Изобретение относится к области робототехники, в частности к оптико-электронным приборам, предназначенным для построения карты местности, измерения расстояния от точки установки прибора до точки пересечения измерительного луча прибора с препятствием.
Получение реальной и точной картины окружающего пространства и обеспечение возможности надежной передачи и управления информацией на расстояние играет важную роль при создании систем удаленного управления и доступа в разных областях техники. В робототехнике используются системы с лазерными излучателями, позволяющие измерять расстояния до объектов. Однако известные системы обладают рядом недостатков, связанным с ограничением угла поворота лазера и, как следствие, угла обзора, также наличием большого количества подвижных контактов, снижающих ресурс данных систем.
Известна конструкция лазерного дальномера (RU 18851, 20.07.2001 г.), содержащая лазер, шаговый двигатель с закрепленным на его конце отражающим зеркалом, блок приема и обработки отраженного луча, блок управления шаговым двигателем.
Данное устройство имеет ограниченный угол обзора, что не позволяет создать полноценную картину окружающего пространства, что в итоге ограничивает его использование. При этом блок приема и блок управления связаны между собой проводной связью, что также ограничивает применение данного устройства и не позволяет использовать такие устройства связи, как мобильные терминалы сбора данных (например, планшеты, мобильные телефоны).
Известна конструкция лазерного дальномера (RU 84580, 10.07.2009 г.), принятая за наиболее близкий аналог, которая содержит неподвижное основание, подвижное основание с возможностью поворота, с установленным на нем сканирующим лазером, блоком приема и обработки отраженного луча, шаговыми двигателями, обеспечивающими поворот системы.
Недостатками данного устройства являются наличие подвижных контактов между шаговыми двигателями и подвижным основанием, а также проводных связей между самими шаговыми двигателями, что снижает его надежность и ресурс, приводит к непостоянству количества измерений за оборот системы. Также полученные сведения о проведенном измерении передаются по проводному каналу связи, что является неудобным. Таким образом, формируемая картина местности имеет погрешности.
Задачей изобретения является создание компактного, технологичного устройства, обеспечивающего возможность вращения лазерного дальномера и построения достоверной картины окружающего пространства.
Технический результат изобретения заключается в расширении угла обзора устройства до 360 градусов и увеличении его ресурса.
Технический результат достигается при использовании сканирующего лазерного дальномера, содержащего основание, первый шаговый двигатель, выполненный с неподвижными обмотками и подвижным валом-магнитом, второй шаговый двигатель, выполненный с подвижными обмотками и неподвижным валом-магнитом, фиксатор вала второго шагового двигателя, зажим второго шагового двигателя, лазерный дальномер, расположенный на фиксаторе вала второго шагового двигателя, устройство механической передачи крутящего момента с подвижного вала-магнита первого шагового двигателя на подвижные обмотки второго шагового двигателя, электронное устройство для сбора информации и управления, беспроводные каналы связи, внешнее устройство приема информации.
Наличие основания, шагового двигателя с неподвижными обмотками и подвижным валом-магнитом, шагового двигателя с подвижными обмотками и неподвижным валом-магнитом, фиксатора вала второго шагового двигателя, лазерного дальномера, расположенного на фиксаторе вала второго шагового двигателя, устройства механической передачи крутящего момента с подвижного вала-магнита первого шагового двигателя на подвижные обмотки второго шагового двигателя, электронного устройства для сбора информации и управления, беспроводных каналов связи, внешнего устройства приема информации позволяет увеличить ресурс прибора за счет гальванической развязки шаговых двигателей и отсутствия передачи электрических сигналов через подвижные контакты, расширить угол обзора прибора до 360 градусов, увеличить надежность передачи данных от электронного устройства для сбора информации и управления и внешним устройством приема информации.
Зажим второго шагового двигателя обеспечивает его неподвижность, а также отвечает за устойчивую и стабильную работу устройства механической передачи крутящего момента с подвижного вала-магнита первого шагового двигателя на подвижные обмотки второго шагового двигателя.
Лазерный дальномер непрерывно вращается вторым шаговым двигателем в одном из направлений вокруг своей оси.
Лазерный дальномер содержит лазерный излучатель, световую матрицу, закрытую собирающей линзой, покрытой светофильтром, например интерференционным. Лазерный излучатель может работать в видимом диапазоне длин волн или инфракрасном диапазоне.
Лазерный дальномер имеет синхронизирующее устройство в виде щелевого датчика, работающего на просвет, с оптическим или магнитным принципом работы.
Заявляемое устройство также содержит стабилизатор и модуль обратной связи по положению и скорости, реализованные на интегральной плате. Стабилизатор позволяет выпрямлять напряжение с обмоток второго шагового двигателя.
Устройство механической передачи крутящего момента с подвижного вала-магнита первого шагового двигателя на подвижные обмотки второго шагового двигателя может представлять собой ременную, пасиковую или ленточную передачу.
Беспроводные каналы связи представляют множество каналов данных, работающих в ISM диапазоне (ISM - Industrial, Scientific, Medical), по которым передается информация по стандартам семейства 802.11, а именно Bluetooth LE (low energy), или Bluetooth, или ZigBee, или Wi-Fi и т.д.
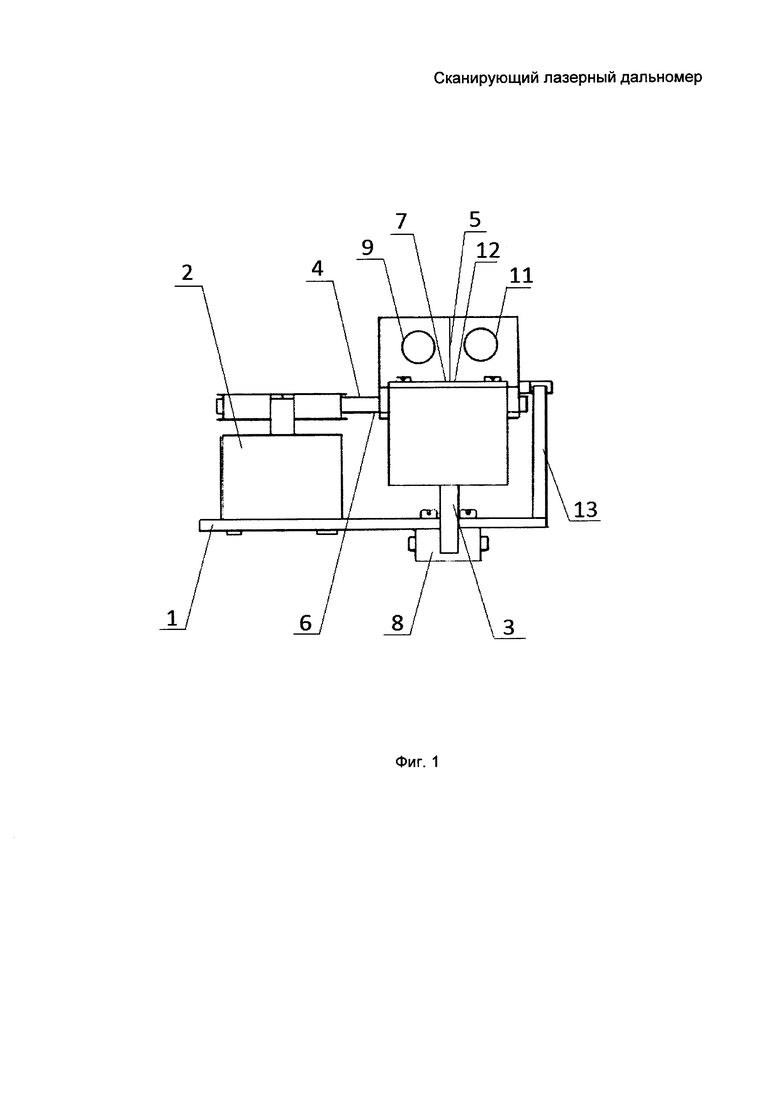
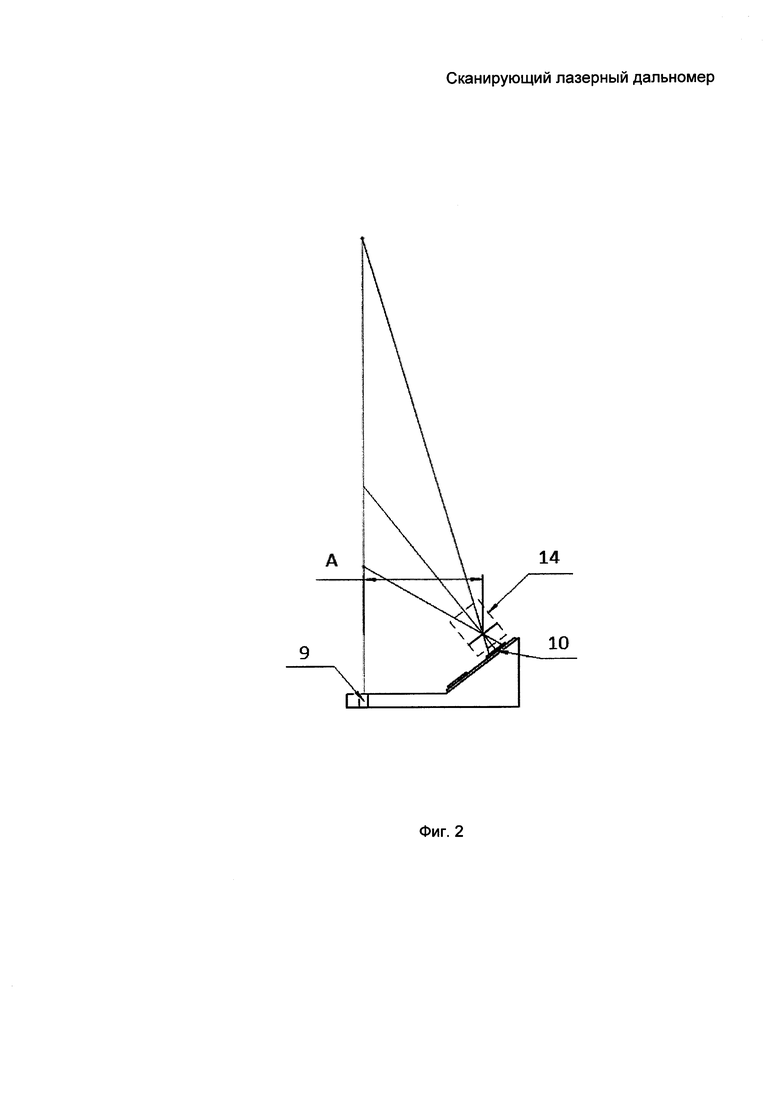
На фиг. 1 изображен сканирующий лазерный дальномер в конструктивном исполнении, на фиг 2. показана передача и прием луча лазера.
Сканирующий лазерный дальномер (фиг. 1) содержит основание 1, первый шаговый двигатель 2, выполненный с неподвижными обмотками и подвижным валом-магнитом, второй шаговый двигатель 3, выполненный с подвижными обмотками и неподвижным валом-магнитом, фиксатор вала 4 второго шагового двигателя 3, лазерный дальномер 5, расположенный на фиксаторе вала 4 второго шагового двигателя 3, устройство механической передачи крутящего момента 6 с подвижного вала-магнита первого шагового двигателя 2 на подвижные обмотки второго шагового двигателя 3, электронное устройство для сбора информации и управления 7, беспроводное устройство связи (не показано), внешнее устройство приема информации, например мобильный терминал (не показано). При этом второй шаговый двигатель 3 имеет зажим 8, обеспечивающий его неподвижность и стабильную работу устройства механической передачи крутящего момента 6 с подвижного вала-магнита первого шагового двигателя 2 на подвижные обмотки второго шагового двигателя 3, лазерный дальномер 5 содержит лазерный излучатель 9, световую матрицу 10, закрытую собирающей линзой (не показана), покрытой светофильтром 11. Устройство также содержит стабилизатор (не показан) и модуль обратной связи по положению и скорости в виде интегральной платы 12. Лазерный дальномер 5 имеет синхронизирующее устройство 13 в виде щелевого датчика.
Гальваническая развязка реализована в виде пары шаговых двигателей 2 и 3. Первый шаговый двигатель 2 выполнен с неподвижными обмотками и подвижным валом-магнитом, а второй шаговый двигатель 3 выполнен с подвижными обмотками и неподвижным валом-магнитом. Данная комбинация дает возможность выработки электромагнитной движущей силы для обмоток второго шагового двигателя 3, которые питают электронное устройство для сбора информации и управления 7 через стабилизатор и модуль обратной связи по скорости и положению в виде интегральной платы 12. Обратная связь по положению и скорости реализуется в виде физического принципа работы второго шагового двигателя 3 в инверсном режиме, представляющего из себя сигнал меандровой формы на выводах фаз обмоток второго шагового двигателя 3, длительность которых пропорциональна его скорости, а количество сигналов - углу его поворота. Неподвижность второго шагового двигателя 3 обеспечивается в использовании зажима, который также отвечает за устойчивую и стабильную работу устройства механической передачи крутящего момента 6 с подвижного вала-магнита первого шагового двигателя 2 на подвижные обмотки второго шагового двигателя 3, а именно - за натягивание механической передачи (ременной, пасиковой или ленточной).
Лазерный дальномер 5 является полностью откалиброванным. Он вращается непрерывно в одном из направлений вторым шаговым двигателем 3. Светофильтр 11 нужен для ослабления внешней засветки (от ламп и солнца). Наиболее подходящий фильтр при этом - интерференционный. Он пропускает узкий диапазон длин волн, который должен совпадать с длиной волны лазера. Остальное излучение светофильтр 11 отражает или поглощает и рассеивает внутри себя.
Лазерный излучатель 9 может работать либо в видимом диапазоне длин волн, либо в инфракрасном.
Принцип работы осевого лазерного дальномера 5 строится на следующем (приведен на фиг. 2). Излучение лазерного излучателя 9 отражается от объекта, попадает в объектив 14, который формирует изображение пятна лазерного луча на световой матрице 10. При перемещении объекта изменяется положение пятна на световой матрице 10 - высота отраженного сигнала. Дальность до измеряемой точки определяется по закону геометрической оптики по известным параметрам апертуры лазерного дальномера и высоты отраженного сигнала, измеренной с помощью световой матрицы 10 (с использованием значения базы А - расстояния между излучателем 9 и линзой, измеренное перпендикулярно лазерному лучу).
Общий принцип работы сканирующего дальномера заключается в следующем.
Скорость вращения сканирующего дальномера соответствует условию: одно измерение лазерного дальномера 5 в расчете на одно дискретное значение вращения второго шагового двигателя 3. В качестве сигнала тактирования используют выпрямленный сигнал с фаз обмоток второго шагового двигателя 3. Таким образом, достигают постоянства измерений на оборот и максимальной информационной эффективности работы прибора.
На каждом дискретном значении движения лазерный дальномер 5 выдает расстояние до измеряемой точки. Данное расстояние сохраняют в памяти заявляемого устройства в виде пары чисел, состоящих из показания дальности до объекта измерения и показания угла поворота лазерного дальномера 5. В конце оборота второго шагового двигателя 3 происходит обнуление позиции при поступлении сигнала от синхронизирующего устройства 13, реализованного в виде щелевого датчика, работающего на просвет, при этом может быть использован как оптический принцип работы такого датчика, так и магнитный.
Запуск сканирующего лазерного дальномера происходит следующим образом.
1. Подают сигнал управления к старту на обмотки первого шагового двигателя 2, приводят его во вращение и создают механический момент на его подвижном валу-магните.
2. Передают полученный механический момент на подвижный корпус второго шагового двигателя 3 и приводят его во вращение относительно его неподвижного вала-магнита.
3. Генерируют напряжение на обмотках второго шагового двигателя 3, которое приводит к созданию ЭДС в его обмотках, соединенных с проводами на подвижном корпусе, которые питают электронное устройство для сбора информации и управления 7, а также лазерный дальномер 5, в результате запускается цикл его работы.
Цикл работы лазерного дальномера 5 представляется следующим образом:
1. Ожидают приход сигнала обратной связи, выраженного в виде смены фазы питающего напряжения в результате поворота подвижного корпуса второго шагового двигателя 3 на угол, соответствующий очередному положению зубца указанного двигателя 3;
2. После получения сигнала синхронизации рассчитывают новое угловое положение оптической системы лазерного дальномера 5, результат измеренного угла сохраняют в память, расположенную в электронном устройстве для сбора информации и управления 7;
3. Производят считывание показаний со световой матрицы 10 и расчет дальности до точки измерения, данное значение преобразуют в расстояние и добавляют в виде соответствия углу, рассчитанному на предыдущем этапе измерения. В результате получают пару чисел в виде угла и расстояния до препятствия, соответствующего этому углу;
4. Действия по предыдущему пункту выполняют до тех пор, пока лазерный дальномер 5 не совершит оборот на весь измеряемый угол (в данном изобретении - 360 градусов, но может быть и любой другой угол);
5. После этого данные в памяти устройства, содержащие пары чисел расстояний и углов, обновляют в виде набора значений на протяжении всего измерения угла перемещения лазерного дальномера 5;
6. Полученные новые данные копируются в буфер, расположенный в электронном устройстве для сбора информации и управления 7 и отвечающий за передачу данных по каналу беспроводной связи.
Также допускается режим работы в виде выдачи относительных углов поворота и расстояний, соответствующих очередному углу поворота. В данном случае в буфер, отвечающий за передачу данных по каналу беспроводной связи, копируется пара чисел в виде угла относительного поворота, выраженного путем вычитания текущего угла поворота, и угла поворота, соответствующего предыдущему считыванию данной пары чисел по каналу беспроводной связи.
Наличие основания с установленными на нем гальванически развязанными шаговыми двигателями, устройства передачи крутящего момента с одного шагового двигателя на другой, фиксатора вала с установленным на нем лазерным дальномером, системы передачи и приема данных позволяет повысить точность определения положения до объекта и обеспечить обзор устройства до 360 градусов.
Использование физических особенностей гальванической развязки в виде второго шагового двигателя, представляющего собой синхронный бесщеточный электродвигатель с одной или несколькими обмотками, работающий в инверсном (генераторном) режиме, позволяет повысить надежность обратной связи по положению и скорости.
Наличие беспроводного канала данных для передачи и приема информации между электронным устройством для сбора информации и управления и внешним устройством приема информации позволяет повысить надежность и точность передачи информации, а также обеспечить эффективное управление заявляемым устройством.
Выполнение первого шагового двигателя с неподвижными обмотками и подвижным валом-магнитом, а второго шагового двигателя с подвижными обмотками и неподвижным валом-магнитом позволяет увеличить ресурс заявляемого устройства за счет отсутствия передачи электрических сигналов через подвижные контакты.
Полная гальваническая развязка управляющей электроники, реализованная при использовании устройства механической передачи крутящего момента с подвижного вала-магнита первого шагового двигателя на подвижные обмотки второго шагового двигателя, работающего в генераторном режиме (вращающийся трансформатор), позволяет повысить уровень защиты заявляемого устройства от помех питающего напряжения.
Таким образом, предлагаемое изобретение позволяет расширить угол обзора заявляемого устройства до 360 градусов, практически исключить выход из строя лазерного дальномера за счет износа контактов, передающих электрические сигналы питания, увеличить срок службы заявляемого устройства, увеличить надежность канала передачи данных вследствие отсутствия подвижного контакта, улучшить стабильность параметров скорости и числа измерений на оборот лазерного дальномера.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ ПОДВИЖНЫЙ СТАНОК | 2020 |
|
RU2752349C1 |
| Система управления процессом бурения при установке винтовых свай | 2018 |
|
RU2702305C2 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| Мобильный сканер для определения качества поверхности сварного шва | 2016 |
|
RU2644617C2 |
| СИСТЕМА, УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ ВНУТРЕННЕЙ ОГНЕУПОРНОЙ ФУТЕРОВКИ СОСУДА | 2020 |
|
RU2810030C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2396573C2 |
| УСТАНОВКА ДЛЯ БУРОВОГО ЗОНДИРОВАНИЯ | 2012 |
|
RU2541977C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2000 |
|
RU2187137C2 |
| ОПТИЧЕСКИЙ ЛОКАТОР КРУГОВОГО ОБЗОРА | 2007 |
|
RU2352957C2 |
| БИНАРНЫЙ КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ПОИСКА И СБОРА ВНЕЗЕМНЫХ НАНООБЪЕКТОВ С МАГНИТНЫМИ СВОЙСТВАМИ В ОКРЕСТНОСТЯХ ТОЧЕК ЛИБРАЦИИ | 2021 |
|
RU2761686C1 |
Изобретение относится к области робототехники, в частности к оптико-электронным приборам, предназначенным для построения карты местности, измерения расстояния от точки установки прибора до точки пересечения измерительного луча прибора с препятствием. Заявленный сканирующий лазерный дальномер содержит основание, первый шаговый двигатель, выполненный с неподвижными обмотками и подвижным валом-магнитом, второй шаговый двигатель, выполненный с подвижными обмотками и неподвижным валом-магнитом, фиксатор вала второго шагового двигателя, зажим второго шагового двигателя, лазерный дальномер, расположенный на фиксаторе вала второго шагового двигателя. Также дальномер содержит устройство механической передачи крутящего момента с подвижного вала-магнита первого шагового двигателя на подвижные обмотки второго шагового двигателя, электронное устройство для сбора информации и управления, беспроводные каналы связи, внешнее устройство приема информации. Технический результат - расширение угла обзора устройства до 360 градусов и увеличение его ресурса. 7 з.п. ф-лы, 2 ил.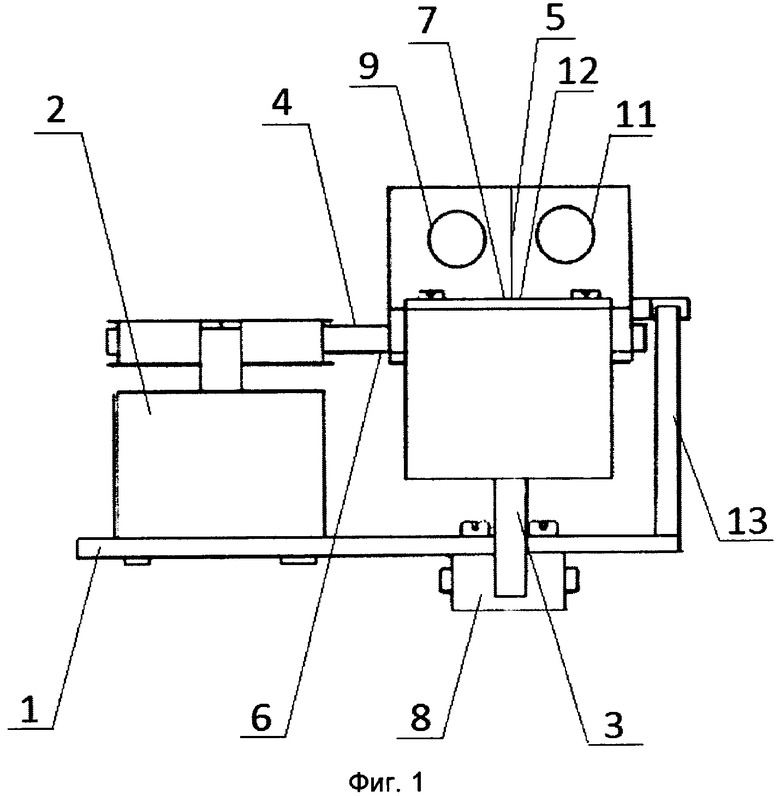
1. Сканирующий лазерный дальномер, характеризующийся тем, что содержит основание, первый шаговый двигатель, выполненный с неподвижными обмотками и подвижным валом-магнитом, второй шаговый двигатель, выполненный с подвижными обмотками и неподвижным валом-магнитом, фиксатор вала второго шагового двигателя, зажим второго шагового двигателя, лазерный дальномер, расположенный на фиксаторе вала второго шагового двигателя, устройство механической передачи крутящего момента с подвижного вала-магнита первого шагового двигателя на подвижные обмотки второго шагового двигателя, электронное устройство для сбора информации и управления, беспроводные каналы связи, внешнее устройство приема информации.
2. Сканирующий лазерный дальномер по п. 1, характеризующийся тем, что лазерный дальномер непрерывно вращается вторым шаговым двигателем в одном из направлений вокруг своей оси.
3. Сканирующий лазерный дальномер по п. 1, характеризующийся тем, что лазерный дальномер содержит лазерный излучатель, световую матрицу, закрытую собирающей линзой, покрытой светофильтром.
4. Сканирующий лазерный дальномер по п. 3, характеризующийся тем, что лазерный излучатель работает в видимом диапазоне длин волн или инфракрасном диапазоне длин волн.
5. Сканирующий лазерный дальномер по п. 4, характеризующийся тем, что лазерный дальномер имеет синхронизирующее устройство в виде щелевого датчика с оптическим или магнитным принципом работы.
6. Сканирующий лазерный дальномер по п. 4, характеризующийся тем, что устройство также содержит стабилизатор и модуль обратной связи по положению и скорости в виде интегральной платы.
7. Сканирующий лазерный дальномер по п. 4, характеризующийся тем, что устройство механической передачи крутящего момента с подвижного вала-магнита первого шагового двигателя на подвижные обмотки второго шагового двигателя представляет собой ременную, пасиковую или ленточную передачу.
8. Сканирующий лазерный дальномер по п. 4, характеризующийся тем, что беспроводные каналы связи представляют собой каналы Bluetooth LE, или Bluetooth, или ZigBee, или Wi-Fi.
| Устройство для измельчения различных материалов | 1960 |
|
SU133329A1 |
| ЛАЗЕРНЫЙ ПРИЦЕЛ-ДАЛЬНОМЕР (ВАРИАНТЫ) | 2006 |
|
RU2348889C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ ДВУМЯ ОБЪЕКТАМИ | 1995 |
|
RU2116621C1 |
| US 7176443 B2, 13.08.2007. | |||

