Область техники, к которой относится изобретение
Изобретение относится к радиолокационным методам получения информации о воздушных объектах и предназначено для выделения протяженных по азимутальной координате воздушных объектов (ВО) на фоне точечных малоразмерных воздушных объектов. Изобретение может быть использовано в радиолокационных системах и станциях для селекции протяженных по азимутальной координате объектов на фоне точечных.
Уровень техники
Известны способ и устройство радиолокационного распознавания целей разных размеров и конфигурации [1]. Устройство содержит антенну, передатчик, приемник, антенный переключатель и канал распознавания, причем передатчик содержит модулятор, генератор сверхвысокой частоты (СВЧ) и первый ключ, где выход модулятора соединен с первым входом первого ключа и первым выходом передатчика, выход генератора СВЧ соединен со вторым входом первого ключа и вторым выходом передатчика, выход первого ключа является третьим выходом передатчика и соединен с первым входом антенного переключателя, второй вход которого соединен с антенной, а выход - со входом приемника; канал распознавания содержит последовательно соединенные линию задержки, второй ключ, смеситель, фильтр низких частот и устройство воспроизведения образа цели (УВОЦ), причем вход линии задержки является первым входом канала распознавания и соединен с первым выходом передатчика, второй вход смесителя является вторым входом канала распознавания и соединен со вторым выходом передатчика, второй вход второго ключа является третьим входом канала распознавания и соединен со вторым выходом приемника, первый выход передатчика и выход приемника соединены со входами индикатора кругового обзора радиолокационной станции (РЛС).
Способ распознавания основан на том, что в процессе обзора пространства путем сканирования характеристикой направленности антенны по угловой координате (то есть по азимуту) в пространство излучают импульсные зондирующие сигналы, антенной радиолокатора принимают и затем усиливают принятые отраженные воздушными объектами амплитудно-модулированные сигналы, которые после усиления в приемнике смешивают в смесителе с сигналами генератора СВЧ, после чего воздействуют на фильтр нижних частот, пропускающий только сигналы звукового диапазона. Отраженные сигналы анализируют в УВОЦ, где по характеристикам (оттенкам, тембру, гармоникам) звуков определяют тип воздушного объекта, а значит и его геометрические размеры. Данный способ не может быть признан эффективным в части измерения азимутальной (поперечной) протяженности объектов, поскольку УВОЦ основано на использовании головных телефонов, то есть весьма неточных измерителей характеристик звуков. Качество распознавания и определения типажа ВО зависит от индивидуальных способностей операторов, прослушивающих звуки с помощью головных телефонов. Большое многообразие летательных аппаратов не позволяет эффективно отличать их по характеристикам звуков. А для вновь появившихся, не использованных ранее воздушных объектов подобные характеристики вообще являются неизвестными, что не позволяет проводить распознавание (определение типа объекта).
На практике подавляющее большинство реальных ВО относится к классу сложных радиолокационных объектов. Погрешности измерения координатных параметров, вызванных шумом объекта, начинают возникать, когда физические размеры ВО превышают 0,01 величины элемента разрешения по какой-либо координате [2, с. 17-18]. Практика показывает, что с уменьшением дальности до воздушного объекта его следует считать протяженным по угловым координатам. Таким образом, находя отношение физических размеров ВО к величине элемента разрешения по какой-либо координате, можно судить о протяженности ВО по данной координате. Величина элемента разрешения по угловой координате определяется шириной характеристики направленности антенны Θа.
С учетом вышесказанного в [3] предложен способ селекции протяженных по угловой координате (то есть по азимуту) воздушных объектов на фоне точечных, заключающийся в том, что в процессе обзора пространства путем сканирования характеристикой направленности антенны по угловой координате (то есть по азимуту) излучают в пространство (в направлении ВО) радиолокационные сигналы, принимают отраженные сигналы, усиливают их по мощности и проводят их обработку в каждом периоде повторения с помощью согласованного фильтра, измеряют ширину Θво характеристики направленности антенны при наличии воздушного объекта, определяют (фиксируют) величину увеличения ширины характеристики направленности антенны (ХНА) ΔΘво=Θво-Θа, где Θа - значение определяемой конструкцией антенной системы стандартной ширины ХНА, определяют отношение β=ΔΘво/Θа, а затем принимают решение при β≥0,01 о наличии протяженного по угловой (азимутальной) координате воздушного объекта, а при β<0,01 - о наличии точечного по угловой (азимутальной) координате ВО.
Данный способ не может быть признан эффективным и реализуемым, поскольку не существует устройства или метода определения факта увеличения ширины ХНА. Ширина ХНА является параметром антенной системы и от размеров ВО не зависит [4, 5]. А если бы такой метод существовал, то и он не помог бы реализации способа [3], поскольку на пути линии визирования антенны могут находиться несколько воздушных объектов на разной дальности, и все они участвовали бы в расширении луча ХНА. При этом все эти ВО не обязательно являлись бы протяженными, то есть эти ВО по угловой протяженности могут быть любыми.
Раскрытие сущности изобретения
Задачей изобретения является разработка более совершенного и перспективного способа селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов на основе подсчета числа превысивших по амплитуде порог обнаружения импульсов, отраженных объектом на фиксированной дальности в период прохождения характеристикой направленности антенны смежных азимутальных секторов обзора.
Решение указанной задачи основано на следующей идее: анализировать отраженные объектами сигналы не только по мере поворота ХНА, но и применяя стробирование по дальности, а также используя более детальный анализ отражений, превышающих порог обнаружения.
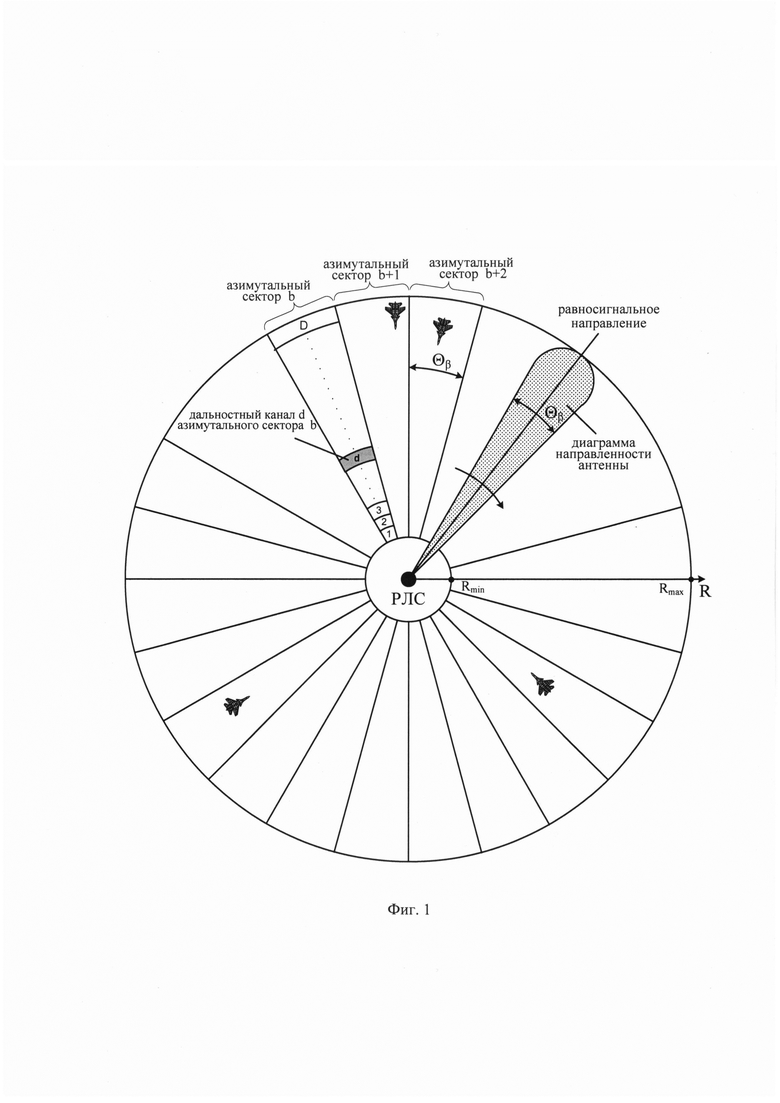
Для решения поставленной задачи предлагается изменить содержание существующего способа следующим образом. В процессе обзора пространства путем сканирования характеристикой направленности антенны по азимуту излучают с помощью антенны радиолокатора в пространство импульсные сигналы с линейной частотной модуляцией (ЛЧМ), принимают отраженные линейно частотно-модулированные сигналы (ЛЧМ-сигналы), усиливают их по мощности и последовательно обрабатывают в каждом периоде повторения с помощью согласованного фильтра. Для удобства проведения процедуры оценки азимутальной протяженности ВО виртуально разбивают изображенную на фиг. 1 зону обнаружения радиолокатора (область пространства вокруг радиолокационной станции, ограниченная по дальности ближней и дальней границами зоны обнаружения, в которой при отсутствии преднамеренных помех обеспечивается обнаружение воздушных целей с вероятностью не ниже заданной) на В=2π/Θβ азимутальных секторов, где Θβ - ширина характеристики направленности антенны в азимутальной плоскости [рад], и D=2(Rmax-Rmin)ΔF/c дальностных каналов, где Rmin и Rmax - дальности до ближней и дальней границ зоны обнаружения, ΔF - девиация частоты ЛЧМ-сигнала, с - скорость распространения электромагнитных волн, причем ΔF=1/τсж, где τсж - длительность сжатого согласованным фильтром приемника радиолокатора отраженного ЛЧМ-сигнала. В каждом периоде Ти повторения импульсов на выходе приемной системы радиолокатора, заканчивающейся согласованным фильтром, последовательно фиксируют с помощью аналого-цифрового преобразователя (АЦП) амплитуду сжатого отраженного (выходного) ЛЧМ-сигнала с интервалом Δtд дискретизации, равным половине длительности сжатого сигнала τсж/2 и рассчитываемым по формуле Δtд=τсж/2=1/(2ΔF). Значения амплитуд сжатых отраженных сигналов, принадлежащих одинаковым дальностным каналам, в пределах времени одного полного оборота ХНА (периода обзора) объединяют и последовательно в соответствии с временем приема записывают в соответствующие d-e генеральные массивы Gd, где d - номер дальностного канала, причем  . Учитывая и зная точное время приема отраженных сигналов каждого периода, а также их соответствие определенному азимутальному положению антенны РЛС, выделяют из каждого d-го генерального массива Gd частные массивы gdb, элементы которых соответствуют амплитудам отраженных сигналов в d-х каналах дальности в b-х азимутальных секторах. При этом число N отраженных сигналов в каждом частном массиве gdb d-го дальностного канала b-го азимутального сектора будет равно N=Θβ/(ωβТи), где ωβ - угловая скорость вращения антенны РЛС [рад/с].
. Учитывая и зная точное время приема отраженных сигналов каждого периода, а также их соответствие определенному азимутальному положению антенны РЛС, выделяют из каждого d-го генерального массива Gd частные массивы gdb, элементы которых соответствуют амплитудам отраженных сигналов в d-х каналах дальности в b-х азимутальных секторах. При этом число N отраженных сигналов в каждом частном массиве gdb d-го дальностного канала b-го азимутального сектора будет равно N=Θβ/(ωβТи), где ωβ - угловая скорость вращения антенны РЛС [рад/с].
Однако амплитуда соответствующего отраженного сигнала будет превышать порог обнаружения только в том случае, если на пути следования соответствующего излученного РЛС импульсного ЛЧМ-сигнала встретится искусственный объект отражения радиоволн (воздушный объект). Если подобный ВО будет точечным по азимутальной координате (с малой азимутальной протяженностью), то число подряд зафиксированных АЦП отраженных сигналов, превысивших порог обнаружения П1, будет равно N. При увеличенных размерах ВО по азимуту число подряд следующих и превышающих порог П1 отраженных сжатых ЛЧМ-сигналов в d-м дальностном канале (в массиве Gd d-го дальностного канала) будет превышать N. Под подряд следующими понимают следующие друг за другом без пропусков элементы массива, объединенные общим свойством, в данном случае - содержащие значение (амплитуду отраженного сигнала), превышающее порог обнаружения П1. Учитывая вышесказанное, согласно предлагаемому способу последовательно объединяют в массивы Mdb значения смежных по номеру азимутального сектора [b-й и (b+1)-й, (b+1)-й и (b+2)-й, (b+2)-й и (b+3)-й… (В-1)-й и В-й] элементы массивов в пределах d-го канала дальности, а затем проводят в этих объединенных массивах Mdb подсчет числа подряд следующих элементов, записанные значения в которых превышают порог обнаружения П1. При наличии в каком-либо массиве Mdb более N подряд следующих элементов, превышающих порог обнаружения П1, принимают решение о нахождении в b-м азимутальном секторе на d-й дальности протяженного по азимутальной координате воздушного объекта на фоне точечных малоразмерных воздушных объектов.
Как видно из описания предлагаемого способа, он более эффективен, нежели прототип [3], поскольку при наличии разных ВО в одном азимутальном направлении на различных дальностях решения об азимутальной протяженности каждого ВО принимают независимо друг от друга с учетом дальности каждого ВО и отдельно в отношении каждого из них.
Краткое описание чертежей
Сущность изобретения поясняется с помощью фигур, где
- на фиг. 1 изображена зона обнаружения РЛС (радиолокатора), разделенная на азимутальные сектора, равные по размеру ширине ХНА РЛС Θβ. Каждый из азимутальных секторов разделен на D дальностных каналов, в которых проводят обнаружение ВО. Дальностные каналы пронумерованы от ближней Rmin до дальней Rmax границ зоны обнаружения РЛС;
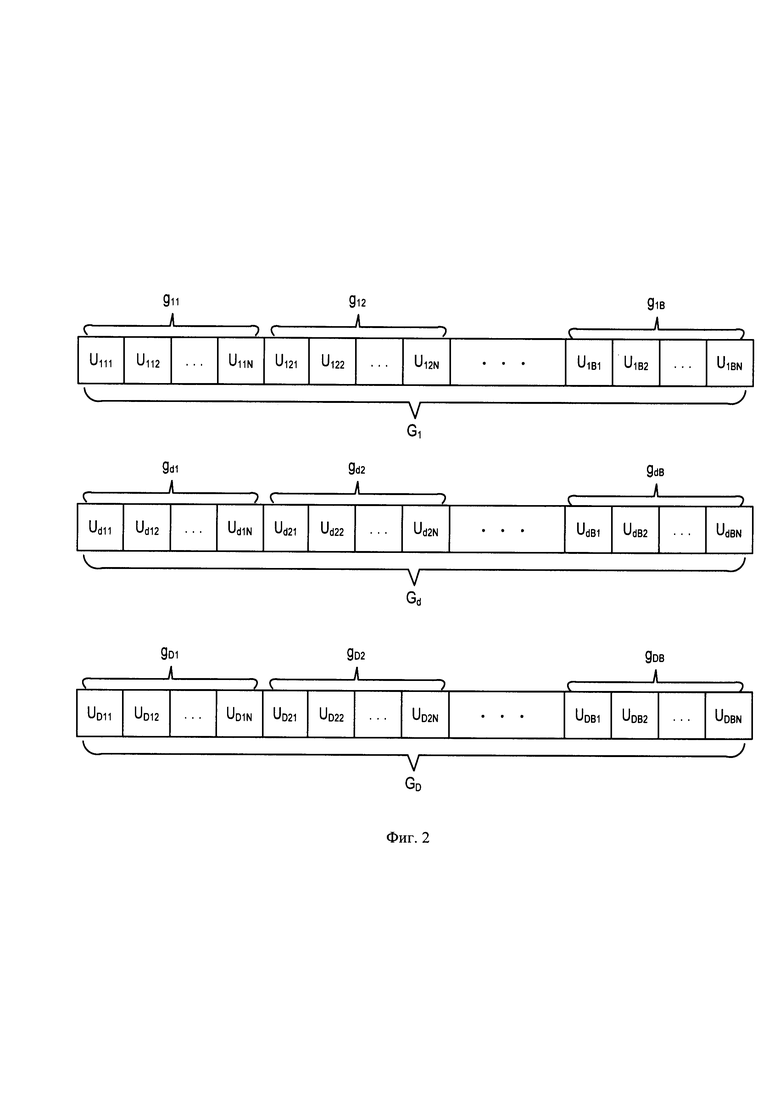
- на фиг. 2 показаны структуры формируемых (в процессе обработки и обнаружения) генеральных массивов G1, Gd и GD данных об отраженных сигналах, соответствующих первому, d-му и D-му каналам дальности. Каждый из генеральных массивов разделен на В частных массивов по числу азимутальных секторов. В ячейках массивов записаны амплитуды отраженных сигналов Udbn, где d - номер дальностного канала, b - номер азимутального сектора, n - номер периода повторения импульсов, укладывающихся в пределах интервала прохождения равносигнальным направлением ХНА угловой ширины азимутального сектора;
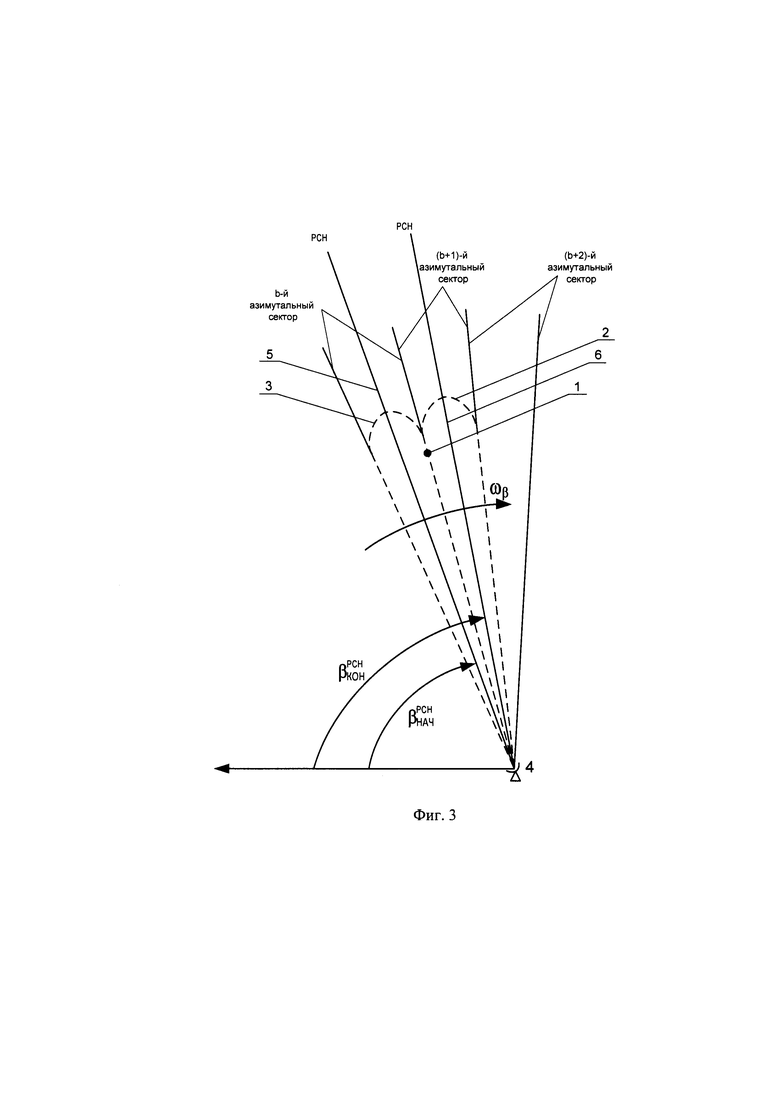
- на фиг. 3 показаны положения диаграмм направленности антенны РЛС 4 при их нахождении в b-м и (b+1)-м азимутальных секторах. Равносигнальные направления (РСН) ХНА соответствуют азимутам (в системе координат радиолокатора)  и
и  , подразумевающим начальное и конечное азимутальные положения. Воздушный объект 1 находится на границе или стыке b-го и (b+1)-го азимутальных секторов. Диаграммы направленности, показанные пунктиром, имеют обозначения 3 и 2;
, подразумевающим начальное и конечное азимутальные положения. Воздушный объект 1 находится на границе или стыке b-го и (b+1)-го азимутальных секторов. Диаграммы направленности, показанные пунктиром, имеют обозначения 3 и 2;
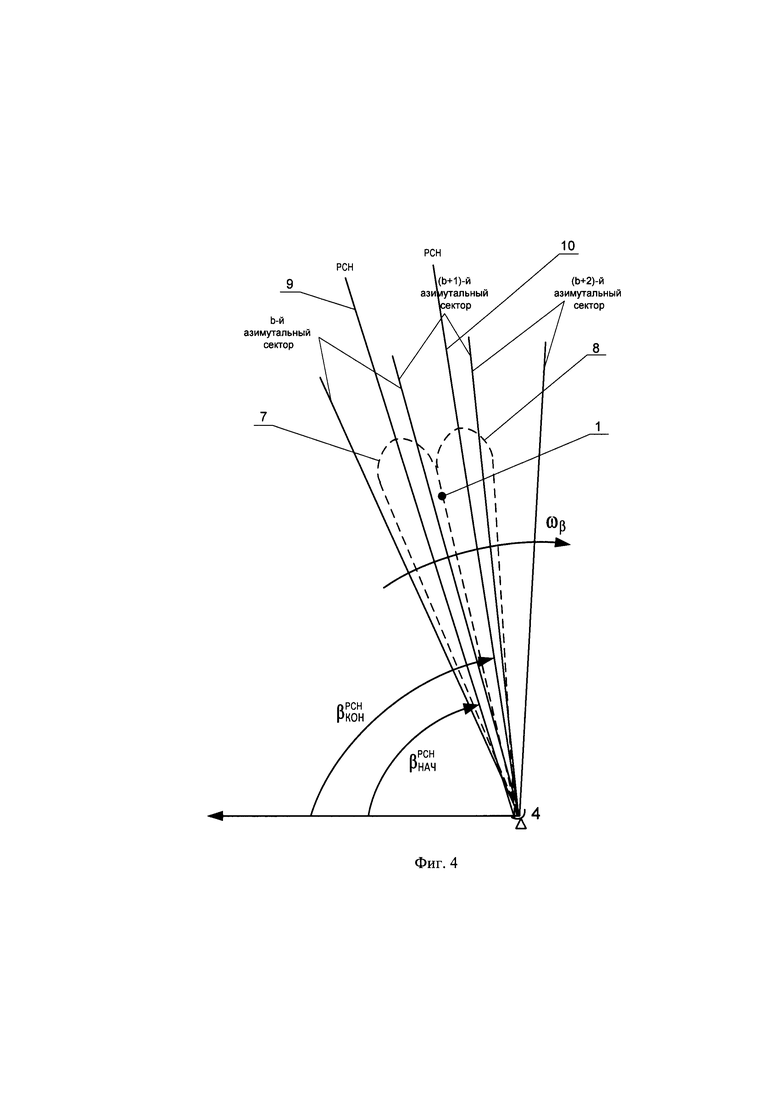
- на фиг. 4 показаны положения диаграмм направленности 7 и 8, касающихся своими границами ВО 1 при его нахождении в глубине (b+1)-го азимутального сектора. Эти диаграммы направленности имеют РСН 9 и 8 соответственно;
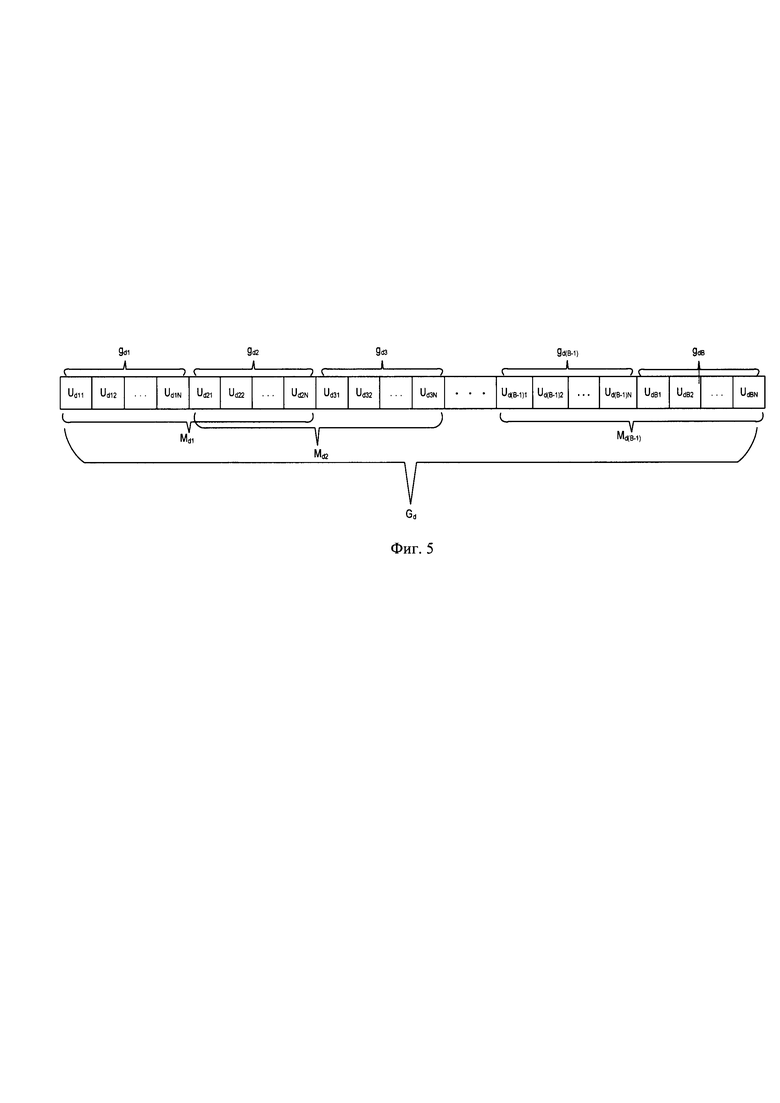
- на фиг. 5 показан порядок объединения элементов частных массивов в парные. Так элементы частных массивов gd1 и gd2 образуют парный массив Md1. Все подобные объединения проводятся в пределах генерального массива Gd отражений в d-м канале дальности;
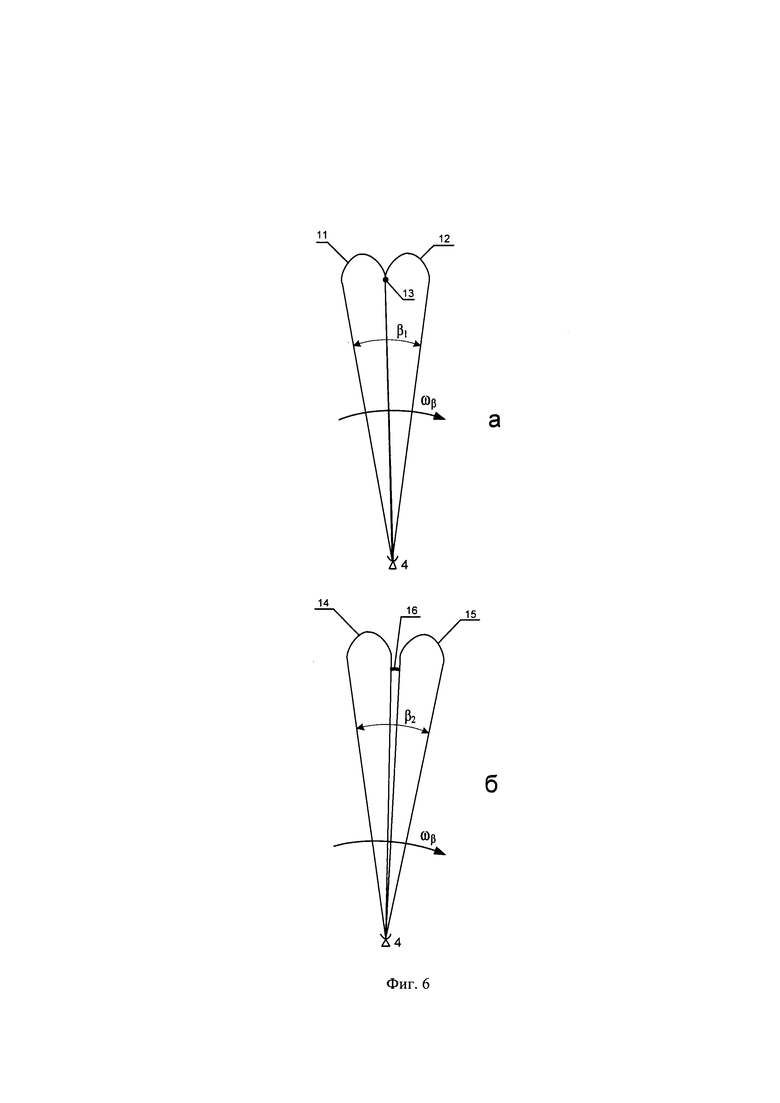
- на фиг. 6 показаны начальное и конечное положения диаграмм направленности при контакте с малоразмерным точечным ВО 13 (фиг. 6а) и воздушным объектом 16 повышенной азимутальной протяженности (фиг. 6б). Общий азимутальный сектор контакта с ВО разных размеров имеет обозначение β1 (а) и β2 (б) соответственно.
Осуществление изобретения
Сущность изобретения заключается в следующем. При обзоре пространства методом сканирования движущаяся ХНА радиолокатора последовательно касается находящихся на удалении ВО разными элементами занимаемого ею пространственного объема. Эффективное отражение радиоволн происходит при касании объектов характеристикой направленности на уровне половинной мощности и более высоком по мощности уровне. Поскольку угловая величина (ширина) ХНА составляет от долей до единиц градусов, то при пересечении объекта характеристикой направленности в приемной системе РЛС формируется пачка отраженных сигналов. Количество принятых сигналов в составе такой пачки растет при уменьшении периода повторения импульсов Ти, снижении угловой скорости поворота ХНА и увеличении угловых размеров отражающего объекта. При описании умышленно говорится о повороте ХНА, а не самой антенны, поскольку сканирование по азимуту может осуществляться как механическим, так и электронным способом с использованием цифровой антенной решетки.
При этом отраженные сигналы на выходе приемной системы РЛС возникают независимо от дальности до ВО. То есть пачка отраженных сигналов может содержать отражения от нескольких объектов, находящихся на разных дальностях. И если эти ВО будут незначительно отличаться по дальности и азимутальному положению, то в пачке отраженных сигналов будут присутствовать принятые усиленные радиоимпульсы, переотраженные разными ВО. В подобных ситуациях по длительности или составу пачки невозможно оценивать азимутальную протяженность объектов. Вот почему согласно предлагаемому способу отраженные сигналы объединяют в массивы, соответствующие определенной (конкретной) дальности. Это исключает возможность объединения подлежащих анализу отражений от ВО, расположенных на разных дальностях.
На фиг. 2 показаны структуры генеральных массивов G первого, d-го и D-го каналов дальности (D - номер канала, соответствующий наибольшей дальности). Заметно, что массив Gd состоит из В частных массивов gdb, где индекс «b» означает принадлежность к b-му азимутальному сектору. В каждом частном массиве могут быть записаны (сохранены) амплитуды N отраженных сигналов. Даже если ВО на d-й дальности сектора отсутствует, на выходе приемной системы все равно будет зафиксирован сигнал амплитудой Udbn, где n - номер отраженного сигнала в пачке из N сигналов b-го азимутального сектора d-го канала дальности. Уровень такого сигнала не будет превышать порог обнаружения П1. В случае же отражения от ВО принятый антенной РЛС сигнал должен превысить порог обнаружения П1.
Еще раз отметим, что в каждом частном массиве предусмотрено N ячеек для записи амплитуд сигналов, принятых с интервалом, равным периоду повторения импульсов Ти. Так в В-м частном массиве g1B первого дальностного канала будут записаны отраженные сигналы U1B1, U1B2,…, U1Bn,…, U1BN. Последний сигнал U1BN соответствует первому дальностному каналу (d=1), В-му азимутальному сектору и N-му периоду повторения сигналов, излучаемых РЛС при прохождении характеристикой направленности на уровне половинной мощности В-го азимутального сектора. Сигнал U1BN является последним в частном массиве g1B генерального массива G1. Аналогичный сигнал UdBN является последним в частном массиве gdB генерального массива Gd. Для максимальной дальности будет зафиксирован генеральный массив GD, состоящий из В частных массивов gD1, gD2,…, gDb,…, gDB.
Число дальностных каналов D определяется разностью ΔRРЛС между дальней Rmax и ближней Rmin границами зоны обнаружения (ΔRPЛC=Rmax-Rmin), а также длительностью τсж сжатого ЛЧМ-сигнала на выходе согласованного фильтра. Длительность τсж при линейной частотной модуляции обратно пропорциональна [6] девиации частоты ΔF (τсж=1/ΔF). А по критерию Рэлея два одинаковых импульсных сигнала могут быть разрешены по времени при сдвиге между ними, равном половине длительности одного из них. Значит, период дискретизации по времени для раздельного наблюдения двух разрешаемых по времени (а значит и по дальности) сигналов должен быть равен половине длительности сжатого ЛЧМ-сигнала (τсж/2). Интервал дискретизации ΔtД при цифровой обработке отраженных сигналов обратно пропорционален частоте дискретизации Fд. Значит Δtд=τсж/2=1/Fд=1/(2ΔF). Отсюда частота дискретизации Fд должна быть вдвое больше девиации частоты AF ЛЧМ-сигнала. Это согласуется с известным утверждением о том, что величина элемента разрешения по дальности δR обратно пропорциональна удвоенной девиации частоты ЛЧМ-сигнала [7-9].
Оценим требуемые параметры зондирования для реализации предлагаемого способа. Для того, чтобы вся энергия сигнала, отраженного от ВО, могла бы быть сосредоточена в одном сжатом ЛЧМ-импульсе на выходе согласованного фильтра сжатия, длительность сжатого сигнала τсж должна быть не менее пространственной протяженности ВО. Современные ВО даже крупных размеров имеют линейный разнос эффективных отражателей радиоволн [10] не более 40 м. Пусть пространственная протяженность сжатого импульса равняется 40 м. Пространственная протяженность ΔR равная 40 м соответствует длительности сжатого импульса, включающего отражения от всех объектов отражения радиоволн в пределах 40 м,
τсж=ΔR/c=40/(3×108)≈0,135×10-6 с≈0,135 мкс.
Для получения длительности сжатого сигнала 0,135 мкс требуется девиация частоты ΔF=1/τсж=7,4×106 Гц=7,4 МГц.
Частоту дискретизации АЦП на выходе фильтра сжатия целесообразно в данном случае выбирать равной Fд=2ΔF=14,8 МГц, что вполне выполнимо.
Тогда рекомендуемая длительность зондирующего ЛЧМ-сигнала τзонд будет определяться коэффициентом сжатия используемого согласованного фильтра Ксж. Так при выборе Ксж=50 τзонд=τсж×Ксж=0,135×10-6×50=6,75 мкс, а при выборе Ксж=30 τзонд=4 мкс.
При уточнении или изменении требований к разрешению представленные параметры изменяются пропорционально и на возможность реализации предлагаемого способа существенно не влияют.
Что касается возможности надежного обнаружения отраженных сигналов на фоне шумов с порогом обнаружения, превышающим средний уровень шума, то обработка данных реальных натурных экспериментов с ВО [11-14] привела к следующему выводу: использование девиации частоты ЛЧМ-сигнала порядка ΔF≈1 МГц обеспечивает при цифровой согласованной фильтровой обработке рост отношения сигнал-шум на величину порядка 13-15 дБ. Этого достаточно для того, чтобы каждый отдельный отраженный сигнал типового для определенного радиолокатора ВО мог автономно превышать порог обнаружения.
Согласованную фильтрацию и сжатие ЛЧМ-сигнала можно в данном случае проводить как в аналоговом, так и в цифровом виде. При цифровой фильтрации отраженных сигналов частоту дискретизации следует выбирать так, чтобы обеспечивалась фиксация импульса не менее чем в 20-30 точках.
При максимальной дальности обнаружения 100 км и мертвой зоне 2 км ΔRРЛС=98 км при величине элемента разрешения по дальности δR=20 м требуемое число дальностных каналов будет равно 4900. При ширине ХНА 1,5° число В азимутальных секторов будет равно 240. Тогда общее число частных массивов для реализации способа будет равно 240×4900=1176000.
Рассмотрим порядок формирования пачек отраженных сигналов, подлежащих анализу для селекции объектов с большой протяженностью по азимутальной координате. Для этого рассмотрим фиг. 3, на которой демонстрируется ситуация нахождения ВО 1 на границе b-го и (b+1)-го азимутальных секторов. Отраженные сигналы начинают поступать в приемную систему РЛС 4 при касании ВО 1 правой границей ХНА 3 при вращении антенны РЛС 4 по часовой стрелке с угловой скоростью ωβ. Можно заметить, что диаграмма направленности (ДН) 3, являясь графическим изображением характеристики направленности, начинает касаться ВО 1 при азимуте (начальном) равносигнального направления (РСН) 5 равном  . Отраженные сигналы закончат поступать в приемник РЛС 4 с достаточной для обнаружения амплитудой в момент, когда РСН 6 ДН 2 (это та же самая ДН, но переместившаяся на величину, равную ширине ХНА Θβ будет иметь конечный азимут
. Отраженные сигналы закончат поступать в приемник РЛС 4 с достаточной для обнаружения амплитудой в момент, когда РСН 6 ДН 2 (это та же самая ДН, но переместившаяся на величину, равную ширине ХНА Θβ будет иметь конечный азимут  . Все время, пока правая граница ДН будет находиться в пределах (b+1)-го азимутального сектора, в приемную систему РЛС 4 будут поступать отраженные ВО 1 сигналы. В момент, когда левая граница ДН 2 выйдет из контакта с ВО 1, поступление отраженных сигналов в приемную систему РЛС 4 прекратится.
. Все время, пока правая граница ДН будет находиться в пределах (b+1)-го азимутального сектора, в приемную систему РЛС 4 будут поступать отраженные ВО 1 сигналы. В момент, когда левая граница ДН 2 выйдет из контакта с ВО 1, поступление отраженных сигналов в приемную систему РЛС 4 прекратится.
Условимся считать, что отраженные сигналы имеют принадлежность к какому-либо b-му азимутальному сектору, пока правая граница ДН находится в пределах этого же азимутального сектора.
Итак, отражения от ВО 1 начнут фиксироваться радиолокатором и закончат им фиксироваться соответственно при входе правой границы ДН 3 в (b+1)-й азимутальный сектор и выходе левой границы ДН 2 из b-го азимутального сектора. Это соответствует ситуации нахождения ВО на границе раздела b-го и (b+1)-го азимутальных секторов. При таком варианте расположения ВО отраженные сигналы будут записаны в ячейки (b+1)-го частного массива gd(b+1) отражений на d-й дальности. Если же ВО будет находиться в пределах (b+1)-го азимутального сектора, как показано на фиг. 4, то фиксация отраженных сигналов начнется при таком положении ДН 7, когда ее правая граница уже находится в глубине (b+1)-го азимутального сектора РЛС 4. Закончится фиксация, когда правая граница ДН 8 (это та же самая ДН, но переместившаяся в положение 8) будет находиться в глубине (b+2)-го азимутального сектора. Следовательно, отраженные сигналы будут зафиксированы не в одном, а в двух частных массивах: gd(b+1) и gd(b+2) d-го дальностного канала. Индекс «d» в данном случае употреблен в том смысле, что это может быть любой дальностный канал, в котором окажется ВО. Главное то, что эти два частных массива являются смежными в пределах одного и того же генерального массива Gd. Попадание отраженных ВО сигналов в разные частные массивы являться наиболее общим случаем, проявляющимся наиболее часто, то есть наиболее вероятным случаем. Это обосновывает и объясняет предложение использовать для подсчета числа подряд следующих зафиксированных отраженных сигналов смежные частные массивы, а точнее - каждую пару смежных частных массивов в каждом генеральном массиве. Это вторая особенность способа селекции.
Таким образом, элементы каждой пары смежных массивов определенного дальностного канала объединяют в соответствующий «парный» массив Mdb для последующего подсчета в нем числа подряд следующих элементов, превышающих своими величинами порог обнаружения П1. Так, например, для первого дальностного канала (то есть для первого генерального массива G1) частные массивы g11 и g12 объединятся в массив М11, частные массивы g12 и g13 объединятся в массив М12, частные массивы g13 и g14 объединятся в массив М13 и так далее до последнего этапа, в котором массивы g1(B-1) и g1B объединятся в массив M1(B-1). Для d-го дальностного канала (фиг. 5) частные массивы gd1 и gd2 объединятся в массив Md1, частные массивы gd2 и gd3 объединятся в массив Md2, частные массивы gd3 и gd4 объединятся в массив Md3 и так далее до последней пары частных массивов gd(B-1) и gdB генерального массива Gd, которые объединяют (см. фиг. 5) в массив Md(B-1).
Поскольку время приема любого отраженного сигнала известно и однозначно связано с положением РСН ХНА РЛС, то по времени приема первого и последнего импульса пачки подряд следующих отражений всегда можно определить соответствующие азимутальные положения РСН антенны  и
и  (см. фиг. 3, 4). Зная азимутальные координаты РСН ДН в моменты начала (индекс «нач») и конца (индекс «кон») приема отраженных сигналов, превысивших порог обнаружения П1 после сжатия, можно вычислить азимут βво обнаруженного ВО по формуле:
(см. фиг. 3, 4). Зная азимутальные координаты РСН ДН в моменты начала (индекс «нач») и конца (индекс «кон») приема отраженных сигналов, превысивших порог обнаружения П1 после сжатия, можно вычислить азимут βво обнаруженного ВО по формуле:
 .
.
Третья особенность предложенного способа заключается в учете увеличения длительности пачки отраженных сигналов при увеличении азимутальной протяженности ВО. Это объясняется (подтверждается) расширением величины сектора взаимодействия ХНА с ВО, в пределах которого в приемной системе РЛС должны появляться отраженные сигналы, превышающие порог обнаружения П1. Факт такого расширения демонстрируется с помощью фиг. 6. Рассматривая фиг. 6а, можно заключить, что при малых угловых размерах ВО 13 начальное и конечное положения ДН, при которых будут фиксироваться отраженные сигналы, соответствуют позициям 11 и 12, примыкающим друг к другу. Если же ВО 16 (фиг. 6б) является протяженным по азимутальной координате, то есть отличающимся по азимутальной протяженности от точечного малоразмерного воздушного объекта, то между начальным и конечным положениями ДН 14 и 15 образуется азимутальный пропуск, и угол фиксации отраженных сигналов β2 становится больше соответствующего угла β1 при обнаружении малоразмерного точечного ВО 13. Чем больше угол Р фиксации отражений, тем большее число М сжатых отраженных ЛЧМ-сигналов будет записано в генеральный массив Gd. Сравнение числа М превысивших порог П1 обнаружения сигналов с числом N отражений от элементарного точечного ВО позволяет селектировать протяженный по азимуту объект. Признаком увеличенной азимутальной протяженности ВО является факт превышения числом М подряд зафиксированных отраженных сигналов, превышающих порог П1 и записанных в генеральный массив G, числа N. То есть факт превышения числом М числа N (M>N) является критерием селекции ВО с большой азимутальной протяженностью на фоне точечных малоразмерных ВО.
Таким образом, разработан более совершенный и перспективный способ селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов на основе подсчета числа превысивших по амплитуде порог обнаружения импульсов, отраженных объектом на фиксированной дальности в период прохождения характеристикой направленности антенны смежных азимутальных секторов обзора. При этом способ позволяет принимать решение индивидуально по каждому из нескольких ВО независимо от их взаимного расположения в пространстве.
Способ может быть реализован в типовых радиолокационных станциях с ЛЧМ-модуляцией и рекомендован для радиолокационных систем, проводящих классификацию объектов с учетом их геометрических размеров.
Источники информации
1. Небабин В.Г., Сергеев В.В., Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984. С. 36-37 (аналог).
2. Радиолокационные характеристики летательных аппаратов / М.Е. Варганов, Ю.С. Зиновьев, Л.Ю. Астанин и др.; под ред. Л.Т. Тучкова. М.: Радио и связь, 1985. 236 с.
3. Патент РФ №2410714. G01S 13/50. Способ распознавания протяженной по угловой координате цели и устройство для его осуществления. Винокуров В.И., Винокуров Д.В. Заявка №2009116040. Заявл. 27.04.2009. Опуб. 27.01.2011. Бюл. 3 (прототип).
4. Зырянов Ю.Т., Федюнин П.А., Белоусов О.А. и др. Антенны. Учебное пособие для бакалавров и магистрантов. Тамбов: ФГБОУ ВПО «ТГТУ», 2014. 128 с.
5. Белоцерковский Г.Б. Основы радиотехники и антенны. В двух частях. Часть 2. Антенны. М., Сов. Радио. 1969. 328 с.
6. Финкельштейн М.И. Основы радиолокации. М., Сов. радио. 1973. 496 с.
7. Охрименко А.Е. Основы радиолокации и радиоэлектронная борьба. Ч. 1. Основы радиолокации. М.: Воениздат, 1983. 456 с.
8. Бартон Д.К., Вард Г.Р. Справочник по радиолокационным измерениям. Пер. с англ. - М.: Сов. Радио. 1976. 392 с.
9. Радиоэлектронные системы: Основы построения и теория. Справочник / Под ред. Я.Д. Ширмана. М., Радиотехника. 2007. 512 с.
10. Криспин мл., Маффетт. Оценка радиолокационного поперечного сечения тел сложной формы // ТИИЭР, 1965. Т. 53. №8. С.1115-1125.
11. Митрофанов Д.Г. Экспериментальные исследования параметров траекторных нестабильностей полета воздушных объектов. Воронеж. НПФ «САКВОЕЕ» ООО. Сборник докладов XV международной конференции «RLNC-2009». 2009. С. 1536-1547.
12. Митрофанов Д.Г., Прохоркин А.Г., Бортовик В.В. и др. Возможность выделения информации об угловой скорости поворота воздушного объекта по последовательности отраженных сигналов. Москва. ИРЭ имени B.А. Котельникова РАН. Журнал Радиоэлектроники. №12. 2011. Электронный ресурс.
13. Митрофанов Д.Г. Оценка сходимости формы характеристики изрезанности с законом изменения угловой скорости поворота летательного аппарата. Москва. Труды РНТО РЭС им. А.С. Попова. 14-я международная конференция и выставка DSPA-2012. Серия: Цифровая обработка сигналов и ее применение. Выпуск XIV-1. 2012. С. 210-213.
14. Митрофанов Д.Г. Изучение отличительных спектральных признаков, характеризующих поперечную архитектуру объектов. Москва. Труды РНТО РЭС им. А.С. Попова. 16-я международная конференция DSPA-2014. Серия: Цифровая обработка сигналов и ее применение. Выпуск XVI-1. 2014. C. 314-318.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2023 |
|
RU2821381C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ В ОБЗОРНЫХ РАДИОЛОКАТОРАХ ЗА СЧЕТ ИСПОЛЬЗОВАНИЯ КОГЕРЕНТНЫХ СВОЙСТВ ОТРАЖЕННЫХ СИГНАЛОВ | 2009 |
|
RU2416105C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| СПОСОБ ПОЛЯРИМЕТРИЧЕСКОЙ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2020 |
|
RU2769970C1 |
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2738041C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| РЛС распознавания целей | 2019 |
|
RU2720355C1 |
Изобретение относится к радиолокационным методам получения информации о воздушных объектах и предназначено для выделения воздушных объектов (ВО) большой азимутальной протяженности. Техническим результатом изобретения является разработка способа селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов на основе подсчета числа превысивших по амплитуде порог обнаружения импульсов, отраженных объектом на фиксированной дальности в период нахождения характеристики направленности антенны (ХНА) в смежных азимутальных секторах обзора. В заявленном способе в процессе обзора пространства путем сканирования ХНА по азимуту записывают для каждой дальности и каждого наперед назначенного азимутального сектора частные массивы отраженных сигналов, а затем анализируют в каждой паре смежных по номеру азимутального сектора массивов число М подряд зафиксированных отраженных сигналов, превысивших порог обнаружения. Для отслеживания превышения отраженными радиоимпульсами порога обнаружения используют сигналы с линейной частотной модуляцией и сжатие этих сигналов в согласованном фильтре. Критерием принадлежности к объектам с большой азимутальной протяженностью является факт наличия в смежной паре отражений числа М подряд следующих отраженных сжатых импульсов, превышающих порог обнаружения, которое больше числа  где ωβ - угловая скорость поворота ХНА,
где ωβ - угловая скорость поворота ХНА,  - ширина ХНА радиолокатора, Ти - период повторения импульсов. 6 ил.
- ширина ХНА радиолокатора, Ти - период повторения импульсов. 6 ил.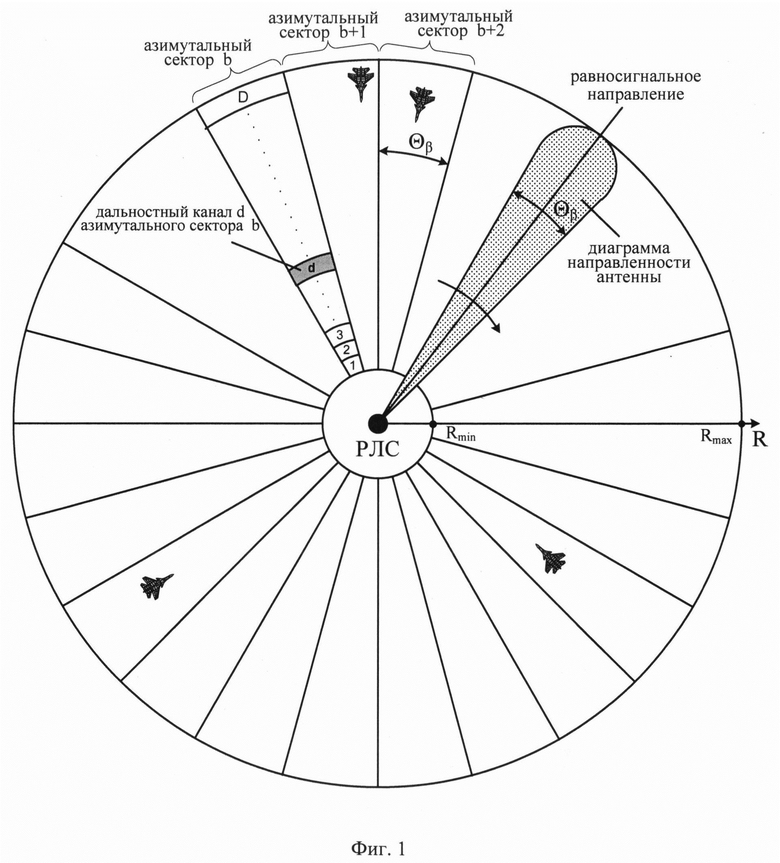
Способ селекции протяженных по азимутальной координате воздушных объектов на фоне точечных малоразмерных воздушных объектов, заключающийся в том, что в процессе обзора пространства путем сканирования характеристикой направленности антенны по азимуту излучают с помощью антенны радиолокатора в пространство импульсные сигналы, принимают отраженные сигналы, усиливают их по мощности и последовательно обрабатывают в каждом периоде повторения с помощью согласованного фильтра, отличающийся тем, что для излучения используют сигналы с линейной частотной модуляцией с девиацией частоты ΔF порядка единиц мегагерц, разбивают зону обнаружения радиолокатора на В=2π/Θβ азимутальных секторов и D=2(Rmax-Rmin)ΔF/c дальностных каналов, где Θβ - ширина характеристики направленности антенны в азимутальной плоскости, Rmin и Rmax - дальности до ближней и дальней границ зоны обнаружения, с - скорость распространения электромагнитных волн, в каждом периоде Ти повторения импульсов на выходе приемной системы радиолокатора, заканчивающейся согласованным фильтром, последовательно фиксируют с помощью аналого-цифрового преобразователя амплитуду сжатого отраженного линейного частотно-модулированного сигнала с интервалом Δtд дискретизации, равным половине длительности сжатого сигнала τсж/2 и рассчитываемым по формуле Δtд=1/(2ΔF), оцифрованные значения амплитуд сжатых отраженных сигналов, принадлежащих одинаковым дальностным каналам в пределах времени одного полного оборота характеристики направленности антенны, последовательно в соответствии с временем приема записывают в соответствующие d-e генеральные массивы Gd, где d - номер дальностного канала, причем  , зная точное время приема каждого отраженного сигнала каждого периода, а также его соответствие определенному азимутальному положению антенны радиолокатора, выделяют из каждого d-го генерального массива Gd частные массивы gdb, элементы которых соответствуют амплитудам отраженных сигналов в d-x каналах дальности в b-х азимутальных секторах, при этом учитывают, что число N отраженных сигналов в каждом частном массиве gdb d-го дальностного канала b-го азимутального сектора будет равно N=Θβ/(ωβТи), где ωβ - угловая скорость поворота характеристики направленности антенны радиолокатора, последовательно объединяют в массивы Mdb значения элементов смежных по номеру b азимутального сектора частных массивов в пределах каждого d-го дальностного канала, а именно для d-го дальностного канала, частные массивы gd1 и gd2 объединяют в массив Md1, частные массивы gd2 и gd3 объединяют в массив Md2, частные массивы gd3 и gd4 объединяют в массив Md3 и так далее до последней пары частных массивов gd(B-1) и gdB, которые объединяют в массив Md(B-1), затем проводят во всех этих объединенных массивах Mdb подсчет числа подряд следующих элементов, значения которых превышают порог обнаружения П1, и при наличии в каком-либо массиве Mdb более N подряд следующих элементов, превышающих порог обнаружения П1, принимают решение о нахождении в b-м азимутальном секторе на d-й дальности протяженного по азимутальной координате воздушного объекта на фоне точечных малоразмерных воздушных объектов.
, зная точное время приема каждого отраженного сигнала каждого периода, а также его соответствие определенному азимутальному положению антенны радиолокатора, выделяют из каждого d-го генерального массива Gd частные массивы gdb, элементы которых соответствуют амплитудам отраженных сигналов в d-x каналах дальности в b-х азимутальных секторах, при этом учитывают, что число N отраженных сигналов в каждом частном массиве gdb d-го дальностного канала b-го азимутального сектора будет равно N=Θβ/(ωβТи), где ωβ - угловая скорость поворота характеристики направленности антенны радиолокатора, последовательно объединяют в массивы Mdb значения элементов смежных по номеру b азимутального сектора частных массивов в пределах каждого d-го дальностного канала, а именно для d-го дальностного канала, частные массивы gd1 и gd2 объединяют в массив Md1, частные массивы gd2 и gd3 объединяют в массив Md2, частные массивы gd3 и gd4 объединяют в массив Md3 и так далее до последней пары частных массивов gd(B-1) и gdB, которые объединяют в массив Md(B-1), затем проводят во всех этих объединенных массивах Mdb подсчет числа подряд следующих элементов, значения которых превышают порог обнаружения П1, и при наличии в каком-либо массиве Mdb более N подряд следующих элементов, превышающих порог обнаружения П1, принимают решение о нахождении в b-м азимутальном секторе на d-й дальности протяженного по азимутальной координате воздушного объекта на фоне точечных малоразмерных воздушных объектов.
| СПОСОБ РАСПОЗНАВАНИЯ ПРОТЯЖЕННОЙ ПО УГЛОВОЙ КООРДИНАТЕ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410714C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДЛИННЫ ПЕРЕМЕЩАЮЩЕГОСЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2518099C1 |
| РЛС распознавания целей | 2019 |
|
RU2720355C1 |
| CN 112698324 A, 23.04.2021 | |||
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В РЕЖИМЕ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2419107C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| WO 2007133083 A1, 22.11.2007. | |||

