Область техники, к которой относится изобретение
Настоящее изобретение относится к способу анализа сигналов лазерного дальномера. Уровень техники
Предпочтительно, дальномер представляет собой лазерный дальномер. Лазерные дальномеры также называют системами LIDAR (или лидарами). Лазерные дальномеры измеряют расстояние от точек измерения до сенсорной точки (точки приема сигнала) лазерного дальномера. Лазерные дальномеры, сканирующие двумерное или трехмерное пространство, также называют лазерными сканерами.
В патентной заявке ЕР 3300561 А1 раскрыта самоходная уборочная машина с лазерным сканером. Лазерный сканер служит для определения технологической колеи для самоходной уборочной машины.
Раскрытие сущности изобретения
Задачей изобретения является усовершенствование анализа сигналов дальномера.
Согласно изобретению, задача решена способом анализа сигналов дальномера, в частности лазерного дальномера,
причем дальномер содержит по меньшей мере одну сенсорную точку,
причем дальномер выполняет измерения циклично,
причем дальномер выдает несколько точек измерения для каждого измерения,
причем каждая точка измерения задает расстояние до сенсорной точки,
причем дальномер измеряет расстояния в нескольких направлениях, и каждую точку измерения соотносят с углом в горизонтальной плоскости,
причем несколько точек измерения на основании расстояния разделяют на полезные сигналы и паразитные сигналы,
причем точки измерения на расстоянии меньше первого предельного значения идентифицируют как паразитные сигналы, а точки измерения на расстоянии больше первого предельного значения - как полезные сигналы,
причем полезные сигналы относят к первому диапазону измерения, если полезные сигналы удовлетворяют предварительно заданному условию расстояния и угла в горизонтальной плоскости,
причем количество полезных сигналов в первом диапазоне измерения определяют и сравнивают с первым пороговым значением,
причем если количество полезных сигналов меньше первого порогового значения, выводят предупредительный сигнал.
Разделение точек измерения на полезные и паразитные сигналы в зависимости от расстояния - наиболее простая форма разделения. Разделение по расстоянию особенно полезно в тех случаях, когда приблизительно известно расстояние между измеряемыми объектами. Примером может служить самоходная сельскохозяйственная машина, например, зерноуборочный комбайн, кормоуборочный комбайн или трактор, использующий дальномер для обнаружения объектов в направлении движения. Если дальномер установлен в верхней части сельскохозяйственной машины и выполняет измерение в направлении вперед и вниз, предполагается, что на первых метрах отсутствуют объекты, подлежащие измерению. Полезные сигналы могут быть переданы в приложение для дальнейшей обработки. Предупредительный сигнал может уведомить пользователя или приложение о снижении качества сигнала. Пользователь или приложение могут отреагировать на это и при необходимости принять меры к улучшению качества сигнала. При необходимости можно использовать паразитные сигналы для подбора мер, подходящих для улучшения качества сигнала.
В качестве альтернативы предложен способ анализа сигналов дальномера, в частности, лазерного дальномера,
причем дальномер выполняет измерения циклично,
причем дальномер выдает несколько точек измерения для каждого измерения,
причем каждая точка измерения задает расстояние,
причем дальномер измеряет расстояния в нескольких направлениях, и каждую точку измерения соотносят с углом в горизонтальной плоскости,
отличающийся тем, что несколько точек измерения на основании расстояния разделяют на полезные сигналы и паразитные сигналы,
причем точки измерения на расстоянии меньше первого предельного значения идентифицируют как паразитные сигналы, а точки измерения на расстоянии больше первого предельного значения - как полезные сигналы,
причем количество паразитных сигналов определяют, и выводят предупредительный сигнал, если количество паразитных сигналов удовлетворяет предварительно заданному условию.
Кроме того, изобретение относится к системе анализа сигнала с дальномером и вычислительным модулем, при этом дальномер соединен с вычислительным модулем с возможностью передачи данных, а вычислительный модуль предназначен и выполнен с возможностью осуществления способа согласно изобретению. Сигналы дальномера поступают на вычислительный модуль и разделяются вычислительным модулем на полезные сигналы и паразитные сигналы.
Предпочтительно, дальномер установлен на самоходной сельскохозяйственной машине. Когда самоходная сельскохозяйственная машина работает в поле, часто образуется пыль и грязь, ухудшающие качество сигнала дальномера. Поэтому применение способа, предложенного изобретением, в этом случае особенно выгодно.
Предпочтительно, первое предельное значение составляет менее шести метров. Если дальномер установлен на крыше самоходной сельскохозяйственной машины, ожидается, что измеряемые объекты будут находиться на расстоянии более шести метров.
Кроме того, предпочтительно, первое предельное значение составляет более трех метров. Если дальномер установлен на самоходной сельскохозяйственной машине, не следует ожидать измеряемых объектов на расстоянии меньше трех метров.
Предпочтительно, паразитные сигналы разделяют на сигналы от пыли и сигналы от грязи, причем паразитные сигналы на расстоянии меньше второго предельного значения идентифицируют как сигналы от грязи, а паразитные сигналы на расстоянии больше второго предельного значения - как сигналы от пыли. Разделение на сигналы от пыли и сигналы от грязи в зависимости от расстояния позволяет дифференцировать причину возникновения паразитных сигналов. Дальномеры обычно устанавливают за кожухом в целях обеспечения защиты. Кожух защищает дальномер от повреждений. В случае лазерного дальномера кожух обычно представляет собой прозрачное стекло. Дальномеры испускают измерительные сигналы и принимают отраженные измерительные сигналы. Расстояние определяют по времени прохождения измерительных сигналов. Сигналы от грязи обусловлены отражением измерительных сигналов от грязи, скопившейся на кожухе. Сигналы от пыли обусловлены отражением измерительных сигналов от частиц пыли между кожухом и измеряемым объектом.
Предпочтительно, второе предельное значение больше расстояния между сенсорной точкой и кожухом, так как измерительный сигнал может многократно отразиться после отражения от грязи до того, как будет поглощен датчиком. Предпочтительно, второе предельное значение составляет более тридцати сантиметров.
Предпочтительно, второе предельное значение составляет менее одного метра. При этом предполагается, что на расстоянии более одного метра сигналы не будут вызываться отражением от загрязнений.
Предпочтительно, полезные сигналы, превышающие третье предельное значение, игнорируются при определении количества полезных сигналов. Точки измерения на очень большом расстоянии, как правило, не отражаются непосредственно от измеряемых объектов, но образуются многократным отражением или необычными внешними условиями. Поэтому такие точки измерения не считаются полезными сигналами и игнорируются.
Предпочтительно, третье предельное значение составляет более четырнадцати метров. Сигналы на расстоянии меньше четырнадцати метров считаются имеющими смысл полезными сигналами.
Предпочтительно, третье предельное значение составляет менее двадцати метров. На расстоянии более двадцати метров не следует ожидать каких-либо имеющих смысл полезных сигналов. При использовании дальномеров на сельскохозяйственных машинах диапазон более двадцати метров, как правило, не имеет значения для области применения, в которой обрабатываются полезные сигналы.
Предпочтительно, полезные сигналы распределяют по большому количеству диапазонов измерений, причем при распределении полезных сигналов по диапазонам измерений учитывают угол в горизонтальной плоскости и дальность полезных сигналов. Распределение полезных сигналов по диапазонам измерений позволяет повысить эффективность выполнения многих задач, так как при этом будут учитываться только полезные сигналы из соответствующих диапазонов измерений. В результате сокращается объем обрабатываемых данных и повышается эффективность выполнения задачи.
Предпочтительно, с каждой точкой измерения соотносят угол в вертикальной плоскости, причем при распределении полезных сигналов по диапазонам измерений учитывают угол в вертикальной плоскости. Для точек измерения с различными углами в вертикальной плоскости диапазоны измерения можно также различать по углу в вертикальной плоскости. Дополнительное разделение диапазонов измерения позволяет повысить эффективность использования.
Предпочтительно, для каждого полезного сигнала положение по расстоянию и углам в горизонтальной и вертикальной плоскости преобразуют в декартову систему координат, причем положение в декартовой системе координат проецируют на плоскость, а первый диапазон измерений в плоскости имеет форму прямоугольника. Положение каждой точки измерения обычно выражают в полярных координатах как комбинацию расстояния и углов в горизонтальной и вертикальной плоскости. Для некоторых применений имеет смысл определить диапазон измерения в виде прямоугольника в плоскости. Для этого определяют проекцию точек измерения на плоскость, после чего на основании этой проекции определяют, какому диапазону измерения соответствует каждая точка измерения.
Предпочтительно, для первого паразитного сигнала рассчитывают прямую, определяемую углом в вертикальной плоскости, углом в горизонтальной плоскости и сенсорной точкой, и первый паразитный сигнал относят к первому диапазону измерения, если прямая пересекает плоскость. Таким образом, если прямые паразитных сигналов пересекают плоскость в пределах первого диапазона измерения, к диапазону измерений относят те паразитные сигналы, которые искажают измерения в первом диапазоне измерения. Паразитные сигналы, прямые которых не пересекают плоскость или пересекают ее вне первого диапазона измерения, не искажают измерение в пределах диапазона измерения.
В альтернативном варианте паразитные сигналы соотносят с несколькими диапазонами углов, причем при отнесении паразитных сигналов к диапазонам углов учитывают угол паразитных сигналов в горизонтальной плоскости. Предпочтительно, при отнесении сигналов от пыли и/или сигналов от грязи к диапазонам углов учитывают угол в вертикальной плоскости. Предпочтительно, каждому диапазону измерения назначают свой диапазон углов. По аналогии с отнесением полезных сигналов к диапазонам измерения паразитные сигналы относят к диапазонам углов. Это повышает эффективность обработки паразитных сигналов. При этом каждый диапазон углов, предпочтительно, относят к диапазону измерений, измерение в котором искажают паразитные сигналы в диапазоне углов. При этом геометрическая форма диапазонов измерений и диапазонов углов может различаться. Поскольку не всегда очевидно, какие именно паразитные сигналы искажают измерения в определенных диапазонах измерений, диапазоны углов могут также содержать паразитные сигналы, не искажающие измерения в определенном диапазоне измерений.
Если при каком-либо измерении количество полезных сигналов в первом диапазоне измерения будет меньше первого порогового значения, предпочтительно, сравнивают количество сигналов от пыли и количество сигналов от грязи при измерении в заданном диапазоне углов, причем выводят сигнал о необходимости удаления пыли, если количество сигналов от пыли больше количества сигналов от грязи, при этом выводят сигнал о необходимости очистки, если количество сигналов от грязи больше количества сигналов от пыли. Если количество полезных сигналов в первом диапазоне измерений становится меньше первого порогового значения, необходимо принять меры по улучшению качества сигнала. Сравнение сигналов от пыли с сигналами от грязи указывает на желательность удаления пыли или грязи, причем выводится соответствующий сигнал.
В одном из вариантов осуществления сигнал о необходимости удаления пыли выводят, если количество сигналов от пыли больше второго порогового значения. Вывод сигнала о необходимости удаления пыли, когда количество сигналов от пыли больше второго порогового значения, то есть даже если количество полезных сигналов в первом диапазоне измерений больше первого порогового значения, позволяет принять меры по улучшению качества сигнала еще до ухудшения качества сигнала.
В одном из вариантов осуществления сигнал о необходимости очистки выводят, если количество сигналов от грязи больше второго порогового значения. Предпочтительно, второе пороговое значение составляет менее трети от количества точек измерения текущего измерения.
В другом варианте осуществления сигнал о необходимости очистки выводят, если количество сигналов от грязи больше третьего порогового значения. Предпочтительно, третье пороговое значение составляет менее трети от количества точек измерения текущего измерения.
В следующем варианте осуществления сигнал о необходимости удаления пыли выводят, если количество сигналов от пыли в диапазоне углов больше четвертого порогового значения. Под диапазоном углов, предпочтительно, понимают диапазон углов, назначенный первому диапазону измерений. Ограничение диапазоном углов позволяет регистрировать сигналы от пыли в особо релевантном диапазоне. Предпочтительно, величина четвертого порогового значения зависит от величины диапазона углов. Предпочтительно, четвертое пороговое значение составляет менее трети от количества измерительных сигналов, проходящих через диапазон углов.
В следующем варианте осуществления сигнал о необходимости очистки выводят, если количество сигналов от грязи в диапазоне углов больше пятого порогового значения. Под диапазоном углов, предпочтительно, понимают диапазон углов, назначенный первому диапазону измерений. Ограничение диапазоном углов позволяет регистрировать сигналы от грязи в особо значимом диапазоне. Предпочтительно, величина пятого порогового значения зависит от величины диапазона углов. Предпочтительно, пятое пороговое значение составляет менее трети от количества измерительных сигналов, проходящих через диапазон углов.
В предпочтительном варианте осуществления сигналы от грязи с расстоянием меньше четвертого порогового значения игнорируются при определении количества сигналов от грязи, причем четвертое пороговое значение, предпочтительно, составляет более десяти сантиметров. Дальномеры часто заключают в кожух, и измерительные сигналы выходят из кожуха через прозрачную пластину, причем некоторые измерительные сигналы отражаются от пластины. Такие сигналы не вызваны ни грязью или пылью, ни отражением от измеряемых объектов. Поэтому эти сигналы игнорируют при определении количества сигналов от грязи.
Предпочтительно, первое пороговое значение составляет менее половины количества точек измерения в текущем измерении.
В особенно предпочтительном варианте первое пороговое значение составляет менее трети количества точек измерения в текущем измерении.
Краткое описание чертежей
Изобретение подробно рассмотрено ниже на примере вариантов осуществления, изображенных на следующих фигурах не в масштабе:
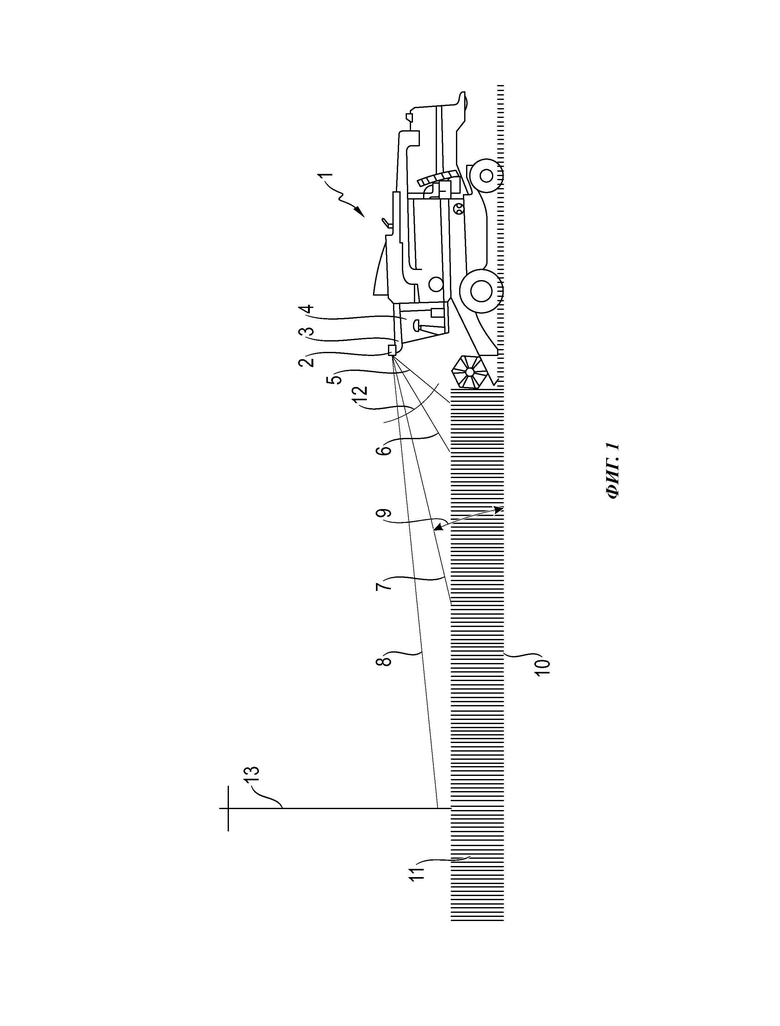
Фигура 1: самоходная сельскохозяйственная машина с дальномером, вид сбоку.
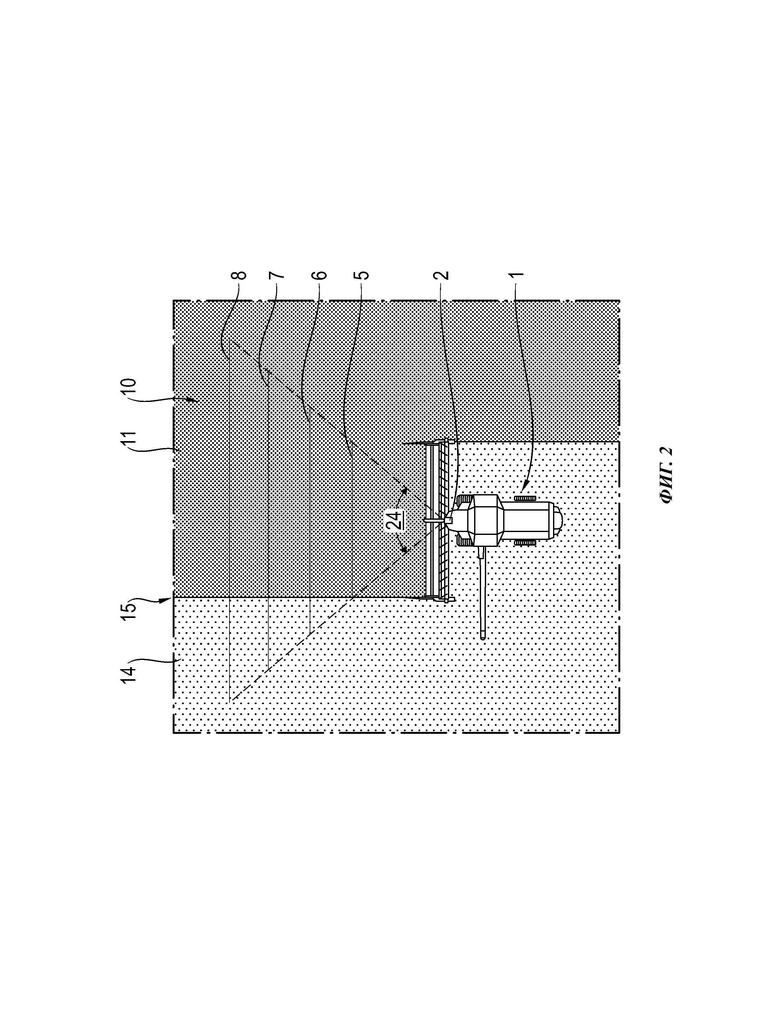
Фигура 2: самоходная сельскохозяйственная машина с дальномером, вид в плане.
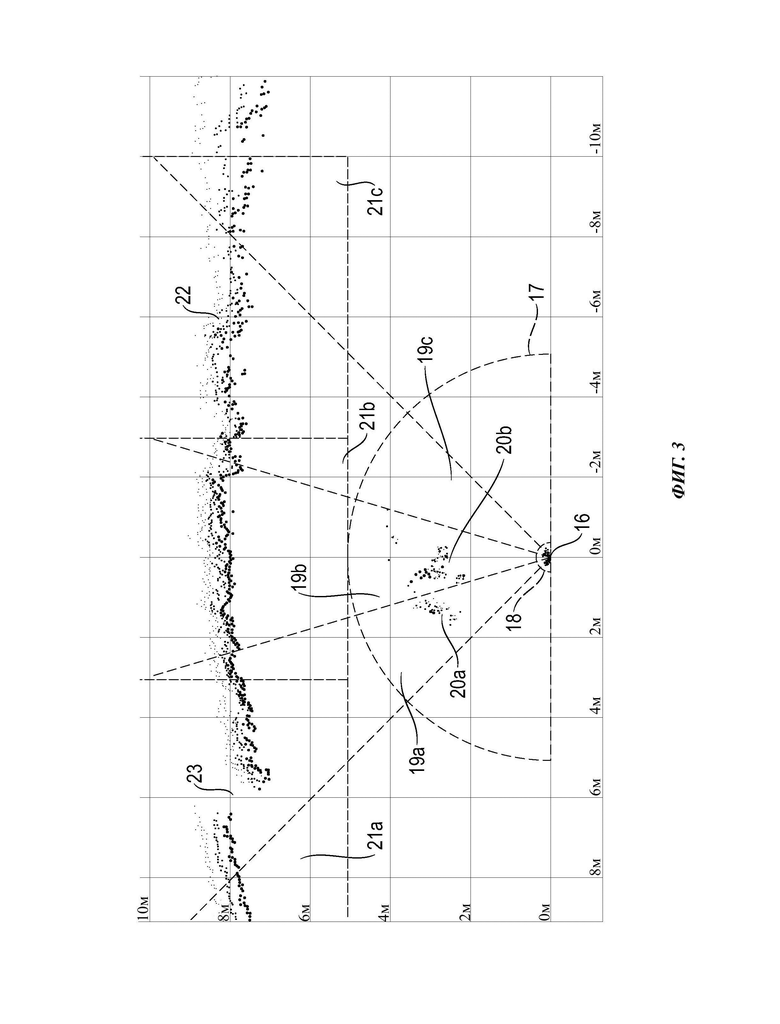
Фигура 3: точки измерения одного измерения.
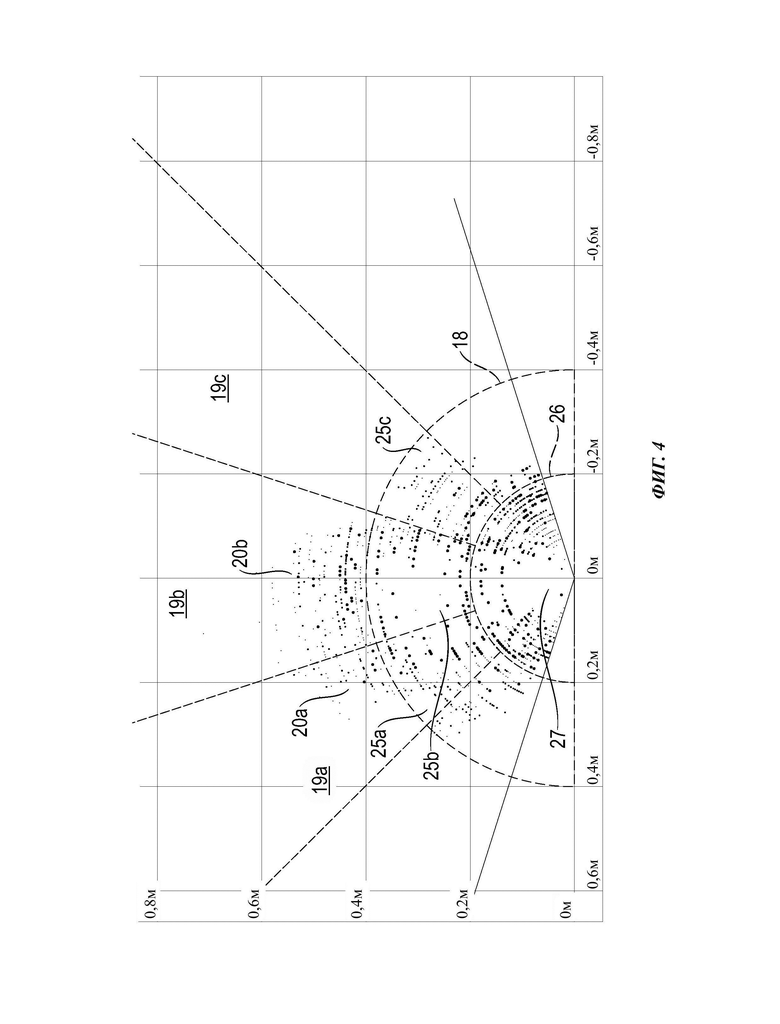
Фигура 4: точки измерения одного измерения.
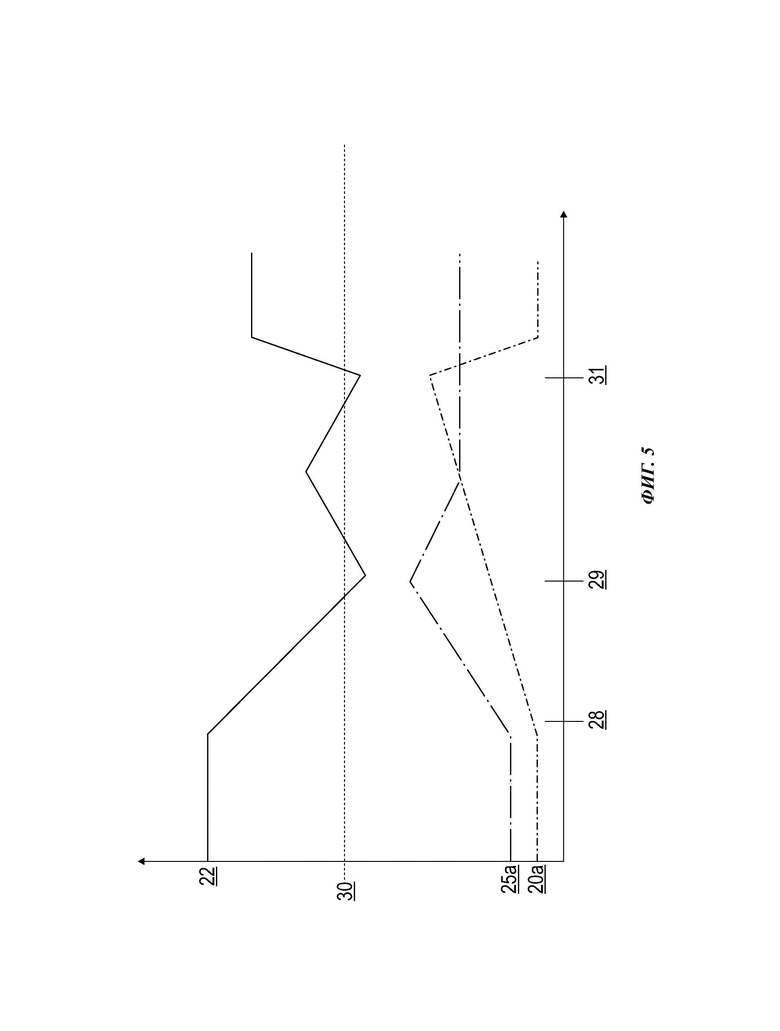
Фигура 5: количество точек измерения в зависимости от времени.
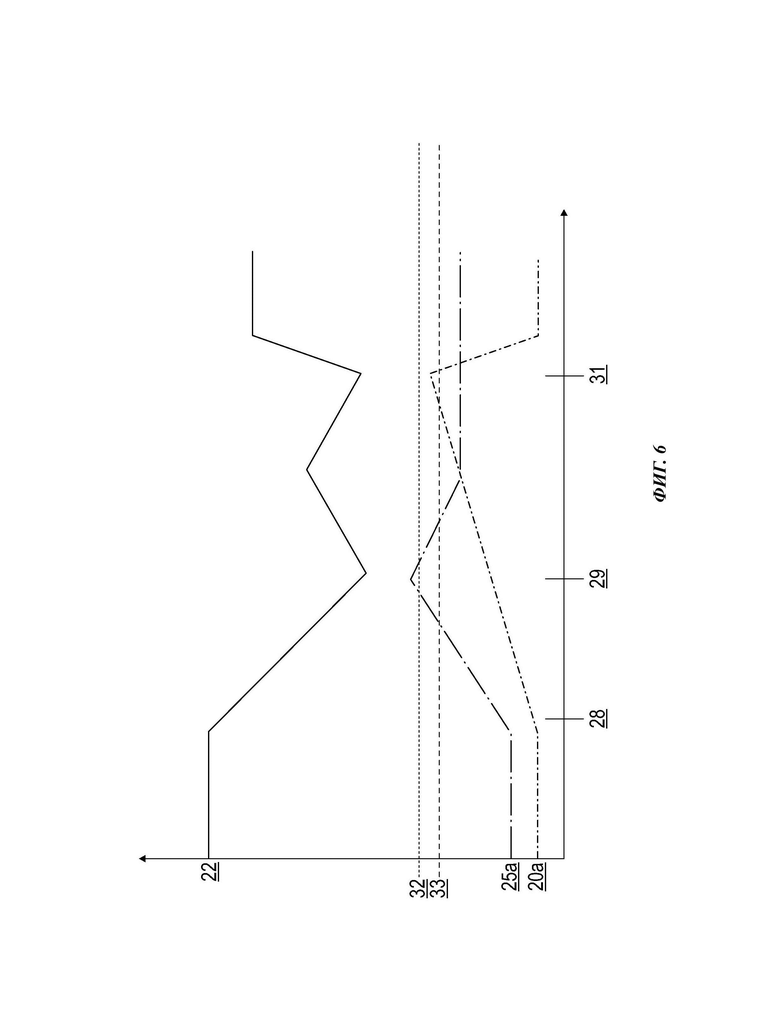
Фигура 6: количество точек измерения в зависимости от времени.
Осуществление изобретения
На фигуре 1 изображена самоходная сельскохозяйственная рабочая машина 1 с дальномером 2. В данном примере сельскохозяйственная рабочая машина 1 представляет собой зерноуборочный комбайн, а дальномер 2 закреплен на крыше 3 кабины 4 водителя. В данном примере дальномер 2 представляет собой лазерный дальномер (т.е. лидар). Дальномер 2 излучает измерительные сигналы 5, 6, 7, 8 с различными углами 9 в вертикальной плоскости. Измерительные сигналы 5, 6, 7, 8 излучаются в направлении поля 10 перед рабочей машиной 1. На поле 10 произрастает убираемая культура 11. Полезными сигналами считают измерительные сигналы 5, 6, 7, 8, дальность которых больше первого предельного значения 12. Первый измерительный сигнал 5, второй измерительный сигнал 6 и третий измерительный сигнал 7 отражаются культурой 11. Четвертый измерительный сигнал 8 отражается препятствием 13. Поскольку все измерительные сигналы 5, 6, 7, 8 отражаются измеряемыми объектами, расстояние до которых больше первого предельного значения 12, все точки измерения, полученные от измерительных сигналов, идентифицируют как полезные сигналы. Обработку точек измерения может выполнять установленный на датчике вычислительный модуль (не показан на фигуре) или другой вычислительный модуль, соединенный с датчиком с возможностью передачи данных, причем датчик передает точки измерения на вычислительный модуль. Рабочая машина 1 оснащена устройством для удаления пыли (не показанным на фигуре). Устройство для удаления пыли можно использовать, в частности, для уменьшения количества пыли перед дальномером 2. Кроме того, рабочая машина 1 оснащена устройством для очистки (не показанным на фигуре). Устройство для очистки можно использовать, в частности, для удаления грязи с кожуха дальномера 2.
На фигуре 2 изображена самоходная сельскохозяйственная рабочая машина 1 с дальномером 2. Дальномер 2 излучает измерительные сигналы 5, 6, 7, 8 с различными углами в вертикальной плоскости (не показаны на фигуре). Вследствие различных углов в вертикальной плоскости измерительные сигналы 5, 6, 7, 8 попадают на поле 10 на различных расстояниях от рабочей машины 1. Во время измерения каждый измерительный сигнал излучают многократно с различными углами 24 в горизонтальной плоскости. Часть измерительных сигналов 5, 6, 7, 8 отражается убираемой культурой 11, а другая часть измерительных сигналов 5, 6, 7, 8 - жнивьем 14. По изменению отражений можно идентифицировать кромку 15 убираемой культуры. Обнаруженная кромка 15 убираемой культуры может использоваться, например, рулевым управлением для ведения рабочей машины 1 вдоль кромки 15 убираемой культуры. При этом рулевое управление может использовать тот же вычислительный модуль, на котором анализируются точки измерения, или другой вычислительный модуль.
На фигуре 3 изображены точки одного измерения. Показано расстояние до точек измерения и их угол в горизонтальной плоскости относительно сенсорной точки 16. Точки измерения меньше первого предельного значения 17 идентифицируют как паразитные сигналы. Первое предельное значение 17 в этом примере составляет пять метров. Паразитные сигналы разделяют на сигналы от пыли и сигналы от грязи на основании второго предельного значения 18. Второе предельное значение 18 в этом примере составляет сорок сантиметров. В данном примере паразитные сигналы отнесены к трем диапазонам 19а, 19b, 19 с углов. В первом диапазоне 19а углов распознается несколько сигналов 20а от пыли. Во втором диапазоне 19b углов распознается множество сигналов 20b от пыли. В третьем диапазоне 19 с углов сигналы от пыли не распознаются. Диапазон сигналов от грязи на этом изображении очень мал и раскрывается на фигуре 4.
Точки измерения с расстояниями больше первого предельного значения 17 идентифицируют как полезные сигналы 22. В данном примере полезные сигналы отнесены к трем диапазонам 21а, 21b, 21с измерений. В этом примере диапазоны 21а, 21b, 21с измерений имеют форму прямоугольника в декартовой системе координат. Каждый полезный сигнал 22 характеризуется расстоянием (дальностью), углом 24 в горизонтальной плоскости и углом 9 в вертикальной плоскости. Для отнесения к одному из диапазонов 21а, 21b, 21с измерений каждый полезный сигнал 22 проецируют на плоскость и определяют, в какой диапазон 21а, 21b, 21с измерений попадает проекция. В данном примере достаточное количество полезных сигналов 22 может быть распознано во всех трех диапазонах 21а, 21b, 21с измерений. В первом диапазоне 21а измерения может быть обнаружен пробел 23 в полезных сигналах 22. Пробел 23 соответствует кромке 15 убираемой культуры.
На фигуре 4 показаны точки измерения на малом расстоянии. В первом диапазоне 19а углов показано несколько сигналов 20а от пыли с расстояниями, большими второго предельного значения 18, и много сигналов 25а от пыли с расстояниями, меньшими второго предельного значения 18. Во втором диапазоне 19b углов показано много сигналов 20b от пыли и несколько сигналов 25b от грязи. В третьем диапазоне 19 с углов нет сигналов от пыли и имеется много сигналов 25с от грязи. На расстоянии меньше третьего предельного значения 26 показаны точки измерения с очень малыми расстояниями 27. Эти точки 27 измерения вызваны отражением измерительных лучей от корпуса дальномера. Так как эти точки измерения имеют место всегда, даже в отсутствие грязи на корпусе, они не учитываются при определении количества сигналов от грязи.
На фигуре 5 показано количество точек измерения в первом диапазоне 21а измерений и первом диапазоне 20а углов в зависимости от времени. При этом точки измерения разделены на полезные сигналы 22, сигналы 20а от пыли и сигналы 25а от грязи. В начале графика в первый момент 28 времени дальномер чист, и количество сигналов 25а от грязи невелико. Запыленность и количество сигналов 20а от пыли также невелико. Количество полезных сигналов 22 велико. С течением времени запыленность и количество сигналов 20а от пыли увеличивается, а количество полезных сигналов 22 уменьшается. Ко второму моменту 29 времени количество полезных сигналов 22 становится меньше первого порогового значения 30. После этого выводят предупредительный сигнал, и количество сигналов 20а от пыли сравнивают с количеством сигналов 25а от грязи. Так как количество сигналов 20а от пыли больше количества сигналов 25а от грязи, выводят сигнал о необходимости удаления пыли. Сигнал о необходимости удаления пыли активирует устройство для удаления пыли. Удаление пыли приводит к уменьшению количества сигналов 20а от пыли и увеличению количества полезных сигналов 22. Часть пыли с течением времени оседает в виде грязи перед дальномером, в результате чего количество сигналов 25а от грязи увеличивается, а количество полезных сигналов 22 уменьшается. К третьему моменту 31 времени количество полезных сигналов 22 становится меньше первого порогового значения 30. После этого выводят предупредительный сигнал и сравнивают количество сигналов 20а от пыли с количеством сигналов 25а от грязи. Так как количество сигналов 25а от грязи больше количества сигналов 20а от пыли, выводят сигнал о необходимости очистки. Сигнал о необходимости очистки активирует устройство очистки. Очистка приводит к уменьшению количества сигналов 20а от грязи и увеличению количества полезных сигналов 22.
На фигуре 6 показано количество точек измерения в первом диапазоне 21а измерений и первом диапазоне 20а углов в зависимости от времени. При этом точки измерения разделены на полезные сигналы 22, сигналы 20а от пыли и сигналы 25а от грязи. В начале графика в первый момент 28 времени дальномер чист, и количество сигналов 25а от грязи невелико. Запыленность и количество сигналов 20а от пыли также невелико. Количество полезных сигналов 22 велико. С течением времени запыленность и количество сигналов 20а от пыли увеличивается, а количество полезных сигналов 22 уменьшается. Ко второму моменту 29 времени количество сигналов 20а от пыли становится больше второго порогового значения 32, после чего выводят сигнал о необходимости удаления пыли. Сигнал о необходимости удаления пыли активирует устройство для удаления пыли. Удаление пыли приводит к уменьшению количества сигналов 20а от пыли и увеличению количества полезных сигналов 22. Часть пыли с течением времени оседает в виде грязи перед дальномером, в результате чего количество сигналов 25а от грязи увеличивается, а количество полезных сигналов 22 уменьшается. К третьему моменту 31 времени количество сигналов 25а от грязи становится больше третьего порогового значения 33, после чего выводят сигнал о необходимости очистки. Сигнал о необходимости очистки активирует устройство очистки. Очистка приводит к уменьшению количества сигналов 20а от грязи и увеличению количества полезных сигналов 22.
Количество сигналов от пыли и грязи можно также определять во всех диапазонах углов, а не только в первом диапазоне измерений. В этом случае сигнал о необходимости удаления пыли выводят, когда количество всех сигналов 20а, 20b от пыли становится больше четвертого порогового значения 32. Аналогичным образом сигнал о необходимости очистки выводят, когда количество всех сигналов 25а, 25b, 25с от грязи становится больше пятого предельного значения. Зависимость от времени аналогична зависимости, показанной на фигуре 6, с той разницей, что вместо паразитных сигналов первого диапазона углов учитываются все паразитные сигналы, а пороговые значения адаптируются.
Список ссылочных обозначений
1 рабочая машина
2 дальномер
3 крыша
4 кабина водителя
5 первый измерительный сигнал
6 второй измерительный сигнал
7 третий измерительный сигнал
8 четвертый измерительный сигнал
9 угол в вертикальной плоскости
10 поле
11 убираемая культура
12 первое предельное значение
13 препятствие
14 жнивье
15 кромка убираемой культуры
16 сенсорная точка
17 первое предельное значение
18 второе предельное значение
19а первый диапазон углов
19b второй диапазон углов
19с третий диапазон углов
20а сигналы от пыли
20b сигналы от пыли
21а первый диапазон измерений
21b второй диапазон измерений
21с третий диапазон измерений
22 полезные сигналы
23 пробел в измерениях
24 угол в горизонтальной плоскости
25а сигналы от грязи
25b сигналы от грязи
25с сигналы от грязи
26 четвертое предельное значение
27 точки измерения с очень малым расстоянием (дальностью)
28 первый момент времени
29 второй момент времени
30 первое пороговое значение
31 третий момент времени
32 второе пороговое значение
33 третье пороговое значение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Лазерный фазовый дальномер | 2015 |
|
RU2610514C2 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2019 |
|
RU2720268C1 |
| СКАНИРУЮЩИЙ ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2015 |
|
RU2609275C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 1998 |
|
RU2135954C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2015 |
|
RU2590311C1 |
| Лазерный дальномер | 1982 |
|
SU1075798A1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2007 |
|
RU2339909C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2014 |
|
RU2560011C1 |
| РУЧНОЙ ЛАЗЕРНЫЙ ДАЛЬНОМЕР | 2011 |
|
RU2602992C2 |
Изобретение относится к способу анализа сигналов лазерного дальномера, расположенного на самоходной сельскохозяйственной машине. Сущность предлагаемого способа анализа сигналов лазерного дальномера состоит в следующем. Лазерный дальномер выполняет измерения циклично, выдает несколько точек измерений, представляющих собой расстояния, в нескольких направлениях. При этом каждую точку измерения соотносят с углом в горизонтальной плоскости, затем полученные точки измерения на основании критерия расстояния разделяют на полезные и паразитные сигналы. При этом точки измерения на расстоянии меньше первого предельного значения идентифицируют как паразитные сигналы, а точки измерения на расстоянии больше первого предельного значения – как полезные сигналы. Техническим результатом заявленного изобретения является повышение эффективности работы лазерного дальномера самоходной сельскохозяйственной машины. 2 н. и 11 з.п. ф-лы, 6 ил.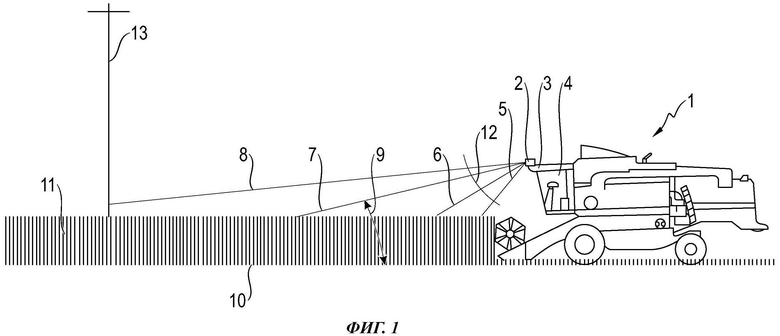
1. Способ анализа сигналов лазерного дальномера (2), причем лазерный дальномер (2) выполняет измерения циклично, причем лазерный дальномер (2) выдает несколько точек (20а, 20b, 22, 25а, 25b, 25с) измерения для каждого измерения, причем каждая точка измерения задает расстояние до сенсорной точки, причем лазерный дальномер (2) измеряет расстояния в нескольких направлениях, и каждую точку (20а, 20b, 22, 25а, 25b, 25с) измерения соотносят с углом (24) в горизонтальной плоскости, отличающийся тем, что на основании измеренных расстояний до точек (20а, 20b, 22, 25а, 25b, 25с) обеспечивается разделение на полезные сигналы (22) и паразитные сигналы, причем точки (20а, 20b, 22, 25а, 25b, 25с) измерения на расстоянии меньше первого предельного значения (12), располагающегося в диапазоне от трёх до шести метров, идентифицируют как паразитные сигналы (20а, 20b, 25а, 25b, 25с), а точки измерения на расстоянии больше первого предельного значения - как полезные сигналы (22), при этом определяют количество паразитных сигналов и выводят предупредительный сигнал, если количество паразитных сигналов удовлетворяет предварительно заданному условию, при этом паразитные сигналы разделяют на сигналы (20а, 20b) от пыли и сигналы (25а, 25b, 25с) от грязи, причем паразитные сигналы (20а, 20b, 25а, 25b, 25с) на расстоянии меньше второго предельного значения (18), располагающегося в диапазоне от тридцати сантиметров до одного метра, идентифицируют как сигналы (25а, 25b, 25с) от грязи, а паразитные сигналы (20а, 20b, 25а, 25b, 25с) на расстоянии больше второго предельного значения (18) - как сигналы (20а, 20b) от пыли.
2. Способ по п.1, отличающийся тем, что паразитные сигналы (20а, 20b, 25а, 25b, 25с) относят к нескольким диапазонам (19а, 19b, 19с) углов, причем при отнесении паразитных сигналов (20а, 20b, 25а, 25b, 25с) к диапазонам (19а, 19b, 19с) углов учитывают угол (24) в горизонтальной плоскости паразитных сигналов.
3. Способ по п.2, отличающийся тем, что полезные сигналы (22) относят к нескольким диапазонам (21а, 21b, 21с) измерений, причем при отнесении полезных сигналов (22) к диапазонам (21а, 21b, 21с) измерений учитывают угол (24) полезных сигналов (22) в горизонтальной плоскости.
4. Способ по п.3, отличающийся тем, что первый диапазон (21а) измерений соотносят с первым диапазоном (19а) углов.
5. Способ по пп.1, 2, отличающийся тем, что предупредительный сигнал представляет собой сигнал о необходимости удаления пыли, причем предварительно заданным условием является то, что количество сигналов (20а, 20b) от пыли больше второго порогового значения (32).
6. Способ по пп.1, 2, отличающийся тем, что предупредительный сигнал представляет собой сигнал о необходимости очистки, причем предварительно заданным условием является то, что количество сигналов (25а, 25b, 25с) от грязи больше третьего порогового значения (33).
7. Способ по п.4, отличающийся тем, что предупредительный сигнал представляет собой сигнал о необходимости удаления пыли, причем предварительно заданным условием является то, что для одного измерения количество полезных сигналов (22) в первом диапазоне (21а) измерений меньше первого порогового значения (30), а количество сигналов (20а) от пыли в первом диапазоне (19а) углов больше количества сигналов (25а) от грязи в первом диапазоне (19а) углов.
8. Способ по п.4, отличающийся тем, что предупредительный сигнал представляет собой сигнал о необходимости очистки, причем предварительно заданным условием является то, что для одного измерения количество полезных сигналов (22) в первом диапазоне (21а) измерений меньше первого порогового значения (30), а количество сигналов (25а) от грязи в первом диапазоне (19а) углов больше количества сигналов (20а) от пыли в первом диапазоне (19а) углов.
9. Способ по п.5 или 7, отличающийся тем, что сигнал о необходимости удаления пыли приводит к выводу рекомендации пользователю.
10. Способ по п.5 или 7, отличающийся тем, что сигнал о необходимости удаления пыли приводит к активации устройства для удаления пыли.
11. Способ по п.6 или 8, отличающийся тем, что сигнал о необходимости очистки приводит к выводу рекомендации пользователю.
12. Способ по п.6 или 8, отличающийся тем, что сигнал о необходимости очистки приводит к активации устройства очистки.
13. Самоходная сельскохозяйственная рабочая машина (1), содержащая лазерный дальномер (2), причем лазерный дальномер (2) ориентирован, по существу, в направлении движения рабочей машины, причем самоходная сельскохозяйственная рабочая машина (1) оснащена устройством для удаления пыли, причем самоходная сельскохозяйственная рабочая машина (1) оснащена устройством очистки лазерного дальномера (2), причем самоходная сельскохозяйственная рабочая машина (1) оснащена вычислительным устройством, отличающаяся тем, что вычислительное устройство предусмотрено и выполнено с возможностью осуществления способа по одному из предыдущих пунктов.
| EP 3300561 B1, 17.11.2021 | |||
| US 0009043129 B2, 26.05.2015 | |||
| DE 102016202627 A1, 24.08.2017 | |||
| Сельскохозяйственный робот-комбайн | 2019 |
|
RU2728225C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ПАРАМЕТРОМ УБОРОЧНОЙ ЖАТКИ | 2019 |
|
RU2747303C2 |

