Изобретение относится к области радиолокации и может быть использовано при разработке систем обеспечения безопасной посадки воздушного судна вертолетного типа (ВСВТ) на водоем со снежно-ледяным покровом в условиях недостаточной информативности закабинного пространства о подстилающей поверхности.
Известно «Устройство выбора площадки для посадки воздушного судна вертолетного типа», принятое за прототип, №2737760 опубл. 02.12.2020, МПК G01S 13/93, РЛС зондирования подстилающей поверхности размещенная в нижней части фюзеляжа вертолета для обеспечения возможности безопасной посадки вертолета на неподготовленную заснеженную площадку в условиях недостаточной информативности закабинного пространства о подстилающей поверхности.
Недостатком устройства-прототипа является низкая вероятность выбора площадки для посадки воздушного судна вертолетного типа, при наличии водоема со снежно-ледяным покровом места посадки, связанная с отсутствием оценки состояния подстилающей поверхности.
Техническим результатом изобретения является повышение вероятности выбора площадки для посадки воздушного судна вертолетного типа на водоем со снежно-ледяным покровом за счет того, что дополнительно введен в антенную систему комплекс приемопередающих антенн с вертикальной и горизонтальной поляризацией, установленных на борту в секторах α=0; 2π отклоняющихся от вертикали на угол γ=25°…45° с центром ДН, совпадающим с центром ДН направленной вертикально вниз неподвижной приемо-передающей антенны, блок определения состояния (идентификации) слоев подстилающей поверхности, электрически подключенных через антенный переключатель, единое приемо-передающее устройство и аналогово-цифровой преобразователь.
Известно [Особенности взлетов и посадок на пыльных, песчаных или заснеженных площадках: [Электронный ресурс]. URL: http://www.svvaul.ru /component/k2/600-osobennosti-vzletov-i-posadok-na-pylnykh-peschanykh-ili-zasnezhennykh-ploshchadkakh. (дата обращения: 22.10.2020)], посадку на заснеженную площадку по-вертолетному разрешается выполнять при толщине снежного покрова до 50 см, при наличии на поверхности плотного наста, исключающего возможность образования снежного вихря, в котором отсутствует горизонтальная и вертикальная видимость, чтобы избежать проваливания вертолета в сугроб. Для определения глубины снежного покрова при посадке человек должен двигаться по посадочной площадке [Меры безопасности при применении вертолетов: [Электронный ресурс]. URL: https://studopedia.ru/10_104903_meri-bezopasnosti-pri-primenenii-vertoletov.html (дата обращения: 22.10.2020)].
Известно [Особенности посадки по-вертолетному на пыльную (заснеженную) площадку: [Электронный ресурс]. URL: https://studopedia.su/16_21971_posadka.html (дата обращения: 22.10.2020)], потребная толщина пресноводного льда для посадки вертолета на колесном шасси определяется по формуле  при температуре несущего винта Тнв≤-10°С,
при температуре несущего винта Тнв≤-10°С,  при 0≥Тнв≥-10°С, где Pmax - полетная масса, на лыжном шасси
при 0≥Тнв≥-10°С, где Pmax - полетная масса, на лыжном шасси  при Tнв≤-10°С,
при Tнв≤-10°С,  при 0≥Тнв≥-10°С.
при 0≥Тнв≥-10°С.
Под обеспечением безопасной посадки воздушного судна вертолетного типа понимается исключение проваливания под снег, лед, опрокидывания вертолета при посадке днем и ночью, в простых и сложных метеоусловиях (туман, дымка, дождь, снег, запыленность или задымленность атмосферы), а также в условиях поднятой с грунта пыли или снега его вращающимся винтом [Приказ Минтранса РФ от 31 июля 2009 г. №128 «Об утверждении Федеральных авиационных правил «Подготовка и выполнение полетов в гражданской авиации Российской Федерации»].
Указанный технический результат достигается тем, что в устройство выбора площадки для посадки воздушного судна вертолетного типа, содержащее антенную систему состоящую из комплекса приемопередающих антенн, установленных на борту в секторах α=2π/М, где М - количество приемо-передающих антенн, отклоняющихся от вертикали на угол β=arctgR/hвсвт, где R - радиус зоны посадки, hвсвт - высота зависания воздушного судна вертолетного типа, и направленной вертикально вниз неподвижной приемо-передающей антенны, подключенных через антенный переключатель к единому приемопередающему устройству, аналогово-цифровому преобразователю, микропроцессорной системе и блоку принятия решения, согласно изобретению, дополнительно введен в антенную систему комплекс приемопередающих антенн с вертикальной и горизонтальной поляризацией, установленных на борту в секторах α=0; 2π отклоняющихся от вертикали на угол γ=25°…45° с центром ДН, совпадающим с центром ДН направленной вертикально вниз неподвижной приемо-передающей антенны, блок определения состояния (идентификации) слоев подстилающей поверхности, электрически подключенных через антенный переключатель, единое приемо-передающее устройство и аналогово-цифровой преобразователь.
Сущность заявляемого устройства состоит в том, что дополнительно введен в антенную систему комплекс приемо-передающих антенн с вертикальной и горизонтальной поляризацией, установленных на борту в секторах α=0; 2π отклоняющихся от вертикали на угол γ=25°…45° с центром ДН, совпадающим с центром ДН направленной вертикально вниз неподвижной приемо-передающей антенны, блок определения состояния (идентификации) слоев подстилающей поверхности, электрически подключенных через антенный переключатель, единое приемо-передающее устройство и аналогово-цифровой преобразователь.
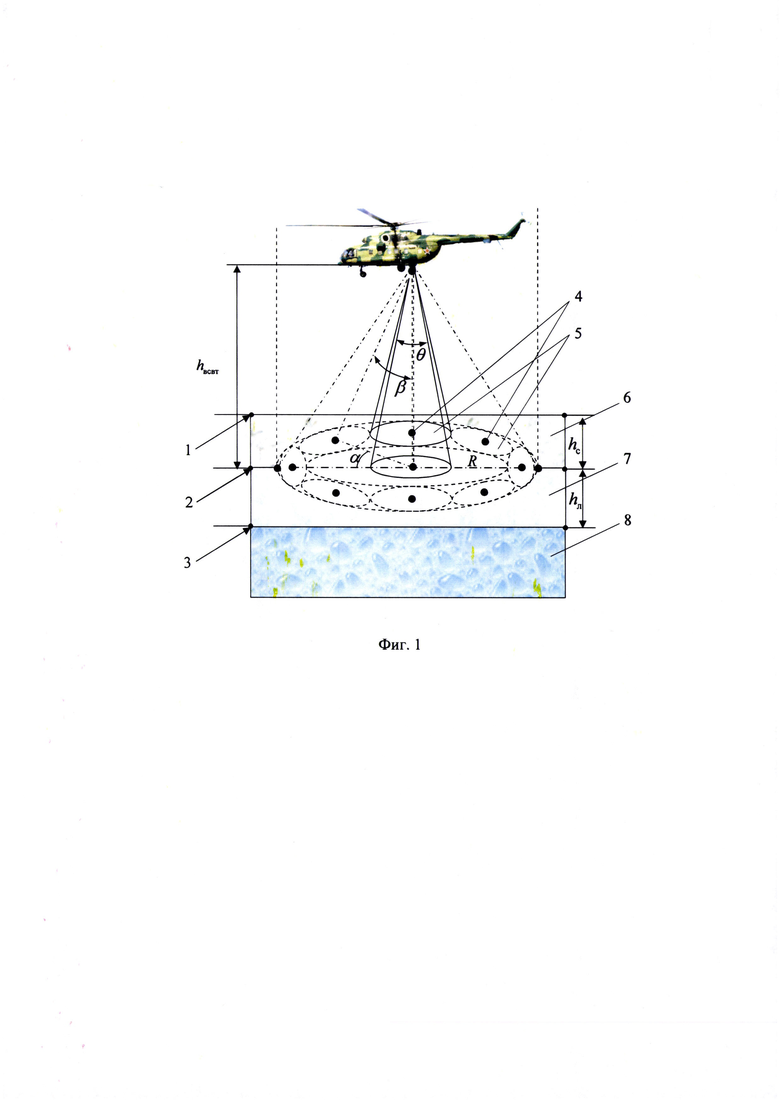
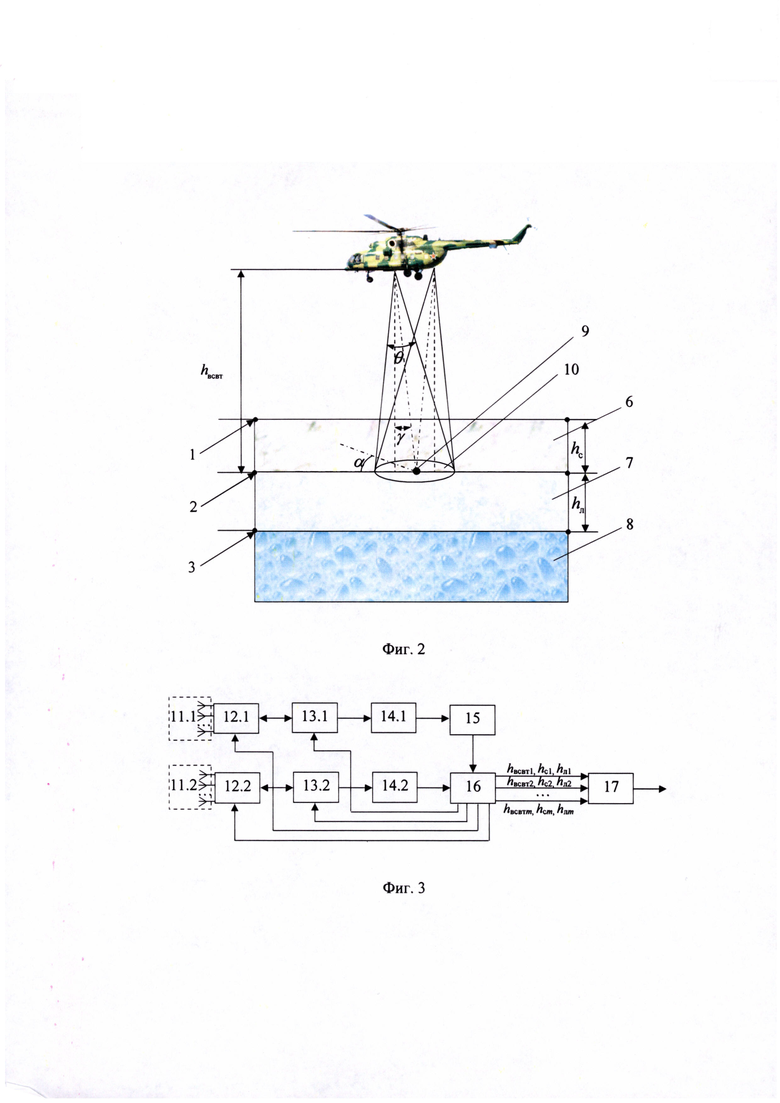
Сущность изобретения поясняется фиг. 1 и фиг. 2, где представлено положение ВСВТ и обозначено: 1 - граница раздела «тропосфера - снежный покров»; 2 - граница раздела «снежный покров - ледяной покров»; 3 - граница раздела «ледяной покров - вода»; 4 - точка на ледяной поверхности с полярными координатами αm=αm-1+2π/М, где m=1…М, α0=0, М - количество приемо-передающих антенн, отклоняющихся от вертикали на угол β=arctgR/hвсвт, где R - радиус зоны посадки, куда направляется ось ДН m-ой приемо-передающей антенны комплекса приемо-передающих антенн, установленных в секторе α=2π/М, hвсвт - высота зависания ВСВТ, и по нормали; 5 - зона приема эхо-сигналов, ограниченная шириной ДН антенны β=2arctgR/всвт0, где hвсвт0 - высота зависания ВСВТ пред началом этапа посадки его m-ой приемо-передающей антенны; 6 - снежный покров; 7 - ледяной покров; 8 -вода; hвсвт - высота воздушного судна вертолетного типа; hc - толщина снежного покрова; hл - толщина ледяного покрова; 9 - точка на ледяной поверхности куда направляется ось ДН приемо-передающих антенн с вертикальной и горизонтальной поляризацией комплекса приемопередающих антенн, установленных в секторах α=0; 2π, отклоняющихся от вертикали на угол γ=25°…45° с центром ДН совпадающим с центром ДН направленной вертикально вниз неподвижной приемо-передающей антенны; 10 - зона приема эхо-сигналов, ограниченная шириной ДН антенны θ=2arctgR/hвсвт, состоит в том, что в процессе вертикального снижения при наличии снежно-ледяного покрова дополнительно осуществляют зондирование сигналом с линейной частотной модуляцией (ЛЧМ) в интервале β=arctgR/hвсвт и γ=25°…45°, позволяющий получить отраженный сигнал от границы раздела сред «тропосфера - снежный покров» в верхнем диапазоне частот, а от границы раздела сред «снежный покров - ледяной покров» и «ледяной покров - вода» в нижнем диапазоне частот, передающего устройства fпрд(t)=fн+νtлчм ∀ 0<tлчм<Tлчм, где fн - частота излучаемого ЛЧМ-сигнала в начальный момент времени, ν=(fк-fн)/Tлчм=В/Тлчм- скорость изменения частоты ЛЧМ-сигнала (крутизна ЛЧМ-сигнала), tлчм - время в течение отдельного периода модуляции ЛЧМ-сигнала (быстрое время), Тлчм - период модуляции зондирующего сигнала, т.е. время развертки ЛЧМ-сигнала, В - ширина спектра (девиация) ЛЧМ-сигнала, и прием отраженных эхо-сигналов fпрм(tлчм)=fн+ν(tлчм-τ3), ∀ τ3<tлчм<Тлчм от границ раздела сред «тропосфера - снежный покров», «снежный покров - ледяной покров» и «ледяной покров - вода» с временными задержками τ3=2r/Vcp, где r - расстояние до границ раздела сред, Vcp - скорость распространения электромагнитной волны в среде с М угловых направлений комплексом приемо-передающих антенн, установленными на борту в секторах α=2π/М, отклоняющихся на угол от вертикали β=arctgR/hвсвт, и по нормали, с комплекса приемо-передающих антенн с вертикальной и горизонтальной поляризацией, установленных в секторах α=0; 2π, отклоняющихся от вертикали на угол γ=25°…45° с центром ДН совпадающим с центром ДН направленной вертикально вниз неподвижной приемо-передающей антенны, определяют состояние (идентификацию) слоев подстилающей поверхности в виде снежно-ледяного покрова водоема по поляризационным отношениям коэффициентов отражения Френеля, глубину снежного покрова в каждом секторе приема hcm и сравнивают их с заданным значением глубины снежного покрова ncΔ, при значении меньше допустимого определяют глубину ледяного покрова в каждом секторе приема измерением hлm и сравнивают с рассчитанным значением толщины ледяного покрова hлΔ, при глубине снежного покрова выше заданного в любом из секторов либо глубине ледяного покрова меньше рассчитанного значения в любом из секторов посадку запрещают с рекомендацией экипажу отображением на многофункциональном индикаторе и в головных телефонах.
Структурная схема устройства выбора площадки для посадки воздушного судна вертолетного типа на водоем со снежно-ледяным покровом приведена на фиг. 3, где обозначено: 11 - комплекс приемопередающих антенн; 12 - антенный переключатель; 13 - приемо-передающее устройство; 14 - аналогово-цифровой преобразователь; 15 - блок определения состояния (идентификации) слоев подстилающей поверхности; 16 - микропроцессорная система; 17 - блок принятия решений.
Приемо-передающее устройство 13.1 осуществляет формирование линейно-частотного модулированного сигнала с частотой fпрд(t)=fн+vtлчм, подключенное к комплексу приемо-передающих антенн с вертикальной и горизонтальной поляризацией 11.1, установленных на борту в секторах α=0; 2π, отклоняющихся от вертикали на угол γ=25°…45° с центром ДН совпадающим с центром ДН направленной вертикально вниз неподвижной приемо-передающей антенны, через антенный переключатель 12.1 подключающий приемо-передающие антенны с вертикальной и горизонтальной поляризацией 11.1, управляемый микропроцессорной системой 16. ЛЧМ-сигнал излучается одновременно приемо-передающими антеннами с вертикальной и горизонтальной поляризацией в направлении центра ДН неподвижной приемо-передающей антенны расположенной по нормали к подстилающей поверхности. Отраженный сигнал от подстилающей поверхности принимается приемо-передающими антеннами с вертикальной и горизонтальной поляризацией отклоняющихся от вертикали на угол γ=25°…45°, в направлении центра ДН неподвижной приемо-передающей антенны расположенной по нормали к подстилающей поверхности и через антенный переключатель 12.1 поступает в приемник приемо-передающего устройства 13.1 с частотой fпрм(tлчм)=fн+ν(tлчм_τ3), Сигнал приемного устройства перемножается с сигналом передающего устройства в квадратурном смесителе, выходом которого является сигнал с разностной частотой (частотой биения) fб=fпрд-fпрм=ντ3=2rB/VcpТлчм на соответствующих поляризациях.
Сигнал с частотой биения поступает на n-разрядный аналого-цифровой преобразователь (АЦП) 14.1 с частотой дискретизации fд.
Выход АЦП электрически соединен с входом блока определения состояния (идентификации) слоев подстилающей поверхности 15.
Цифровой сигнал с АЦП 14.1 подается на вход блока определения состояния (идентификации) слоев подстилающей поверхности 15, осуществляется определение состояния снежно-ледяного покрова, посредством косвенного измерения комплексной относительной диэлектрической проницаемости каждого последующего нижележащего слоя снежно-ледяного покрова по поляризационным отношениям коэффициентов отражения Френеля сигналов с вертикальной и горизонтальной поляризацией [Машков В.Г. Метод дистанционной идентификации состояния снежно-ледяного покрова по отношениям коэффициентов отражения Френеля // Известия вузов России. Радиоэлектроника. 2020. Т. 23, №5. С. 46-56. doi: 10.32603/1993-8985-2020-23-5-46-56]. Выход блока 15 электрически соединен с входом микропроцессорной системы 16.
Приемо-передающее устройство 13.2 осуществляет формирование линейно-частотного модулированного сигнала с частотой fпрд(t)=fн+νtлчм, подключенное к комплексу приемо-передающих антенн 11.2, установленных на борту в секторах α=2π/М, отклоняющихся на угол от вертикали β=arctgR/hвсвт, и по нормали, с шириной ДН антенн θ=2arctgR/hвсвт0, где hвсвт0 - высота зависания ВСВТ пред началом этапа посадки его m-ой приемно-передающей антенны, R - радиус зоны посадки, через антенный переключатель 12.2 последовательно подключающий М приемо-передающих антенн 11.2, управляемый микропроцессорной системой 16. ЛЧМ-сигнал излучается последовательно приемо-передающими антеннами в направлении М секторов и по нормали к земной поверхности места посадки с не пересекающимися ДН. Отраженный сигнал от подстилающей поверхности принимается приемопередающими антеннами в направлении М секторов и по нормали к земной поверхности места посадки с не пересекающимися ДН и через антенный переключатель 12.2 поступает в приемник приемо-передающего устройства 13.2 с частотой fпрм(tлчм)=fн+ν(tлчм-τ3). Сигнал приемного устройства перемножается с сигналом передающего устройства в квадратурном смесителе, выходом которого является сигнал с разностной частотой (частотой биения) fб=fпрд-fпрм=ντ3=2rB/VcpTлчм.
Сигнал с частотой биения поступает на n-разрядный аналого-цифровой преобразователь (АЦП) 14.2 с частотой дискретизации fд.
Выход АЦП электрически соединен с входом микропроцессорной системы 16 функционирующей согласно алгоритму, поясняющего принцип действия, представленного ниже.
Микропроцессорная система 16 синхронизирует последовательную работу приемо-передающего устройства 13.1 и приемо-передающих антенн с вертикальной и горизонтальной поляризацией 11.1 через антенный переключатель 12.1 с работой приемо-передающего устройства 13.2 и М приемо-передающих антенн 11.2 через антенный переключатель 12.2, вычисляет задержку первого максимума сигнала, соответствующая расстоянию до границы раздела сред «тропосфера - снежный покров», второго максимума соответствующая расстоянию до границы раздела сред «снежный покров - ледяной покров» и третьего максимума соответствующая расстоянию до границы раздела сред «ледяной покров -вода» согласно r=fбVcpTлчм/2B. Высота зависания ВСВТ hвсвт вычисляется относительно второго максимума соответствующая расстоянию до границы раздела сред «снежный покров - ледяной покров» в направлении М секторов и по нормали к подстилающей поверхности места посадки.
Разность времени задержки между этими максимумами будет соответствовать глубине снежного покрова в каждом секторе приема hсm которые сравниваются с заданным значением глубины снежного покрова hcΔ в блоке принятия решений 17. При превышении заданного значения глубины снежного покрова hcΔ формируется сигнал запрета посадки по превышению глубины снежного покрова в соответствующем М секторе.
При значении меньше допустимого определяется глубина ледяного покрова в каждом секторе приема hлm и сравнивают с рассчитанным значением толщины ледяного покрова hлΔ в блоке принятия решений 17.
При значении толщины ледяного покрова hлΔ меньше рассчитанного hлΔ формируется сигнал запрета посадки по толщине ледяного покрова меньше рассчитанного значения в соответствующем М секторе.
При глубине ледяного покрова в каждом секторе приема hлΔ больше допустимого формируется сигнал разрешения на посадку ВСВТ, поступающий в качестве рекомендации экипажу на многофункциональный индикатор и в головные телефоны.
Выходом устройства выбора площадки для посадки воздушного судна вертолетного типа на водоем со снежно-ледяным покровом является блок принятия решений 17, выходом которого является сигнал о разрешении или запрещении посадки на данной площадке.
Предлагаемое техническое решение является новым и имеет изобретательский уровень, поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленное устройство выбора площадки для посадки воздушного судна вертолетного типа на водоем со снежно-ледяным покровом в условиях недостаточной информативности закабинного пространства в зоне посадки вертолета, обеспечивает оценку состояния (идентификацию) слоев снежно-ледяного покрова водоема по поляризационным отношениям эхо-сигналов с вертикальной и горизонтальной поляризацией, измерение глубины снежного и толщины ледяного покрова за счет приема эхо-сигналов непосредственно из зоны посадки вертолета с выдачей рекомендации экипажу на многофункциональный индикатор и в головные телефоны о возможности посадки воздушного судна вертолетного типа на водоем со снежно-ледяным покровом либо отсутствие таковой.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВЫБОРА ПЛОЩАДКИ ДЛЯ ПОСАДКИ ВОЗДУШНОГО СУДНА ВЕРТОЛЁТНОГО ТИПА | 2019 |
|
RU2737760C1 |
| СПОСОБ ОЦЕНКИ ВОЗМОЖНОСТИ ПОСАДКИ ВОЗДУШНОГО СУДНА ВЕРТОЛЁТНОГО ТИПА НА ВОДОЁМ СО СНЕЖНО-ЛЕДЯНЫМ ПОКРОВОМ | 2019 |
|
RU2737761C1 |
| СПОСОБ ВЫБОРА ПЛОЩАДКИ ДЛЯ ПОСАДКИ ВОЗДУШНОГО СУДНА ВЕРТОЛЕТНОГО ТИПА | 2019 |
|
RU2707275C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ИДЕНТИФИКАЦИИ СОСТОЯНИЯ СНЕЖНО-ЛЕДЯНОГО ПОКРОВА | 2020 |
|
RU2750563C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ СНЕЖНО-ЛЕДЯНОГО ПОКРОВА | 2020 |
|
RU2750651C1 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ СНЕЖНО-ЛЕДЯНОГО ПОКРОВА | 2020 |
|
RU2750562C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОЙ ПОСАДКИ ВЕРТОЛЕТА В УСЛОВИЯХ ОТСУТСТВИЯ ИЛИ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2014 |
|
RU2561496C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1999 |
|
RU2173864C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| СПОСОБ ДИНАМИЧЕСКОГО ИЗМЕНЕНИЯ ШИРИНЫ ПОЛОСЫ ЗАХВАТА В РАДАРЕ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2019 |
|
RU2709483C1 |
Изобретение относится к области радиолокации и может быть использовано при разработке систем обеспечения безопасной посадки воздушного судна вертолетного типа (ВСВТ) на водоем со снежно-ледяным покровом в условиях недостаточной информативности закабинного пространства о подстилающей поверхности. Техническим результатом изобретения является повышение вероятности выбора площадки для посадки воздушного судна вертолетного типа на водоем со снежно-ледяным покровом. Устройство содержит подключенные через антенный переключатель к единому приемо-передающему устройству, аналогово-цифровому преобразователю, микропроцессорной системе и блоку принятия решения антенную систему, состоящую из комплекса приемо-передающих антенн, установленных на борту в секторах α=2π/М, где М - количество приемо-передающих антенн, и направленной вертикально вниз неподвижной приемо-передающей антенны. Антенны комплекса выполнены отклоняющимися от вертикали на угол β=arctgR/hвсвт, где R - радиус зоны посадки, hвсвт - высота зависания воздушного судна вертолетного типа. В антенную систему дополнительно введен комплекс приемо-передающих антенн с вертикальной и горизонтальной поляризацией и блок определения состояния (идентификации) слоев подстилающей поверхности. Дополнительный комплекс приемо-передающих антенн установлен на борту в секторах α=0; 2π, отклоняющихся от вертикали на угол γ=25°…45° с центром ДН, совпадающим с центром ДН направленной вертикально вниз неподвижной приемо-передающей антенны. 3 ил.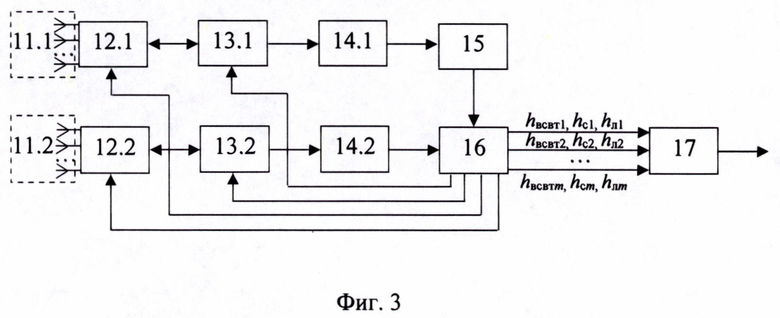
Устройство выбора площадки для посадки воздушного судна вертолетного типа, содержащее антенную систему, состоящую из комплекса приемо-передающих антенн, установленных на борту в секторах α=2π/М, где М - количество приемо-передающих антенн, отклоняющихся от вертикали на угол β=arctgR/hвсвт, где R - радиус зоны посадки, hвсвт - высота зависания воздушного судна вертолетного типа, и направленной вертикально вниз неподвижной приемо-передающей антенны, подключенных через антенный переключатель к единому приемо-передающему устройству, аналогово-цифровому преобразователю, микропроцессорной системе и блоку принятия решения, отличающееся тем, что дополнительно введен в антенную систему комплекс приемо-передающих антенн с вертикальной и горизонтальной поляризацией, установленных на борту в секторах α=0; 2π, отклоняющихся от вертикали на угол γ=25°…45° с центром диаграммы направленности (ДН), совпадающим с центром ДН направленной вертикально вниз неподвижной приемо-передающей антенны, блок определения состояния (идентификации) слоев подстилающей поверхности, электрически подключенных через антенный переключатель, единое приемо-передающее устройство и аналогово-цифровой преобразователь.
| УСТРОЙСТВО ВЫБОРА ПЛОЩАДКИ ДЛЯ ПОСАДКИ ВОЗДУШНОГО СУДНА ВЕРТОЛЁТНОГО ТИПА | 2019 |
|
RU2737760C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОЙ ПОСАДКИ ВЕРТОЛЕТА В УСЛОВИЯХ ОТСУТСТВИЯ ИЛИ ОГРАНИЧЕННОЙ ВИДИМОСТИ | 2014 |
|
RU2561496C1 |
| СПОСОБ ПОСАДКИ ВЕРТОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2516244C2 |
| СПОСОБ ПОЛУЧЕНИЯ КИНЕМ/\ТОГРАФИЧЕСКИХ ГИДРОТИПНЫХ ИЗОБРАЖЕНИЙ | 0 |
|
SU166885A1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ В ЗОНЕ ПОСАДКИ ВЕРТОЛЕТА | 2016 |
|
RU2672578C2 |
| WO 2009045670 A1, 09.04.2009 | |||
| ГИДРОДИНАМИЧЕСКАЯ МУФТА | 2000 |
|
RU2232315C2 |
| US 8521343 B2, 27.08.2013 | |||
| US 9617011 B2, 11.04.2017 | |||
| US 2013179011 A1, 11.07.2013 | |||
| JPH 06249943 A, 09.09.1994. | |||

