Изобретение относится к робототехнике, в частности к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Работа включает следующие оперативно-тактические действия: разведка территории, наблюдение за потенциально опасными объектами, обезвреживание этих объектов путем эвакуации или дезактивации, а также решение других подобных задач.
Из предшествующего уровня развития техники известен мобильный робототехнический комплекс по патенту RU 2364500, МПК В251 5/00 от 31.10.2007 г., который включает в свой состав мобильный робот, пост дистанционного управления, комплект дополнительного оборудования, причем мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях манипулятора и на корпусе транспортного средства, в состав каждого видеоблока входитвидеокамера, заключенная в защитный кожух с источниками подсветки, по меньшей мере, один из видеоблоков, выполняющий обзорные функции, располагается на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, на транспортном средстве также укреплены приводы многостепенного манипулятора и сам манипулятор с захватным устройством, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации; комплекс снабжен выносной системой видеонаблюдения, а мобильный робот комплекса снабжен устройством доставки системы видеонаблюдения в заданную точку местности и ее оперативного развертывания, в комплект же дополнительного оборудования введена раздвижная телескопическая штанга-удлинитель, снабженная на одном конце узлом вертикального крепления ее в кормовой части транспортного средства мобильного робота и на другом конце снабженная узлом крепления привода наведения видеоблока, выполняющего обзорные функции. Недостатком устройства является отсутствие возможности получать непрерывную визуальную информацию о месте работы с любого ракурса.
Кроме того, использование выносной системы видеонаблюдения, устанавливаемой самим роботом, значительно увеличивает время подготовки робота к работе. Дополнительная камера позволяет наблюдать объект с еще одного ракурса, но не позволяет оперативно получать непрерывную визуальную информацию о месте работы с разных ракурсов, что снижает эффективность использования комплекса.
Наиболее близким к полезной модели по совокупности существенных; признаков является мобильный робототехнический комплекс по патенту RU№ 2574547, МПК В251 5/00 от 10.02. 2016 - прототип полезной модели, включающий в свой состав мобильный робот, пост дистанционного управления, беспилотный летательный аппарат винтового типа, содержащий систему видеонаблюдения с собственной системой управления и дистанционной связи с постом дистанционного управления, комплект дополнительного оборудования, содержащий транспортнуюприцепную тележку, автомобильный аккумулятор, комплект губок схвата различной конфигурации, кронштейны - держатели разрушителей взрывоопасных предметов, причем мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства, причем каждый видеоблок содержитвидеокамеру, заключенную в защитный кожух с источниками подсветки, и, по меньшей мере, один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом на транспортном средстве укреплены манипулятор с захватным устройством и его приводы, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации.
При несомненных достоинствах комплекса он не позволяет получать точную непрерывную визуальную информацию о позиционировании и месте работы мобильного робота с разных ракурсов из-за недостаточно четкого изображения места работы на посту дистанционного управления, например, из-за плохих погодных условий (туман, сильная облачность), что в конечном итоге приводит к снижению эффективности использования комплекса.
Кроме того, низкая точность непрерывной визуальной информации о месте работы может привести к созданию аварийных ситуаций, связанных, например, с поломками мобильного робота, столкновениями беспилотного летательного аппарата с мобильным роботом при сильном ветре, что снижает надежность работы комплекса.
Задача, решаемая предлагаемым изобретением, заключается в расширении функциональных возможностей, повышении эффективности использования и надежности работы мобильного робототехнического комплекса за счет достижения следующих полезных технических результатов:
1. Обеспечивается возможность получать точную непрерывную визуальную информацию о месте работы с необходимых ракурсов в любых условиях обстановки и оперативно менять освещенность места работы.
2. Повышается точность дистанционных манипуляций с предметами.
3. Увеличивается срок службы мобильного робототехнического комплекса.
4. Снижается психоэмоциональное напряжение операторов при работе с взрывоопасными предметами.
Сущность изобретения, обеспечивающая достижение совокупности указанных технических результатов, заключается в следующем.
Мобильный робототехнический комплекс, содержащий мобильный робот, пост дистанционного управления, беспилотный летательный аппарат винтового типа, содержащий систему видеонаблюдения с собственной системой управления и дистанционной связи с постом дистанционного управления, комплект дополнительного оборудования, содержащий транспортную прицепную тележку, автомобильный. аккумулятор, комплект губок схвата различной конфигурации, кронштейны - держатели разрушителей взрывоопасных предметов, причем мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства, причем каждый видеоблок содержит видеокамеру, заключенную в защитный кожух с источниками подсветки, и, по меньшей мере, один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом на транспортном средстве укреплены манипулятор с захватным устройством и его приводы, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации, дополнительно снабжен устройством подсветки, смонтированном на беспилотном летательном аппарате винтового типа и связанным с постом дистанционного управления через систему управления и дистанционной связи системы видеонаблюдения.
Обозначенная сущность изобретения связана с достижением каждого заявленного технического результата и всей их совокупности следующим образом соответственно.
1. Введение в комплекс устройства подсветки, смонтированном на беспилотном летательном аппарате винтового типа и связанным с постом дистанционного управления через систему управления и дистанционной связи системы видеонаблюдения позволит при необходимости, например, при плохой естественной освещенностиполучать точную непрерывную визуальную информацию о месте работы с разных ракурсов путем включения устройства подсветки с поста дистанционного управления. Таким образом, будут обеспечены возможность получать точную непрерывную визуальную информацию о месте работы с необходимых ракурсов в любых условиях обстановки и оперативно менять освещенность места работы.
2. Повышение точности позиционирования самого мобильного робота и точности дистанционных манипуляций с удаленными предметами обеспечивается возможностью оперативно получать точную непрерывную визуальную информацию о месте работы с необходимых ракурсов в любых условиях обстановки и оперативно менять освещенность места работы (см. п. 1)
3. Мобильный робототехнический комплекс является дорогостоящим высокотехнологичным изделием, срок службы которого во многом зависит от возможности оперативно получать точную непрерывную визуальную информацию о месте работы с необходимых ракурсов в любых условиях обстановки и оперативно менять освещенность места работы (см. п. 1).
4. Снижение психоэмоционального напряжения операторов при работе с взрывоопасными предметами обеспечивается возможностью оперативно получать точную непрерывную визуальную информацию о месте работы с необходимых ракурсов в любых условиях обстановки и оперативно менять освещенность места работы (см. п. 1).
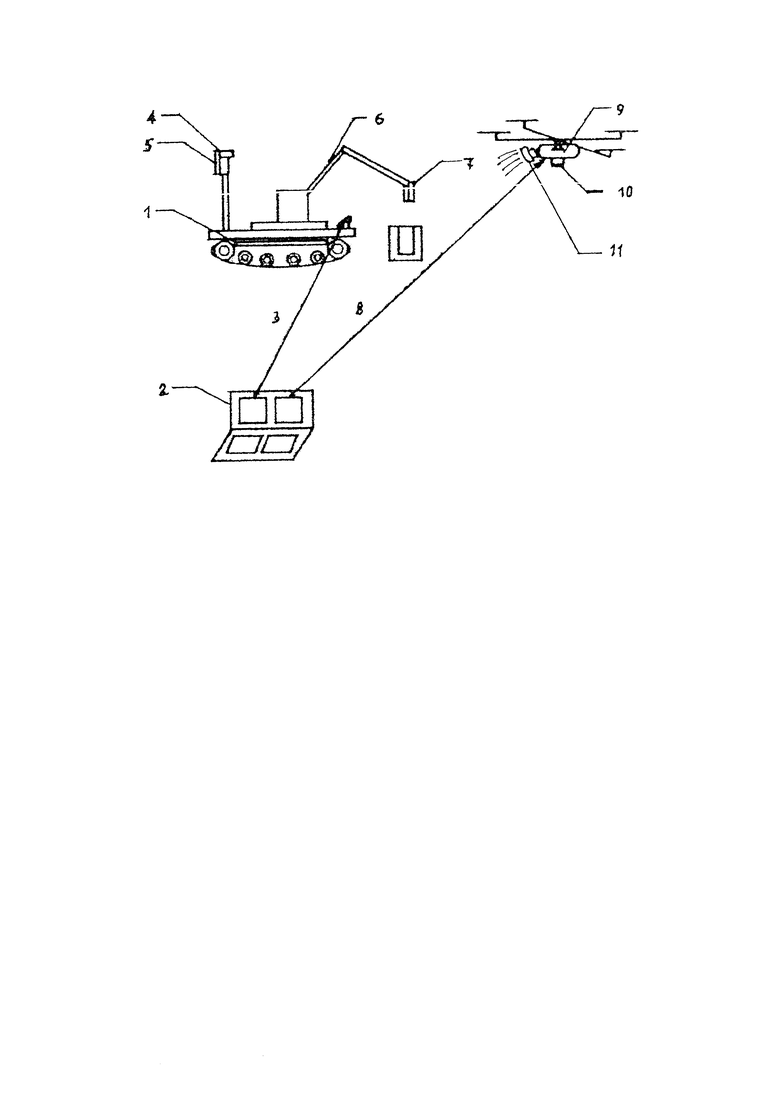
На рисунке изображена структурная схема полезной модели.
Мобильный робототехнический комплекс включает в свой состав мобильный робот (1), интегрированный пост дистанционного управления (2), систему двусторонней связи (не показана) между постом (2) и роботом (1), обеспечивающую канал связи (3) и комплект дополнительного оборудования. В базовый комплект дополнительного оборудования входят различные 1 устройства и механизмы, которыми оснащается робот, применительно к конкретной оперативной задаче. В этот комплект входят транспортная прицепная тележка, автомобильный эвакуатор, комплект губок схвата различной конфигурации, кронштейны-держатели разрушителей взрывоопасных предметов и другие элементы (не показаны). Собственно мобильный робот (1) представляет собой самоходное телеуправляемое транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной двусторонней связи с постом управления (2) и бортовая телевизионная система. Бортовая телевизионная система включает в себя отдельные видеоблоки, расположенные на звеньях манипулятора и на корпусе транспортного средства, в состав каждого видеоблока, в свою очередь, входит видеокамера, заключенная в защитный кожух с источниками подсветки. Один из видеоблоков (4), выполняющий обзорные функции, располагается на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях (5). На транспортном средстве также укреплены приводы многостепенного манипулятора (не показаны) и сам манипулятор (6) с захватным устройством (7), система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации (не показаны). Кроме того, комплекс снабжен системой видеонаблюдения, смонтированной на беспилотном летательном аппарате винтового типа с собственной системой управления и связи, обеспечивающей канал (8) связи и управления системы видеонаблюдения и интегрированного поста дистанционного управления (2). Система видеонаблюдения представляет собой видеоблок (10), смонтированный на беспилотном летательном аппарате винтового типа (9). На этом же беспилотном летательном аппарате смонтирована система управления и дистанционной связи с базовым удаленным постом управления системы, в качестве которого может быть использован или пост, интегрированный в общий пост (2) дистанционного управления мобильным робототехническим комплексом, или, как вариант, отдельный пост управления беспилотным летательным аппаратом, системой видеонаблюдения и устройством подсветки (не показан).
Отличительной особенностью комплекса является то, что он дополнительно снабжен устройством подсветки (11), смонтированном на беспилотном летательном аппарате винтового типа (9) и связанным с постом дистанционного управления (2) через систему управления и дистанционной связи системы видеонаблюдения.
Устройство подсветки (11) может быть выполнено например, в виде прожектора видимого света или, как вариант, инфракрасного прожектора.
Мобильный робототехнический комплекс функционирует следующим образом. Для решения оперативной задачи, предусматривающей повышенную точность позиционирования самого мобильного робота, повышенную точность дистанционных манипуляций с удаленными предметами, во всех других случаях, когда необходимо получение точной непрерывной визуальной информации о месте работы, когда необходимо обеспечить улучшенный обзор окружающего мобильный робот пространства в условиях недостаточного естественного освещения, - в этих случаях, мобильный робототехнический комплекс оснащается устройством подсветки (11), смонтированном на беспилотном летательном аппарате винтового типа (9) и электрически подключенным к системе управления и дистанционной связи системы видеонаблюдения. В случае, когда необходимо скрытно осуществлять подсветку робота и его места работы комплекс оснащается устройством подсветки, работающим в инфракрасном диапазоне электромагнитных волн. Оператор приводит в действие беспилотный тетательный аппарат и дистанционно активирует смонтированную на нем систему видеонаблюдения. Система передает на пост управления видеосигнал, позволяющий определить оптимальный маршрут движения робота, и в дальнейшем при начале работы робота передает видеосигналы с места его работы. В случае получения оператором на посту дистанционного управления (2) недостаточно четких изображений робота или его места работы он дистанционно активирует устройство подсветки (11). Управление работой мобильного робототехнического комплекса, включая управление системами и механизмами мобильного робота, системы видеонаблюдения и устройства подсветки, может осуществляться как с единого интегрированного поста дистанционного управления (2) одним оператором, так и с отдельных постов управления мобильным роботом, беспилотным летательным аппаратом, системой видеонаблюдения и устройством подсветки двумя операторами, находящимися в вербальном контакте.
Таким образом, предлагаемый мобильный робототехнический комплекс позволяет расширить функциональные возможности, повысить эффективность использования и надежность работы комплекса за счет обеспечения возможности получать точную непрерывную визуальную информацию о месте работы с необходимых ракурсов в любых условиях обстановки и оперативно менять освещенность места работы, повышения точности дистанционных манипуляций с предметами и увеличения срока службы комплекса.
Источники информации:
1. Патент 2574547, Российская Федерация, МПК В251 5/00. Мобильный роботехнический комплекс [Текст] / Залюбовский А.Ф. и др.; заявитель и патентообладательФедеральное государственное казенное военное учреждение высшего профессионального образования «Военная академия материально-технического обеспечения имени генерала армии А.В. Хрулева». - №2014124106/02; заявл. 11.06.2014; опубл. 10.02.2016.
2. Патент 2364500, Российская Федерация, МПК В251 5/00. Мобильный роботехнический комплекс [Текст] / Лебедев В.В. и др.; заявитель и патентообладатель ОАО «Ковровский электромеханический завод». - №2007140387/02; заявл. 31.10.07; опубл. 20.08.09.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2574547C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| Средство транспортное роботизированное | 2023 |
|
RU2822947C1 |
| РОБОТОТЕХНИЧЕСКИЙ РАЗВЕДЫВАТЕЛЬНЫЙ КОМПЛЕКС АМФИБИЙНЫЙ | 2017 |
|
RU2654898C1 |
| Способ наземной и воздушной доставки постановщиков радиопомех с использованием мобильного робототехнического комплекса радиоэлектронной борьбы | 2016 |
|
RU2652914C1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2018 |
|
RU2716050C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2012 |
|
RU2506157C1 |
Изобретение относится к робототехническим комплексам, предназначенным для дистанционной работы в труднодоступных и опасных для присутствия человека местах. Мобильный робототехнический комплекс содержит мобильный робот, пост дистанционного управления, беспилотный летательный аппарат винтового типа, содержащий систему видеонаблюдения с собственной системой управления и дистанционной связи с постом дистанционного управления. При этом мобильный робот представляет собой самоходное транспортное средство с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства. Комплекс снабжен устройством подсветки, смонтированным на беспилотном летательном аппарате винтового типа и связанным с постом дистанционного управления через систему управления и дистанционной связи системы видеонаблюдения. Изобретение обеспечивает возможность получать точную непрерывную визуальную информацию о месте работы с необходимых ракурсов в любых условиях обстановки и оперативно менять освещенность места работы, повышает точность дистанционных манипуляций с предметами и увеличивает срок службы мобильного робототехнического комплекса. 1 ил.
Мобильный робототехнический комплекс, содержащий мобильный робот, пост дистанционного управления, беспилотный летательный аппарат винтового типа, содержащий систему видеонаблюдения с собственной системой управления и дистанционной связи с постом дистанционного управления, комплект дополнительного оборудования, содержащий транспортную прицепную тележку, автомобильный аккумулятор, комплект губок схвата различной конфигурации, кронштейны - держатели разрушителей взрывоопасных предметов, причем мобильный робот выполнен в виде самоходного транспортного средства с электроприводом движителя и бортовыми источниками питания, на котором смонтированы система дистанционной связи с постом дистанционного управления, бортовая телевизионная система, которая включает отдельные видеоблоки, расположенные на звеньях многостепенного манипулятора и на корпусе транспортного средства, причем каждый видеоблок содержит видеокамеру, заключенную в защитный кожух с источниками подсветки, и по меньшей мере один из видеоблоков, выполняющий обзорные функции, расположен на рабочем органе привода индивидуального наведения в горизонтальной и вертикальной плоскостях, при этом на транспортном средстве укреплены манипулятор с захватным устройством и его приводы, система сигнализации, разъемы для подключения бортового, сервисного оборудования и зарядного устройства, кронштейны для укрепления бортового оборудования и бортовая система диагностики с бортовыми пультами управления и устройствами индикации, отличающийся тем, что он снабжен устройством подсветки, смонтированным на беспилотном летательном аппарате винтового типа и связанным с постом дистанционного управления через систему управления и дистанционной связи системы видеонаблюдения.
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2574547C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2007 |
|
RU2364500C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| US 4932831 A1, 12.06.1990 | |||
| Ткацкий станок для изготовления драночного полотна | 1937 |
|
SU54670A1 |

