Изобретение относится к оптико-механическому приборостроению, в частности к устройствам для наведения лазерного луча на объекты в пространстве, удержания луча на выбранном участке объекта и может быть использовано для работы в точных каналах наведения двухканальных систем наведения лазерных комплексов.
Известно, что для достижения высокой точности наведения лазерного луча на пространственный объект используется двухканальная схема системы наведения лазерного комплекса, когда грубое наведение осуществляется разворотом конструкции оптико-механического тракта, а точное - путем поворота в ограниченных углах отдельных элементов оптико-механического тракта, например, вторичного зеркала фокусирующего телескопа [1] по сигналам управления от приемных устройств.
Недостатком подобной схемы при наведении луча, на динамичные протяженные объекты является сложность их идентификации по телевизионному изображению и невозможность точного удержания луча на заданном участке объекта. Это вызвано, с одной стороны, наличием широкого спектра входных и возмущающих воздействий, типичных для лазерных комплексов, что может приводить к «смазу» изображения, а с другой - особенностью самих телевизионных приемных устройств для решения указанных выше задач, поскольку они имеют ограниченную частоту кадров, а также дополнительные задержки на обработку и передачу телевизионного сигнала, что влияет на устойчивость следящих приводов системы наведения лазерного луча и приводит к появлению помех на входе точного канала.
Наиболее близким по технической сущности к предлагаемому способу является способ, реализованный в лазерной локационной системе IRATS [2], заключающийся в предварительном наведении в заданную точку пространства оптической оси телевизионной камеры главным зеркалом системы наведения, которое имеет азимутально-угломестную монтировку. При обнаружении цели включается лазерный передатчик, оптическая ось которого совмещена с оптической осью телевизионной камеры, и начинается активный режим локации. Отклонение цели от оптической оси приемного канала вызывает смещение пятна отраженного излучения от центра 4-х площадочного фотодетектора, оптически сопряженного с выходным телескопом, по сигналам этого фотодетектора осуществляется управление точными приводами - компенсаторами, нагрузкой которых являются зеркала, последовательно установленные по ходу локационного луча в оптико-механическом тракте.
Недостатком способа является отсутствие возможности точного удержания наводимого луча на выбранном по телевизионному изображению участке объекта, что вызвано задержками сигнала телевизионного приемного устройства, обусловленными ограниченной кадровой частотой, транспортными задержками при передаче телевизионного сигнала в устройство обработки и задержкой на вычисление координат. Указанные факторы (задержки) влияют на устойчивость следящих приводов системы наведения лазерного луча и приводят к появлению помех на входе точного канала, вызванных фазовыми искажениями сигнала на выходе телевизионного приемного устройства.
Задачей изобретения является создание способа наведения лазерного луча на объект с повышенной точностью при наведении на заданные участки высокодинамичных объектов благодаря исключению из сигнала управления точным каналом части спектра на выходе телевизионного приемного устройства с недопустимым по условиям точности фазовым сдвигом сигнала и замещения этой части спектра сформированным сигналом с выхода 4-х квадрантного фотоприемного устройства без фазовых сдвигов.
Поставленная задача решается тем, что в известном способе наведения лазерного луча, включающем предварительное наведение лазерного луча по данным целеуказаний грубым каналом и отработку ошибки грубого канала точным каналом по данным измерений координат наблюдаемого объекта телевизионным приемным устройством, оптическая ось которого совмещена с оптической осью лазера, и 4-х квадрантным фотоприемным устройством, оптически сопряженным с выходным телескопом системы наведения, сигнал, измеренный на выходе телевизионного приемного устройства, подают на вход фильтра низких частот с частотой среза, определяемой по формуле:
ωср = ϕдоп / τ,
где ωср - частота среза фильтра низких частот,
ϕдоп - фазовый сдвиг на выходе телевизионного приемного устройства относительно сигнала на его входе, допустимый из условий устойчивости системы наведения и величины приемлемого уровня помехи;
τ - время запаздывания сигнала на выходе телевизионного приемного устройства,
с выхода фильтра низких частот сигнал подают на вход точного канала, наводят по этому сигналу лазерный луч на объект, измеряют координату лазерного луча, отраженного от объекта, 4-х квадрантным фотоприемным устройством, с выхода которого сигнал подают на вход фильтра высоких частот с частотой среза, равной частоте среза фильтра низких частот, и затем подают его на вход точного канала суммарно с сигналом с выхода фильтра низких частот.
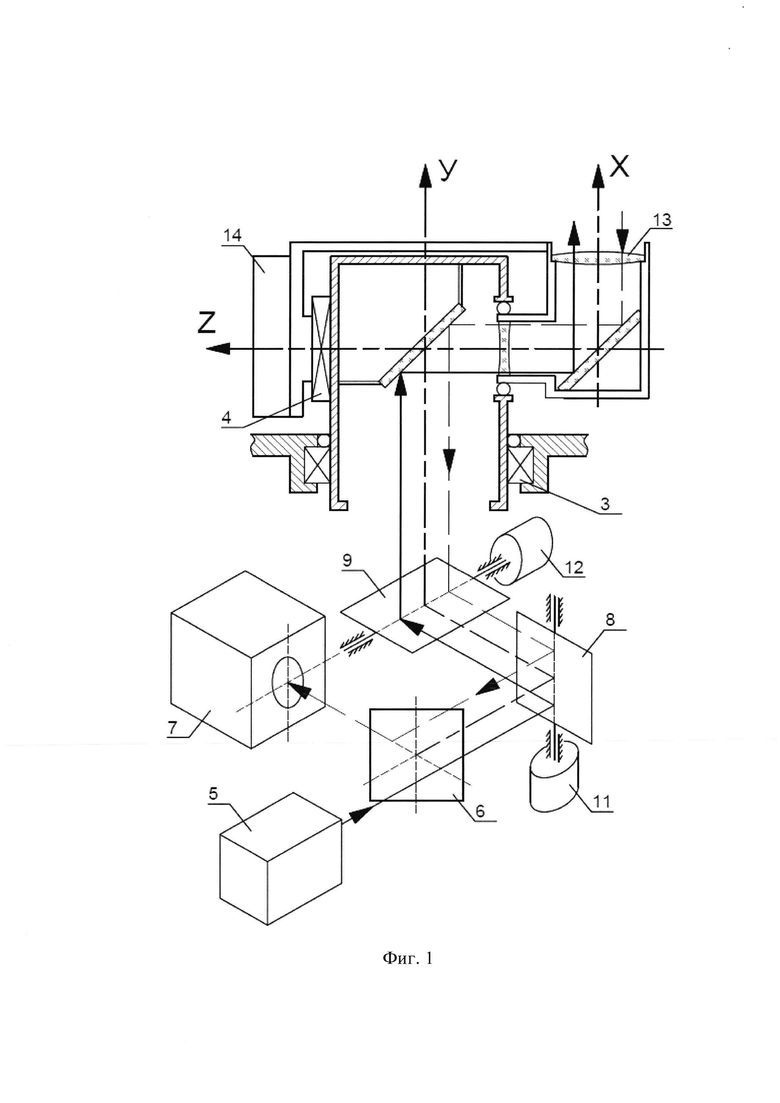
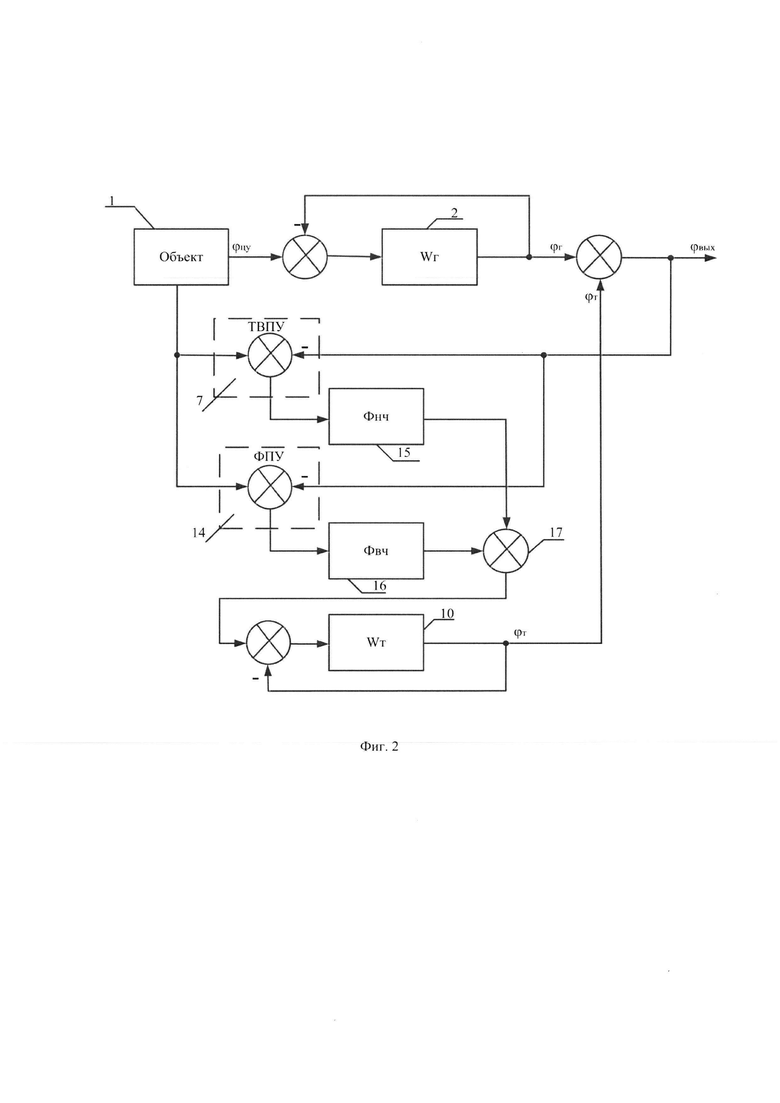
Предлагаемый способ наведения лазерного луча на объект осуществляется в соответствии с оптико-кинематической схемой системы наведения лазерного комплекса (фиг. 1) и структурной схемой системы наведения по одной координате (фиг. 2) следующим образом. Предварительное наведение лазерного луча по данным целеуказаний о координатах объекта 1 выполняется приводами грубого канала 2 с передаточной функцией Wг с использованием азимутального двигателя 3 и угломестного 4. Луч наводимого лазера 5 проходит через дихроичное зеркало 6, разделяющее по длинам волн видимое излучение, идущее к телевизионному приемному устройству 7 (ТВПУ) и наводимый лазерный луч, и последовательно попадает на зеркала 8 и 9 точного канала 10 с передаточной функцией Wт, содержащего двигатели 11 и 12, и через формирующий линзовый телескоп 13 уходит в пространство. Отраженное объектом излучение наводимого лазера принимается 4-х квадрантным фотоприемным устройством 14 (ФПУ), поскольку его оптическая ось оптически сопряжена с выходным телескопом системы наведения. Оптическая ось лазера предварительно совмещена с центром поля зрения телевизионного приемного устройства, причем поле зрения телевизионного приемного устройства перекрывает поле ошибок целеуказания. Выход ТВПУ соединен со входом фильтра низкой частоты 15 (Фнч), а выход ФПУ соединен со входом фильтра высокой частоты 16 (Фвч). Сигналы с выхода обоих фильтров суммируются в сумматоре 17 и подаются на вход точного канала 10.
Система наведения лазерного луча на объект в соответствии со структурной и оптико-кинематической схемами работает по предлагаемому способу следующим образом. После отработки грубым каналом сигналов внешних целеуказаний (координата ϕцу на фиг. 2) телевизионное приемное устройство обнаруживает объект 1 и передает координаты объекта на вход точного канала, который, поворачивая с помощью двигателей 11 и 12 зеркала точного канала 8 и 9, смещает центр поля зрения телевизионного приемного устройства к выбранному по телевизионному изображению участку объекта. При этом наводимый луч тоже перемещается в направлении выбранного участка объекта. При попадании лазерного луча на объект фотоприемное устройство 9 - 4-х квадрантный фотодетектор - конструктивно связанное с угломестной осью и имеющее оптическую ось, сьюстированную параллельно оптической оси телескопа, измеряет координату отраженного от объекта лазерного луча. Поскольку отраженное от участка объекта лазерное излучение значительно превосходит по своей мощности излучение, вызванное обратным рассеянием в атмосфере при прохождении луча по трассе к объекту, в фотоприемном устройстве его выделяют пороговой обработкой сигнала. Электрический сигнал о координатной информации на выходе фотоприемного устройства появляется без задержки, то есть запаздывания не имеет. Но поскольку сигнал с телевизионного приемного устройства поступает с запаздыванием, пропорциональным частоте сигнала, использование всего спектра этого сигнала нецелесообразно, так как появляется дополнительный фазовый сдвиг сигнала в контуре управления системы наведения, что ухудшает устойчивость всей системы при использовании телевизионного приемного устройства, причем для звена чистого запаздывания можно записать [3]:
ϕ = -ωτ, (1),
где ϕ - фазовый сдвиг сигнала,
ω - текущая частота сигнала,
τ - время запаздывания сигнала на выходе телевизионного приемного устройства.
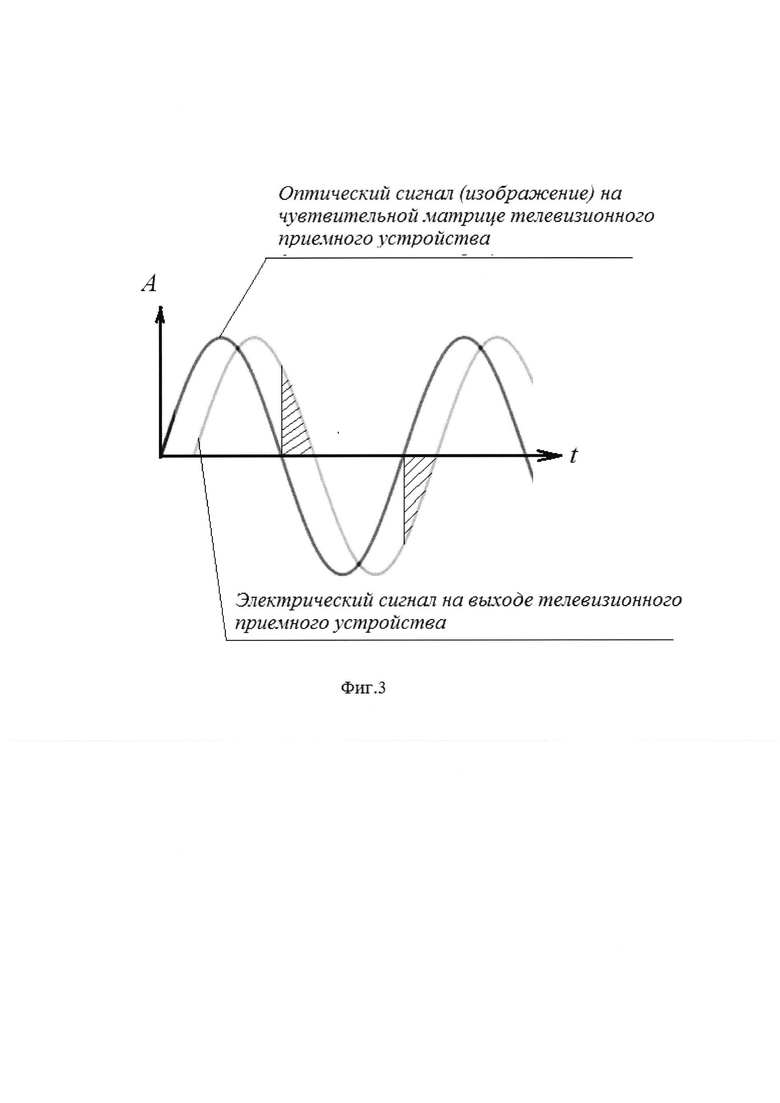
Запаздывание гармонического сигнала на выходе телевизионного приемного устройства (электрический сигнал) при гармоническом воздействии на его входе (оптический сигнал), поступающем на чувствительную матрицу телевизионного приемного устройства, иллюстрирует фиг. 3, из которой видно, что помимо фазовых искажений сигнала, приводящих к ухудшению устойчивости замкнутой системы, у выходной синусоиды появляются участки, где сигнал имеет противоположный знак по отношению ко входному - на фиг. 3 площадь под этими участками синусоиды заштрихована. Такой сигнал для системы наведения является ложным, что приводит к увеличению ошибки наведения. Отметим, что у более высокочастотных гармоник на входе фазовый сдвиг на выходе может доходить до 180 градусов, что означает, что на этих частотах весь сигнал идет в помеху системы наведения, увеличивая ее ошибку. В то же время отказ от использования телевизионного приемного устройства в данных задачах невозможен из-за необходимости иметь изображение объекта. Фильтр низких частот 15 на выходе телевизионного приемного устройства 7 отсекает часть спектра, где фазовый сдвиг приводит к превышению допустимого уровня помехи исходя из технических требований к системе наведения. Частота среза такого фильтра (модуль) из выражения (1) будет иметь значение:
ωср = ϕдоп / τ (2),
где ωср - частота среза фильтра низких частот,
ϕдоп - допустимый из условий устойчивости системы и из величины приемлемого уровня помехи фазовый сдвиг (запаздывание) на выходе телевизионного приемного устройства относительно сигнала на его входе. Этот фазовый сдвиг включает также составляющую, свойственную фильтрам низкой частоты, которая минимизируется выбором параметров и конфигурации Фнч.
Так, например, если допустимый фазовый сдвиг на выходе телевизионного приемного устройства относительно сигнала на его входе ϕдоп не должен превышать 0,5 рад, а величина задержки сигнала (измеренной или рассчитанной) τ = 15 мс, то частота среза фильтра из (2):
ωср = ϕдоп / τ = 0,5 / 15⋅10-3 1/сек = ~ 30 1/сек.
Высокочастотную часть спектра входного воздействия лазерной системы наведения (обычно до нескольких десятков герц) регистрирует 4-х площадочный фотодетектор 14, низкочастотная часть спектра сигнала которого отсекается фильтром высоких частот 16, частота среза которого равна частоте среза фильтра низких частот, определяемой из выражения (2). Этот фильтр дает фазоопережение, что положительно сказывается на характеристиках устойчивости системы в целом. На вход точного канала системы наведения после измерения с помощью ФПУ координат отраженного от объекта излучения подается суммарный сигнал с выхода обоих фильтров, что позволяет по изображению наводить луч на объект и стабилизировать с высокой точностью по сигналу 4-х площадочного фотодетектора его положение на выбранном участке объекта.
В результате координата наводимого луча ϕвых, как показано на фиг. 2, будет складываться из выходной координаты грубого канала ϕг и координаты на выходе точного канала ϕт, которая, в свою очередь, получена после отработки двух частей спектра входного воздействия, не имеющих фазовых искажений выше допустимых.
Предложенный способ наведения лазерного луча на объект позволяет увеличить точность при наведении лазерного луча на заданные участки высокодинамичных объектов благодаря формированию и сложению двух сигналов управления точным каналом системы наведения, один из которых передает координатную информацию по телевизионному изображению объекта и содержит низкочастотную часть спектра входного воздействия точного канала с несущественными фазовыми искажениями, а другой - высокочастотную, без фазовых искажений с информацией о «дрожании» объекта в поле зрения приемных устройств.
Источники информации:
1. Автоматические системы и устройства наведения лазерных пучков / Под ред. В.Б. Чемоданова. - М.: Физматлит, 2016. - С. 36 - 44.
2. Протопопов В.В., Устинов Н.Д. Инфракрасные лазерные локационные системы. - М.: Воениздат, 1987. - С. 85 - 86. - прототип.
3. Юревич Е.И. Теория автоматического управления. - Л.: Энергия, 1975. - С. 50.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ПРИЕМНАЯ СИСТЕМА | 2022 |
|
RU2799499C1 |
| Лазерный голографический локатор | 2023 |
|
RU2812809C1 |
| ЛАЗЕРНАЯ ГОЛОГРАФИЧЕСКАЯ ЛОКАЦИОННАЯ СИСТЕМА | 2022 |
|
RU2790960C1 |
| МНОГОКАНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2617459C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| УСТРОЙСТВО ДЛЯ ФОКУСИРОВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 2005 |
|
RU2301496C1 |
| Способ лазерной связи в открытом пространстве и комплекс для его реализации | 2023 |
|
RU2831323C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| ЛИДАРНЫЙ КОМПЛЕКС КОНТРОЛЯ ЗАГРЯЗНЕНИЯ ВОЗДУХА | 1991 |
|
RU2022251C1 |
Изобретение относится к оптико-механическому приборостроению, к наведению лазерного луча на объекты. Способ наведения лазерного луча на объект включает предварительное наведение лазерного луча по данным целеуказаний грубым каналом и отработку ошибки грубого канала точным каналом по данным измерений координат наблюдаемого объекта телевизионным приемным устройством, оптическая ось которого совмещена с оптической осью лазера, и 4-х квадрантным фотоприемным устройством, оптически сопряженным с выходным телескопом системы наведения. Сигнал, измеренный на выходе телевизионного приемного устройства, подают на вход фильтра низких частот с частотой среза, с выхода фильтра низких частот сигнал подают на вход точного канала, наводят по этому сигналу на объект лазерный луч, измеряют координату отраженного от объекта лазерного излучения 4-х квадрантным фотоприемным устройством, с выхода 4-х квадрантного фотоприемного устройства сигнал подают на вход фильтра высоких частот с частотой среза ωср, равной частоте среза фильтра низких частот, и подают на вход точного канала суммарно с сигналом с выхода фильтра низких частот. Технический результат - увеличение точности наведения. 3 ил.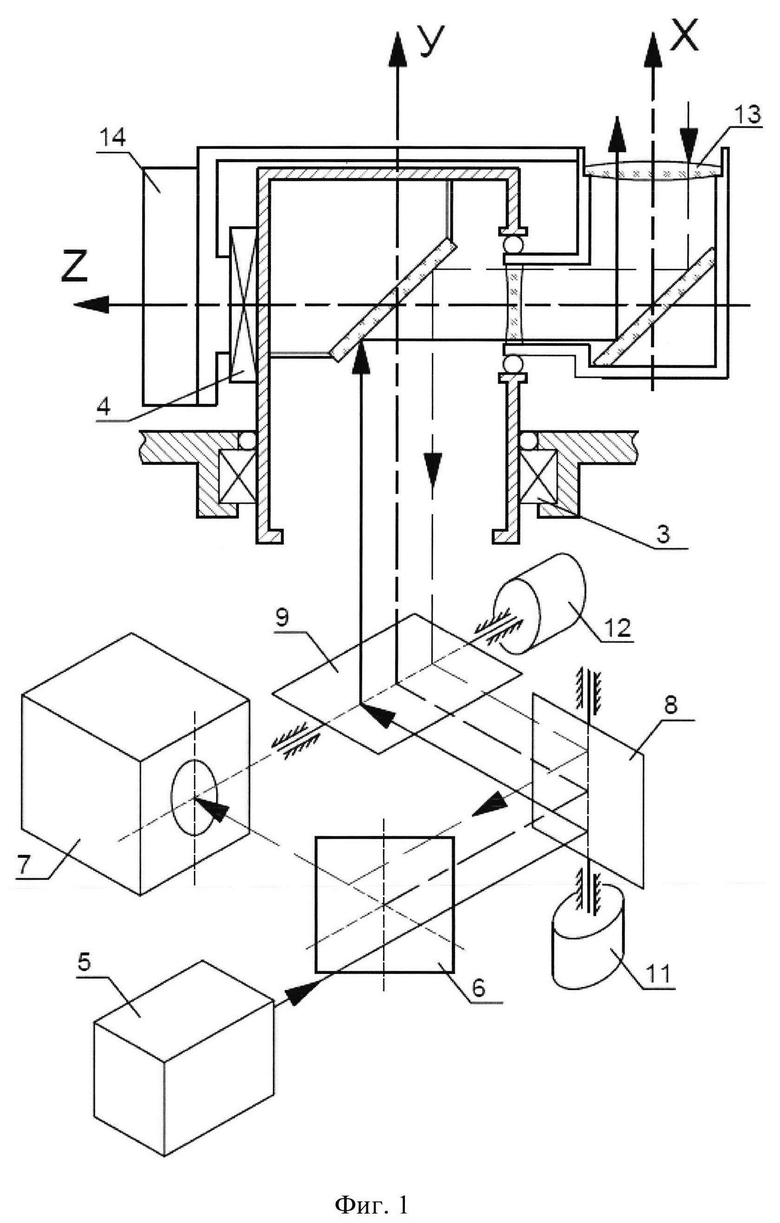
Способ наведения лазерного луча на объект, включающий предварительное наведение лазерного луча по данным целеуказаний грубым каналом и отработку ошибки грубого канала точным каналом по данным измерений координат наблюдаемого объекта телевизионным приемным устройством, оптическая ось которого совмещена с оптической осью лазера, и 4-х квадрантным фотоприемным устройством, оптически сопряженным с выходным телескопом системы наведения, отличающийся тем, что сигнал, измеренный на выходе телевизионного приемного устройства, подают на вход фильтра низких частот с частотой среза, определяемой по формуле:
ωср = ϕдоп / τ
где ωср - частота среза фильтра низких частот;
ϕдоп - фазовый сдвиг на выходе телевизионного приемного устройства относительно сигнала на его входе, допустимый из условий устойчивости системы наведения и величины приемлемого уровня помехи;
τ - время запаздывания сигнала на выходе телевизионного приемного устройства,
с выхода фильтра низких частот сигнал подают на вход точного канала, наводят по этому сигналу лазерный луч на объект, измеряют координату лазерного луча, отраженного от объекта, 4-х квадрантным фотоприемным устройством, с выхода которого сигнал подают на вход фильтра высоких частот с частотой среза, равной частоте среза фильтра низких частот, и затем подают его на вход точного канала суммарно с сигналом с выхода фильтра низких частот.
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНЫХ ПУЧКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2744040C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ЛУЧА НА ОБЪЕКТ | 2022 |
|
RU2788943C1 |
| Оптическая система формирования и наведения лазерного излучения | 2018 |
|
RU2699944C1 |
| US 5517016 A1, 14.05.1996 | |||
| US 8415600 B2, 09.04.2013. | |||

