройство с катушкой с двойным наклоном. Технический результат: обеспечение возможности заполнения пустого сектора каротажного сигнала. 3 н. и 5 з.п. ф-лы, 13 ил.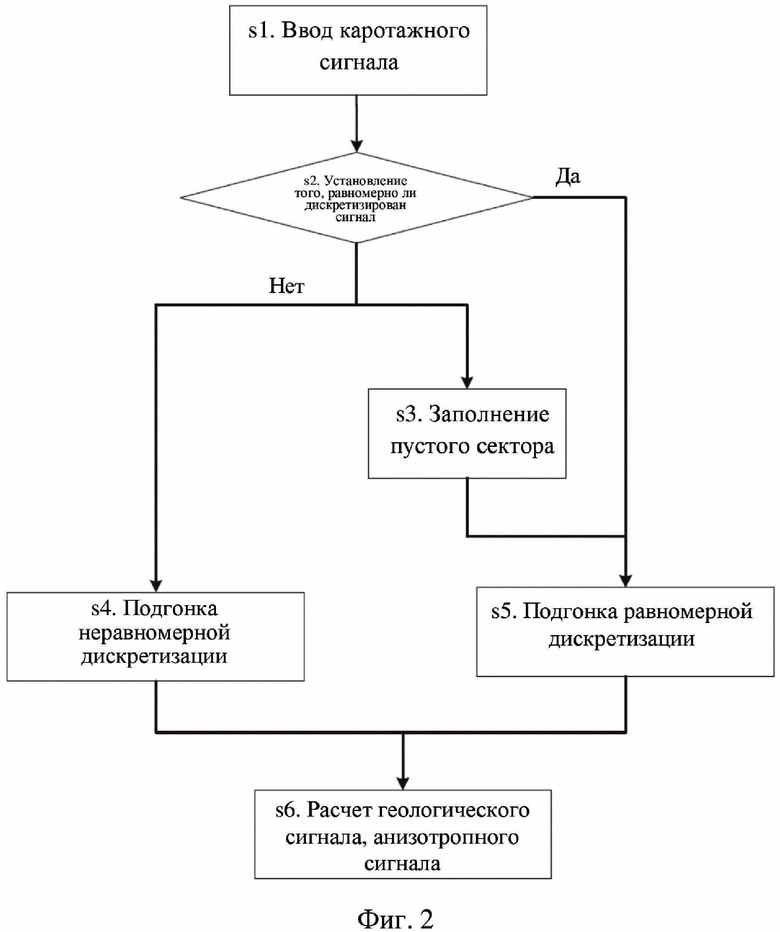
1. Способ обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения, включающий:
получение каротажного сигнала, собранного устройством для азимутального волнового электромагнитного каротажа в процессе бурения;
определение параметра подгонки каротажного сигнала, принимая тригонометрическую функцию в качестве базисной функции, согласно теории ортогональной функции; и
определение информации о напластовании, соответствующей каротажному сигналу, согласно параметру подгонки, при этом информация о напластовании включает по меньшей мере одно из следующего: фазовый геологический сигнал, амплитудный геологический сигнал, фазовый анизотропный сигнал и амплитудный анизотропный сигнал;
при этом устройство для азимутального волнового электромагнитного каротажа в процессе бурения представляет собой устройство с системой катушки с двойным наклоном;
каротажный сигнал включает: секторные измерительные сигналы, собранные путем вращения системы катушки с двойным наклоном в устройстве для азимутального волнового электромагнитного каротажа в процессе бурения в течение одного цикла согласно предварительно установленному количеству раз дискретизации;
форма волны секторного измерительного сигнала представляет собой форму волны тригонометрической функции второго порядка со следующими характеристиками:

где 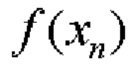 представляет собой секторный измерительный сигнал,
представляет собой секторный измерительный сигнал,  представляет собой секторный угол,
представляет собой секторный угол,  и
и  представляют собой параметры подгонки; определение параметра подгонки каротажного сигнала, принимая тригонометрическую функцию в качестве базисной функции, согласно теории ортогональной функции, включает:
представляют собой параметры подгонки; определение параметра подгонки каротажного сигнала, принимая тригонометрическую функцию в качестве базисной функции, согласно теории ортогональной функции, включает:
установление того, равномерно ли дискретизирован каротажный сигнал;
когда каротажный сигнал дискретизирован равномерно, согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определение параметра подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки равномерно дискретизированного сигнала; и,
когда каротажный сигнал дискретизирован неравномерно, выполнение заполнения для пустого сектора каротажного сигнала, и для заполненного сигнала согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определение параметра подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки равномерно дискретизированного сигнала; или согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определение параметра подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки неравномерно дискретизированного сигнала.
2. Способ по п. 1, отличающийся тем, что согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определение параметра подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки неравномерно дискретизированного сигнала включает:
выполнение накопительного суммирования в отношении каротажного сигнала, умножение каротажного сигнала на предварительно установленную тригонометрическую функцию и затем выполнение накопительного суммирования и умножение двух предварительно установленных тригонометрических функций и затем выполнение накопительного суммирования; определение матрицы подгонки и первого вектора подгонки согласно результатам всех накопительных суммирований; при этом предварительно установленная тригонометрическая функция является одной или несколькими из следующих функций:  ,
,  ,
,  и
и  соответственно, результатом накопительного суммирования после умножения каротажного сигнала на предварительно установленную тригонометрическую функцию является единица или более; и
соответственно, результатом накопительного суммирования после умножения каротажного сигнала на предварительно установленную тригонометрическую функцию является единица или более; и
определение параметра подгонки согласно матрице подгонки и первому вектору подгонки.
3. Способ по п. 1, отличающийся тем, что
согласно теории ортогональной функции, принимая тригонометрическую функцию в качестве базисной функции, определение параметра подгонки каротажного сигнала путем использования предварительно установленного алгоритма подгонки равномерно дискретизированного сигнала включает:
выполнение операции усреднения в отношении каротажного сигнала для получения среднего значения, умножение каротажного сигнала на предварительно установленную тригонометрическую функцию и затем выполнение накопительного суммирования, выполнение накопительного суммирования в отношении квадрата предварительно установленной тригонометрической функции; определение второго вектора подгонки согласно среднему значению и результатам всех накопительных суммирований; при этом предварительно установленная тригонометрическая функция является одной или несколькими из следующих функций: ,  ,
,  , ; соответственно, результатом накопительного суммирования после умножения каротажного сигнала на предварительно установленную тригонометрическую функцию является единица или более; и
, ; соответственно, результатом накопительного суммирования после умножения каротажного сигнала на предварительно установленную тригонометрическую функцию является единица или более; и
определение параметра подгонки согласно второму вектору подгонки.
4. Способ по п. 1, отличающийся тем, что
конструкция системы катушки с двойным наклоном содержит:
передающие и приемные катушки, которые соответственно образуют определенный внутренний угол с осевым направлением прибора; при этом осевое направление прибора включает три осевых направления трехмерной прямоугольной системы координат.
5. Способ по п. 1, отличающийся тем, что
выполнение заполнения для пустого сектора каротажного сигнала включает: для каждого пустого сектора выполнение заполнения согласно одному из следующих режимов:
определение данных о заполнении согласно каротажным сигналам секторов на двух сторонах пустого сектора и заполнение пустого сектора определенными данными о заполнении; и
заполнение пустого сектора согласно соответствующему каротажному сигналу пустого сектора в предыдущий период измерения.
6. Способ по п. 1, отличающийся тем, что форма волны секторного измерительного сигнала дополнительно имеет следующие характеристики:

где  ,
,  ,
,  ,
,  и
и  представляют собой параметры, которые подлежат определению и соответствуют следующим уравнениям:
представляют собой параметры, которые подлежат определению и соответствуют следующим уравнениям:  ,
,  ,
,  и
и 
7. Электронный аппарат, содержащий запоминающее устройство и процессор, при этом в запоминающем устройстве хранится компьютерная программа для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения и процессор выполнен с возможностью считывания и запуска компьютерной программы для обработки сигнала азимутального волнового электромагнитного каротажа в процессе бурения для выполнения способа по любому из пп. 1-6.
8. Носитель данных, на котором хранится компьютерная программа, при этом компьютерная программа выполнена с возможностью выполнения способа по любому из пп. 1-6 при запуске.
| US 20050083063 А1, 21.04.2005 | |||
| US 2020355057 A1, 12.11.2020 | |||
| US 6181138 B1, 30.01.2001 | |||
| US 2016054468 A1, 25.02.2016 | |||
| Отбойка для погонялки ткацкого станка | 1927 |
|
SU7587A1 |

