блока 4 задания уставки через пропорционально-интегральный регулятор 5, другие входы блока 4 соединены с командным аппаратом бис датчиком 7 тока тяговых двигателей, и тиристорный преобразователь 8, соединенный с блоком 4 через блок 9 управления. Регулятор 5 состоит из операционного усилителя 10, резистора 11 цепи управляющего воздействия, резистора 12 цепи обратной связи, резистора 13 цепи задающего значения, интегрирующего конденсатора 14, щунтирующего диода 15, потенциометра 16 регулировки порога чувствительности.
При движении электроподвижного состава без боксования или юза схема регулирует ток двигателей 2 под контролем датчика 7 с помощью блока 9 и преобразователей 8 согласно сигнала командного аппарата 6. В блоке 4 происходит сравнение напряжений, соответствующих фактическому значению тока двигателей и заданному командным аппаратом.
При боксовании или юзе на выходе блока 1 сравнения напряжении тяговых двигателей появляется напряжение f/i, пропорциональное избыточной скорости вращения одной из колесных пар. Напряжение Ut преобразуется пропорционально-интегральным регулятором и поступает на вход блока задания уставки, что приводит к снижению тока тяговых двигателей.
Пропорционально-интегральный регулятор работает следующим образом.
На входе усилителя 10 происходит сравнение токов, протекающих через резисторы 11 и 13 под действием напряжения Ui блока сравнения и напряжения С/г. определяющего порог чувствительности устройства. Выходной сигнал пропорционально-интегрального регулятора при нулевых начальных зсловиях:
y.+«.|L)
и, -Rn
t
.(,}dt.
I Rn)
Из уравнения видно, что выходной сигнал пропорционален входному и нарастает с постоянной времени цепи резистора 11, конденсатора 14. Таким образом, независимо от величины сигнала, превышающего порог чувствительности, амплитуда выходного сигнала может достичь значения, снижающето ток уставки тяговых двигателей до нуля.
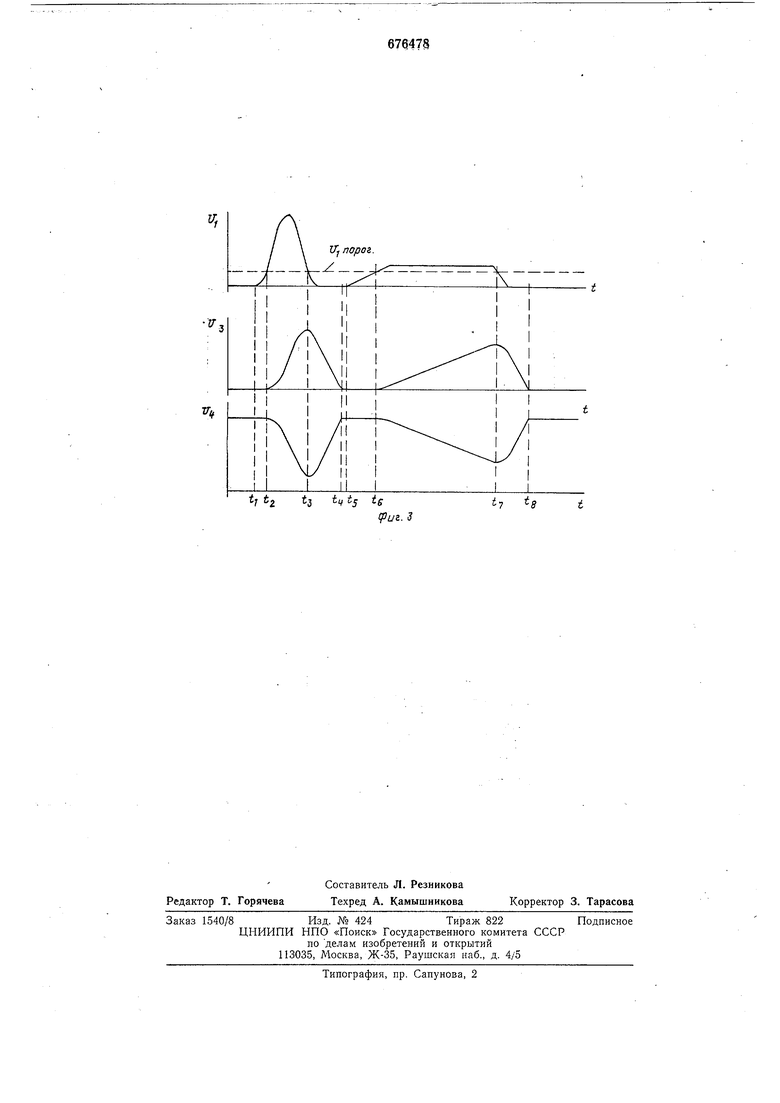
Предлагаемое устройство в моменты ti-4 времени работает следующим образом.
В моменты ti и /5 возникает боксование
и появляется напряжение на выходе блока
1. При превыщении Ui порога чувствительности (моменты 4 и U) происходит пропорционально-интегральное преобразование сигнала. Пропорционально преобразованному сигналу снижается ток тяговых двигателей (напряжение U датчика 7 тока
двигателей). Как видно из диаграмм, снижение напряжения t/з, а следовательно, и увеличение тока начинается в моменты з и t, когда напряжение датчика становится меньще порогового. Преимущество применения пропорционально-интегрального регулятора иллюстрирует боксование с незначительным проскальзыванием колесных пар в интервале моментов времени in-U, где независимо от величины напряжения
Ui уставка тока двигателей снижается до полного прекращения боксования.
Использование пропорционально-интегрального регулятора в цепи преобразователя напряжения t/i исключает возможность установления равновесия сил тяги и сцепления при избыточной скорости вращения одной из колесных пар, что повыщает эффективность устройства автоматического регулирования и уменьшает износ рельс
и бандажей.
Формула изобретения
Устройство для защиты от боксования и юза колесных пар электроподвижного состава, содержащее блок сравнения напряжений тяговых двигателей, соединенный с одним из входовблока задания уставки, другие входы которого соединены с командным аппаратом и с датчиком тока двигателей,
тиристорный преобразователь, соединенный с выходом блока задания уставки через блок управления, отличающееся тем, что, с целью повышения эффективности работы устройства путем обеспечения максимального использования силы тяги по условиям сцепления, оно снабжено пропорционально-интегральным регулятором, вход которого соединен с выходом блока сравнения напряжения тяговых двигателей, а выход - с входом блока задания уставки.
+
гл
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 2019 |
|
RU2739552C1 |
| Способ регулирования силы тяги и торможения электроподвижного состава при автоматическом управлении | 1981 |
|
SU1068305A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ НАГРУЗКИ ТЯГОВЫХ ДВИГАТЕЛЕЙ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1990 |
|
RU2034721C1 |
| Устройство для управления тяговым электроприводом электровоза | 1985 |
|
SU1299850A1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ОТ БОКСОВАНИЯ И ЮЗА КОЛЕСНЫХ ПАР ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1991 |
|
RU2025310C1 |
| Устройство для регулирования тока тяговых двигателей электроподвижного состава | 1981 |
|
SU1008024A1 |
| Устройство для автоматического управления электроподвижным составом | 1977 |
|
SU716888A1 |
| Устройство для автоматического управления электровозом | 1986 |
|
SU1402449A1 |
| СПОСОБ ЗАЩИТЫ ТИРИСТОШОГО ПРЕОБРАЗОВАТЕЛЯ | 1979 |
|
SU826489A1 |
| Способ регулирования сил тяги и торможения электроподвижного состава | 1987 |
|
SU1416346A1 |

Фиг.1
tj iv 5 ie
i ff
pui. J
