ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к способам управления беспилотных летательных аппаратов, а именно способу автономного приземления беспилотного летательного аппарата на мобильную платформу.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известен, например, способ точной посадки беспилотного летательного аппарата (см. RU2615587, опубл. 05.04.2017) Для точной посадки БПЛА получают временную последовательность кадров с оптической камеры на БПЛА, закодированную в битовый поток и содержащую данные об не менее одной оптической метке, расположенной в точке посадки, определяют не менее двух углов смещения при помощи алгоритмов компьютерного зрения, получают и обрабатывают с помощью рекурсивного фильтра данные о не менее двух углов наклона и высоте БПЛА, определяют вектор смещения БПЛА, формируют и направляют сигналы управления при помощи пропорционально-интегрально-дифференцирующего регулятора на полетный контроллер БПЛА, корректируют траекторию посадки БПЛА.
Также из уровня техники известно устройство для поддержки позиционирования объекта (см. RU2782702, опубл. 01.11.2022), которое содержит по меньшей мере один блок группы источников света, состоящий из блока главного источника света и двух блоков вспомогательных источников света, расположенных определенным образом, причем цвет излучения главного источника отличается от цвета вспомогательных источников.
В качестве наиболее близкого аналога заявленного способа может быть выбран способ управления автономным миниатюрным много- или квадрокоптерным вертолетом (см. EP1901153A1, опубл. 19.03.2008). Традиционные алгоритмы автономного управления используют идеальные модели с центром тяжести (ЦТ) в начале координат фиксированной системы координат тела. Сбрасывание полезной нагрузки в полете или создание миниатюрных летательных аппаратов могут вызвать проблемы, например: потому что датчики не могут быть идеально установлены в ЦТ или потому, что ЦТ смещена от начала координат первоначально предполагаемой фиксированной системы координат тела. Последствиями являются дополнительные ускорения и скорости, воспринимаемые датчиками, поэтому эти эффекты должны учитываться системой управления. В данной статье описывается моделирование динамического поведения относительно переменных центров тяжести и аспекты управления квадрокоптерным вертолетом. Способ управления беспилотным летательным аппаратом, в частности беспилотным многовинтовым вертолетом, более конкретно беспилотным четырехвинтовым вертолетом, включает этапы: применение корректировки в реальном времени при оценке управляющих параметров полета аппарата, оценку управляющих параметров полета аппарата с учетом реальной динамики полета аппарата путем учета влияния смещения ЦТ из начала координат исходной фиксированной системы координат тела аппарата, а также путем учета дополнительных ускорений и/или скоростей, вызванных смещением ЦТ и путем нелинейного изменения параметра в пределах регулирования высоты с помощью функции гиперболического тангенса.
Управление движением беспилотного летательного аппарата в ближайших аналогах основано на применение маркеров и меток на мобильных платформах, что не всегда выполнимо. Ближайший аналог применяет управления путем отслеживания центра тяжести, такой подход может быть также эффективен, однако применяемое в заявленном способе использование данных о движении приводов для оценки перемещения, по мнению заявителя является более эффективным для достижения точности приземления беспилотного летательного аппарата на мобильную платформу
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Техническим результатом заявленного изобретения является повышение точности приземления беспилотного летательного аппарата на мобильную платформу.
Заявленный технический результат достигается посредством создания способа автономного приземления беспилотного летательного аппарата на мобильную платформу основанный на одометрии, включающего автономное перемещение БПЛА за мобильной платформой, использование данных положения и одометрии от мобильной платформы и приземление БПЛА на мобильную платформу при достаточном приближении к ней.
Заявленный способ характеризуется тем, что извлекают данные местоположения из данных локализации мобильной платформы и используют эти данные для определения местоположения мобильной платформы в глобальной системе координат, далее преобразуют эти данные в системе управления БПЛА и создают его траекторию использую B-сплайна интерполяцию, при этом БПЛА и мобильная платформа осуществляют непрерывную связь и управление скоростью и местоположением БПЛА.
В предпочтительном варианте выполнения система управления беспилотного летательного аппарата использует расширенный фильтр Калмана (EKF) для обработки данных местоположения.
В предпочтительном варианте выполнения для создания B-сплайна требовалось не менее четырех контрольных точек имеющие производные до 3-го порядка.
В предпочтительном варианте выполнения преимущественно осуществляют управление скоростью четырехроторного двигателя БПЛА.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется схемы, на которых:
Рис. 1 - мобильная платформа;
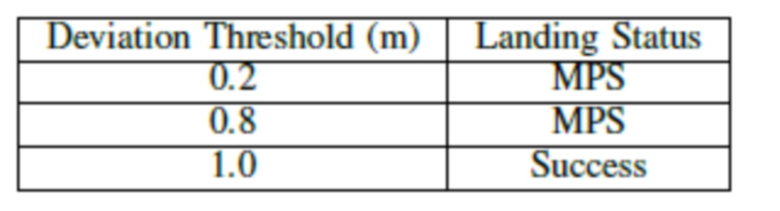
Рис.2 - генерация траектории и ее следование;
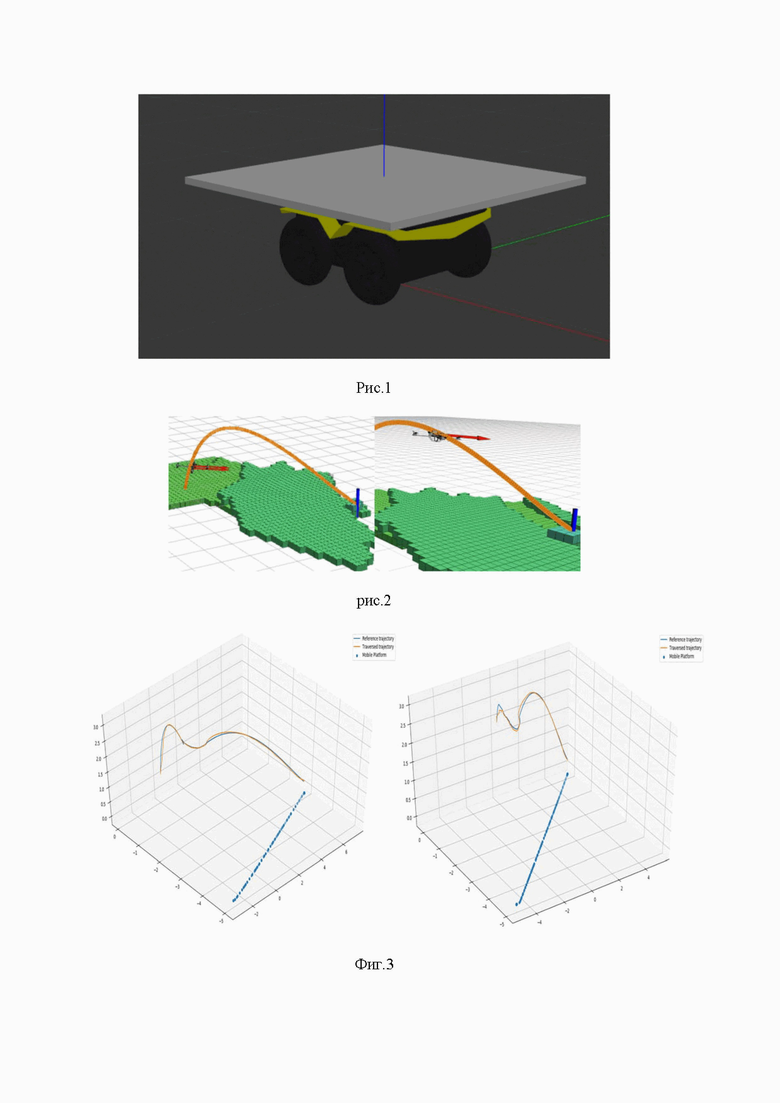
Рис.3 - сгенерированная фактическая траектория БПЛА и траектория мобильной платформы;
Рис.4 - отслеживание и посадка БПЛА.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Заявленный способ автономного приземления беспилотного летательного аппарата на мобильную платформу был смоделирован при помощи аппаратного и программного обеспечение для моделирования.
Используемая система состояла из моделирования с участием беспилотного летательного аппарата (БПЛА) и беспилотного наземного транспортного средства. Все задачи выполнялись в Ubuntu 18.04 и ROS Melodic. Используемые пакеты ROS включали multi jackal и tf/tf2 для трансформации.
БПЛА был создан на базе Px4 Autopilot с использованием классического квадрокоптера. Интерфейс управления этим дроном был предоставлен через PX4, который
поддерживает как программное обеспечение в цикле (SITL), так и аппаратное обеспечение моделирования цикла (HITL). Для передачи информации использовали MAVROS, который является прокси-сервером MAVLink для ROS.
Для мобильной платформы была использована симуляция мобильного транспортного средства multi jackal от Clearpath robotics. Это входит в моделирование ROS/Gazebo с использованием пакета ROS для нескольких мобильных платформ. Изображение беспилотного транспортного средства, модифицированного с включением посадочной площадки показано на рис. 1.
Обнаружение и оценка местоположения БПЛА были достигнуты путем получения
данные о местоположения с мобильной платформы и летательного аппарата. Данные местоположения для мобильной платформы xt, yt. для БПЛА xt, yt, zt, θt, где θ — угол отклонения от курса. Мобильные роботы обычно включают в себя по крайней мере одну
форму локализации для оценки своего местоположения относительно глобальной системы координат. Таким образом, предлагаемое решение предполагало, что после надлежащей
локализации, будут получены данные об относительном местоположении летательного аппарата и мобильной платформы Система управления беспилотного летательного аппарата использует расширенный фильтр Калмана (EKF) для обработки данных местоположения. Для определения местоположения применялись
 - местоположение БПЛА в локальной системе координат;
- местоположение БПЛА в локальной системе координат;
 - местоположение БПЛА в глобальной системе координат;
- местоположение БПЛА в глобальной системе координат;
 - местоположение мобильной платформы в глобальной системе координат.
- местоположение мобильной платформы в глобальной системе координат.
 требуется, поскольку управление БПЛА всегда определяет локальную систему координат. Важные данные о местоположении БПЛА - положение его по координатам x, y, z. Учитывая эти данные и местоположение мобильной платформы на кадре дрона, было получено.
требуется, поскольку управление БПЛА всегда определяет локальную систему координат. Важные данные о местоположении БПЛА - положение его по координатам x, y, z. Учитывая эти данные и местоположение мобильной платформы на кадре дрона, было получено.
Траектория БПЛА была сгенерирована методом B-Spline интерполяции. Сплайн создавал траекторию, а его производная 1-го порядка давала скорость, с которой мобильная платформа должна следовать по этой траектории. Для создания B-Spline требовалось не менее четырех контрольных точек, имеющих производные до 3-го порядка.
После генерации траектории траектория отслеживалась с помощью контроллера, который использовал информацию о положении и скорости от генератора траекторий. Четырехроторным двигателем можно управлять посредством управления положением (x, y, z), управлением скоростью (x˙, y˙, z˙ и скорость рыскания) или через ориентацию (ориентацию относительно глобальной системы координат). Был выбран контроль скорости, поскольку он имеет дополнительную функцию. Чтобы уменьшить интенсивность вычислений, движение с 4 степенями свободы была использована упрощенная модель движения, которая была выражена следующим образом:

При этом контроллер мобильной платформы используется для регулирования местоположения БПЛА.
Посадка БПЛА осуществлялась через контур управления. Первоначально БПЛА необходимо перемесить в целевую точку, т.е. в центр мобильная платформа. Контур управления проверяет не произошло ли значительное смещение мобильной платформы. Если платформа существенно отклонялась, генерируется новая траектория, которая имела положение и скорость для перемещения БПЛА в новую целевую позу. Если мобильная платформа не отклонялась значительно, когда БПЛА прибывает в эталонную точку, корректируют своё местоположение относительно центра мобильной платформы и приземляется на него. Как указано выше, высота цели была рассчитана как фактор высоты мобильной платформы.
Сведения о местоположения объектов получают с БПЛА и мобильной платформы были трансформированы в кадр глобальной системы координат. Преобразование было осуществлено с помощью статических преобразований, которые дали начальное преобразование между БПЛА в глобальную систему координат и между мобильной платформой в глобальную систему координат. Затем было рассчитано преобразование между мобильной платформой и БПЛА.
Далее были сделаны следующие преобразования
 , где
, где
 -местоположение с известным глобальным статистическим преобразованием.
-местоположение с известным глобальным статистическим преобразованием.
 Отслеживание положения мобильной платформы относительно БПЛА
Отслеживание положения мобильной платформы относительно БПЛА  , рассчитывали по (4), что давало относительное расстояние между БПЛА и мобильной платформой на каждом временном шаге.
, рассчитывали по (4), что давало относительное расстояние между БПЛА и мобильной платформой на каждом временном шаге.
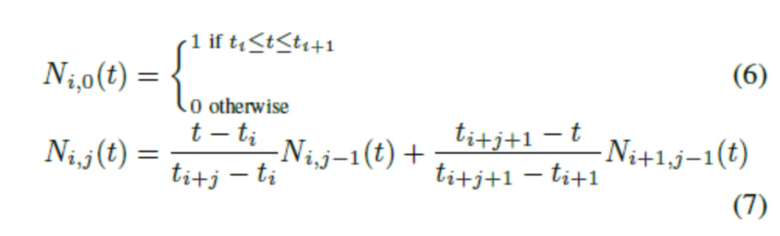
Генератор траектории B-Spline имеет вид (5), где

где Ni,j — базовая функция, а Pi — i-е управление точка. j относится к степени полинома, и существует n + 1 контрольные точки, в данном случае n = 3.
Базисная функция рассчитывалась с использованием формулы Кокса-де Бура рекурсивная формула.
Производная сплайна дает скорость и имеет вид согласно (8), а производная базисной функции ˙N равна (9)
Предложенное решение было протестировано с помощью нескольких экспериментов по моделированию, призванных обеспечить правильные преобразования между системами отсчета, точное формирование траектории, точное отслеживание и возможное приземление, когда мобильная платформа неподвижна; и формирование и восстановление траектории при движении мобильной платформы и возможной посадке. Генерация и отслеживание траектории также работали точно, как показано на рис. 2
Отслеживание эталонного пути работало хорошо, как показано на рис.3, где показаны сгенерированная траектория и траектория, пройденная БПЛА, с путем, по которому следует мобильная платформа. Пространство между траекторией движения БПЛА и мобильной платформой равно высоте мобильной платформы. Траектория БПЛА показала, что она менялась по мере движения мобильной платформы, пока она не смогла приземлиться на мобильную платформу
Посадка происходила в конце траектории или когда БПЛА и мобильная платформа находились достаточно близко. Для определения этой близости использовался порог в 0,1 м, устанавливавший его на более низком уровне значения сложной посадки при движении платформы.
Gazebo симуляция показана на рис.4.
В таблице I показан процент успеха с учетом порога отклонения. Новая траектория генерировалась, если мобильная платформа выходила за пределы этого порога. Согласно Таблице I, статус приземления MPS указывает на то, что БПЛА может приземлиться только тогда, когда транспортное средство прекратило движение. Очевидно, что более высокий порог отклонения сделал посадку с движением успешной. Это произошло потому, что при формировании траектории дрон всегда следовал по этой траектории, но мобильная платформа могла переместиться к моменту, когда БПЛА достиг конца траектории. Установка более высокого порога означает, что БПЛА пытается добраться до дрона, а не генерирует траекторию.
Таблица I
Результаты показывают, что фундаментальное предположение об успехе предлагаемого решения заключается в том, что БПЛА и мобильная платформа точно локализуются и производят точные данные местоположения.
Целью данного изобретения является выполнение автономной посадки БПЛА на мобильную платформу. Решение осуществляется с использованием стратегий управления и данных одометрии без дополнительных входных данных от LiDAR или камер. Реализация предложенного решения была выполнена в ROS.
Платформа была протестирована с использованием реалистичного моделирования от Gazebo и RViz. Тестирование проводилось для стационарного и динамического случаев. Во всех случаях было установлено, что цель исследования успешно достигается при определенных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСАДКИ БПЛА НА МОБИЛЬНУЮ ПЛАТФОРМУ | 2024 |
|
RU2828305C1 |
| Система доставки груза на место проведения горнодобывающим субъектом взрывных работ (варианты) | 2024 |
|
RU2840365C1 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2615587C9 |
| СПОСОБ БЕЗАВАРИЙНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2727044C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
Изобретение относится к способу автономного приземления беспилотного летательного аппарата (БПЛА) на мобильную платформу. Для приземления БПЛА на мобильную платформу обеспечивают автономное перемещение БПЛА за мобильной платформой, используя непрерывную связь с мобильной платформой для получения данных положения и одометрии от мобильной платформы для определения ее местоположения в глобальной системе координат, преобразуют эти данные в системе управления БПЛА, создают траекторию полета БПЛА, используя интерполяцию B-сплайна, осуществляют приземление БПЛА на мобильную платформу, управляя скоростью и местоположением БПЛА. Обеспечивается повышение точности приземления беспилотного летательного аппарата на мобильную платформу. 3 з.п. ф-лы, 4 ил., 1 табл.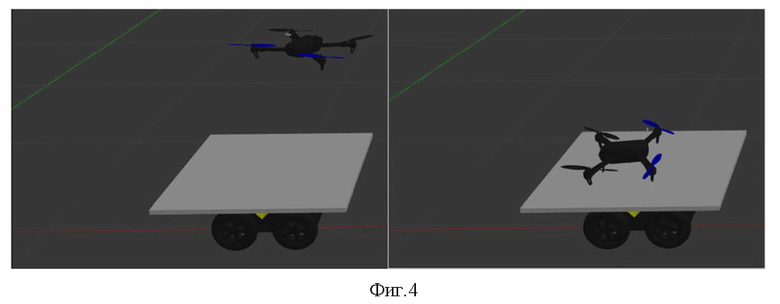
1. Способ автономного приземления беспилотного летательного аппарата на мобильную платформу, основанный на одометрии, включающий автономное перемещение БПЛА за мобильной платформой, использование данных положения и одометрии от мобильной платформы и приземление БПЛА на мобильную платформу при достаточном приближении к ней, отличающийся тем, что извлекают данные местоположения из данных локализации мобильной платформы и используют эти данные для определения местоположения мобильной платформы в глобальной системе координат, далее преобразуют эти данные в системе управления БПЛА и создают его траекторию, используя B-сплайна интерполяцию, при этом БПЛА и мобильная платформа осуществляют непрерывную связь и управление скоростью и местоположением БПЛА.
2. Способ автономного приземления по п.1, отличающийся тем, что система управления беспилотного летательного аппарата использует расширенный фильтр Калмана (EKF) для обработки данных местоположения.
3. Способ автономного приземления по п.1, отличающийся тем, что для создания B-сплайна требовалось не менее четырех контрольных точек, имеющих производные до 3-го порядка.
4. Способ автономного приземления по п.1, отличающийся тем, что преимущественно осуществляют управление скоростью четырехроторного двигателя БПЛА.
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2793982C1 |
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УТОЧНЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2794003C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| CN 110253580 A, 20.09.2019. | |||

