Область техники, к которой относится изобретение
[0001] Предложенные технические решения относятся к способам измерения дальности до наблюдаемых близко расположенных и перемещающихся объектов в условиях быстрого изменения параметров окружающей среды и к системам для реализации упомянутых способов.
Уровень техники
[0002] Для обеспечения безопасности на железной дороге необходимо следить за состоянием элементов контактной подвески, в частности, за высотой, натяжением и стрелой провеса несущего троса и контактного провода на электрифицированных железных дорогах, провисание которых свыше допустимой величины может привести к аварийной ситуации. Натяжение упомянутых несущего троса и контактного провода обеспечиваются грузовыми компенсаторами (противовесами блочного, блочно-полиспастного, барабанного типа), подвешенными на анкерных опорах, соединёнными с контактным проводом и несущим тросом через блоки подвеса, и выполнены с возможностью перемещения по вертикали грузов грузовых компенсаторов при изменении температуры окружающей среды. Для контроля работоспособности грузовых компенсаторов и требуемых натяжений несущего троса и контактного провода необходимо проводить постоянное измерение высоты подвеса грузов грузовых компенсаторов. Ввиду малых расстояний от точек высоты подвеса несущего троса и контактного провода до точек подвеса грузов компенсаторов и условий эксплуатации предпочтение отдаётся ультразвуковому методу измерения высоты подвеса грузов компенсаторов относительно несущего троса и контактного провода. С этой целью стандартно применяют датчики, представляющие собой ультразвуковые приёмопередатчики (УПП), которые решают эту задачу, излучая ультразвуковой импульс и получая отражённый ультразвуковой сигнал от наблюдаемых объектов, измеряют время между моментами излучения ультразвукового импульса и приёма отражённого ультразвукового импульса и по скорости распространения ультразвукового импульса рассчитывают дальность до наблюдаемого объекта.
[0003] Однако данному способу присущи существенные недостатки. Во-первых, скорость распространения ультразвуковых волн в атмосфере зависит от параметров атмосферы, таких как температура окружающей среды, влажность, загрязнённость (наличие пыли, дыма и т.п.). Во-вторых, наличие отражённых ультразвуковых сигналов от посторонних объектов. В-третьих, невозможность привязки принимаемого отражённого ультразвукового импульса к конкретному наблюдаемому объекту из числа полезных объектов, находящихся в поле облучения ультразвукового излучателя.
[0004] Известна «Система локального позиционирования объектов», раскрытая в патентном документе RU2609582C1, опубл.02.02.2017, и принятая в качестве наиболее близкого аналога. Изобретение относится к области обработки данных и может быть использовано для создания систем локального позиционирования объектов, в частности, для определения местонахождения оборудования и людей в помещениях и на прилегающих площадках. Достигаемый технический результат - повышение точности позиционирования системы. Указанный результат достигается за счёт того, что система локального позиционирования объектов содержит идентификаторы и устройство контроля, при этом в устройство контроля входит блок контроля, приёмо-передающие устройства, расположенные на известном расстоянии друг от друга, вычислительное устройство. Идентификаторы установлены на объектах и соединены по радиоканалу приёма и ультразвуковому каналу передачи с приёма-передающими устройствами, которые по шине управления и шине данных соединены с вычислительным устройством. Местоположение объектов определяется по времени задержки распространения ультразвуковых сигналов относительно радиосигналов.
[0005] Этой системе кроме вышеописанных недостатков (отсутствие учёта скорости распространения ультразвуковых волн) присущи дополнительные: дальность до объектов измеряется не одновременно, а по времени распространения разных ультразвуковых импульсов, своего для каждого объекта, то есть в разные моменты времени и, следовательно, при разном состоянии атмосферы. Кроме того, использование ультразвуковых передатчиков на объектах приводит к повышенному электропотреблению, усложнению конструкции, уменьшению времени автономной работы
[0006] Для учёта параметров окружающей среды распространения ультразвуковых импульсов, в частности, температуры используют датчики температуры, однако при этом измеряется температура корпуса датчика, считая, что его температура соответствует температуре окружающей среды. При быстром изменении параметров окружающей среды, в частности, температуры, датчик температуры, входящий в состав ультразвукового датчика, не будет отражать действительную температуру среды распространения колебаний, что приведёт к повышенной погрешности измерений.
[0007] Кроме того, не учитываются такие параметры окружающей среды как мешающие факторы: наличие пыли в атмосфере, задымлённость, влажность, а также направленный ветер и вихревые воздушные потоки, влияющие на скорость распространения ультразвуковых колебаний. Особо следует отметить тот факт, что предлагаемое техническое решение предпочтительно будет эксплуатироваться в условиях быстрого изменения параметров окружающей среды, т.е. среды распространения ультразвуковых волн (в данном случае - атмосферы), заключающихся не только в изменении температуры, но и в порывах ветра, различного рода осадков (дождя, снега, града), резко возникающих турбулентных завихрений при проходе железнодорожных составов, особенно высокоскоростных и прочих мешающих факторов. При этом ответные от наблюдаемых объектов ультразвуковые сигналы, излучаемые с некоторым интервалом времени, будут распространяться в различные моменты времени с отличающимися параметрами среды распространения, а, следовательно, различной будет и скорость распространения этих сигналов, что неизбежно приведёт к ошибкам измерения дальности до наблюдаемых объектов.
[0008] Техническая проблема заключается в создании технического решения, в котором устранены недостатки аналога, в частности, использование которого позволит устранить влияние быстро изменяющихся параметров окружающей среды на измерение расстояния, а также устранить влияние сигналов, отражённых от посторонних объектов и повысить надёжность измерения дальности до перемещающихся наблюдаемых объектов, уменьшить энергопотребление и упростить конструкцию наблюдаемых объектов.
Раскрытие сущности изобретения
[0009] Технический результат заключается повышении надёжности системы измерения дальности до перемещающихся наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды за счёт повышения точности и надёжности измерения дальности, уменьшения энергопотребления, упрощения её конструкции, увеличения её долговечности, обеспечения возможности различения (идентификации) сигналов от каждого объекта.
[0010] Технический результат достигается за счёт того, что способ измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по первому варианту содержит этапы, на которых:
[0011] - передают одновременно быстрый сигнал и медленный сигнал от измерительной станции в опорный объект и в по меньшей мере один наблюдаемый объект, при этом быстрый сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной электромагнитной волны, медленный сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной звуковой волны, опорный объект расположен на заданном расстоянии от измерительной станции, а по меньшей мере один наблюдаемый объект расположен между измерительной станцией и опорным объектом и выполнен с возможностью перемещения,
[0012] - принимают быстрый сигнал от измерительной станции в опорном объекте и в по меньшей мере одном наблюдаемом объекте,
[0013] - фиксируют момент приёма быстрого сигнала в опорном объекте и момент приёма быстрого сигнала в по меньшей мере одном наблюдаемом объекте,
[0014] - принимают медленный сигнал от измерительной станции в опорном объекте и в по меньшей мере одном наблюдаемом объекте,
[0015] - фиксируют момент приёма медленного сигнала в опорном объекте и момент приёма медленного сигнала в по меньшей мере одном наблюдаемом объекте,
[0016] - вычисляют интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала в опорном объекте и интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала в по меньшей мере одном наблюдаемом объекте,
[0017] - передают интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от опорного объекта и интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта в измерительную станцию,
[0018] - принимают интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от опорного объекта и интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта в измерительной станции,
[0019] - вычисляют расстояние от измерительной станции до по меньшей мере одного наблюдаемого объекта в измерительной станции на основе известности расстояния от измерительной станции до опорного объекта, интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала, принятого от соответствующего по меньшей мере одного наблюдаемого объекта, и интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала, принятого от опорного объекта.
[0020] В дополнительном аспекте способ по первому варианту характеризуется тем, что перед этапом, на котором передают интервалы времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационные номера от опорного объекта и по меньшей мере одного наблюдаемого объекта, он дополнительно содержит этап, на котором:
[0021] - запрашивают интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от опорного объекта и интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта из измерительной станции.
[0022] Технический результат достигается за счёт того, что система для измерения дальности до перемещающихся наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды для осуществления способа по первому варианту содержит:
[0023] - измерительную станцию, выполненную с возможностью передачи одновременно быстрого сигнала и медленного сигнала в опорный объект и в по меньшей мере один наблюдаемый объект, хранения расстояния от измерительной станции до опорного объекта, принятия и обработки интервалов времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационных номеров от опорного объекта и от по меньшей мере одного наблюдаемого объекта и вычисления расстояния от измерительной станции до по меньшей мере одного наблюдаемого объекта на основе известности расстояния от измерительной станции до опорного объекта, интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала, принятого от соответствующего по меньшей мере одного наблюдаемого объекта, и интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала, принятого от опорного объекта, при этом быстрый сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной электромагнитной волны, медленный сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной звуковой волны,
[0024] - опорный объект, предназначенный для размещения на стационарной опоре на заданном расстоянии от измерительной станции и выполненный с возможностью принятия быстрого сигнала, фиксации момента приёма быстрого сигнала, принятия медленного сигнала, фиксации момента приёма медленного сигнала, хранения своего идентификационного номера, вычисления интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и передачи интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и своего идентификационного номера в измерительную станцию,
[0025] - по меньшей мере один наблюдаемый объект, выполненный с возможностью принятия быстрого сигнала, фиксации момента приёма быстрого сигнала, принятия медленного сигнала, фиксации момента приёма медленного сигнала, хранения своего идентификационного номера, вычисления интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и передачи интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и своего идентификационного номера в измерительную станцию.
[0026] В дополнительном аспекте система по первому варианту характеризуется тем, что измерительная станция дополнительно выполнена с возможностью запроса интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационного номера от опорного объекта и с возможностью запроса интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационного номера от по меньшей мере одного наблюдаемого объекта.
[0027] В дополнительном аспекте система по первому варианту характеризуется тем, что измерительная станция дополнительно выполнена с возможностью передачи данных в по меньшей мере одно внешнее устройство.
[0028] В дополнительном аспекте система по первому варианту характеризуется тем, что данные содержат по меньшей мере один результат вычисления расстояния от измерительной станции до по меньшей мере одного наблюдаемого объекта и его идентификационный номер.
[0029] В дополнительном аспекте система по первому варианту характеризуется тем, что опорный объект и(или) по меньшей мере один наблюдаемый объект выполнены с возможностью селекции полезных медленных сигналов от мешающих медленных сигналов.
[0030] Технический результат достигается за счёт того, что способ измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по второму варианту содержит этапы, на которых:
[0031] - передают одновременно синхронизирующий быстрый сигнал и медленный сигнал от измерительной станции в опорный объект и в по меньшей мере один наблюдаемый объект, при этом синхронизирующий быстрый сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной электромагнитной волны, и содержит данные о времени в измерительной станции, медленный сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной звуковой волны, опорный объект расположен на заданном расстоянии от измерительной станции, а по меньшей мере один наблюдаемый объект расположен между измерительной станцией и опорным объектом и выполнен с возможностью перемещения,
[0032] - фиксируют момент передачи медленного сигнала в измерительной станции,
[0033] - принимают синхронизирующий быстрый сигнал в опорном объекте и в по меньшей мере одном наблюдаемом объекте,
[0034] - синхронизируют время в опорном объекте и в по меньшей мере одном наблюдаемом объекте с временем в измерительной станции,
[0035] - принимают медленный сигнал в опорном объекте и в по меньшей мере одном наблюдаемом объекте,
[0036] - фиксируют момент приёма медленного сигнала в опорном объекте и момент приёма медленного сигнала в по меньшей мере одном наблюдаемом объекте,
[0037] - передают момент приёма медленного сигнала и идентификационный номер от опорного объекта и момент приёма медленного сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта в измерительную станцию,
[0038] - принимают момент приёма медленного сигнала и идентификационный номер от опорного объекта и момент приёма медленного сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта в измерительной станции,
[0039] - вычисляют интервал времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала для опорного объекта и интервал времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала для по меньшей мере одного наблюдаемого объекта в измерительной станции,
[0040] - вычисляют расстояние от измерительной станции до по меньшей мере одного наблюдаемого объекта в измерительной станции на основе известности расстояния от измерительной станции до опорного объекта, интервала времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала, вычисленного для соответствующего по меньшей мере одного наблюдаемого объекта, и интервала времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала, вычисленного для опорного объекта.
[0041] В дополнительном аспекте способ по второму варианту характеризуется тем, что перед этапом, на котором передают моменты приёма медленного сигнала и идентификационные номера от опорного объекта и от по меньшей мере одного наблюдаемого объекта, он дополнительно содержит этап, на котором:
[0042] - запрашивают момент приёма медленного сигнала и идентификационный номер от опорного объекта и момент приёма медленного сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта из измерительной станции.
[0043] Технический результат достигается за счёт того, что система для измерения дальности до перемещающихся наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды для осуществления способа по второму варианту содержит:
[0044] - измерительную станцию, выполненную с возможностью передачи одновременно синхронизирующего быстрого сигнала и медленного сигнала в опорный объект и по меньшей мере один наблюдаемый объект, фиксации момента передачи медленного сигнала, принятия и обработки моментов принятия медленного сигнала и идентификационных номеров от опорного объекта и от по меньшей мере одного наблюдаемого объекта, хранения расстояния от измерительной станции до опорного объекта, вычисления интервалов времени между моментом принятия медленного сигнала и моментом передачи медленного сигнала для опорного объекта и для по меньшей мере одного наблюдаемого объекта и по меньшей мере одного вычисления расстояния от измерительной станции до по меньшей мере одного наблюдаемого объекта на основе известности расстояния от измерительной станции до опорного объекта, интервала времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала, вычисленного для соответствующего по меньшей мере одного наблюдаемого объекта, и интервала времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала, вычисленного для опорного объекта, при этом синхронизирующий быстрый сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной электромагнитной волны, и содержит данные о времени в измерительной станции, медленный сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной звуковой волны,
[0045] - опорный объект, предназначенный для размещения на стационарной опоре на заданном расстоянии от измерительной станции и выполненный с возможностью принятия синхронизирующего быстрого сигнала, синхронизации своего времени с временем измерительной станции, принятия медленного сигнала, фиксации момента приёма медленного сигнала, хранения своего идентификационного номера, передачи момента принятия медленного сигнала и своего идентификационного номера в измерительную станцию,
[0046] - наблюдаемый объект, выполненный с возможностью принятия синхронизирующего быстрого сигнала, синхронизации своего времени с временем измерительной станции, принятия медленного сигнала, фиксации момента приёма медленного сигнала, хранения своего идентификационного номера, передачи момента принятия медленного сигнала и своего идентификационного номера в измерительную станцию.
[0047] В дополнительном аспекте система по второму варианту характеризуется тем, что измерительная станция дополнительно выполнена с возможностью запроса момента приёма медленного сигнала и идентификационного номера от опорного объекта и с возможностью запроса момента приёма медленного сигнала и идентификационного номера от по меньшей мере одного наблюдаемого объекта.
[0048] В дополнительном аспекте система по второму варианту характеризуется тем, что измерительная станция дополнительно выполнена с возможностью передачи данных в по меньшей мере одно внешнее устройство.
[0049] В дополнительном аспекте система по второму варианту характеризуется тем, что данные содержат по меньшей мере один результат вычисления расстояния от измерительной станции до по меньшей мере одного наблюдаемого объекта.
[0050] В дополнительном аспекте система по второму варианту характеризуется тем, что опорный объект и(или) по меньшей мере один наблюдаемый объект выполнены с возможностью селекции полезных медленных сигналов от мешающих медленных сигналов.
Краткое описание чертежей
[0051] На Фиг. 1 представлена блок-схема системы измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения.
[0052] На Фиг. 2 представлена функциональная схема измерительной станции системы измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения.
[0053] На Фиг. 3 представлена функциональная схема одного из объектов системы измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения.
[0054] На Фиг. 4 схематично представлен вариант использования системы измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения.
[0055] На Фиг. 5 представлена блок-схема способа работы системы измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения.
[0056] На Фиг. 6 представлена блок-схема системы измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения.
[0057] На Фиг. 7 представлена функциональная схема измерительной станции системы измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения.
[0058] На Фиг. 8 представлена функциональная схема одного из объектов системы измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения.
[0059] На Фиг. 9 схематично представлен вариант использования системы измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения.
[0060] На Фиг. 10 представлена блок-схема способа измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения.
Осуществление изобретения
[0061] На Фиг. 1 представлено схематичное представление системы 1 измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения (далее - Система’ 1). Система’ 1 включает в себя стационарную измерительную станцию 2 и множество объектов 3: первый объект 3A, второй объект 3B и третий объект 3C. Объекты 3 Системы’ 1 расположены на расстоянии Ln от измерительной станции 2, где n - идентификационный, например, порядковый, номер объекта 3.
[0062] Первый объект 3A (далее - опорный объект 3A) Системы’ 1 предназначен для размещения на стационарной опоре, расположен в заданном месте, на заданном известном расстоянии L0 от измерительной станции 2 (L0=const) и предпочтительно наиболее удалён от измерительной станции 2. Идентификационный номер n опорного объекта 3A - 0.
[0063] Второй объект 3B (далее - первый наблюдаемый объект 3B) Системы’ 1 и третий объект 3C (далее - второй наблюдаемый объект 3C) Системы’ 1 предназначены для размещения на внешних подвижных устройствах, являются промежуточными, выполнены с возможностью перемещения (когда закреплены на подвижных устройствах) и жёсткого закрепления на соответствующем внешнем подвижном устройстве, расположены на расстоянии Li от измерительной станции 2 и между измерительной станцией 2 и опорным объектом 3A (Li < L0), где i - порядковый номер наблюдаемого объекта 3B, 3C. Первый наблюдаемый объект 3B расположен на расстоянии L1 от измерительной станции 2, а второй наблюдаемый объект 3C расположен на расстоянии L2 от измерительной станции 2. Идентификационный номер n первого наблюдаемого объекта 3B - 1. Идентификационный номер n второго наблюдаемого объекта 3C - 2.
[0064] Пространство между измерительной станцией 2 и опорным объектом 3A, наблюдается и контролируется измерительной станцией 2, при этом в этом пространстве расположено по меньшей мере одно внешнее подвижное устройство, на котором может быть закреплён соответствующий наблюдаемый объект 3B, 3C. Также в упомянутом пространстве, наблюдаемом и контролируемом измерительной станцией 2, может располагаться по меньшей мере один посторонний объект, который может быть выполнен с возможностью перемещения, при этом расстояние между по меньшей мере одним посторонним объектом и измерительной станцией 2 может изменяться.
[0065] На Фиг. 2 представлена измерительная станция 2 Системы’ 1. Измерительная станция 2 включает в себя радиоволновой излучатель 4, ультразвуковой излучатель 5, радиоволновой приёмник 6, измеритель 7 времени, обрабатывающий блок 8 и блок 9 связи. Радиоволновый излучатель 4 содержит по меньшей мере одно известное из уровня техники радиопередающее устройство и выполнен с возможностью передачи радиоимпульсов 10 и запросных радиосигналов 12, каждый из которых является адресным и содержащим по меньшей мере один идентификационный номер n объекта 3. Ультразвуковой излучатель 5 содержит по меньшей мере одно известное из уровня техники ультразвуковое передающее устройство и выполнен с возможностью передачи зондирующих ультразвуковых импульсов 11. Радиоволновой приёмник 6 содержит по меньшей мере одно известное из уровня техники радиоприёмное устройство и выполнен с возможностью принятия ответных радиосигналов 13. Измеритель 7 времени включает в себя по меньшей мере одно известное из уровня техники средство измерения интервала времени, например, часы и(или) таймер, и обеспечивает выполнение измерительной станцией 2 последовательностей различных операций с заданными интервалами времени, в частности, последовательность одновременных передач радиоимпульса 10 и зондирующего ультразвукового импульса 11 для объектов 3, последовательность передач запросного радиосигнала 12. Обрабатывающий блок 8 может включать в себя по меньшей мере один известный из уровня техники микропроцессор и по меньшей мере один известный из уровня техники машиночитаемый носитель и выполнен с возможностью приёма сигналов и их обработки, а также приёма, обработки и хранения данных, в частности, интервалов T времени, идентификационных номеров n объектов 3, расстояния L0 от измерительной станции 2 до опорного объекта 3A, по меньшей мере одного вычисленного расстояния Li от измерительной станции 2 до i-ого наблюдаемого объекта 3B, 3C, время и дату по меньшей мере одного измерения и(или) вычисления. Блок 9 связи может содержать по меньшей мере одно известное из уровня техники устройство передачи данных и выполнен с возможностью передачи данных, например, принятых от обрабатывающего блока 8, по известному из уровня техники каналу связи, например, проводному и(или) беспроводному, посредством по меньшей мере одного известного из уровня техники протокола передачи данных, например, стандартного и(или) проприетарного, в по меньшей мере одно внешнее устройство, например, известный из уровня техники машиночитаемый носитель, устройство системы контроля положения и перемещения наблюдаемых объектов. Измерительная станция 2 выполнена с возможностью, в частности, с заданным интервалом T’’ времени передачи одновременно радиоимпульса 10 и зондирующего ультразвукового импульса 11 в объекты 3, с заданным интервалом Т’ времени передачи запросного радиосигнала 12 в объекты 3, принятия и обработки ответных радиосигналов 13 от объектов 3, хранения расстояния L0 от измерительной станции 2 до опорного объекта 3A, вычисления расстояния Li до i-ого наблюдаемого объекта 3B, 3C и передачи данных в по меньшей мере одно внешнее устройство, при этом упомянутые данные могут содержать по меньшей мере один результат вычисления расстояния Li от измерительной станции 2 до i-ого наблюдаемого объекта 3B, 3C и его идентификационный номер n.
[0066] Расстояние Li от измерительной станции 2 до i-ого наблюдаемого объекта 3 равно:
[0067] Li = L0*dturi/dtur0,
[0068] где dturi - интервал времени между моментом tu приёма зондирующего ультразвукового импульса 11 и моментом tr приёма радиоимпульса 10, принятый от i-ого наблюдаемого объекта 3B, 3C, dtur0 - интервал времени между моментом tu приёма зондирующего ультразвукового импульса 11 и моментом tr приёма радиоимпульса 10, принятый от опорного объекта 3A.
[0069] Расстояние L1 от измерительной стации 2 до первого наблюдаемого объекта 3B: L1 = L0*dtur1/dtur0.
[0070] Расстояние L2 от измерительной стации 2 до второго наблюдаемого объекта 3C: L2 = L0*dtur2/dtur0.
[0071] На Фиг. 3 представлена функциональная схема объекта 3 (опорного или наблюдаемого) Системы’ 1. Объект 3 включает в себя радиоволновый приёмник 14, ультразвуковой приёмник 15, радиоволновый излучатель 16, измеритель 17 времени и обрабатывающий блок 18. Радиоволновой приёмник 14 содержит по меньшей мере одно известное из уровня техники радиоприёмное устройство и выполнен с возможностью принятия радиоимпульсов 10 и запросных радиосигналов 12. Ультразвуковой приёмник 15 содержит по меньшей мере одно известное из уровня техники ультразвуковое приёмное устройство и выполнен с возможностью принятия зондирующих ультразвуковых импульсов 11. Радиоволновый излучатель 16 включает в себя по меньшей мере одно известное из уровня техники радиопередающее устройство и выполнен с возможностью передачи ответных радиосигналов 13, например, с данными, принятыми от обрабатывающего блока 18. Измеритель 17 времени включает в себя по меньшей мере одно известное из уровня техники средство измерения интервала времени, например, таймер, и необходим для измерения интервала dtur времени между моментом tu приёма зондирующего ультразвукового импульса 11 и моментом tr приёма радиоимпульса 10. Обрабатывающий блок 18 может включать в себя по меньшей мере один известный из уровня техники микропроцессор и по меньшей мере один известный из уровня техники машиночитаемый носитель и выполнен с возможностью обработки принятых импульсов 10, 11 и сигналов 12, приёма, обработки, хранения и передачи данных, в частности, по меньшей мере одного значения интервала dtur времени между моментом tu приёма зондирующего ультразвукового импульса 11 и моментом tr приёма радиоимпульса 10 и своего идентификационного номера n, хранения по меньшей мере одного момента tu приёма зондирующего ультразвукового импульса 11 и по меньшей мере одного момента tr приёма радиоимпульса 10, выделения из запросного радиосигнала 12 по меньшей мере одного идентификационного номера n объекта 3 и сравнения выделенного из принятого запросного радиосигнала 12 по меньшей мере одного идентификационного номера n объекта 3 с записанным в нём идентификационным номером n. Объект 3 выполнен с возможностью, в частности, принятия от измерительной станции 2 радиоимпульса 10, фиксации момента tr приёма радиоимпульса 10, принятия зондирующего ультразвукового импульса 11, фиксации момента tu приёма зондирующего ультразвукового импульса 11, принятия по меньшей мере одного запросного радиосигнала 12 от измерительной станции 2, хранения своего идентификационного номера n, вычисления интервала dtur времени между моментом tu приёма зондирующего ультразвукового импульса 11 и моментом tr приёма радиоимпульса 10 (dtur = tu - tr), передачи данных по запросу, переданного посредством запросного радиосигнала 12, от измерительной станции 2 в измерительную станцию 2, в частности, по меньшей мере одного интервала dtur времени между моментом tu приёма зондирующего ультразвукового импульса 11 и моментом tr приёма радиоимпульса 10 и своего идентификационного номера n.
[0072] На Фиг. 4 схематично представлен вариант использования Системы’ 1 на электрифицированной железной дороге для контроля состояния контактной подвески: натяжения несущего троса 19, контактного провода 20 и работу компенсирующих устройств, - которая обеспечивает безопасность движения железнодорожного транспорта. Каждое подвижное внешнее устройство представляет собой груз 21 грузокомпенсатора, выполнено с возможностью перемещения по вертикали. Измерительная станция 2 установлена в верхней части анкерной опоры 22 контактной подвески. Опорный объект 3A установлен в нижней части анкерной опоры 22 контактной подвески. Первый наблюдаемый объект 3B закреплён на грузе 21A грузокомпенсатора несущего троса 19. Второй наблюдаемый объект 3C закреплён на грузе 21B грузокомпенсатора контактного провода 20.
[0073] На Фиг. 5 представлен способ 23 измерения дальности до перемещающихся наблюдаемых объектов 3B, 3C в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения (далее - Способ’ 23), который содержит следующие этапы 24.
[0074] На этапе 24A передают одновременно радиоимпульс 10 и зондирующий ультразвуковой импульс 11 от измерительной станции 2 в направлении объектов 3.
[0075] На этапе 24B принимают радиоимпульс 10 и фиксируют момент trn приёма радиоимпульса 10 в обрабатывающем блоке 18 каждого n-ого объекта 3. Так, в обрабатывающем блоке 18 опорного объекта 3A фиксируют момент tr0 приёма радиоимпульса 10, обрабатывающем блоке 18 первого наблюдаемого объекта 3B - момент tr1 приёма радиоимпульса 10, обрабатывающем блоке 18 второго наблюдаемого объекта 3C - момент tr2 приёма радиоимпульса 10.
[0076] На этапе 24C принимают зондирующий ультразвуковой импульс 11 и фиксируют момент tun приёма зондирующего ультразвукового импульса 11 по показаниям от измерителя 17 времени в обрабатывающем блоке 18 каждого n-ого объекта 3. Так, в обрабатывающем блоке 18 опорного объекта 3A фиксируют момент tu0 приёма зондирующего ультразвукового импульса 11, обрабатывающем блоке 18 первого наблюдаемого объекта 3B - момент tu1 приёма зондирующего ультразвукового импульса 11, обрабатывающем блоке 18 второго наблюдаемого объекта 3C - момент tu2 приёма зондирующего ультразвукового импульса 11.
[0077] На этапе 24D вычисляют интервал dturn времени между моментом tun приёма зондирующего ультразвукового импульса 11 и моментом trn приёма радиоимпульса 10 и записывают вычисленное значение интервала dturn времени между моментом tu приёма зондирующего ультразвукового импульса 11 и моментом trn приёма радиоимпульса 10 в обрабатывающем блоке 18 каждого n-ого объекта 3. Так, в обрабатывающем блоке 18 опорного объекта 3A вычисляют и записывают интервал dtur0 времени между моментом tu0 приёма зондирующего ультразвукового импульса 11 и моментом tr0 приёма радиоимпульса 10, в обрабатывающем блоке 18 первого наблюдаемого объекта 3B - интервал dtur1 времени между моментом tu1 приёма зондирующего ультразвукового импульса 11 и моментом tr1 приёма радиоимпульса 10, в обрабатывающем блоке 18 второго наблюдаемого объекта 3C - интервал dtur2 времени между моментом tu2 приёма зондирующего ультразвукового импульса 11 и моментом tr2 приёма радиоимпульса 10.
[0078] На этапе 24E через заданный интервал T’ времени, например, равный времени распространения зондирующего ультразвукового импульса 11 от измерительной станции 2 до опорного объекта 3A, передают запросный радиосигнал 12 от измерительной станции 2 в каждый объект 3.
[0079] На этапе 24F принимают запросный радиосигнал 12 от измерительной станции 2 в каждом n-ом объекте 3.
[0080] На этапе 24G передают ответные радиосигналы 13 с информацией об интервале dturn времени между моментом tun приёма зондирующего ультразвукового импульса 11 и моментом trn приёма радиоимпульса 10 и идентификационном номере n соответствующего объекта 3 от каждого n-ого объекта 3 в измерительную станцию 2.
[0081] На этапе 24H принимают ответные радиосигналы 13 от n-ого каждого объекта 3 в измерительной станции 2.
[0082] На этапе 24I вычисляют расстояние Li от измерительной станции 2 до i-ого наблюдаемого объекта 3B, 3C в измерительной станции 2.
[0083] На этапе 24J передают данные, например, результаты вычисления расстояний Li от измерительной станции 2 до i-ого наблюдаемого объекта 3B, 3C с привязкой ко времени проведённого измерения, их идентификационные номера n, из измерительной станции 2 в по меньшей мере одно внешнее устройство.
[0084] Для измерения расстояния Li до i-ого наблюдаемого объекта 3 этапы 24 Способа’ 23 повторяют заданное количество раз, например, в неавтоматическом режиме или в автоматическом режиме через по меньшей мере один заданный интервал T’ времени.
[0085] Поскольку Li<L0, то dturi < dtur0, где dtur0 - интервал времени между моментом tu0 приёма зондирующего ультразвукового импульса 11 и моментом tr0 приёма радиоимпульса 10, вычисленный в опорном объекте 3A, dturi - интервал времени между моментом tui приёма зондирующего ультразвукового импульса 11 и моментом tri приёма радиоимпульса 10, вычисленный в i-м наблюдаемом объекте 3. Иными словами, каждый i-ый наблюдаемый объект 3 принимает зондирующий ультразвуковой импульс 11 ранее опорного объекта 3A.
[0086] На Фиг. 6 представлено схематичное представление системы 25 измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения (далее - Система’’ 25). Система 25 включает в себя стационарную измерительную станцию 26 и множество объектов 27: первый объект 27A, второй объект 27B и третий объект 27C. Объекты 27 Системы’’ 25 расположены на расстоянии Ln от измерительной станции 26, где n - идентификационный, например, порядковый, номер объекта 27.
[0087] Первый объект 27A (далее - опорный объект 27A) Системы’’ 25 предназначен для размещения на стационарной опоре, расположен в заданном месте, на заданном известном расстоянии L0 от измерительной станции 26 (L0=const) и предпочтительно наиболее удалён от измерительной станции 26. Идентификационный номер n опорного объекта 27A - 0.
[0088] Второй объект 27B (далее - первый наблюдаемый объект 27B) Системы’’ 25 и третий объект 27C (далее - второй наблюдаемый объект 27C) Системы’’ 25 предназначены для размещения на внешних подвижных устройствах, являются промежуточными, выполнены с возможностью перемещения (когда закреплены на подвижных устройствах) и жёсткого закрепления на соответствующем внешнем подвижном устройстве, расположены на расстоянии Li от измерительной станции 26 и между измерительной станцией 26 и опорным объектом 27A (Li < L0), где i - порядковый номер опорного объекта 27B, 27C. Первый наблюдаемый объект 27B расположен на расстоянии L1 от измерительной станции 26, а второй наблюдаемый объект 27C расположен на расстоянии L2 от измерительной станции 26. Идентификационный номер n первого наблюдаемого объекта 27B - 1. Идентификационный номер n второго наблюдаемого объекта 27C - 2.
[0089] Пространство между измерительной станцией 26 и опорным объектом 27A, наблюдается и контролируется измерительной станцией 26, при этом в этом пространстве расположено по меньшей мере одно внешнее подвижное устройство, на котором может быть закреплён соответствующий наблюдаемый объект 27B, 27C. Также в упомянутом пространстве, наблюдаемом и контролируемом измерительной станцией 26, может располагаться по меньшей мере один посторонний объект, который может быть выполнен с возможностью перемещения, при этом расстояние между по меньшей мере одним посторонним объектом и измерительной станцией 26 может изменяться.
[0090] На Фиг. 7 представлена измерительная станция 26 Системы’’ 25. Измерительная станция 26 включает в себя радиоволновой излучатель 28, ультразвуковой излучатель 29, радиоволновой приёмник 30, измеритель 31 времени, обрабатывающий блок 32 и блок 33 связи. Радиоволновый излучатель 28 содержит по меньшей мере одно известное из уровня техники радиопередающее устройство и выполнен с возможностью передачи синхронизирующих радиосигналов 34 и запросных радиосигналов 36, каждый из которых является адресным и содержащим по меньшей мере один идентификационный номер n объекта 27, при этом синхронизирующий радиосигнал 34 содержит данные о времени в измерительной станции 26 и предназначен для синхронизации времени объектов 27 с временем измерительной станции 26. Ультразвуковой излучатель 29 содержит по меньшей мере одно известное из уровня техники ультразвуковое передающее устройство и выполнен с возможностью передачи зондирующих ультразвуковых импульсов 35. Радиоволновой приёмник 30 содержит по меньшей мере одно известное из уровня техники радиоприёмное устройство и выполнен с возможностью принятия ответных радиосигналов 37. Измеритель 31 времени включает в себя по меньшей мере одно известное из уровня техники средство измерения интервала времени, например, часы и(или) таймер, и обеспечивает выполнение измерительной станцией 26 последовательностей различных операций с заданными интервалами времени, в частности, последовательность одновременных передач синхронизирующего радиосигнала 34 и зондирующего ультразвукового импульса 35 для объектов 27, последовательность передач запросного радиосигнала 36. Обрабатывающий блок 32 может включать в себя по меньшей мере один известный из уровня техники микропроцессор и по меньшей мере один известный из уровня техники машиночитаемый носитель и выполнен с возможностью, в частности, приёма сигналов и их обработки, а также приёма, обработки, хранения и передачи данных, в частности, интервалов T времени, идентификационных номеров n объектов 27, по меньшей мере одного момента tut передачи зондирующего ультразвукового импульса 35, расстояния L0 от измерительной станции 26 до опорного объекта 27A, по меньшей мере одного вычисленного интервала времени dtuu между моментом tur приёма зондирующего ультразвукового импульса 35 и моментом tut передачи зондирующего ультразвукового импульса 35, по меньшей мере одного вычисленного расстояния Li от измерительной станции 26 до i-ого наблюдаемого объекта 27B, 27C, время и дату по меньшей мере одного измерения и(или) вычисления. Блок 33 связи может содержать по меньшей мере одно известное из уровня техники устройство передачи данных и выполнен с возможностью передачи данных, например, принятых от обрабатывающего блока 32, по известному из уровня техники каналу связи, например, проводному и(или) беспроводному, посредством по меньшей мере одного известного из уровня техники протокола передачи данных, например, стандартного и(или) проприетарного, в по меньшей мере одно внешнее устройство, например, известный из уровня техники машиночитаемый носитель, устройство системы контроля положения и перемещения наблюдаемых объектов. Измерительная станция 26 выполнена с возможностью, в частности, с заданным интервалом T’’ времени передачи одновременно синхронизирующего радиосигнала 34 для синхронизации времени между измерительной станцией 26, опорным объектом 27A и наблюдаемыми объектами 27B, 27C и зондирующего ультразвукового импульса 35 в объекты 27, с заданным интервалом времени T’ передачи запросного радиосигнала 36 в объекты 27, фиксации моментов tut передачи зондирующего ультразвукового импульса 35, принятия и обработки ответных радиосигналов 37 от объектов 27, хранения расстояния L0 от измерительной станции 26 до опорного объекта 27A, вычисления интервалов времени dtuun между моментом turn приёма зондирующего ультразвукового импульса 35 и моментом tutn передачи зондирующего ультразвукового импульса 35 для каждого n-ого объекта 27 (dtuun = turn - tutn), вычисления расстояния Li до i-ого наблюдаемого объекта 27B, 27C и передачи данных в по меньшей мере одно внешнее устройство, при этом упомянутые данные могут содержать по меньшей мере один результат вычисления расстояния Li от измерительной станции 26 до i-ого наблюдаемого объекта 27B, 27C и его идентификационный номер n.
[0091] Расстояние Li от измерительной станции 26 до i-ого наблюдаемого объекта 27 равно:
[0092] Li = L0*dtuui/dtuu0,
[0093] где dtuui - интервал времени между моментом tur приёма зондирующего ультразвукового импульса 35 и моментом tut передачи зондирующего ультразвукового импульса 35, принятый от i-ого наблюдаемого объекта 27B, 27C, dtuu0 - интервал времени между моментом tur приёма зондирующего ультразвукового импульса 35 и моментом tut передачи зондирующего ультразвукового импульса 35, принятый от опорного объекта 27A.
[0094] Расстояние L1 от измерительной стации 26 до первого наблюдаемого объекта 27B: L1 = L0*dtuu1/dtuu0.
[0095] Расстояние L2 от измерительной стации 26 до второго наблюдаемого объекта 27С: L2 = L0*dtuu2/dtuu0.
[0096] На Фиг. 8 представлена функциональная схема объекта 27 (опорного или наблюдаемого) Системы’’ 25. Объект 27 включает в себя радиоволновый приёмник 38, ультразвуковой приёмник 39, радиоволновый излучатель 40, измеритель времени 41 и обрабатывающий блок 42. Радиоволновой приёмник 38 содержит по меньшей мере одно известное из уровня техники радиоприёмное устройство и выполнен с возможностью принятия синхронизирующих радиосигналов 34 и запросных радиосигналов 36. Ультразвуковой приёмник 39 содержит по меньшей мере одно известное из уровня техники ультразвуковое приёмное устройство и выполнен с возможностью принятия зондирующих ультразвуковых импульсов 35. Радиоволновый излучатель 40 включает в себя по меньшей мере одно известное из уровня техники радиопередающее устройство и выполнен с возможностью передачи ответных радиосигналов 37 например, с данными, принятыми от обрабатывающего блока 18. Измеритель времени 41 включает в себя по меньшей мере одно известное из уровня техники средство измерения интервала времени, например, часы, и необходим для синхронизации времени между измерительной станцией 26 и объектом 27. Обрабатывающий блок 42 может включать в себя по меньшей мере один известный из уровня техники микропроцессор и по меньшей мере один известный из уровня техники машиночитаемый носитель и выполнен с возможностью обработки принятых зондирующих ультразвуковых импульсов 35 и сигналов 34, 36, приёма, обработки, хранения и передачи данных, в частности, по меньшей мере одного момента приёма tur зондирующего ультразвукового импульса 35 и идентификационного номера n, управления измерителем времени 41 для синхронизации времени между измерительной станцией 26 и объектом 27 на основе данных из синхронизирующего радиосигнала 34, выделения из запросного радиосигнала 36 по меньшей мере одного идентификационного номера n объекта 27 и сравнения выделенного из принятого запросного радиосигнала 36 по меньшей мере одного идентификационного номера n объекта 27 с записанным в нём идентификационным номером n. Объект 27 выполнен с возможностью, в частности, принятия от измерительной станции 26 синхронизирующего радиосигнала 34, синхронизации своего времени с временем в измерительной станции 26, принятия зондирующего ультразвукового импульса 35, фиксации момента приёма tur зондирующего ультразвукового импульса 35, принятия запросного радиосигнала 36, хранения своего идентификационного номера n, передачи данных по запросу, переданного посредством запросного радиосигнала 36, от измерительной станции 26 в измерительную станцию 26, в частности, по меньшей мере одного момента приёма tur зондирующего ультразвукового импульса 35 и идентификационного номера n.
[0097] На Фиг. 9 схематично представлен вариант использования Системы’’ 25 на электрифицированной железной дороге для контроля состояния контактной подвески: натяжения несущего троса 19, контактного провода 20 и работу компенсирующих устройств, - которая обеспечивает безопасность движения железнодорожного транспорта. Каждое подвижное внешнее устройство представляет собой груз 21 грузокомпенсатора, выполнено с возможностью перемещения по вертикали. Измерительная станция 26 установлена в верхней части анкерной опоры 22 контактной подвески. Опорный объект 27A установлен в нижней части анкерной опоры 22 контактной подвески. Первый наблюдаемый объект 27B закреплён на грузе 21A грузокомпенсатора несущего троса 19. Второй наблюдаемый объект 27C закреплён на грузе 21B грузокомпенсатора контактного провода 20.
[0098] На Фиг. 10 представлен способ 43 измерения дальности до перемещающихся наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения (далее - Способ’’ 43), который содержит следующие этапы 44.
[0099] На этапе 44A передают одновременно синхронизирующий радиосигнал 34 для синхронизации времени между измерительной станцией 26, опорным объектом 27A и наблюдаемыми объектами 27B, 27C и зондирующий ультразвуковой импульс 35 в опорный объект 27A и в наблюдаемые объекты 27B, 27C из измерительной станции 26.
[0100] На этапе 44B фиксируют момент tut времени передачи зондирующего ультразвукового импульса 35 в опорный объект 27A и наблюдаемые объекты 27B, 27C по показаниям измерителя 31 времени в обрабатывающем блоке 32 измерительной станции 26.
[0101] На этапе 44C принимают синхронизирующий радиосигнал 34 в опорном объекте 27A и в наблюдаемых объектах 27B, 27C.
[0102] На этапе 44D синхронизируют время в опорном объекте 27A и в наблюдаемых объектах 27B, 27C с временем в измерительной станции 26.
[0103] На этапе 44E принимают зондирующий ультразвуковой импульс 35 в опорном объекте 27A и в наблюдаемых объектах 27B, 27C.
[0104] На этапе 44F фиксируют моменты turn приёмов зондирующего ультразвукового импульса 35 в опорном объекте 27A и в наблюдаемых объектах 27B, 27C. Так, в обрабатывающем блоке 42 опорного объекта 27A фиксируют момент tur0 приёма зондирующего ультразвукового импульса 35, в обрабатывающем блоке 42 первого наблюдаемого объекта 27B - момент tur1 приёма зондирующего ультразвукового импульса 35, в обрабатывающем блоке 42 второго наблюдаемого объекта 27C - момент tur2 приёма зондирующего ультразвукового импульса 35.
[0105] На этапе 44G через заданный интервал T’’ времени, например, равный времени распространения зондирующего ультразвукового импульса 35 от измерительной станции 26 до опорного объекта 27A, передают запросный радиосигнал 36 от измерительной станции 26 в опорный объект 27A и в наблюдаемые объекты 27B, 27C.
[0106] На этапе 44H принимают запросный радиосигнал 36 от измерительной станции 26 в опорном объекте 27A и в наблюдаемых объектах 27B, 27C.
[0107] На этапе 44I передают ответные радиосигналы 37 с данными, содержащими моменты turn приёмов зондирующего ультразвукового импульса 35 и идентификационные номера n, из опорного объекта 27A и из наблюдаемых объектов 27B, 27C в измерительную станцию 26.
[0108] На этапе 44J принимают ответные радиосигналы 37 с данными, содержащими моменты turn приёмов зондирующего ультразвукового импульса 35 и идентификационные номера n, из опорного объекта 27A и из наблюдаемых объектов 27B, 27C в измерительной станции 26.
[0109] На этапе 44K вычисляют интервалы dtuun времени между моментом turn приёма зондирующего ультразвукового импульса 35 и моментом tutn передачи зондирующего ультразвукового импульса 35 для опорного объекта 27A и для наблюдаемых объектов 27B, 27C в измерительной станции 26. Так, в обрабатывающем блоке 32 измерительной станции 26 вычисляют и записывают интервал dtuu0 времени между моментом tur0 приёма зондирующего ультразвукового импульса 35 и моментом tut передачи зондирующего ультразвукового импульса 35 для опорного объекта 27A, интервал dtuu1 времени между моментом tur1 приёма зондирующего ультразвукового импульса 35 и моментом tut передачи зондирующего ультразвукового импульса 35 для первого наблюдаемого объекта 27B, интервал dtuu2 времени между моментом tur2 приёма зондирующего ультразвукового импульса 35 и моментом tut передачи зондирующего ультразвукового импульса 35 для второго наблюдаемого объекта 27C.
[0110] На этапе 44L вычисляют расстояние Li от измерительной станции 26 до i-ого наблюдаемого объекта 27B, 27C в измерительной станции 26.
[0111] На этапе 44M передают данные, например, результаты вычисления расстояний Li от измерительной станции 26 до i-ого наблюдаемого объекта 27B, 27C с привязкой ко времени проведённого измерения (вычисления), их идентификационные номера n, из измерительной станции 26 в по меньшей мере одно внешнее устройство.
[0112] Для измерения расстояния Li до i-ого наблюдаемого объекта 27 этапы 44 Способа’’ 43 могут повторять заданное количество раз, например, в неавтоматическом режиме или в автоматическом режиме через по меньшей мере один заданный интервал T’ времени.
[0113] Поскольку Li<L0, то dtuui < dtuu0, где dtuu0 – интервал времени между моментом tur0 приёма зондирующего ультразвукового импульса 35 и моментом tut передачи зондирующего ультразвукового импульса 35 для опорного объекта 27A, dtuui – интервал времени между моментом turi приёма зондирующего ультразвукового импульса 35 и моментом tuti передачи зондирующего ультразвукового импульса 35 для i-ого наблюдаемого объекта 27. Иными словами, каждый i-ый наблюдаемый объект 27 принимает зондирующий ультразвуковой импульс 35 ранее опорного объекта 27A.
[0114] Решение технической проблемы и достижение технического результата продемонстрированы выше на вариантах выполнения предложенных технических решений. Специалисту в данной области техники очевидны иные варианты осуществления тех или иных признаков предложенных технических решений с использованием известных из уровня техники материально-технических средств.
[0115] В других вариантах выполнения предложенных технических решений система 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды может включать в себя опорный объект 3, 27 и по меньшей мере один наблюдаемый объект 3, 27.
[0116] Опорный объект 3, 27 системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды расположен на заданном расстоянии от измерительной станции 2 и закреплён на опоре, например, на стационарном объекте. Опорный объект 3, 27 предпочтительно является наиболее удалённым от измерительной станции 2, 26 объектом 3, 27, поскольку при таком расположении опорного объекта 3, 27 осуществляется учёт среды распространения сигнала (в том числе импульса) во всём диапазоне перемещения наблюдаемых объектов 3, 27.
[0117] По меньшей мере один или каждый наблюдаемый объект 3, 27 системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды выполнен с возможностью закрепления на подвижном внешнем устройстве и предпочтительно расположен в пространстве между измерительной станцией 2, 26 и упомянутым опорным объектом 3, 27. Если по меньшей мере один или каждый наблюдаемый объект 3, 27 закреплён на подвижном устройстве, то он выполнен с возможностью перемещения.
[0118] В других вариантах выполнения предложенных технических решений вместо радиоимпульса 10, радиосигнала 34, запросного сигнала 12, 36, ответного радиосигнала 13, 37 может быть использован по меньшей мере один известный из уровня техники быстрый (электромагнитный) сигнал. Быстрый сигнал представляет сигнал, передаваемый посредством по меньшей мере одной электромагнитной волны известной из уровня техники частоты, в частности, из радиоволнового или оптического диапазонов частот. Измерительная станция 2, 26 и(или) по меньшей мере один или каждый объект 3, 27 системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды выполнены с возможностью передачи и(или) приёма соответствующего быстрого сигнала и могут содержать по меньшей мере один известный из уровня техники излучатель такого быстрого сигнала и(или) по меньшей мере один известный из уровня техники приёмник такого быстрого сигнала.
[0119] В других вариантах выполнения предложенных технических решений вместо ультразвукового импульса 11, 35 может быть использован известный из уровня техники медленный (звуковой) сигнал. Медленный сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной звуковой волны известной из уровня техники частоты, в частности, из акустического, ультразвукового или инфразвукового диапазонов частот. Измерительная станция 2, 26 и(или) по меньшей мере один или каждый объект 3, 27 системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды выполнены с возможностью передачи и(или) приёма соответствующего медленного сигнала и могут содержать по меньшей мере один известный из уровня техники излучатель такого медленного сигнала и(или) по меньшей мере один известный из уровня техники приёмник такого медленного сигнала. Медленный сигнал отличается от быстрого сигнала тем, что скорость его распространения в среде значительно (предпочтительно не менее двух порядков) меньше скорости распространения быстрого сигнала.
[0120] Использование в качестве быстрого сигнала, передаваемого посредством радиоволн, а в качестве медленного сигнала, передаваемого посредством ультразвуковых волн предпочтительнее, поскольку радиоволновые устройства и ультразвуковые устройства менее зависят от антенн, наличия снега и других внешних факторов, что положительно сказывается на надёжности системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды за счёт повышения точности измерения дальности, например, на железнодорожной дороге. Кроме того, поскольку радиоволны в атмосфере распространяются практически мгновенно, то можно сказать, что момент передачи радиоволны из измерительной станции 2, 26 равен моменту приёма радиоволны объектом 3, 27. Скорость распространения радиоволн значительно превышает скорость распространения ультразвуковых волн в атмосфере, временем распространения радиоимпульса 10 или синхронизирующего радиосигнала 34 от измерительной станции 2, 26 до n-ого объекта 3, 27 можно пренебречь (например, tr ≈ 0). Таким образом, dtur или dtuu - время прохождения зондирующего ультразвукового импульса 11, 35 от измерительной станции 2, 26 до объекта 3, 27.
[0121] В других вариантах выполнения предложенных способов 23, 43 на этапах 24A, 44A передают быстрый сигнал и медленный сигнал от измерительных станций 2, 26 в направлении опорных объектов 3, 27 и по меньшей мере одного наблюдаемого объекта 3.
[0122] В других вариантах выполнения предложенных способов 23, 43 на соответствующем этапе 24E, 44G могут передавать один запросный сигнал 12, 36 или множество запросных сигналов 12, 36, например, по меньшей мере по количеству объектов 3, 27. По меньшей мере один или каждый запросный сигнал 12, 36 может содержать идентификационный номер n опорного объекта 3, 27 и(или) идентификационный номер n по меньшей мере одного наблюдаемого объекта 3, 27 и представлять собой известный из уровня техники сигнал. Измерительная станция 2, 26 выполнена с возможностью запроса данных посредством по меньшей мере одного запросного сигнала 12, 36 от объектов 3, 27, например, через заданный интервал T времени. В зависимости от реализации измерительной станции 2, 26 такие данные могут включать в себя, например, по меньшей мере один интервал dtsf времени между моментом ts приёма медленного сигнала и моментом tf приёма быстрого сигнала, по меньшей мере один момент ts приёма медленного сигнала, идентификационный номер n объекта 3, 27 и проч.
[0123] В других вариантах выполнения предложенных способов 23, 43 этапы 24E, 44G, на которых передают запросные радиосигналы 12, 36 от измерительной станции 2, 26 в каждый объект 3, 27 и этапы 24F, 44H на которых принимают запросные радиосигналы 12, 36 от измерительной станции 2, 26 в каждом объекте 3, 27 могут отсутствовать. Этап, на котором запрашивают данные, в частности, идентификационный номер n, по меньшей мере один интервал dtsf времени между моментом ts приёма медленного и моментом tf приёма быстрого сигнала или по меньшей мере один момент ts приёма медленного сигнала от по меньшей мере одного или каждого объекта 3, 27 из измерительной станции 2, 26 может отсутствовать. Измерительная станция 2, 26 может быть не выполнена с возможностью запроса данных, в частности, идентификационного номера n, по меньшей мере одного интервала dtsf времени между моментом ts приёма медленного и моментом tf приёма быстрого сигнала или по меньшей мере одного момента ts приёма медленного сигнала от по меньшей мере одного или каждого объекта 3, 27. По меньшей мере один объект 3 системы 1 измерения дальности до перемещающихся наблюдаемых объектов 3 в условиях быстрого изменения параметров окружающей среды может быть выполнен с возможностью передачи сразу или через заданный интервал T времени по меньшей мере одного ответного радиосигнала 13 после вычисления интервала dtsf времени между моментом ts приёма медленного и моментом tf приёма быстрого сигнала и(или) после принятия запросного радиосигнала 12 от измерительной станции 2. По меньшей мере один объект 27 системы 25 измерения дальности до перемещающихся наблюдаемых объектов 27 в условиях быстрого изменения параметров окружающей среды может быть выполнен с возможностью передачи сразу или через заданный интервал T времени по меньшей мере одного ответного радиосигнала 37 после фиксирования момента ts приёма медленного сигнала и(или) после принятия запросного радиосигнала 36 от измерительной станции 26.
[0124] В других вариантах выполнения предложенных способов 23, 43 этапы 24J, 44M на которых передают данные, от измерительной станции 2, 26 в по меньшей мере одно внешнее устройство, могут отсутствовать. Такие данные могут включать в себя по меньшей мере один результат, дату и(или) время вычисления (измерения) расстояния Li от измерительной станции 2, 26 до i-ого наблюдаемого объекта 3, 27, идентификационный номер n объекта 3, 27, местоположение измерительной станции 2, 26. В других вариантах выполнения измерительная станция 3, 27 может не содержать блок 9, 33 связи и(или) содержать по меньшей мере один известный из уровня техники модуль глобальной навигационной спутниковой системы, например, GPS, Глонасс, при этом на по меньшей мере одном известном из уровня техники машиночитаемом носителе измерительной станции 2, 26 могут быть записаны различные данные, например, по меньшей мере один результат вычисления (измерения) расстояния Li от измерительной станции 2, 26 до i-ого наблюдаемого объекта 3, 27, дату и(или) время по меньшей мере одного вычисления (измерения) расстояния Li от измерительной станции 2, 26 до i-ого наблюдаемого объекта 3, 27, расстояние L0 от измерительной станции 2, 26 до опорного объекта 3, 27, идентификационный номер n каждого объекта 3, 27, местоположение измерительной станции 2, 26.
[0125] В описанных выше вариантах выполнения предложенных технических решений опорный объект 3, 27 является наиболее удалённым из всех объектов 3, 27, а все наблюдаемые объекты 3, 27 расположены в пространстве между измерительной станцией 2, 26 и опорным объектом 3, 27. Указанный вариант расположения опорного объекта 3, 27 предпочтителен, поскольку анализируется время в пределах всего возможного пути медленного сигнала: время распространения медленного сигнала измеряется в пределах максимальных возможных расстояний, где могут перемещаться наблюдаемые объекты, учитывается среда распространения во всём диапазоне перемещений.
[0126] По меньшей мере один или каждый объект 3, 27 системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды может быть выполнен с возможностью селекции принятых медленных сигналов: объект 3, 27 принимает (выделяет) первый медленный сигнал после быстрого сигнала, другие принятые медленные сигналы не принимаются во внимание. Иными словами, по меньшей мере один или каждый объект 3, 27 системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды может быть выполнен с возможностью селекции полезных (первых, принятых напрямую от измерительной станции 2, 26) медленных сигналов от мешающих (отражённых от посторонних объектов) медленных сигналов. Это позволит устранить влияние мешающих (отражённых) сигналов, отражённых от посторонних объектов, и влияние посторонних объектов в целом, что позволит повысить надёжность системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды за счёт повышения точности измерения дальности. Селекция принятых медленных сигналов может быть обеспечена в обрабатывающем блоке 18, 42 объекта 3, 27 или посредством дополнительного блока селекции сигналов в объекте 3, 27.
[0127] Момент передачи или момент приёма сигнала (быстрого или медленного) может представлять собой конкретное время (часы, минуты, секунды, миллисекунды и прочие единицы измерения времени), начало отсчёта интервала времени или количество единиц измерения времени, прошедших от начала отсчёта, (конец интервала времени). Фиксация может представлять собой запись конкретного времени и(или) количество единиц времени, прошедших от начала отсчёта, и(или) запуск или остановку отсчёта.
[0128] Предложенные технические решения по сравнению с ближайшим аналогом обладают следующими основными преимуществами, которые обеспечивают повышение надёжности систем 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды.
[0129] Повышенная точность измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды достигнута за счёт исключения влияния на скорость распространения медленных сигналов, излученных в различные моменты времени, быстро меняющихся параметров окружающей среды (мешающих факторов), поскольку расстояние до каждого из всех наблюдаемых объектов 3, 27 определяется по задержке приёма излучаемого измерительной станцией 2, 26 медленного сигнала, единого для всех объектов 3, 27 и, следовательно, при одинаковых условиях распространения. Дальность до наблюдаемых объектов 3, 27 определяется (вычисляется) по времени распространения одного и того же медленного сигнала, например, ультразвукового импульса, от измерительной станции 2, 26 до каждого из наблюдаемых объектов 3, 27 в одно и то же время, т.е. при одном и том же состоянии среды распространения (атмосферы) медленного сигнала, например, ультразвукового импульса. В частности, интервал dtsf времени между моментом ts приёма медленного сигнала и моментом tf приёма быстрого сигнала вычисляется (измеряется, определяется) в каждом объекте 3, что обеспечивает параллельную работу объектов 3. Кроме того, повышение надёжности измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды обеспечено за счёт повышения точности измерения дальности достигается установкой опорного объекта 3A, 27A на известном расстоянии (в сравнении с которым и вычисляются расстояния до соответствующего наблюдаемого объекта 3, 27). Принципиальное отличие предложенных технических решений от наиболее близкого аналога заключается в том, что они работают в асинхронном режиме, в частности, это выражается в том, что одновременно (параллельно) опрашивают множество объектов 3, 27, принимают ответные сигналы от объектов 3, 27 в измерительных станциях 2, 26 по мере их поступления (объекты 3, 27 работают параллельно). В таком режиме операции в объектах 3, 27 происходят одновременно при одинаковых условиях окружающей среды, следовательно, повышается точность измерения, т.к. и измерение расстояний от опорного объекта 3A, 27A до соответствующих наблюдаемых объектов 3, 27 происходит в тоже время. Кроме того, снижается задержка между измерениями (а соответственно уменьшается время работы всей системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды), что повышает надёжность измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды. Наиболее близкой аналог работает в синхронном режиме: опрашивают каждый идентификатор последовательно, принимают от этого идентификатора ответный сигнал, а затем опрашивают следующий идентификатор. Наиболее близкий аналог используется только для создания систем локального позиционирования объектов, в частности, для определения местонахождения оборудования и людей в помещениях (где стабильная температура) и на прилегающих площадках. Дополнительно, повышение надёжности измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды за счёт повышения точности измерения дальности обеспечивается возможностью селекции принятых сигналов в по меньшей мере одном объекте 3, 27.
[0130] Сокращение числа используемых излучателей медленных сигналов до одного, что приводит к повышению надёжности измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды за счёт упрощения системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды, существенной экономии финансовых затрат на создание и эксплуатацию подобных систем 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды.
[0131] Объекты 3, 27 не обладают излучателями медленных сигналов, что существенно снижает их энергопотребление, увеличивает интервалы времени их работы до замены элементов питания и систем 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды в целом, что дополнительно уменьшает трудозатраты по обслуживанию устройств на опорах контактной сети, связанные с работой на высоте, и выделение специального времени для обслуживания, в течение которого отсутствует движение пассажирских и грузовых поездов. Энергопотребление (энергетические затраты) излучателя медленных сигналов больше энергопотребления приёмника медленных сигналов. Кроме того, сокращается время измерения дальности до объектов 3, 27 систем 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды, поскольку используют для измерения один медленный сигнал. Уменьшение электропотребления приводит к сокращению затрат на обслуживание, увеличению времени работы без замены элементов питания объектов 3, 27 и измерительной станции 2, 26, увеличению интервала обслуживания, увеличению долговечности объектов 3, 27 и измерительной станции 2, 26 и увеличению надёжности систем 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды в целом. Также дополнительно уменьшаются трудозатраты по обслуживанию устройств на опорах контактной сети, связанных с работой на высоте, и выделения специальных интервалов времени для обслуживания, в течение которого отсутствует движение пассажирских и грузовых поездов.
[0132] Сокращается время измерения расстояний до наблюдаемых объектов 3, 27, поскольку медленный сигнал излучается один раз, а затем быстрыми сигналами передаются короткие сообщения, в отличие от наиболее близкого аналога, где каждый идентификатор последовательно запускают радиоимпульсом, излучаемым устройством контроля, и принимают ответный ультразвуковой импульс в устройстве контроля. Это дополнительно снижает энергопотребление и увеличивает время работы до замены элементов питания системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды.
[0133] Излучателями медленных сигналов оборудованы только измерительные станции 2, 26, а не объекты 3, 27 систем 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды, что существенно упрощает производство подобных систем 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды, повышает их надёжность и снижает стоимость оборудования всех систем 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды за счёт сокращения числа используемых излучателей медленных сигналов.
[0134] Обеспечена привязка принимаемого измерительной станцией 2, 26 ответного сигнала к конкретному наблюдаемому объекту 3, 27 из числа полезных объектов, что повышает надёжность измерения дальностей до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды в целом, а также обеспечивает параллельную работу объектов 3, 27 системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды и надёжном различении объектов 3, 27 системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды от посторонних объектов. Это достигнуто за счёт отказа от анализа отражённых сигналов, применения метода измерения времени прямого распространения медленных сигналов, наличия идентификационного номера n у каждого объекта 3, 27 системы 1, 25 измерения дальности до перемещающихся наблюдаемых объектов 3, 27 в условиях быстрого изменения параметров окружающей среды, измерения (фиксации, вычисления) момента ts приёма медленного сигнала в соответствующей n-ом объекте 3, 27.
Позиции на чертежах
[0135] На Фиг. 1-10 ссылочными позициями обозначены:
1 - система измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения
2 - измерительная станция системы 1 измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения
3A-3C - объекты системы 1 измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения
4 - радиоволновый излучатель измерительной станции 2
5 - ультразвуковой излучатель измерительной станции 2
6 - радиоволновый приёмник измерительной станции 2
7 - измеритель времени измерительной станции 2
8 - обрабатывающий блок измерительной станции 2
9 - блок связи измерительной станции 2
10 - радиоимпульс
11 - зондирующий ультразвуковой импульс
12 - запросный радиосигнал
13 - ответный радиосигнал
14 - радиоволновый приёмник объекта 3
15 - ультразвуковой приёмник объекта 3
16 - радиоволновый излучатель объекта 3
17 - измеритель времени объекта 3
18 - обрабатывающий блок объекта 3
19 - несущий трос
20 - контактный провод
21A, 21B - грузы грузокомпенсаторов
22 - анкерная опора
23 - способ работы системы 1 измерения дальности до наблюдаемых объектов 3 в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения
24A-24J - этапы способа работы системы 1 измерения дальности до наблюдаемых объектов 3 в условиях быстрого изменения параметров окружающей среды по первому примеру выполнения
25 - система измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения
26 - измерительная станция системы 25 измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения
27A-27C - объекты системы 25 измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения
28 - радиоволновый излучатель измерительной станции 26
29 - ультразвуковой излучатель измерительной станции 26
30 - радиоволновый приёмник измерительной станции 26
31 - измеритель времени измерительной станции 26
32 - обрабатывающий блок измерительной станции 26
33 - блок связи измерительной станции 26
34 - синхронизирующий радиосигнал
35 - зондирующий ультразвуковой импульс
36 - запросный радиосигнал
37 - ответный радиосигнал
38 - радиоволновый приёмник объекта 27
39 - ультразвуковой приёмник объекта 27
40 - радиоволновый излучатель объекта 27
41 - измеритель времени объекта 27
42 - обрабатывающий блок объекта 27
43 - способ работы системы 25 измерения дальности до наблюдаемых объектов 27 в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения
44A-44M - этапы способа работы системы 25 измерения дальности до наблюдаемых объектов 27 в условиях быстрого изменения параметров окружающей среды по второму примеру выполнения
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЕРИМЕНТАЛЬНОЙ ПРОВЕРКИ ИНФОРМАЦИОННЫХ И ИДЕНТИФИКАЦИОННЫХ ВОЗМОЖНОСТЕЙ ДОПЛЕРОВСКИХ ПОРТРЕТОВ ВОЗДУШНЫХ ОБЪЕКТОВ | 2014 |
|
RU2571957C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОГО ОБЪЕКТА В РЕЖИМЕ ХАОТИЧНОЙ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ ПРИ ОГРАНИЧЕННОМ КОЛИЧЕСТВЕ ИСПОЛЬЗУЕМЫХ ЧАСТОТ | 2010 |
|
RU2427003C2 |
| СПОСОБ КОМПЛЕКСНОГО ТЕЛЕМОНИТОРИНГА ПОДВИЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2216047C2 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Способ определения размеров зерна в листовом металлопрокате | 2022 |
|
RU2782966C1 |
| Способ селекции имитаторов вторичного излучения воздушных объектов | 2018 |
|
RU2694276C1 |
| Способ искажения радиолокационного изображения в космической радиолокационной станции с синтезированной апертурой антенны | 2016 |
|
RU2622904C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПЕРЕСТРОЙКОЙ ЧАСТОТЫ, ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ ПО СОВОКУПНОСТИ ПРИЗНАКОВ | 2009 |
|
RU2412451C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТЕРПЯЩИХ БЕДСТВИЕ | 2009 |
|
RU2402787C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |
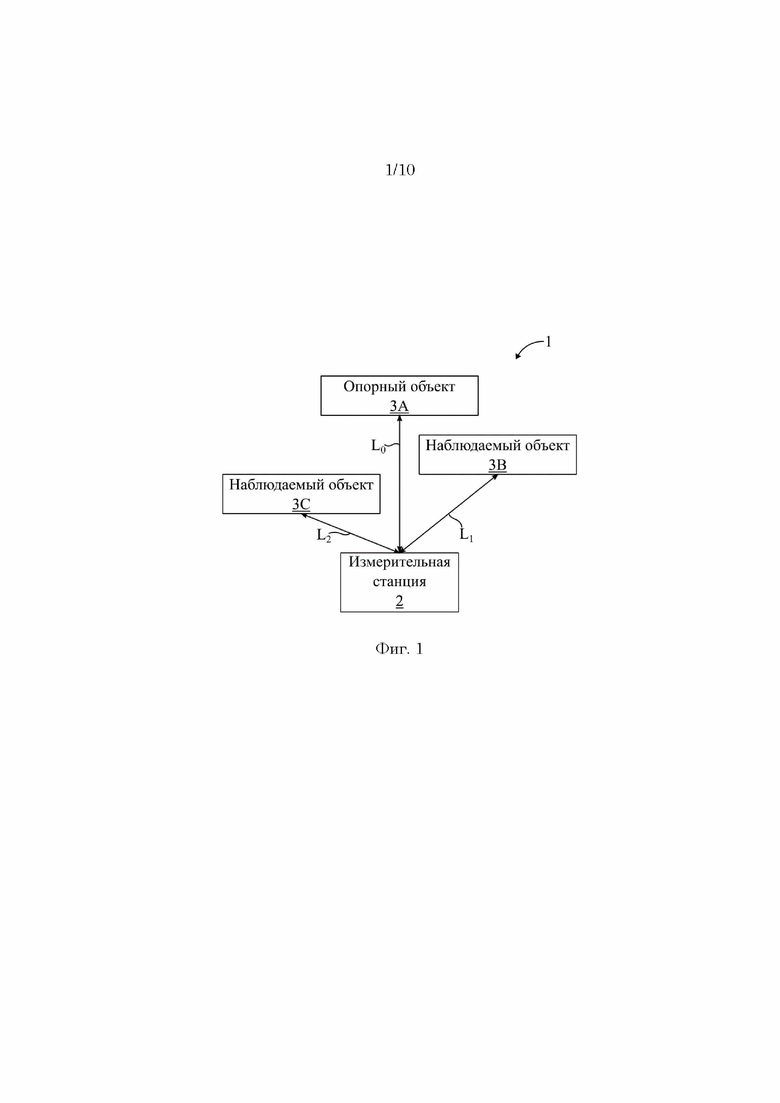
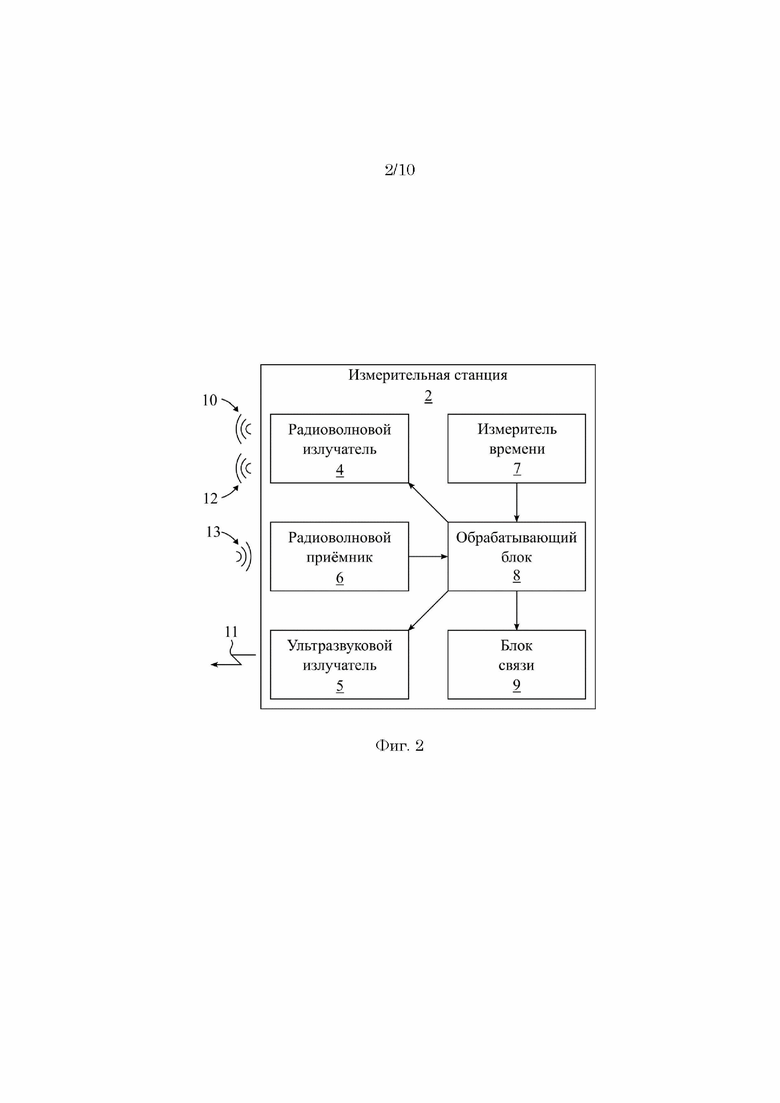
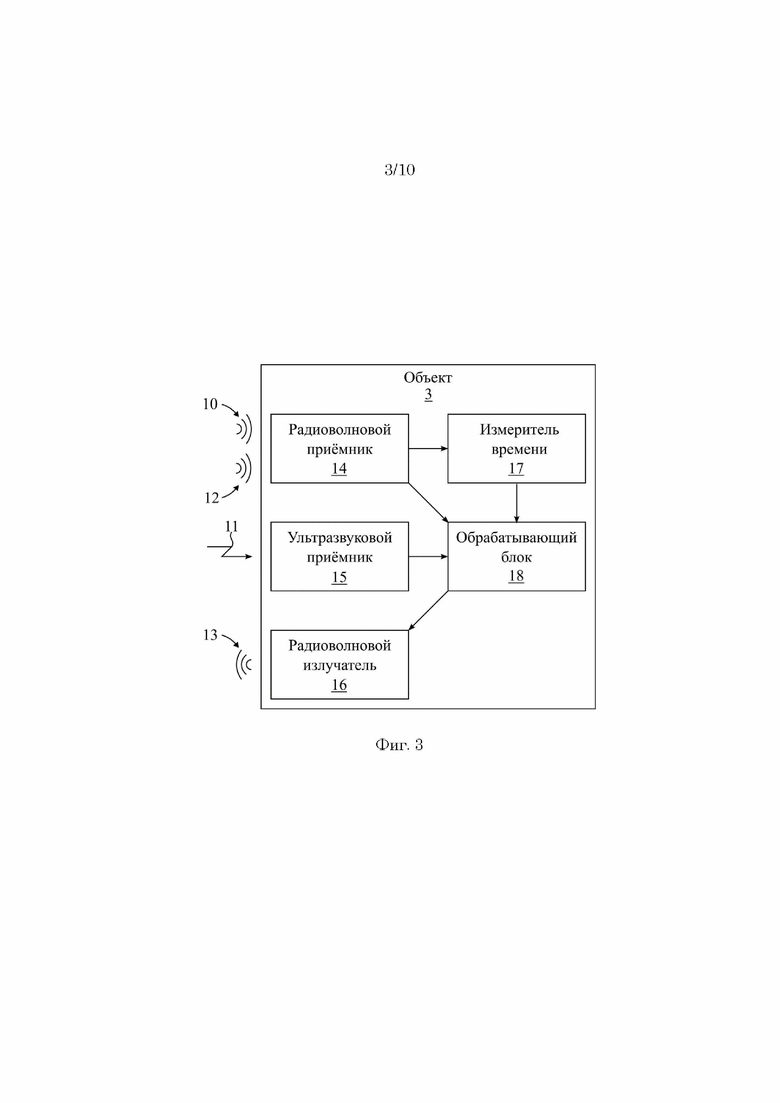
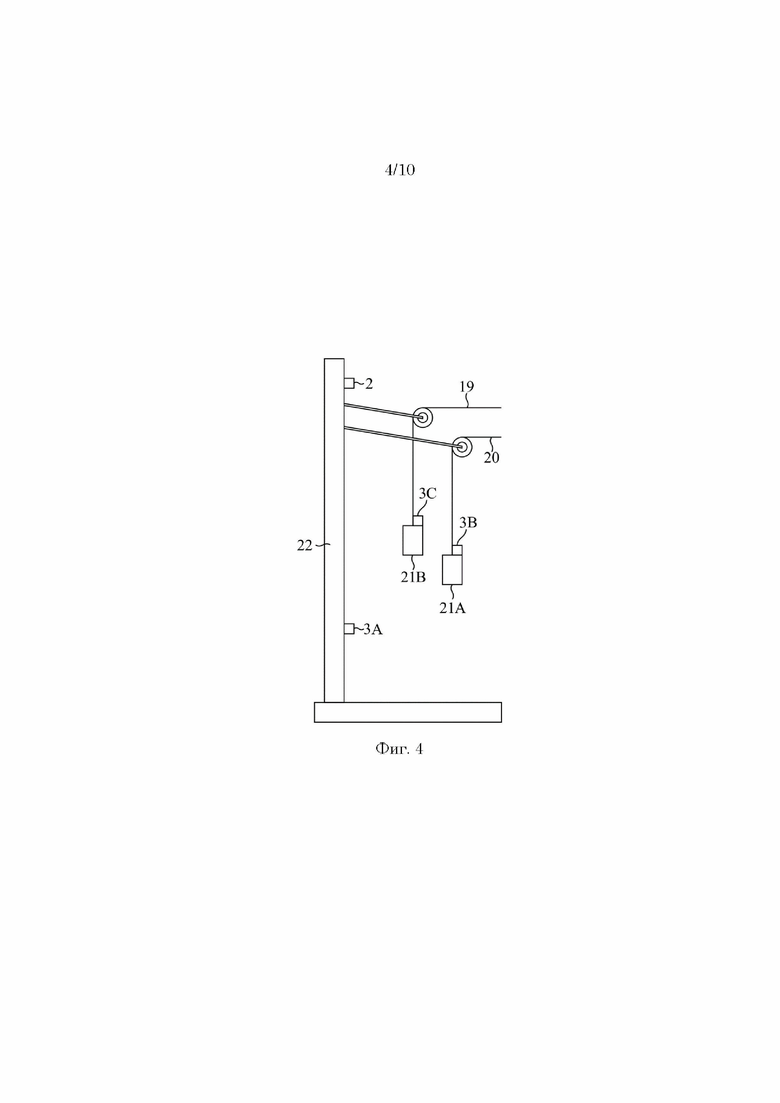
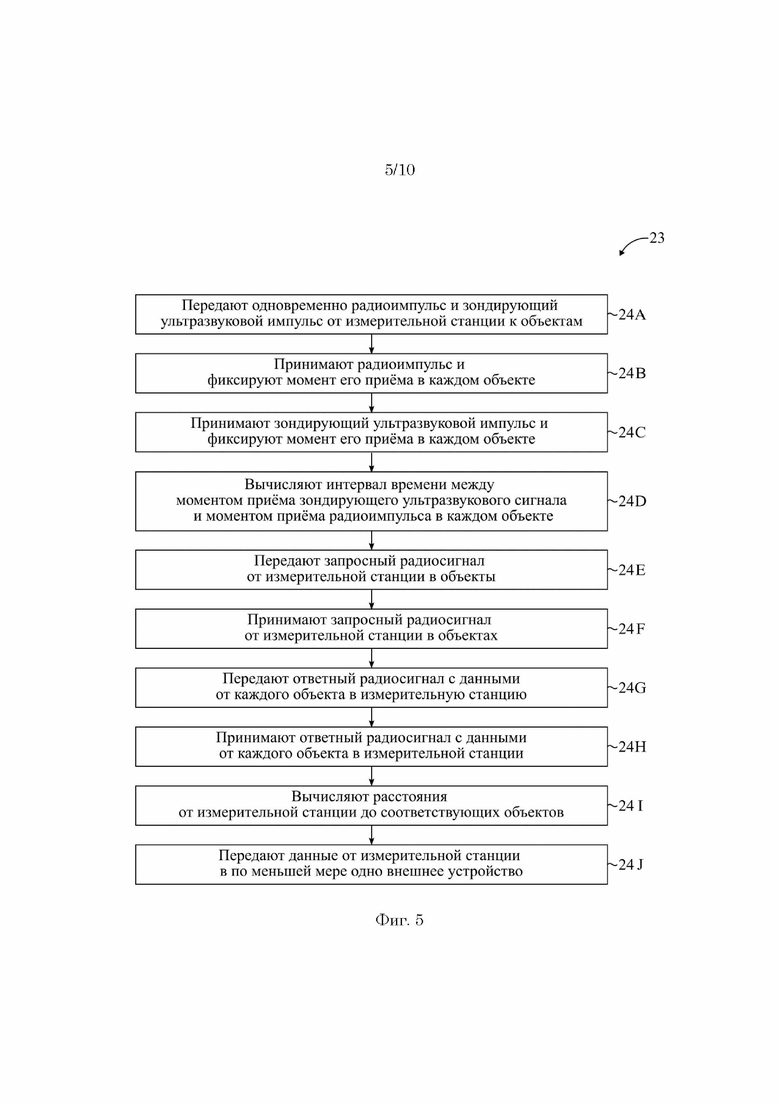
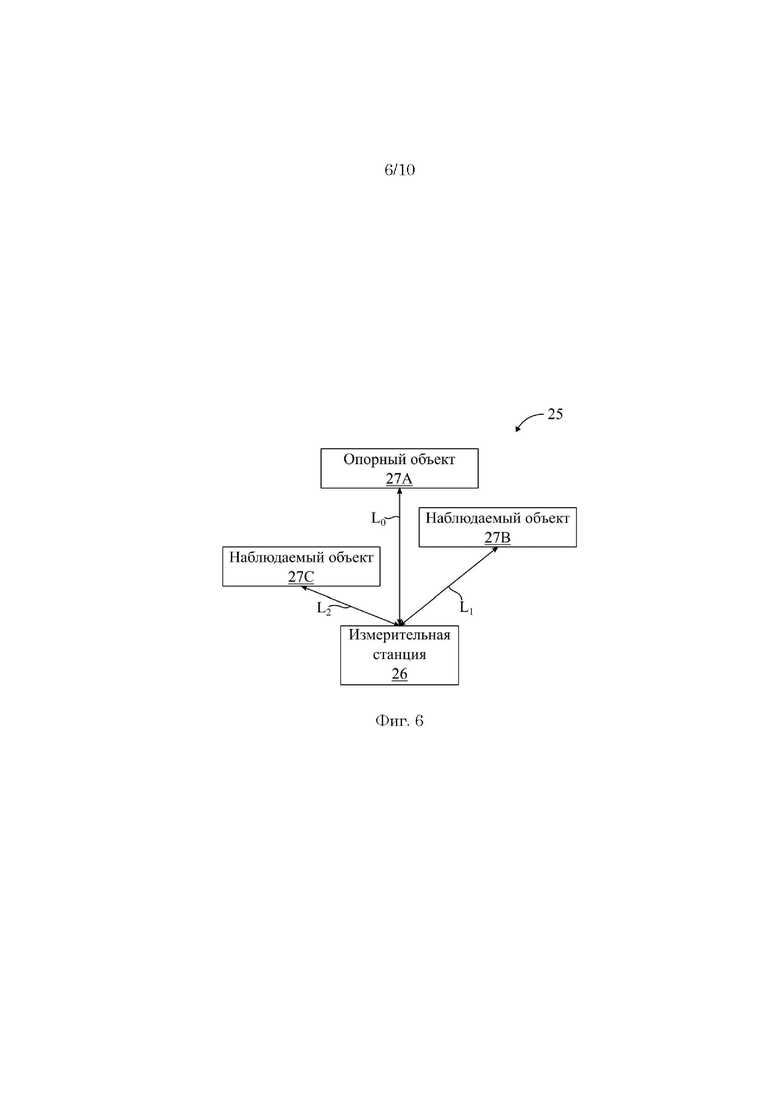
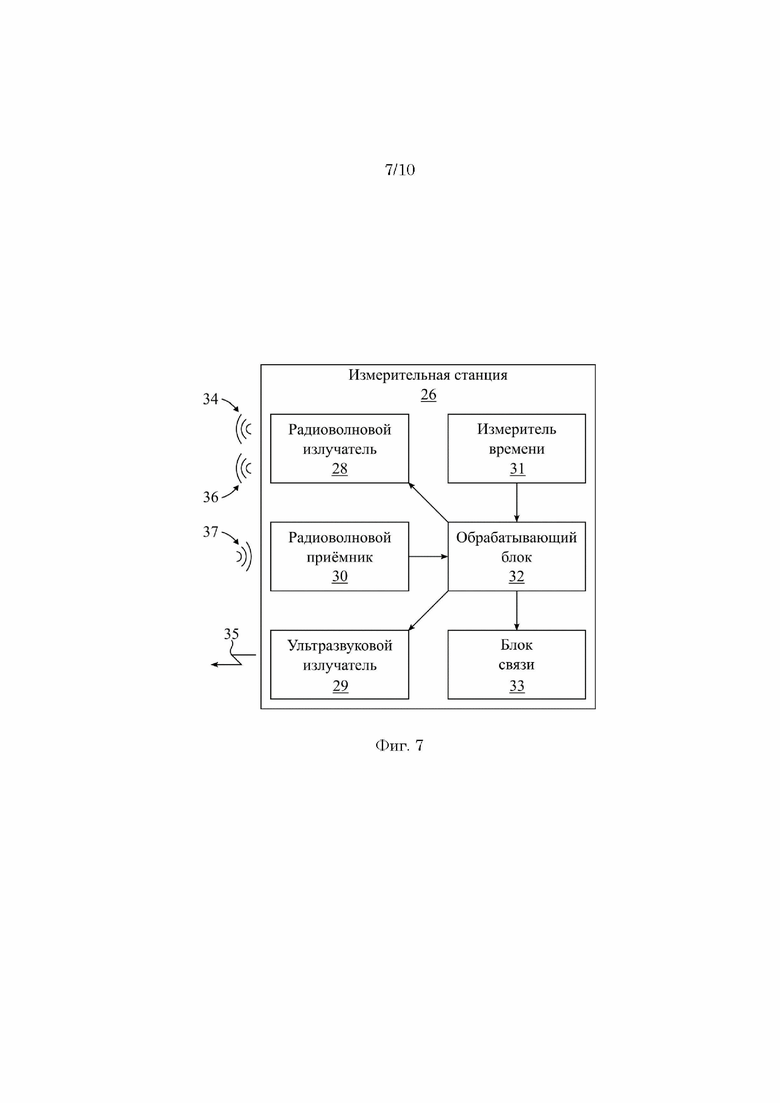
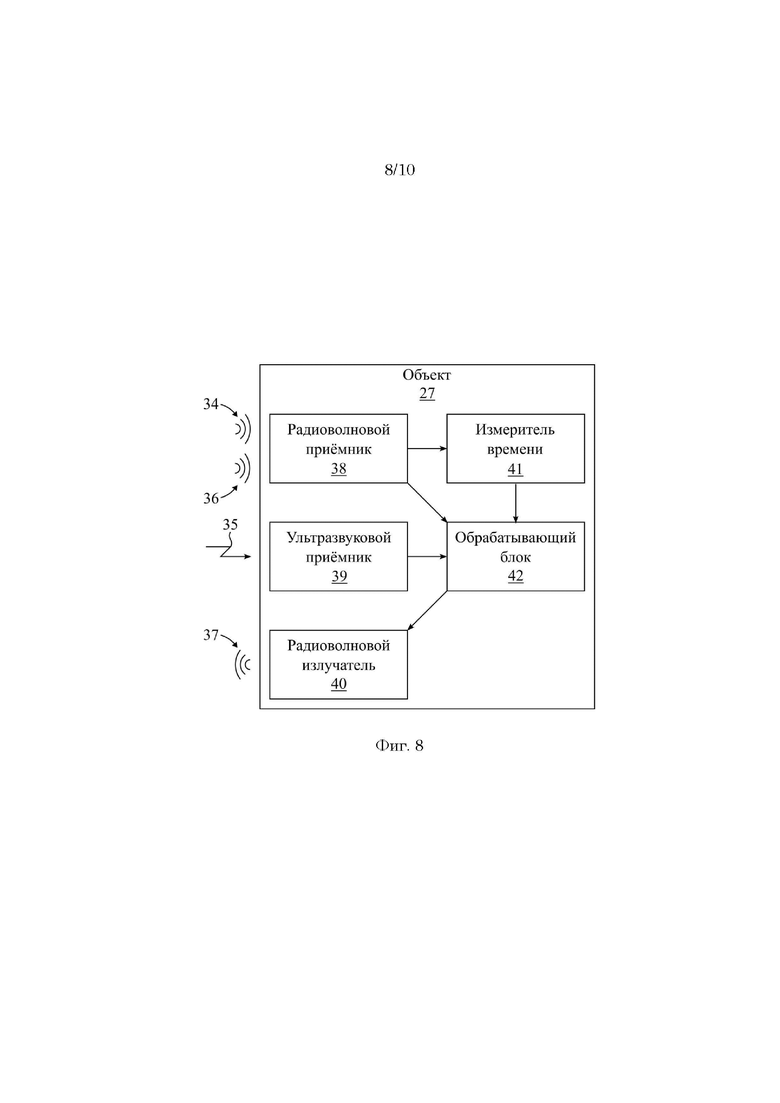
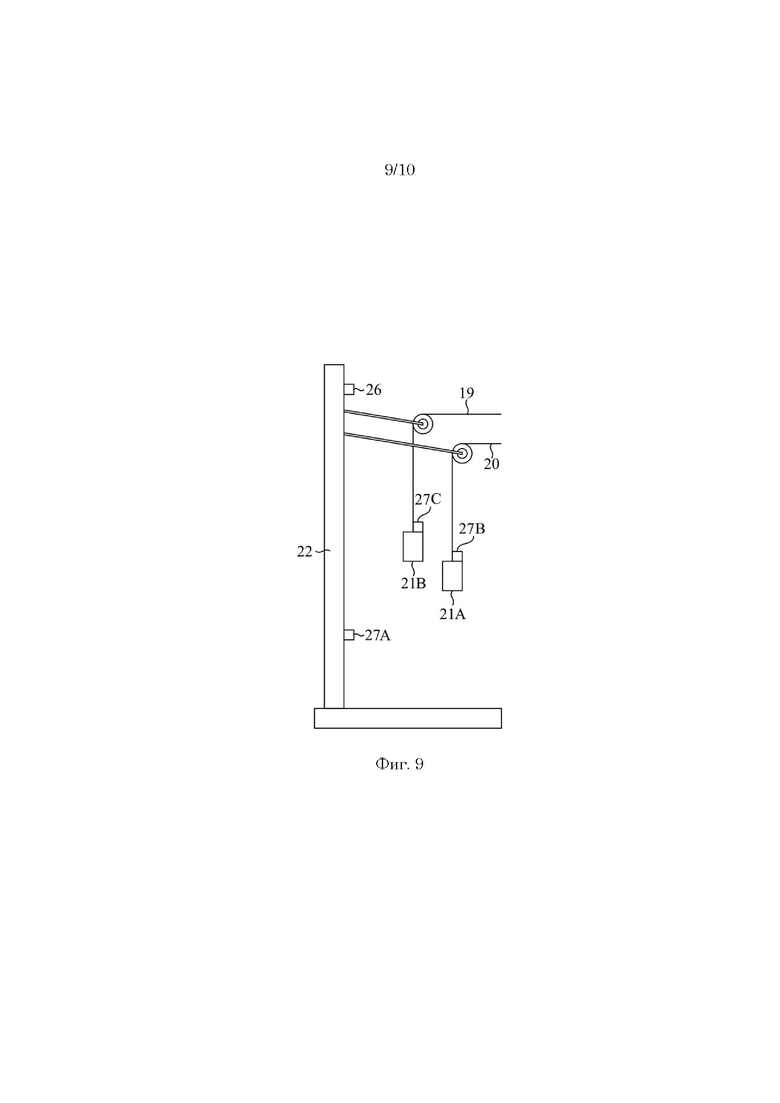
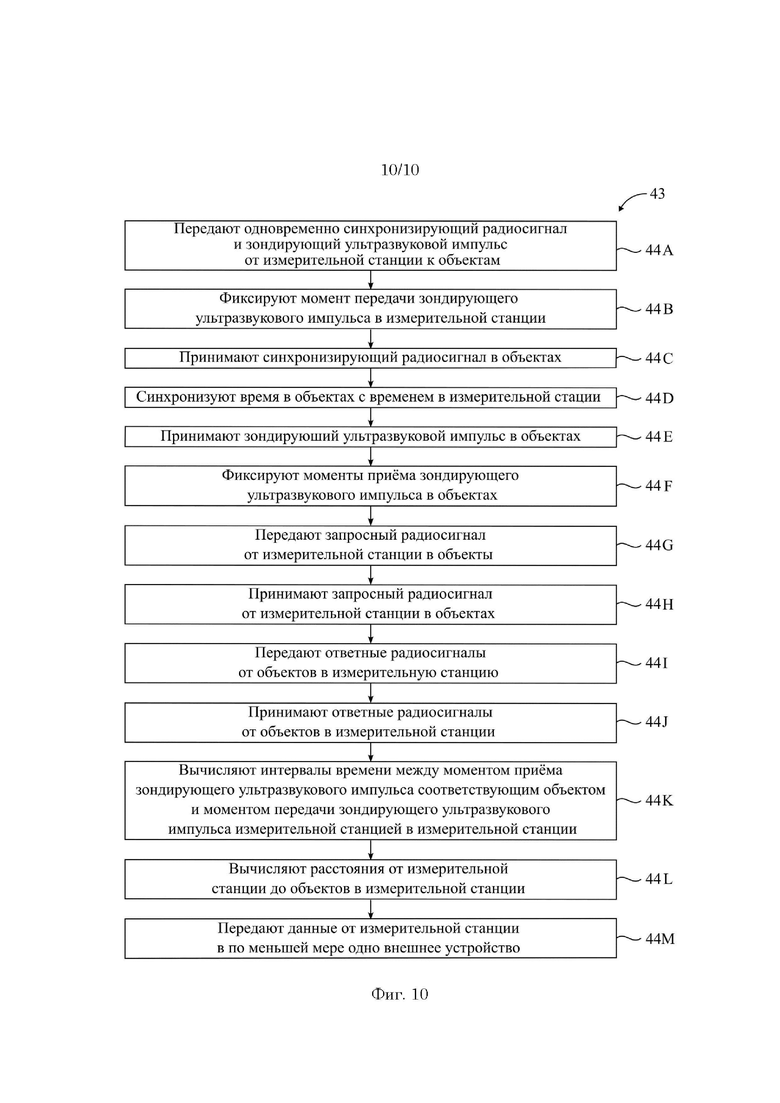
Группа изобретений относится к способам измерения дальности до наблюдаемых близко расположенных и перемещающихся объектов в условиях быстрого изменения параметров окружающей среды и к системам для реализации упомянутых способов. Технический результат заключается в повышении надёжности системы измерения дальности до перемещающихся наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды. В заявленном способе расстояние до наблюдаемого объекта определяется по задержке приёма излучаемого измерительной станцией медленного сигнала, единого для опорного объекта и наблюдаемого объекта и передаваемого при одинаковых условиях распространения. Расстояние от измерительной станции до наблюдаемого объекта вычисляют на основе известности расстояния от измерительной станции до опорного объекта и задержек приёма опорным объектом и наблюдаемым объектом излучаемого измерительной станцией медленного сигнала. 4 н. и 10 з.п. ф-лы, 10 ил.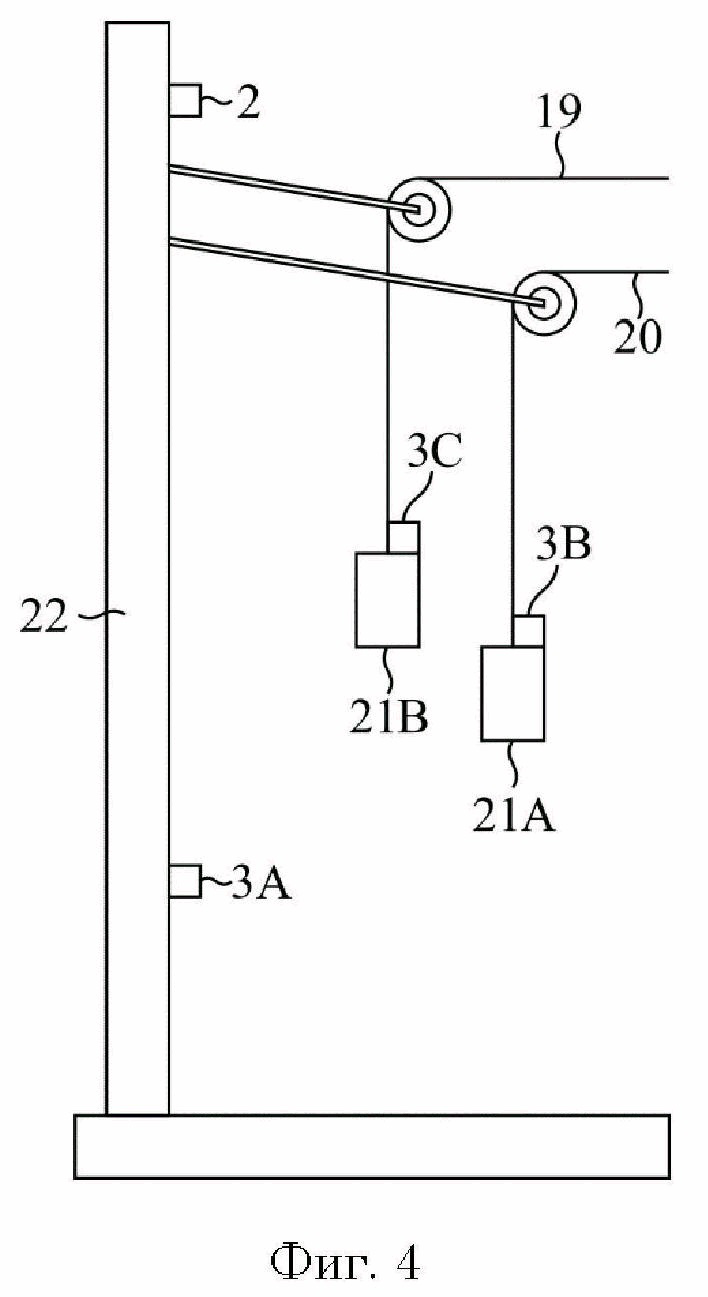
1. Способ измерения дальности до наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды, содержащий этапы, на которых:
- передают одновременно быстрый сигнал и медленный сигнал от измерительной станции в опорный объект и в по меньшей мере один наблюдаемый объект, при этом быстрый сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной электромагнитной волны, медленный сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной звуковой волны, опорный объект расположен на заданном расстоянии от измерительной станции, а по меньшей мере один наблюдаемый объект расположен между измерительной станцией и опорным объектом и выполнен с возможностью перемещения,
- принимают быстрый сигнал от измерительной станции в опорном объекте и в по меньшей мере одном наблюдаемом объекте,
- фиксируют момент приёма быстрого сигнала в опорном объекте и момент приёма быстрого сигнала в по меньшей мере одном наблюдаемом объекте,
- принимают медленный сигнал от измерительной станции в опорном объекте и в по меньшей мере одном наблюдаемом объекте,
- фиксируют момент приёма медленного сигнала в опорном объекте и момент приёма медленного сигнала в по меньшей мере одном наблюдаемом объекте,
- вычисляют интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала в опорном объекте и интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала в по меньшей мере одном наблюдаемом объекте,
- передают интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от опорного объекта и интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта в измерительную станцию,
- принимают интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от опорного объекта и интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта в измерительной станции,
- вычисляют расстояние от измерительной станции до по меньшей мере одного наблюдаемого объекта в измерительной станции на основе известности расстояния от измерительной станции до опорного объекта, интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала, принятого от соответствующего по меньшей мере одного наблюдаемого объекта, и интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала, принятого от опорного объекта.
2. Способ по п. 1, отличающийся тем, что перед этапом, на котором передают интервалы времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационные номера от опорного объекта и по меньшей мере одного наблюдаемого объекта, он дополнительно содержит этап, на котором:
- запрашивают интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от опорного объекта и интервал времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта из измерительной станции.
3. Система для измерения дальности до перемещающихся наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды, содержащая:
- измерительную станцию, выполненную с возможностью передачи одновременно быстрого сигнала и медленного сигнала в опорный объект и в по меньшей мере один наблюдаемый объект, хранения расстояния от измерительной станции до опорного объекта, принятия и обработки интервалов времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационных номеров от опорного объекта и от по меньшей мере одного наблюдаемого объекта и вычисления расстояния от измерительной станции до по меньшей мере одного наблюдаемого объекта на основе известности расстояния от измерительной станции до опорного объекта, интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала, принятого от соответствующего по меньшей мере одного наблюдаемого объекта, и интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала, принятого от опорного объекта, при этом быстрый сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной электромагнитной волны, медленный сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной звуковой волны,
- опорный объект, предназначенный для размещения на стационарной опоре на заданном расстоянии от измерительной станции и выполненный с возможностью принятия быстрого сигнала, фиксации момента приёма быстрого сигнала, принятия медленного сигнала, фиксации момента приёма медленного сигнала, хранения своего идентификационного номера, вычисления интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и передачи интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и своего идентификационного номера в измерительную станцию,
- по меньшей мере один наблюдаемый объект, выполненный с возможностью принятия быстрого сигнала, фиксации момента приёма быстрого сигнала, принятия медленного сигнала, фиксации момента приёма медленного сигнала, хранения своего идентификационного номера, вычисления интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и передачи интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и своего идентификационного номера в измерительную станцию.
4. Система по п. 3, отличающаяся тем, что измерительная станция дополнительно выполнена с возможностью запроса интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационного номера от опорного объекта и с возможностью запроса интервала времени между моментом приёма медленного сигнала и моментом приёма быстрого сигнала и идентификационного номера от по меньшей мере одного наблюдаемого объекта.
5. Система по п. 3, отличающаяся тем, что измерительная станция дополнительно выполнена с возможностью передачи данных в по меньшей мере одно внешнее устройство.
6. Система по п. 5, отличающаяся тем, что данные содержат по меньшей мере один результат вычисления расстояния от измерительной станции до по меньшей мере одного наблюдаемого объекта и его идентификационный номер.
7. Система по п. 3, отличающаяся тем, что опорный объект и(или) по меньшей мере один наблюдаемый объект выполнены с возможностью селекции полезных медленных сигналов от мешающих медленных сигналов.
8. Способ измерения дальности до перемещающихся наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды, содержащий этапы, на которых:
- передают одновременно синхронизирующий быстрый сигнал и медленный сигнал от измерительной станции в опорный объект и в по меньшей мере один наблюдаемый объект, при этом синхронизирующий быстрый сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной электромагнитной волны, и содержит данные о времени в измерительной станции, медленный сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной звуковой волны, опорный объект расположен на заданном расстоянии от измерительной станции, а по меньшей мере один наблюдаемый объект расположен между измерительной станцией и опорным объектом и выполнен с возможностью перемещения,
- фиксируют момент передачи медленного сигнала в измерительной станции,
- принимают синхронизирующий быстрый сигнал в опорном объекте и в по меньшей мере одном наблюдаемом объекте,
- синхронизируют время в опорном объекте и в по меньшей мере одном наблюдаемом объекте с временем в измерительной станции,
- принимают медленный сигнал в опорном объекте и в по меньшей мере одном наблюдаемом объекте,
- фиксируют момент приёма медленного сигнала в опорном объекте и момент приёма медленного сигнала в по меньшей мере одном наблюдаемом объекте,
- передают момент приёма медленного сигнала и идентификационный номер от опорного объекта и момент приёма медленного сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта в измерительную станцию,
- принимают момент приёма медленного сигнала и идентификационный номер от опорного объекта и момент приёма медленного сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта в измерительной станции,
- вычисляют интервал времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала для опорного объекта и интервал времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала для по меньшей мере одного наблюдаемого объекта в измерительной станции,
- вычисляют расстояние от измерительной станции до по меньшей мере одного наблюдаемого объекта в измерительной станции на основе известности расстояния от измерительной станции до опорного объекта, интервала времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала, вычисленного для соответствующего по меньшей мере одного наблюдаемого объекта, и интервала времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала, вычисленного для опорного объекта.
9. Способ по п. 8, отличающийся тем, что перед этапом, на котором передают моменты приёма медленного сигнала и идентификационные номера от опорного объекта и от по меньшей мере одного наблюдаемого объекта, он дополнительно содержит этап, на котором:
- запрашивают момент приёма медленного сигнала и идентификационный номер от опорного объекта и момент приёма медленного сигнала и идентификационный номер от по меньшей мере одного наблюдаемого объекта из измерительной станции.
10. Система для измерения дальности до перемещающихся наблюдаемых объектов в условиях быстрого изменения параметров окружающей среды, содержащая:
- измерительную станцию, выполненную с возможностью передачи одновременно синхронизирующего быстрого сигнала и медленного сигнала в опорный объект и по меньшей мере один наблюдаемый объект, фиксации момента передачи медленного сигнала, принятия и обработки моментов принятия медленного сигнала и идентификационных номеров от опорного объекта и от по меньшей мере одного наблюдаемого объекта, хранения расстояния от измерительной станции до опорного объекта, вычисления интервалов времени между моментом принятия медленного сигнала и моментом передачи медленного сигнала для опорного объекта и для по меньшей мере одного наблюдаемого объекта и по меньшей мере одного вычисления расстояния от измерительной станции до по меньшей мере одного наблюдаемого объекта на основе известности расстояния от измерительной станции до опорного объекта, интервала времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала, вычисленного для соответствующего по меньшей мере одного наблюдаемого объекта, и интервала времени между моментом приёма медленного сигнала и моментом передачи медленного сигнала, вычисленного для опорного объекта, при этом синхронизирующий быстрый сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной электромагнитной волны, и содержит данные о времени в измерительной станции, медленный сигнал представляет собой сигнал, передаваемый посредством по меньшей мере одной звуковой волны,
- опорный объект, предназначенный для размещения на стационарной опоре на заданном расстоянии от измерительной станции и выполненный с возможностью принятия синхронизирующего быстрого сигнала, синхронизации своего времени с временем измерительной станции, принятия медленного сигнала, фиксации момента приёма медленного сигнала, хранения своего идентификационного номера, передачи момента принятия медленного сигнала и своего идентификационного номера в измерительную станцию,
- наблюдаемый объект, выполненный с возможностью принятия синхронизирующего быстрого сигнала, синхронизации своего времени с временем измерительной станции, принятия медленного сигнала, фиксации момента приёма медленного сигнала, хранения своего идентификационного номера, передачи момента принятия медленного сигнала и своего идентификационного номера в измерительную станцию.
11. Система по п. 10, отличающаяся тем, что измерительная станция дополнительно выполнена с возможностью запроса момента приёма медленного сигнала и идентификационного номера от опорного объекта и с возможностью запроса момента приёма медленного сигнала и идентификационного номера от по меньшей мере одного наблюдаемого объекта.
12. Система по п. 10, отличающаяся тем, что измерительная станция дополнительно выполнена с возможностью передачи данных в по меньшей мере одно внешнее устройство.
13. Система по п. 12, отличающаяся тем, что данные содержат по меньшей мере один результат вычисления расстояния от измерительной станции до по меньшей мере одного наблюдаемого объекта.
14. Система по п. 10, отличающаяся тем, что опорный объект и(или) по меньшей мере один наблюдаемый объект выполнены с возможностью селекции полезных медленных сигналов от мешающих медленных сигналов.
| СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ ОБЪЕКТОВ | 2016 |
|
RU2609582C1 |
| CN 106405492 A, 15.02.2017 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО РОБОТА | 2004 |
|
RU2265803C1 |
| RU 2011146813 A, 27.05.2013 | |||
| US 2009233551 A1, 17.09.2009 | |||
| WO 9928763 A1, 10.06.1999 | |||
| Устройство для продольной разрезки оттисков, например, на двух оборотных плоскопечатных машинах | 1956 |
|
SU108184A1 |
