Изобретение относится к радиотехнике, в частности к системам радиолокации, и предназначено для обнаружения скрытых нелинейных электронных устройств (НЭУ).
Известны нелинейные радиолокаторы (НРЛ) (Хорев А.А. Методы и средства поиска электронных устройств перехвата информации. Москва, изд-во Министерства обороны РФ. 1998 г. 224 с., [1]), содержащие передатчик, частотно-разделительный дуплексер, приёмо-передающую антенну, приёмное устройство, решающее устройство и устройство индикации. Передатчик НРЛ формирует импульсный или непрерывный зондирующий радиосигнал на основной частоте ƒ1, мощность которого определяется физическими условиями распространения радиоволн в среде между приёмо-передающей антенной и НЭУ, а также физическими условиями проявления нелинейности вольтамперных характеристик нелинейных элементов, входящих в состав НЭУ, в отражённом от НЭУ радиосигнале. Зондирующий радиосигнал через прямой тракт частотно-разделительного дуплексера поступает на вход приёмо-передающей антенны. Приёмо-передающая антенна преобразует зондирующий радиосигнал в радиоволны и направляет их на зону обзора, в которой может находиться НЭУ. Если НЭУ там действительно находится, то на электропроводящих элементах (проводниках) НЭУ электромагнитные волны преобразуются во входной электрический сигнал, который воздействует на элементы с нелинейными вольтамперными характеристиками (нелинейные элементы), в результате чего на нелинейных элементах НЭУ возникает выходной электрический сигнал, в спектре которого содержатся как составляющая основной частоты ƒ1 (основная гармоника), так и высшие гармонические составляющие с удвоенной, утроенной и т.д. несущей частотой. Этот выходной электрический сигнал на проводниках НЭУ преобразуется в радиоволны, которые излучаются в пространство, в том числе в направлении приёмо-передающей антенны НРЛ. На выходе приёмо-передающей антенны образуется принятый электрический сигнал, которой поступает на вход обратного тракта частотно-разделительного дуплексера. Частотно-разделительный дуплексер выделяет часть принятого электрического сигнала, содержащую одну или несколько высших гармонических составляющих принятого электрического сигнала, и направляет выделенную часть принятого электрического сигнала на вход приёмного устройства. Приёмное устройство выполняет преобразования выделенной части принятого электрического сигнала, обеспечивающие техническую возможность измерения уровня одной высшей гармонической составляющей или раздельного измерения уровней нескольких высших гармонических составляющих принятого электрического сигнала в решающем устройстве. Решающее устройство выполняет соответствующие измерения, по их результатам принимает решение о наличии или отсутствии НЭУ в зоне обзора и преобразует принятое решение в информационный сигнал вида, воспринимаемого устройством индикации, которое обеспечивает отображение принятого решения в форме, удобной для восприятия оператором НРЛ.
Основными недостатками данного технического решения являются сложность технической реализации приёмо-передающей антенны и приёмного устройства, обусловленная множеством рабочих частот, отличающихся друг от друга в два раза и более, а также ограниченная дальность обнаружения НЭУ из-за низкой эффективности преобразования мощности зондирующего радиосигнала основной гармоники в мощности сигналов высших гармонических составляющих в отражённом от НЭУ сигнале [2].
Наиболее близким к предлагаемому техническому решению и выбранным авторами в качестве прототипа является НРЛ типа Лорнет-Стар в импульсном режиме работы (Произвольно конфигурируемый нелинейный локатор ЛОРНЕТ-СТАР. АО Элвира: сайт. URL: http://www.elvira.ru/ru/productions/nljd-general/nljd-lornet-star/ [3]).
Импульсный режим работы в прототипе применяется для повышения пиковой мощности зондирующего радиосигнала в виде периодической последовательности радиоимпульсов без увеличения средней мощности, потребляемой НРЛ от источника энергии, за счёт накопления энергии в течение интервалов между радиоимпульсами. Величина периода повторения радиоимпульсов определяется требованиями к оперативности применения НРЛ. Длительность радиоимпульса определяется техническими ограничениями на соотношение между значениями ширины частотного спектра и частоты зондирующего сигнала. Для исключения влияния запаздывания отражённого сигнала на качество работы НРЛ, обусловленного ограниченной скоростью распространения радиоволн, минимальная длительность радиоимпульса выбирается во много раз превышающей суммарное время распространения радиоволн от НРЛ до зоны обзора и обратно. При указанных условиях принцип действия прототипа в импульсном режиме работы соответствует описанному выше для аналогов, поэтому прототип обладает теми же недостатками: сложностью технической реализации, обусловленной множеством рабочих частот, и ограниченной дальностью обнаружения НЭУ из-за низкой эффективности преобразования мощности зондирующего радиосигнала основной гармоники в мощности сигналов высших гармонических составляющих в отражённом сигнале.
В предлагаемом изобретении решается задача упрощения технической реализации НРЛ и увеличения дальности обнаружения НЭУ.
Для достижения технического результата используется способ обнаружения НЭУ (Способ обнаружения нелинейных электронных устройств. Пат. № 2998477. Российская Федерация. МПК G01S13/30 (2006.01). Слезкин В.Г., Слезкин Г.В., Афонин И.Л., Поляков А.Л. [4]), в котором обработка осуществляется на основной частоте зондирующего радиосигнала, благодаря чему упрощается техническая реализация НРЛ и увеличивается дальность обнаружения НЭУ.
В предлагаемом НРЛ зондирующий радиосигнал представляет собой периодическую последовательность радиоимпульсов, состоящую из первого и второго радиоимпульсов с прямоугольными огибающими, равными энергиями и частотой заполнения, равной основной частоте зондирующего сигнала ƒ1. Так как энергия радиоимпульса пропорциональна произведению квадрата его амплитуды на длительность, равенство уровней энергии первого и второго радиоимпульсов обеспечивается тем, что амплитуда первого радиоимпульса A1 и амплитуда второго радиоимпульса A2 отличаются в N раз: A2 = NA1, а длительность первого радиоимпульса τ1 и длительность второго радиоимпульса τ2 отличаются в N2 раз в противоположном отношении: τ2 = τ1/N2. Пиковая мощность радиоимпульса минимальной амплитуды определяется физическими условиями распространения радиоволн в среде между приёмо-передающей антенной и НЭУ, а также физическими условиями проявления нелинейности вольтамперных характеристик нелинейных элементов, входящих в состав НЭУ, в отражённом сигнале - такими же, как для прототипа. Величина периода повторения T определяется требованиями к оперативности применения НРЛ - такими же, как в прототипе. Длительности радиоимпульсов τ1 и τ2 определяются техническими ограничениями на соотношения между значениями ширины их частотных спектров и основной частоты зондирующего сигнала ƒ1 - такими же, как в прототипе. Для исключения влияния запаздывания отражённого сигнала на качество работы НРЛ, обусловленного ограниченной скоростью распространения радиоволн, минимальная длительность радиоимпульса τ1 или τ2 выбирается во много раз превышающей суммарное время распространения радиоволн от НРЛ до зоны обзора и обратно, как в прототипе. Величина запаздывания переднего фронта второго радиоимпульса относительно заднего фронта первого радиоимпульса Δt определяется физическими ограничениями, связанными с длительностью последействия зондирующего импульса на НЭУ, а также с техническими ограничениями, обусловленными быстродействием элементной базы НРЛ.
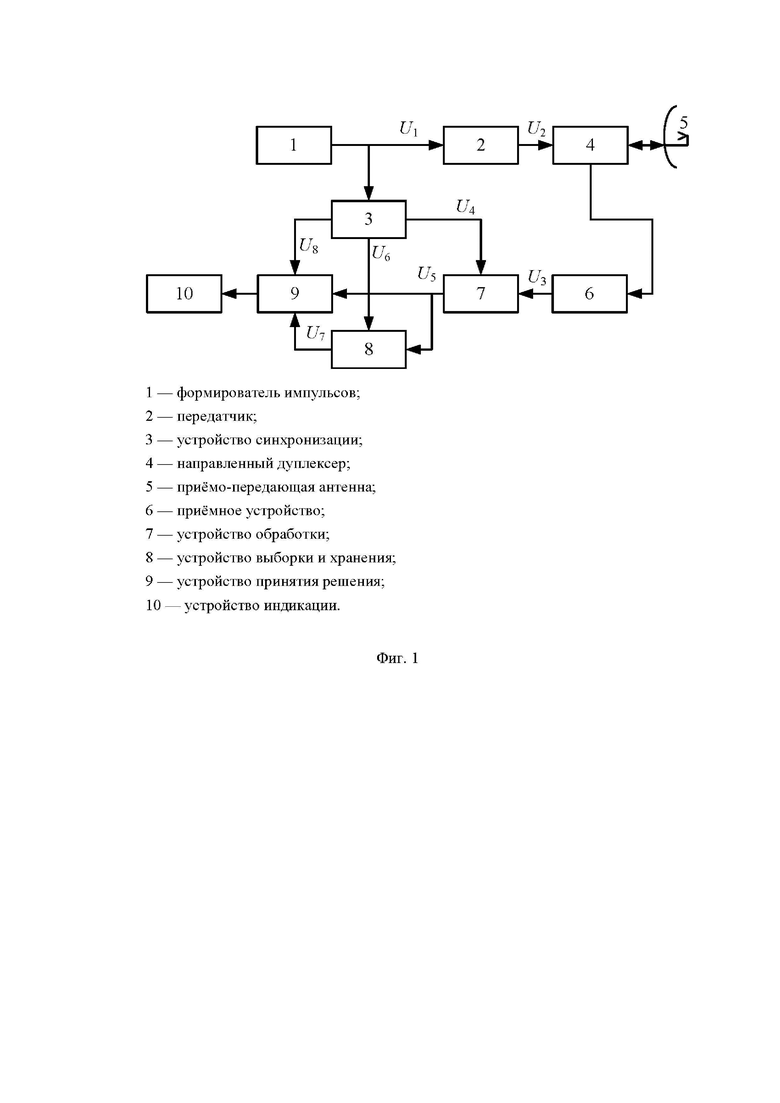
На фиг. 1 изображена структурная схема предлагаемого НРЛ.
НРЛ содержит формирователь импульсов 1, передатчик 2, устройство синхронизации 3, направленный дуплексер 4, приёмо-передающую антенну 5, приёмное устройство 6, устройство обработки 7, устройство выборки и хранения 8, устройство принятия решения 9, устройство индикации 10.
Работа предлагаемого НРЛ в течение одного периода повторения зондирующего сигнала осуществляется следующим образом.
Формирователь импульсов 1 на своём выходе формирует модулирующий сигнал в виде периодической последовательности с периодом T из первого и второго импульсов прямоугольной формы, причём первый импульс имеет амплитуду a1, длительность τ1, второй импульс имеет амплитуду a2, длительность τ2 и запаздывает относительно заднего фронта первого импульса на величину Δt. С выхода формирователя импульсов 1 модулирующий сигнал поступает на вход устройства синхронизации 3 и на вход передатчика 2, который формирует зондирующий радиосигнал в виде периодической последовательности из первого и второго радиоимпульсов на основной частоте ƒ1. Амплитуды первого и второго радиоимпульсов равны A1 и A2, соответственно, а длительности первого и второго радиоимпульсов равны τ1 и τ2, соответственно. Зондирующий радиосигнал с выхода передатчика 2 через прямой тракт направленного дуплексера 4 поступает на вход приёмо-передающей антенны 5, которая преобразует зондирующий радиосигнал в радиоволны и направляет их на зону обзора, в которой может находиться НЭУ. Если НЭУ там действительно находится, то на проводниках НЭУ радиоволны преобразуются во входной электрический сигнал, который воздействует на нелинейные элементы НЭУ, в результате чего на нелинейных элементах НЭУ возникает выходной электрический сигнал, составляющая которого с основной частотой зондирующего радиосигнала вследствие нелинейности вольтамперных характеристик нелинейных элементов НЭУ имеет вид последовательности из первого и второго радиоимпульсов с нарушенным относительно исходного значения N отношением амплитуды второго радиоимпульса к амплитуде первого радиоимпульса. Этот выходной электрический сигнал на проводниках НЭУ преобразуется в радиоволны, которые излучаются в пространство, в том числе в направлении приёмо-передающей антенны 5. На выходе приёмо-передающей антенны 5 образуется принятый радиосигнал на основной частоте зондирующего радиосигнала, который через обратный тракт направленного дуплексера 4 направляется в приёмное устройство 6. В приёмном устройстве 6 принятый радиосигнал преобразуется во внутренний сигнал в форме, допускающей обработку устройством обработки 7. Внутренний сигнал поступает на сигнальный вход устройства обработки 7, на управляющий вход которого поступает сигнал с первого выхода устройства синхронизации 3 в виде последовательности из первого, второго, третьего и четвёртого стробирующих импульсов амплитудой AS, определяемой амплитудными параметрами элементной базы НРЛ, и длительностью τS, минимально достаточной для работы элементной базы НРЛ в соответствии с параметрами её быстродействия, причём положение переднего фронта первого стробирующего импульса определяется положением переднего фронта первого импульса модулирующего сигнала, положение переднего фронта второго стробирующего импульса определяется положением заднего фронта первого импульса модулирующего сигнала, положение переднего фронта третьего стробирующего импульса определяется положением переднего фронта второго импульса модулирующего сигнала, положение переднего фронта четвёртого стробирующего импульса определяется положением заднего фронта второго импульса модулирующего сигнала. В устройстве обработки 7 первый стробирующий импульс своим передним фронтом запускает процесс формирования сигнала на выходе устройства обработки 7 в виде напряжения, пропорционального накопленной к каждому моменту времени энергии первого радиоимпульса зондирующего сигнала, а второй стробирующий импульс своим передним фронтом останавливает этот процесс, затем своим задним фронтом переводит устройство обработки 7 в исходное состояние. В устройстве обработки 7 третий стробирующий импульс своим передним фронтом запускает процесс формирования сигнала на выходе устройства обработки 7 в виде напряжения, пропорционального накопленной к каждому моменту времени энергии второго радиоимпульса зондирующего сигнала, а четвёртый стробирующий импульс своим передним фронтом останавливает этот процесс, затем своим задним фронтом переводит устройство обработки 7 в исходное состояние. Выходной сигнал устройства обработки 7 поступает на сигнальный вход устройства выборки и хранения 8 и первый сигнальный вход устройства принятия решения 9. На управляющий вход устройства выборки и хранения 8 поступает сигнал со второго выхода устройства синхронизации 3 в виде последовательности из второго и четвёртого стробирующих импульсов. Второй стробирующий импульс своим передним фронтом инициирует формирование выходного сигнала устройства выборки и хранения 8 с уровнем, равным уровню выходного сигнала устройства обработки 7 в момент окончания первого радиоимпульса зондирующего сигнала. Четвёртый стробирующий импульс своим задним фронтом переводит устройство выборки и хранения 8 в исходное состояние. Выходной сигнал устройства выборки и хранения 8 поступает на второй сигнальный вход устройства принятия решения 9. На управляющий вход устройства принятия решения 9 поступает сигнал с третьего выхода устройства синхронизации 3 в виде четвёртого стробирующего импульса, который своим передним фронтом инициирует процесс сравнения уровней сигналов на первом сигнальном входе и на втором сигнальном входе устройства принятия решения 9 и формирования выходного сигнала устройства принятия решения 9 в форме, отображающей принятое решение, а своим задним фронтом переводит устройство принятия решения 9 в исходное состояние. Если в момент принятия решения абсолютная величина разности между уровнем сигнала на первом сигнальном входе и уровнем сигнала на втором сигнальном входе устройства принятия решения 9 не превышает заранее установленного уровня неопределённости ΔUND, то устройство принятия решения 9 формирует сигнал на своём выходе, отображающий состояние «НЭУ не обнаружено». Если в момент принятия решения абсолютная величина разности между уровнем сигнала на первом сигнальном входе и уровнем сигнала на втором сигнальном входе превышает заранее установленный уровень неопределённости ΔUND, то устройство принятия решения 9 формирует сигнал на своём выходе, отображающий состояние «НЭУ обнаружено». Выходной сигнал устройства принятия решения 9 поступает на вход устройства индикации 10, которое отображает состояние «НЭУ не обнаружено» или «НЭУ обнаружено» в удобном для восприятия оператором НРЛ виде.
В течение каждого периода повторения описанные выше процессы повторяются.
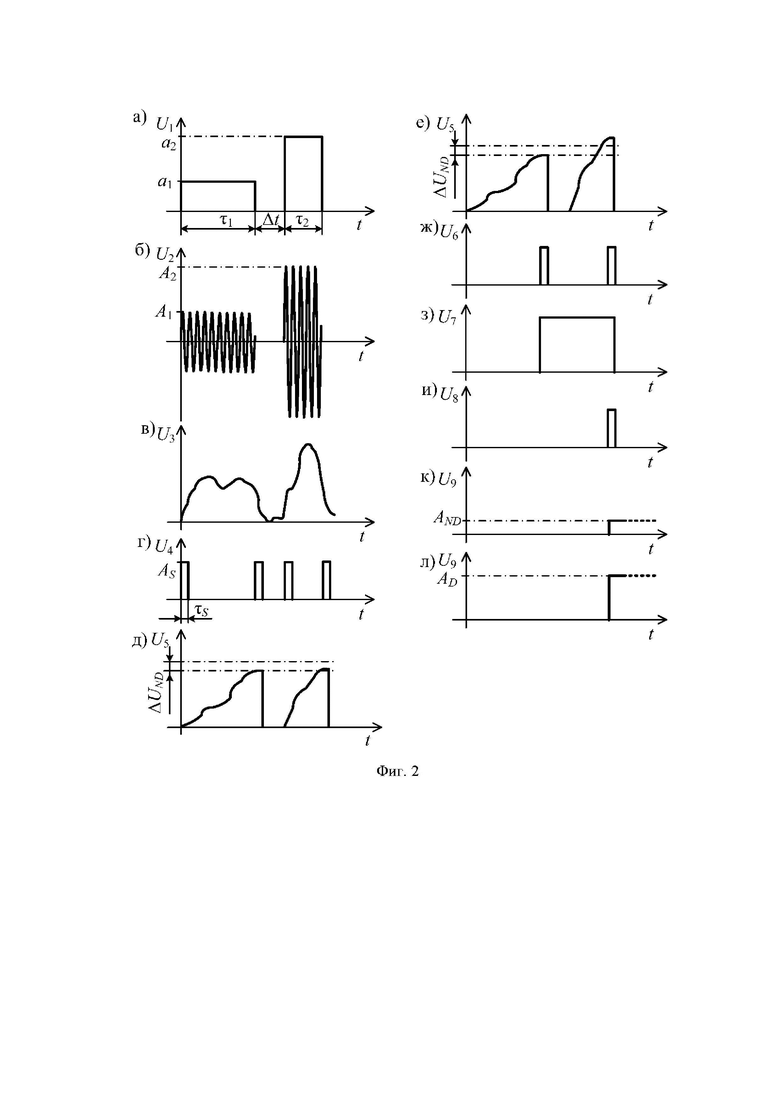
Сущность изобретения и возможность его осуществления поясняются временными диаграммами фиг. 2, приведёнными в пределах одного периода повторения зондирующего сигнала, где
на фиг. 2a приведён вид напряжения U1 на выходе формирователя импульсов 1: первый импульс и второй импульс модулирующего сигнала, для примера амплитуда второго импульса a2 больше амплитуды первого импульса a1, а длительность второго импульса τ2 меньше длительности первого радиоимпульса τ1; передний фронт второго импульса отстаёт от заднего фронта первого импульса на величину Δt;
на фиг. 2б приведён вид напряжения U2 на выходе передатчика 2: первый радиоимпульс и второй радиоимпульс зондирующего сигнала; для примера амплитуда второго радиоимпульса A2 больше амплитуды первого радиоимпульса A1 в N раз, а длительность второго радиоимпульса τ2 меньше длительности первого радиоимпульса τ1 в N2 раз;
на фиг. 2в приведён вид напряжения U3 на выходе приёмного устройства 6: для примера изображён видеосигнал, полученный в результате амплитудного детектирования и выделения постоянной составляющей и низкочастотных составляющих спектра принятого радиосигнала, с искажённой вследствие действия радиопомех формой;
на фиг. 2г приведён вид напряжения U4 на первом выходе устройства синхронизации 3 и на управляющем входе устройства обработки 7 в виде первого, второго, третьего и четвёртого стробирующих импульсов с амплитудой AS и длительностью τS; положение переднего фронта первого стробирующего импульса определяется положением переднего фронта первого импульса модулирующего сигнала, положение переднего фронта второго стробирующего импульса определяется положением заднего фронта первого импульса модулирующего сигнала, положение переднего фронта третьего стробирующего импульса определяется положением переднего фронта второго импульса модулирующего сигнала, положение переднего фронта четвёртого стробирующего импульса определяется положением заднего фронта второго импульса модулирующего сигнала;
на фиг. 2д приведен вид напряжения U5 на выходе устройства обработки 7 при отсутствии НЭУ в зоне обзора НРЛ: формирование напряжения на выходе устройства обработки 7, пропорционального накопленной к каждому моменту времени энергии первого радиоимпульса зондирующего сигнала, происходит на интервале времени от переднего фронта первого стробирующего импульса до переднего фронта второго стробирующего импульса, а задний фронт второго стробирующего импульса переводит устройство обработки 7 в исходное состояние; формирование напряжения на выходе устройства обработки 7, пропорционального накопленной к каждому моменту времени энергии второго радиоимпульса зондирующего сигнала, происходит на интервале времени от переднего фронта третьего стробирующего импульса до переднего фронта четвёртого стробирующего импульса, а задний фронт четвёртого стробирующего импульса переводит устройство обработки 7 в исходное состояние; абсолютная величина разности уровней напряжения на выходе устройства обработки 7 в моменты, определяемые передним фронтом второго стробирующего импульса и передним фронтом четвёртого стробирующего импульса, не превышает заранее установленного уровня неопределённости ΔUND;
на фиг. 2е приведен вид напряжения U5 на выходе устройства обработки 7 при наличии НЭУ в зоне обзора НРЛ: формирование напряжения на выходе устройства обработки 7, пропорционального накопленной к каждому моменту времени энергии первого радиоимпульса зондирующего сигнала, происходит на интервале времени от переднего фронта первого стробирующего импульса до переднего фронта второго стробирующего импульса, а задний фронт второго стробирующего импульса переводит устройство обработки 7 в исходное состояние; формирование напряжения на выходе устройства обработки 7, пропорционального накопленной к каждому моменту времени энергии второго радиоимпульса зондирующего сигнала, происходит на интервале времени от переднего фронта третьего стробирующего импульса до переднего фронта четвёртого стробирующего импульса, а задний фронт четвёртого стробирующего импульса переводит устройство обработки 7 в исходное состояние; абсолютная величина разности уровней напряжения на выходе устройства обработки 7 в моменты, определяемые передним фронтом второго стробирующего импульса и передним фронтом четвёртого стробирующего импульса, превышает заранее установленный уровень неопределённости ΔUND;
на фиг. 2ж приведен вид напряжения U6 на втором выходе устройства синхронизации 3 и на управляющем входе устройства выборки и хранения 8 в виде второго и четвёртого стробирующих импульсов (см. фиг. 2г);
на фиг. 2з приведен вид напряжения U7 на втором выходе устройства выборки и хранения 8: уровень отклика устройства обработки 7, пропорционального энергии первого радиоимпульса зондирующего сигнала, передаётся на выход устройства обработки 7 на интервале времени от переднего фронта второго стробирующего импульса до заднего фронта четвёртого стробирующего импульса, который переводит устройство выборки и хранения 8 в исходное состояние;
на фиг. 2и приведен вид напряжения U8 на третьем выходе устройства синхронизации 3 и на управляющем входе устройства принятия решения 9 в виде четвёртого стробирующего импульса (см. фиг. 2г);
на фиг. 2к приведен вид напряжения U8 на выходе устройства принятия решения 9 при отсутствии НЭУ в зоне обзора НРЛ: для примера исходный уровень напряжения U8 на выходе устройства принятия решения 9 показан нулевым, а состояние устройства принятия решения 9 «НЭУ не обнаружено» отображается сигналом низкого уровня AND, который устанавливается в момент принятия решения, определяемый передним фронтом четвёртого стробирующего импульса и сохраняется до следующего момента принятия решения;
на фиг. 2л приведен вид напряжения U8 на выходе устройства принятия решения 9 при наличии НЭУ в зоне обзора НРЛ: для примера исходный уровень напряжения U8 на выходе устройства принятия решения 9 показан нулевым, а состояние устройства принятия решения 9 «НЭУ обнаружено» отображается сигналом высокого уровня AD, который устанавливается в момент принятия решения, определяемый передним фронтом четвёртого стробирующего импульса и сохраняется до следующего момента принятия решения.
По сравнению с известным, предложенное техническое решение проявляет новое техническое свойство, заключающееся в том, что обнаружение НЭУ осуществляется в результате сравнения уровней двух сигналов, полученных путём обработки на частоте основной гармоники зондирующего сигнала в виде периодической последовательности из пар радиоимпульсов, следующих друг за другом и имеющих разную амплитуду, но одинаковую энергию. Таким образом, предлагаемый НРЛ при технически несложном изменении состава образующих НРЛ устройств и их функций, обеспечивает существенное упрощение технической реализации НРЛ, так как не требует обработки принятого сигнала на частотах высших гармоник, а также обеспечивает увеличение дальности обнаружения НЭУ при фиксированной мощности зондирующего сигнала, так как количественные различия в уровнях принятых сигналов на частоте основной гармоники, вызванные нелинейностью вольтамперных характеристик нелинейных элементов НЭУ, существенно выше количественных показателей преобразования уровней сигналов на частоте основной гармоники в уровни сигналов на частотах высших гармоник.
Рассмотрение состава образующих НРЛ устройств и их функций показывает, что заявляемое техническое решение НРЛ осуществимо и обеспечивает достижения технического результата, заключающегося в упрощении технической реализации и повышении дальности обнаружения НЭУ.
Источники информации
1. Хорев А. А. Методы и средства поиска электронных устройств перехвата информации. Москва, изд-во Министерства обороны РФ. 1998 г. 224 с.
2. Афонин И.Л., Дегтярёв А.Н., Поляков А.Л., Слезкин В.Г. Об использовании двухуровневого зондирующего сигнала в нелинейной радиолокации. Журнал радиоэлектроники [электронный журнал]. 2021. № 11. DOI: https://doi.org/10.30898/1684-1719.2021.11.3.
3. Произвольно конфигурируемый нелинейный локатор ЛОРНЕТ-СТАР. АО Элвира: сайт. URL: http://www.elvira.ru/ru/productions/nljd-general/nljd-lornet-star/ (дата обращения 12.08.2023).
4. Пат. № 2998477. Российская Федерация. МПК G01S13/30 (2006.01). Способ обнаружения нелинейных электронных устройств. № 2022111171. Заявл. 22.04.2022. Опубл. 23.06.2023. Слезкин В.Г., Слезкин Г.В., Афонин И.Л., Поляков А.Л. Заявитель СевГУ. 9 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ НЕЛИНЕЙНЫХ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2022 |
|
RU2798477C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ПЕРЕМЕЩАЮЩИХСЯ НАБЛЮДАЕМЫХ ОБЪЕКТОВ В УСЛОВИЯХ БЫСТРОГО ИЗМЕНЕНИЯ ПАРАМЕТРОВ ОКРУЖАЮЩЕЙ СРЕДЫ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ (ВАРИАНТЫ) | 2022 |
|
RU2797440C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОИСКА, СОДЕРЖАЩИХ МЕТАЛЛИЧЕСКИЕ КОНТАКТЫ, В НЕЛИНЕЙНЫХ РАДИОЛОКАТОРАХ БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2614038C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2023 |
|
RU2801741C1 |
| Способ ультразвукового контроля толщины стенки трубопровода | 2018 |
|
RU2687086C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| СПОСОБ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ И УСТРОЙСТВО С АВТОДИННЫМ ПРИЁМОПЕРЕДАТЧИКОМ ДЛЯ КОНТРОЛЯ ДВУХ ЗОН СЕЛЕКЦИИ ЦЕЛИ ПО ДАЛЬНОСТИ | 2023 |
|
RU2822284C1 |
| Устройство синхронизации приёмной и передающей части радиолинии при использовании короткоимпульсных сверхширокополосных сигналов | 2019 |
|
RU2713379C1 |
| СПОСОБ УЛУЧШЕНИЯ ХАРАКТЕРИСТИК НЕЛИНЕЙНОГО РАДИОЛОКАТОРА | 2016 |
|
RU2643199C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ДВУХЧАСТОТНОМ НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2016 |
|
RU2621319C1 |
Изобретение относится к радиотехнике, в частности к системам радиолокации, и предназначено для обнаружения скрытых нелинейных электронных устройств (НЭУ). Технический результат – упрощение конструкции и увеличение дальности обнаружения НЭУ. В состав нелинейного радиолокатора, содержащего передатчик, приёмо-передающую антенну, приёмное устройство и устройство индикации, дополнительно введены формирователь импульсов, устройство синхронизации, направленный дуплексер, устройство обработки, устройство выборки и хранения, устройство принятия решения. Формирователь импульсов обеспечивает формирование модулирующего сигнала в виде периодической последовательности из первого и второго импульсов прямоугольной формы, причём первый импульс имеет амплитуду a1, длительность τ1, второй импульс имеет амплитуду a2, длительность τ2 и запаздывает относительно заднего фронта первого импульса на величину Δt. Модулирующий сигнал поступает на вход устройства синхронизации и на вход передатчика, который обеспечивает формирование зондирующего радиосигнала в виде периодической последовательности из первого и второго радиоимпульсов на основной частоте ƒ1, в котором амплитуда первого радиоимпульса A1 отличается от амплитуды второго радиоимпульса A2 в N раз, а длительность первого радиоимпульса τ1 отличается от длительности второго радиоимпульса τ2 в N2 раз в обратном отношении. Передатчик через прямой тракт направленного дуплексера передает зондирующий радиосигнал на вход приёмо-передающей антенны, обеспечивающую направление зондирующего радиосигнала в зону обзора и преобразование отражённых от зоны обзора радиоволн в принятый радиосигнал на основной частоте ƒ1, который через обратный тракт направленного дуплексера поступает на вход приёмного устройства. Обработку отраженных от НЭУ сигналов производят на основной частоте зондирующего сигнала вследствие количественных различий в проявлении влияния нелинейности вольтамперных характеристик нелинейных элементов электронных устройств на амплитуды сигналов на частоте основной гармоники и на уровни высших гармоник. 2 ил.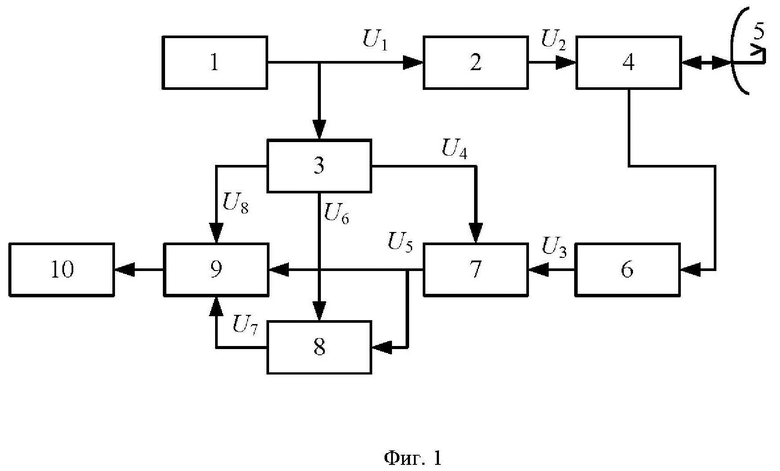
Нелинейный радиолокатор (НРЛ), содержащий передатчик, приёмо-передающую антенну, приёмное устройство и устройство индикации, отличающийся тем, что в его состав входят формирователь импульсов, устройство синхронизации, направленный дуплексер, устройство обработки, устройство выборки и хранения, устройство принятия решения, при этом формирователь импульсов формирует модулирующий сигнал в виде периодической последовательности с периодом T из первого импульса и второго импульса прямоугольной формы, причём первый импульс имеет амплитуду a1, длительность τ1, второй импульс имеет амплитуду a2, длительность τ2 и запаздывает относительно заднего фронта первого импульса на величину Δt, которая определяется физическими ограничениями, связанными с длительностью последействия зондирующего радиосигнала на нелинейное электронное устройство (НЭУ), и с техническими ограничениями, обусловленными быстродействием элементной базы НРЛ, а модулирующий сигнал поступает на вход устройства синхронизации и на вход передатчика, который формирует зондирующий радиосигнал в виде периодической последовательности из первого и второго радиоимпульсов на основной частоте f1, в котором амплитуда первого радиоимпульса A1 отличается от амплитуды второго радиоимпульса A2 в N раз, а длительность первого радиоимпульса τ1 отличается от длительности второго радиоимпульса τ2 в N2 раз в обратном отношении, зондирующий радиосигнал с выхода передатчика через прямой тракт направленного дуплексера поступает на вход приёмо-передающей антенны, которая преобразует зондирующий радиосигнал в радиоволны и направляет радиоволны на зону обзора, затем производит обратное преобразование отражённых от зоны обзора радиоволн в принятый радиосигнал на основной частоте f1, который через обратный тракт направленного дуплексера поступает на вход приёмного устройства, преобразующего принятый радиосигнал во внутренний сигнал в форме, допускающей обработку устройством обработки, и с выхода приёмного устройства внутренний сигнал поступает на сигнальный вход устройства обработки, на управляющий вход которого поступает сигнал с первого выхода устройства синхронизации в виде последовательности из первого, второго, третьего и четвёртого стробирующих импульсов с амплитудой AS, определяемой амплитудными параметрами элементной базы НРЛ, и длительностью τS, минимально достаточной для работы элементной базы НРЛ в соответствии с её быстродействием, причём положение переднего фронта первого стробирующего импульса определяется положением переднего фронта первого импульса модулирующего сигнала, положение переднего фронта второго стробирующего импульса определяется положением заднего фронта первого импульса модулирующего сигнала, положение переднего фронта третьего стробирующего импульса определяется положением переднего фронта второго импульса модулирующего сигнала, положение переднего фронта четвёртого стробирующего импульса определяется положением заднего фронта второго импульса модулирующего сигнала, при этом первый стробирующий импульс своим передним фронтом запускает процесс формирования сигнала на выходе устройства обработки в виде напряжения, пропорционального накопленной к каждому моменту времени энергии первого радиоимпульса зондирующего сигнала, а второй стробирующий импульс своим передним фронтом останавливает этот процесс, затем своим задним фронтом переводит устройство обработки в исходное состояние, после чего третий стробирующий импульс своим передним фронтом запускает процесс формирования сигнала на выходе устройства обработки в виде напряжения, пропорционального накопленной к каждому моменту времени энергии второго радиоимпульса зондирующего сигнала, а четвёртый стробирующий импульс своим передним фронтом останавливает этот процесс, затем своим задним фронтом переводит устройство обработки в исходное состояние, сигнал с выхода устройства обработки поступает на первый сигнальный вход устройства принятия решения и сигнальный вход устройства выборки и хранения, на управляющий вход устройства выборки и хранения поступает сигнал со второго выхода устройства синхронизации в виде последовательности из второго и четвёртого стробирующих импульсов, причём второй стробирующий импульс своим передним фронтом инициирует формирование выходного сигнала устройства выборки и хранения с уровнем, равным уровню выходного сигнала устройства обработки в момент окончания первого радиоимпульса зондирующего сигнала, а четвёртый стробирующий импульс своим задним фронтом переводит устройство выборки и хранения в исходное состояние, затем выходной сигнал устройства выборки и хранения поступает на второй сигнальный вход устройства принятия решения, на управляющий вход которого поступает сигнал с третьего выхода устройства синхронизации в виде четвёртого стробирующего импульса, который своим передним фронтом инициирует процесс сравнения уровней сигналов, поступивших на первый сигнальный вход и на второй сигнальный вход устройства принятия решения, а своим задним фронтом инциирует формирование сигнала на выходе устройства принятия решения в форме, отображающей принятое решение, а также переводит устройство принятия решения в исходное состояние, причём если в момент принятия решения абсолютная величина разности между уровнем сигнала на первом сигнальном входе и уровнем сигнала на втором сигнальном входе устройства принятия решения не превышает заранее установленного уровня неопределённости ΔUND, то устройство принятия решения формирует сигнал на своём выходе, отображающий состояние «НЭУ не обнаружено», а если в момент принятия решения абсолютная величина разности между уровнем сигнала на первом сигнальном входе и уровнем сигнала на втором сигнальном входе устройства принятия решения превышает заранее установленный уровень неопределённости ΔUND, то устройство принятия решения формирует сигнал на своём выходе, отображающий состояние «НЭУ обнаружено», при этом выходной сигнал устройства принятия решения поступает на вход устройства индикации, которое отображает состояние устройства принятия решения «НЭУ не обнаружено» или «НЭУ обнаружено» в удобном для восприятия оператором НРЛ виде.
| СПОСОБ ОБНАРУЖЕНИЯ НЕЛИНЕЙНЫХ ЭЛЕКТРОННЫХ УСТРОЙСТВ | 2022 |
|
RU2798477C1 |
| Произвольно конфигурируемый нелинейный локатор ЛОРНЕТ-СТАР | |||
| Научно-производственное предприятие АО ПФ "ЭЛВИРА" [электронный ресурс: http://www.elvira.ru/data/ PDF_FILES/LORNET-STAR_brochure_RUS.pdf, дата обращения 08.05.2024] | |||
| СПОСОБ ОБНАРУЖЕНИЯ ОДНОКОНТУРНЫХ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ С НЕЛИНЕЙНЫМ ФОРМИРОВАНИЕМ СИНХРОНИЗИРУЮЩЕГО СИГНАЛА | 2011 |
|
RU2496122C2 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕЛИНЕЙНОГО ОБЪЕКТА С РАСПОЗНАВАНИЕМ ТИПА НЕЛИНЕЙНОСТИ | 2001 |
|
RU2205419C2 |
| НЕЛИНЕЙНАЯ РЛС С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ | 2008 |
|
RU2386979C2 |

