Изобретение относится к измерительной технике и может быть использовано в геодезии при создании и развитии ориентирных сетей специального назначения в позиционных районах, а также при инженерно-геодезическом обеспечении строительства и эксплуатации объектов.
Известен способ автономного ориентирования с использованием гироскопов [1, с. 433], который позволяет создавать отдельные ориентирные направления и сети на поверхности земли и под землей вне зависимости от наличия пунктов государственной геодезической сети (ГГС). К недостаткам способа [1] следует отнести:
- высокую стоимость и сложность оборудования, состоящего из гироскопического датчика маятникового типа, угломерного устройства со следящей системой за положением оси гироскопа, блока питания и источника питания всех его узлов;
- подверженность гироскопов влиянию внешних нагрузок и воздействий (эксплуатационных, климатических и т.д.), приводящих к изменениям гироскопической поправки;
- высокие требования к квалификации оператора.
Также, для передачи ориентирования применяют способ триангуляции [2, с. 193], предусматривающий построение на земной поверхности примыкающих друг к другу треугольников с вершинами, закрепляемыми специальными геодезическими пунктами. Указанный способ [2] обладает высокой точностью, однако, требует существенных временных затрат, обусловленных необходимостью выполнения измерений углов и некоторых сторон со множества пунктов в условиях хорошей видимости между ними.
Наиболее близким по технической сущности и достигаемому результату является способ передачи ориентирования путем проложения угловых ходов [3, с. 197]. Данный способ, который выбран в качестве прототипа, характеризуется установкой прибора (тахеометра, теодолита) на исходном пункте ГГС, последовательным выполнением измерений всех углов поворота хода от исходного пункта до пункта, фиксирующего сторону создаваемой ориентирной сети. Значение дирекционного угла направления стороны на конечной точке рассчитывают по формуле

где αисх - дирекционный угол исходной стороны в начале хода; Σβ - сумма измеренных горизонтальных углов в ходе; n - число измеренных углов в ходе.
Точность передачи ориентирования способом [3] оценивают по формуле

где mβ - средняя квадратическая погрешность (СКП) измерения горизонтального угла; mN - СКП измерения направления.
Способу [3] присущи два основных недостатка:
Во-первых, создание трассы в закрытой местности и выполнение измерений всех углов поворота хода требуют значительных временных затрат, продолжительностью до нескольких суток.
Во-вторых, последняя сторона хода искажается суммой погрешностей всех углов хода, накопленной в процессе его проложения.
Для устранения отмеченных недостатков предлагается способ, в котором передача ориентирования осуществляется не по угловому ходу, прокладываемому по поверхности земли, а посредством передачи ориентирования от первого прибора, устанавливаемого произвольно внутри исходной ориентирной сети, ко второму прибору, устанавливаемому
произвольно внутри ориентирной сети в позиционном районе, через направление воздушной линии между двумя беспилотными летательными аппаратами (БПЛА) вертолетного типа, при этом используют значения ориентирующих углов приборов, определяемых относительно направлений на ориентирные пункты (ОРП) и направления воздушной линии между двумя БПЛА.
Отличительные признаки заявленного способа являются существенными, их реализация наряду с измерениями направлений, выполняемыми по прототипу, обеспечивает передачу ориентирования, при этом достигается технический результат, состоящий в снижении трудозатрат, повышении оперативности и точности ориентирования.
Изобретение поясняется описанием конкретного, но не ограничивающего существа вариантом его выполнения и прилагаемыми чертежами.
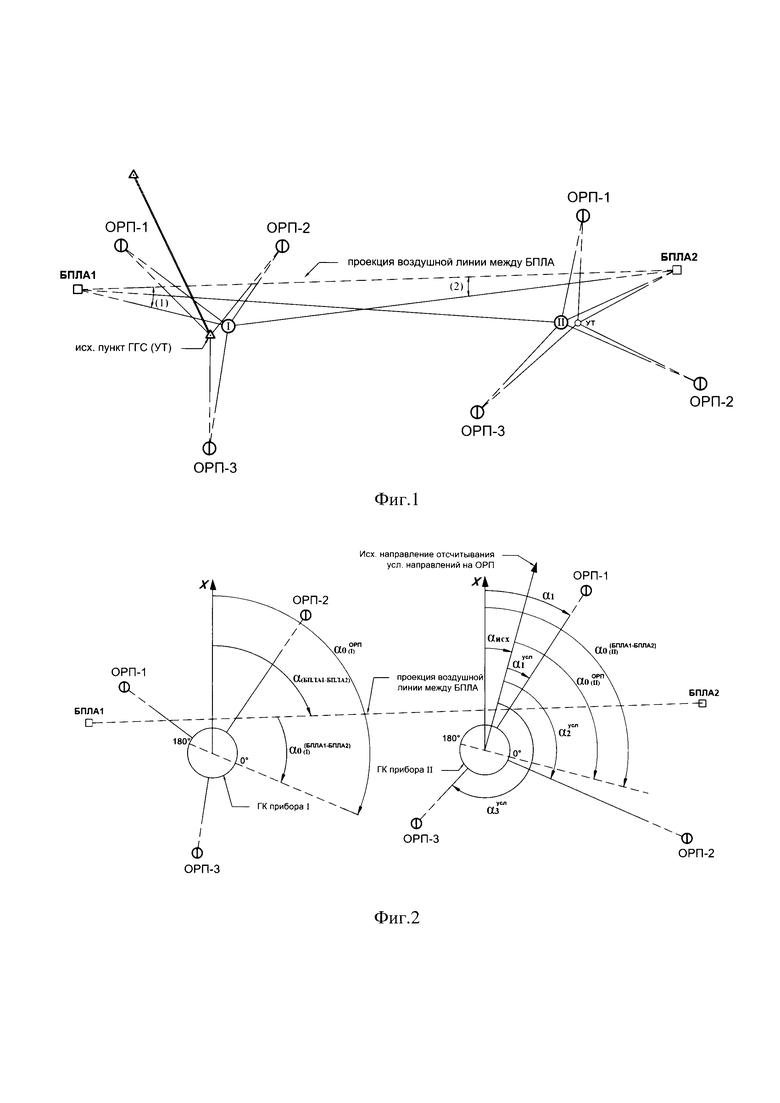
На фиг. 1 представлен вариант схемы размещения ориентирных пунктов (ОРП), мест (точек) установки приборов, положения проекции воздушной линии между БПЛА1 и БПЛА2 на земную поверхность относительно горизонтального круга (ГК) приборов I и II; на фиг. 2 изображена схема взаимного положения ориентирующих углов приборов относительно направления осевого меридиана, направления проекции воздушной лини между БПЛА1 и БПЛА2 и относительно исходного направления отсчитывания условных направлений на ОРП.
Указанный технический результат изобретения достигается тем, что в районе выполнения работ на местности заблаговременно создают ориентирные сети (исходную и развиваемую) в виде треугольников, четырехугольников или их совокупностей, которые закрепляют на местности ОРП. Наиболее оптимальными в создании и последующей эксплуатации являются ориентирные сети, состоящие из трех ОРП, образующих на местности три ориентирных направления, сходящихся в узловой точке (УТ). Первый прибор устанавливают на исходном пункте и определяют дирекционные углы направлений на ОРП и расстояния до них. Второй прибор устанавливают в позиционном районе внутри треугольника ОРП (в последующем - УТ) и измеряют направления на ОРП и расстояния до них.
Для передачи ориентирования второй прибор устанавливают вблизи узловой точки и измеряют направления на ориентирные пункты, устанавливают два беспилотных летательных аппарата вертолетного типа, между которыми образуется воздушная линия на высоте, обеспечивающей возможность синхронного наблюдения БПЛА1 и БПЛА2 приборами I и II и измеряют направления и расстояния до БПЛА1 и БПЛА2, не меняя ориентировку приборов, передача ориентирования осуществляется от первого прибора, устанавливаемого произвольного внутри исходной ориентирной сети, ко второму прибору, устанавливаемому произвольно внутри ориентирной сети в позиционном районе, через направление воздушной линии между БПЛА1 и БПЛА2, при этом используют значения ориентирующих углов приборов, определяемых относительно направлений на ориентирные пункты и направления воздушной линии между двумя БПЛА. Выполняют математическую обработку измерений в следующей последовательности:
1. Вычисляют ориентирующие углы приборов I и II по измерениям направлений на ОРП [4]:
а) по трем направлениям на ОРП, сходящимся в узловой точке по формуле:

где P1=D1 sin(N3 - N2); Р2=D2 sin(N1 - N3); Р3=D3 sin(N2 - N1);
 - значение ориентирующего угла i-го прибора (i = 1, 2);
- значение ориентирующего угла i-го прибора (i = 1, 2);
αi - дирекционный угол направления с УТ на ОРП-i (i = 1, 2, 3);
Di – расстояние (горизонтальное проложение) от УТ до ОРП-i (i = 1, 2, 3);
Ni - измеряемое направление с УТ на ОРП-i (i = 1, 2, 3).
При вычислении ориентирующего угла прибора II неизвестные дирекционные углы направлений на ОРП заменяют условными направлениями, отсчитываемыми от нулевого значения ГК прибора.
б) по направлению воздушной линии между БПЛА1 и БПЛА2:

где DБПЛА1 - расстояние (горизонтальное проложение) от прибора до БПЛА1;
DБПЛА2 - расстояние (горизонтальное проложение) от прибора до БПЛА2;
Ni - измеряемое направление прибором на ОРП-i (i = 1, 2, 3);
α(БПЛА1-БПЛА2) - дирекционный угол направления воздушной линии между БПЛА1-БПЛА2 (принимают равным нулю для расчета ориентирующего угла относительно прибора I и равным дирекционному углу направления воздушной линии между БПЛА1-БПЛА2 для расчета ориентирующего угла относительно прибора II, полученному по прибору I).
2. Вычисляют дирекционный угол направления воздушной линии между БПЛА1 и БПЛА2:

3. Вычисляют дирекционные углы ориентирных направлений сети в позиционном районе по формуле

где  - дирекционный угол условного направления с узловой точки на ОРП;
- дирекционный угол условного направления с узловой точки на ОРП;  - ориентирующий угол прибора II, полученный по дирекционному углу направления воздушной линии между БПЛА1 и БПЛА2;
- ориентирующий угол прибора II, полученный по дирекционному углу направления воздушной линии между БПЛА1 и БПЛА2;
 - ориентирующий угол прибора II, вычисленный по исходным условным направлениям на ОРП, αисх - дирекционный угол исходного направления отсчитывания условных направлений на ОРП прибором II.
- ориентирующий угол прибора II, вычисленный по исходным условным направлениям на ОРП, αисх - дирекционный угол исходного направления отсчитывания условных направлений на ОРП прибором II.
4. Рассчитывают СКП определения ориентирующего угла по трем измеряемым направления на ОРП по формуле

где P1=D1 sin(N3 - N2); P2=D2 sin(N1 - N3); P3=D3 sin(N2 - N1); P=P1+P2+P3, Di - расстояние от узловой точки до ОРПi (i = 1, 2, 3), Ni - измеряемые направления на ОРПi (i = 1, 2, 3).
При размещении прибора внутри треугольника ОРП величина СКП определения его ориентирующего угла меняется в пределах от  до
до  [4].
[4].
5. Рассчитывают СКП определения ориентирующего угла по направлению воздушной линии между БПЛА1 и БПЛА2 по формуле
где  и
и  - СКП измерения расстояния до БПЛА1 и БПЛА2; mN - СКП измерения направлений на БПЛА; DБПЛА1- измеренное расстояние до БПЛА1; DБПЛА2 - измеренное расстояние до БПЛА2; DБПЛА1-БПЛА2 - расстояние между БПЛА1 и БПЛА2; ρ=206265''.
- СКП измерения расстояния до БПЛА1 и БПЛА2; mN - СКП измерения направлений на БПЛА; DБПЛА1- измеренное расстояние до БПЛА1; DБПЛА2 - измеренное расстояние до БПЛА2; DБПЛА1-БПЛА2 - расстояние между БПЛА1 и БПЛА2; ρ=206265''.
Выгоднейшие условия определения ориентирующих углов приборов I и II по направлению воздушной линии между БПЛА1 и БПЛА2 создаются при совмещении ее проекции со стороной, фиксируемой приборами. В этом
случае горизонтальные углы (1) и (2) становятся равными нулю. В результате произведения относительных погрешностей измерения расстояний на синус угла (1) и синус угла (2) принимают пренебрежимо малые значения, тогда расчет СКП определения ориентирующего угла становится возможным по формуле:

При размещении БПЛА с двух сторон на продолжении створа приборов СКП определения ориентирующего угла по формуле (9) примерно равна СКП измерения направления на БПЛА, тогда значение СКП передачи ориентирования, определяемая по четырем ориентирующим углам приборов, будет примерно равно  исходя из формулы
исходя из формулы

где  - СКП ориентирующего угла прибора I по измерениям направлений на ОРП;
- СКП ориентирующего угла прибора I по измерениям направлений на ОРП;  - СКП ориентирующего угла прибора II по измерениям направлений на ОРП;
- СКП ориентирующего угла прибора II по измерениям направлений на ОРП;  - СКП определения ориентирующего угла прибора I по направлению воздушной линии между БПЛА1 и БПЛА2;
- СКП определения ориентирующего угла прибора I по направлению воздушной линии между БПЛА1 и БПЛА2;  -СКП определения ориентирующего угла прибора II по направлению воздушной линии между БПЛА1 и БПЛА2;
-СКП определения ориентирующего угла прибора II по направлению воздушной линии между БПЛА1 и БПЛА2;
При временных ограничениях БПЛА могут размещаться на некотором удалении от створа приборов, тогда значение СКП передачи ориентирования рассчитывают по формуле (8).
Таким образом, достигается технический результат, состоящий в снижении трудозатрат (необходимости в составлении проекта трассы, выполнении рекогносцировки, создании поворотных точек хода,
многочисленных установках приборов и выполнении измерений), повышении оперативности от суток до нескольких часов (за счет сокращения многочисленного количества сторон углового хода до одной воздушной линии между двумя БПЛА вертолетного типа), а также в повышении точности передачи ориентирования с  до
до  по формуле (10).
по формуле (10).
Приведенный авторами анализ научно-технической литературы позволяет сделать вывод о патентной новизне предлагаемого способа передачи ориентирования.
Источники информации, используемые для составления заявки:
1. Дементьев В.Е. Современная геодезическая техника и ее применение: Учебное пособие для вузов. - Изд. 2-е. - М: Академический Проект, 2008. - 591 с.
2. Руководство по геодезическим работам. Развитие геодезических сетей специального назначения (РГ-2). Выпуск 2. - М. РИО ВТС, 1961 - 456 с.
3. Инженерно-геодезическое и метеорологическое обеспечение строительства и эксплуатации военных объектов. Учебник для вузов. - СПб.: ВИКА им. А.Ф. Можайского, 1997. - 424 с.
4. Авторское свидетельство СССР №949338. Способ определения угла разворота лимба угломерного прибора / Н.А. Козлов - №2750651/18-10; Заявлено 09.04.79. - Опубликовано 07.08.82. Бюл. №29.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ совместного определения координат, высот и дирекционных углов направлений | 2022 |
|
RU2798764C1 |
| Способ определения координат точек объекта | 2020 |
|
RU2740686C1 |
| Способ прямой векторной засечки | 2020 |
|
RU2735311C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ ВЫСОКОГО КЛАССА ТОЧНОСТИ | 2012 |
|
RU2500990C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОПОРНОЙ ГЕОДЕЗИЧЕСКОЙ СЕТИ ИСПЫТАТЕЛЬНОЙ ТРАССЫ | 2015 |
|
RU2590532C1 |
| Способ создания высокоточного, защищенного координатного поля в целях обеспечения условий для эффективного выполнения задач как при отсутствии и так при наличии сигналов ГНСС. | 2024 |
|
RU2839049C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| СИСТЕМА ОРИЕНТИРОВАНИЯ МОБИЛЬНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ИЗВЕСТНОМУ ОРИЕНТИРНОМУ НАПРАВЛЕНИЮ | 2024 |
|
RU2838002C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЛОКАЛЬНЫХ ГЕОДЕЗИЧЕСКИХ СЕТЕЙ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ С ИСПОЛЬЗОВАНИЕМ МЕТОДА ОТНОСИТЕЛЬНЫХ ОПРЕДЕЛЕНИЙ ПАРАМЕТРОВ | 2011 |
|
RU2469273C1 |
| СПОСОБ КОНТРОЛЯ РАБОТОСПОСОБНОСТИ И ТОЧНОСТНЫХ ХАРАКТЕРИСТИК НАВИГАЦИОННОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА И КОМПЛЕКТ СРЕДСТВ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2436044C1 |
Изобретение относится к измерительной технике и может быть использовано в геодезии при создании и развитии ориентирных сетей специального назначения в позиционных районах, а также при инженерно-геодезическом обеспечении строительства и эксплуатации объектов. Способ передачи ориентирования включает операции по установке прибора на исходном пункте, выполнение линейных и угловых измерений. При этом второй прибор устанавливают вблизи узловой точки и измеряют направления на ориентирные пункты, устанавливают два беспилотных летательных аппарата (БПЛА) вертолетного типа, между которыми образуется воздушная линия на высоте, обеспечивающей возможность синхронного наблюдения БПЛА1 и БПЛА2 приборами I и II, и измеряют направления и расстояния до БПЛА1 и БПЛА2, не меняя ориентировку приборов, передача ориентирования осуществляется от первого прибора, устанавливаемого произвольно внутри исходной ориентирной сети, ко второму прибору, устанавливаемому произвольно внутри ориентирной сети в позиционном районе, через направление воздушной линии между БПЛА1 и БПЛА2. При этом используют значения ориентирующих углов приборов, определяемых относительно направлений на ориентирные пункты и направления воздушной линии между двумя БПЛА. Технический результат – повышение точности и оперативности ориентирования, а также снижение трудозатрат. 2 ил.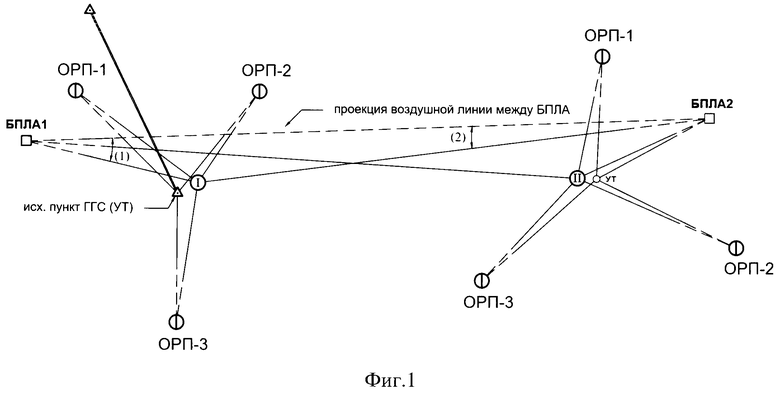
Способ передачи ориентирования, включающий операции по установке прибора на исходном пункте, выполнение линейных и угловых измерений, отличающийся тем, что второй прибор устанавливают вблизи узловой точки и измеряют направления на ориентирные пункты, устанавливают два беспилотных летательных аппарата (БПЛА) вертолетного типа, между которыми образуется воздушная линия на высоте, обеспечивающей возможность синхронного наблюдения БПЛА1 и БПЛА2 приборами I и II, и измеряют направления и расстояния до БПЛА1 и БПЛА2, не меняя ориентировку приборов, передача ориентирования осуществляется от первого прибора, устанавливаемого произвольно внутри исходной ориентирной сети, ко второму прибору, устанавливаемому произвольно внутри ориентирной сети в позиционном районе, через направление воздушной линии между БПЛА1 и БПЛА2, при этом используют значения ориентирующих углов приборов, определяемых относительно направлений на ориентирные пункты и направления воздушной линии между двумя БПЛА.
| СПОСОБ ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ТОЧЕК ОБЪЕКТА | 1991 |
|
RU2012853C1 |
| СПОСОБ И УСТРОЙСТВО СОХРАНЕНИЯ ГЕОДЕЗИЧЕСКОГО НАПРАВЛЕНИЯ | 2013 |
|
RU2555511C2 |
| Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства | 2017 |
|
RU2657334C1 |
| CN 104081156 B, 15.03.2017. | |||

