Изобретение относится к области судостроения, в частности к устройствам (способам) определения посадки судна, и может быть использовано для оценки текущих и прогнозируемых характеристик непотопляемости (запаса плавучести и остойчивости) аварийного судна на основании непрерывного определения положения судна относительно поверхности воды (посадки).
Предпосылки к изобретению
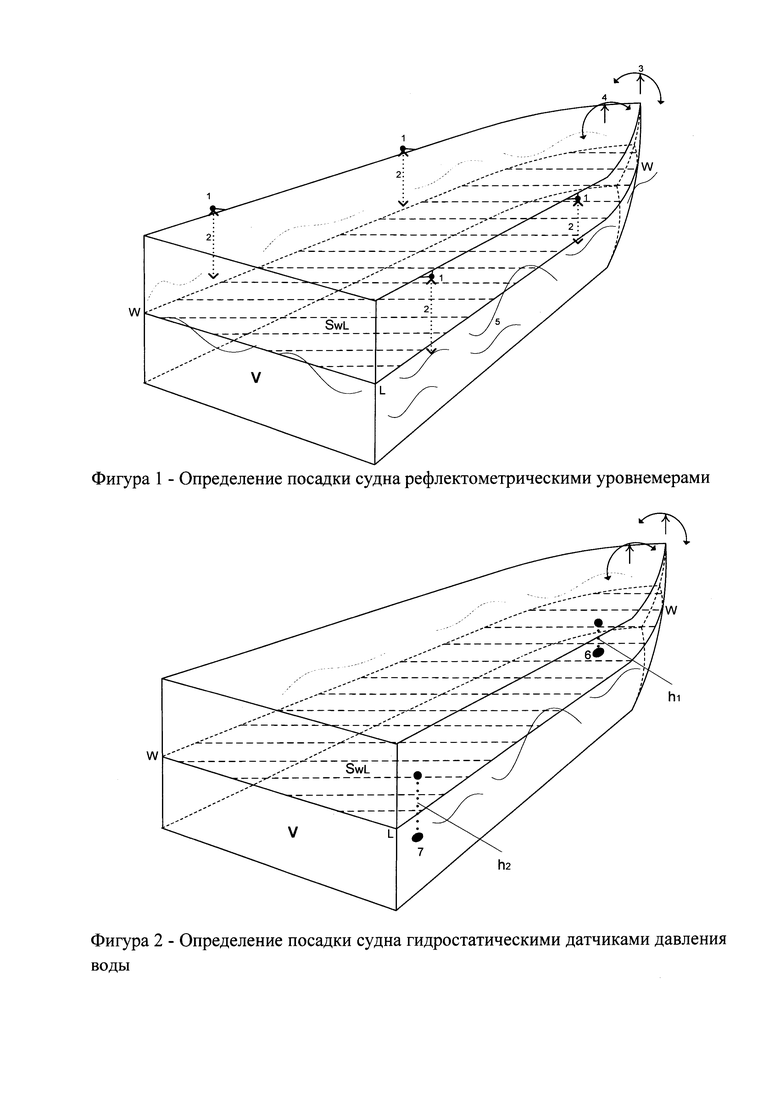
Для непрерывного автоматического определения посадки судна используют рефлектометрические уровнемеры, установленные побортно на надводной части корпуса судна, в местах, позволяющих посылать сигнал к воде и принимать его отражение от поверхности воды, благодаря чему измерять расстояние между уровнемером и водой (поясняется фигурой 1) и тем самым определять посадку судна.
На фиг. 1 приняты следующие обозначения:
1 - рефлектометрические уровнемеры (излучатель-приемник), установленные стационарно, неподвижно на корпусе судна, попарно с каждого борта;
2 - прямой и обратный (отраженный от поверхности воды) сигналы;
3 - качание судна по крену;
4 - качание судна по дифференту;
5 - профиль волны;
WL - ватерлиния;
SWL - площадь ватерлинии (заштрихована);
V - объем подводной части судна.
На точность измерения расстояния от уровнемера до поверхности воды, согласно законам физики, оказывают влияние следующие факторы:
- Значение угла между поверхностью воды и направлением распространения сигнала, посылаемого от уровнемера. Чем ближе это значение к прямому углу, тем точнее получают результат измерения;
- Состояние поверхности воды и волнение моря, влияющие на значение угла между поверхностью воды и направлением распространения сигнала, посылаемого от уровнемера;
- Углы крена и дифферента судна, влияющие на направление распространения сигнала, посылаемого от уровнемера к поверхности воды;
- Расстояние между уровнемером и поверхностью воды;
- Параметры воды, в том числе ее прозрачность и плотность.
Дополнительно следует отметить, что «надводное» размещение уровнемеров по периметру горизонтальной проекции судна повышает вероятность их выхода из строя в результате боевых и аварийных повреждений; при заливании палубы водой (на большом волнении) уровнемеры окажутся погруженными в воду, не позволяющими им осуществлять измерения; при прекращении электропитания аппаратуры контроля посадки судна от судовой сети и переходе на автономное питание от аккумуляторов на повышение интенсивности их разряда будет влиять активный характер работы рефлектометрических уровнемеров, связанных с генерированием и излучением измерительного сигнала.
Данные обстоятельства требуют разработки простого в реализации технического решения, обеспечивающего минимизацию проявления приведенных выше негативных факторов и особенностей.
Известно «Определение посадки судна - Марки углубления» [1], согласно которому контроль за посадкой судна осуществляют по маркам осадок (маркам углубления), нанесенных на форштевне, в районе мидель-шпангоута и на ахтерштевне и углов крена и дифферента.
Применение способа [1] для определения посадки аварийного судна окажется сложным вследствие того, что непрерывное наблюдение за марками углубления осложняется аварийным состоянием судна (пожаром, задымлением, погружением судна в воду с креном и дифферентом), штормовыми условиями, ухудшенной видимостью, применением по судну оружия противника. Кроме того, зрительное считывание значений углубления по маркам (шкалам) снижает точность измерений.
Применение устройства [2] для определения посадки аварийного судна ограничено по своим возможностям, вследствие использования электрических датчиков уровня погружения, установленных в двух шпангоутных сечениях судна, дающих на выходе сигнал, пропорциональный длине смоченной части периметра сечения, вследствие чего на точность их работы окажет заметное влияние качка судна. Кроме того, для данного устройства характерна сложность аппаратуры и сравнительно большой ее количественный состав.
Наиболее близким к предлагаемому изобретению по своей технической сущности является автоматизированная система контроля посадки судна (АСК) [3], обеспечивающая контроль параметров посадки судна посредством корабельных рефлектометрических уровнемеров, входящих в состав АСК вместе с соответствующими электронными (электрическими) блоками.
Применение системы [3] для определения посадки аварийного судна сопряжено, как это было указано выше (абзац «предпосылки к изобретению»), проявлением ряда негативных факторов и особенностей, ограничивающих использование данной АСК по замыслу заявляемого изобретения.
Техническим результатом предлагаемого изобретения является повышение точности определения посадки судна за счет применения датчиков получения первичных данных, расположенных под водой, в меньшей степени подверженных влиянию негативных факторов, характерных для датчиков рефлектометрического принципа работы, расположенных над водой, повышение надежности работы аппаратуры за счет упрощения принципа действия, уменьшения количественного состава и сложности аппаратуры, увеличение продолжительности функционирования аппаратуры за счет автономного электропитания и энергосберегающего принципа работы, непрерывная трансляция данных о посадке аварийного судна на внешние объекты, оказывающие помощь судну.
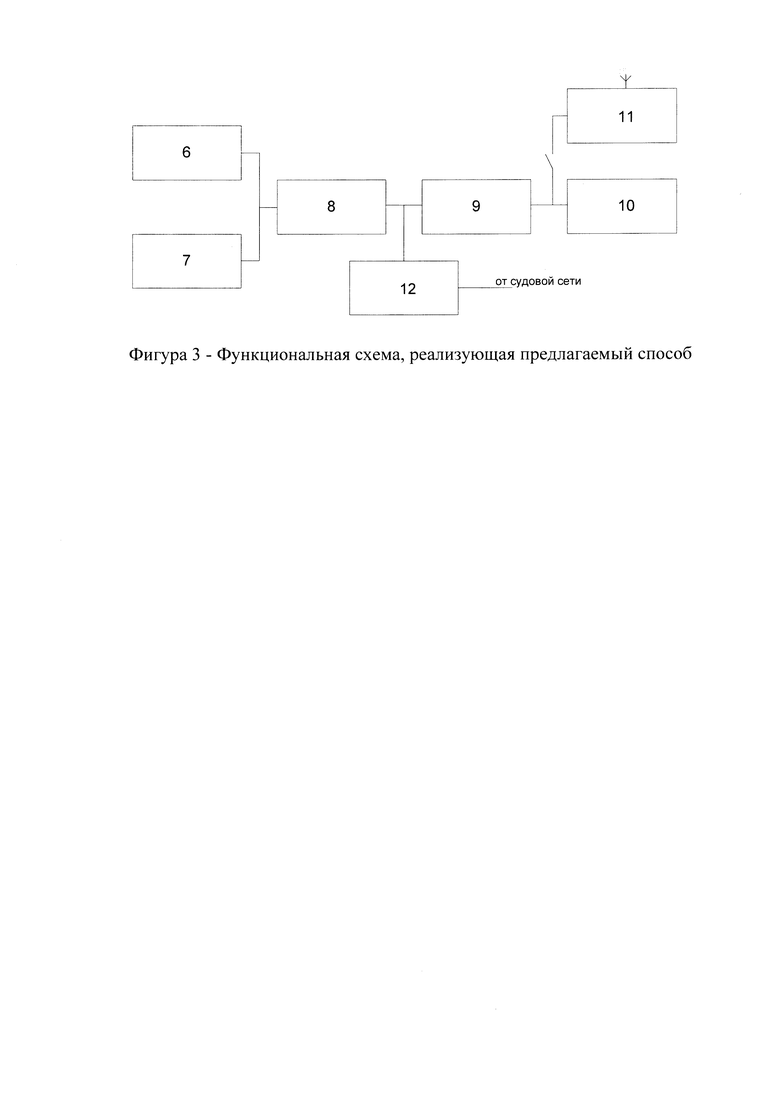
На фиг. 2 представлен рисунок, показывающий реализацию заявленного способа, со следующими обозначениями:
6 - малогабаритный гидростатический датчик давления воды, установленный в днище судна, в носовой части, максимально приближенным к диаметральной плоскости судна;
7 - малогабаритный гидростатический датчик давления воды, установленный в днище судна, в кормовой части, между диаметральной плоскостью и одним из бортов судна. Согласно законам физики, чем больше расстояние от поверхности воды до датчиков, тем меньше влияние волнения моря на результаты их измерения;
h1, h2 - расстояния (прямые отрезки на рисунке) от гидростатических датчиков давления по перпендикулярному направлению до спокойной поверхности воды.
По гидростатическому давлению воды, измеренному датчиком, установленным в днище судна, судят о расстоянии от датчика до поверхности воды. Направления величин (прямых h1, h2), согласно законам физики, всегда перпендикулярны к спокойной поверхности воды.
Величины h1, h2 являются интегральными величинами, учитывающими качание судна (бортовую, килевую, вертикальную качки), его осадку, состояние поверхности воды и волнение моря. Мгновенные значения указанных величин определяют мгновенные положения судна относительно поверхности воды, приводимые к осредненному положению судна за промежуток времени для спокойной поверхности воды для данных мгновенных положений судна.
Согласно теории корабля посадку судна оценивают по параметрам крена, дифферента и осадки, находящимся в функциональной зависимости от величин hi, h2, оказывающимся достаточными для определения посадки судна.
В качестве исходных величин h1, h2 используют их значения для посадки судна, находящегося на спокойной воде, без крена и дифферента с осадкой, соответствующей одному из типовых водоизмещений судна, принятому за исходное водоизмещение. Для данного водоизмещения, изменяя углы крена и дифферента, моделируют возможные варианты посадки судна и фиксируют соответствующие значения h1, h2. Через определенный шаг принимается следующее значение водоизмещения и для этого водоизмещения, изменяя углы крена и дифферента, моделируют возможные варианты посадки судна и фиксируют соответствующие значения h1, h2 Последующие действия выполняют подобно предыдущим до полного формирования необходимого объема массива исходных значений h1, h2, охватывающих все возможные варианты посадки судна, включая аварийные.
На фиг. 3 показана функциональная схема, реализующая предлагаемый способ со следующими обозначениями:
6 - гидростатический датчик давления воды, установленный в днище судна, в носовой части;
7 - гидростатический датчик давления воды, установленный в днище судна, в кормовой части;
8 - аналого-цифровой преобразователь;
9 - анализирующее устройство;
10 - монитор отображения информации;
11 - транслятор для транслирования сигналов, несущих информацию о посадке аварийного судна внешним объектам, принимающим участие в оказании помощи этому судну;
12 - блок питания.
Способ осуществляют следующим образом.
Гидростатические датчики давления воды (6), (7), установленные в днище судна, непрерывно измеряют гидростатическое давление воды, пропорциональное расстоянию от них до поверхности воды. Аналоговые сигналы указанных датчиков преобразуются в цифровые сигналы в блоке (8) и в дальнейшем поступают в блок (9) анализирующего устройства, которое определяет текущую и прогнозируемую посадки судна, на основании массива исходных значений h1, h2, а также соответствующие им параметры площади ватерлинии и объема подводной части корпуса судна, параметры и характеристики непотопляемости судна. Указанная информация отображается на мониторе (10). При необходимости эта информация передается транслятором (11) внешним объектам, принимающим участие в оказании помощи аварийному судну. При прекращении подачи электропитания на схему от судовой сети блок питания (12) осуществляет электропитание схемы посредством аккумуляторов, установленных в данном блоке.
Источники информации
1. Теоретический чертеж и координатные плоскости оси Определение посадки судна - Марки углубления. URL: https://sea-man.org
2. SU 1452745 А1, 1989.01.23. Устройство для определения посадки судна. URL: https://yandex.ru/patents
3. Каталог. Автоматизированная система контроля посадки судна (АСК). URL: http://agat-kip.ru
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 2013 |
|
RU2518374C1 |
| Способ текущего контроля остойчивости судна | 2024 |
|
RU2829030C1 |
| МОРСКОЙ СПАСАТЕЛЬ - НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ СУДНО | 2015 |
|
RU2603818C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 1991 |
|
RU2016812C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КРЕНОВАНИЯ СУДНА | 2012 |
|
RU2522671C1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПОСАДКИ АВАРИЙНОГО ПОДВОДНОГО ОБЪЕКТА В НАДВОДНОМ ПОЛОЖЕНИИ В УСЛОВИЯХ КАЧКИ | 1997 |
|
RU2116929C1 |
| Маневрирующий спасательный колокол | 2022 |
|
RU2783319C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОСАДКИ СУДНА | 2018 |
|
RU2680944C1 |
Изобретение относится к области судостроения, в частности к способу определения посадки судна, и может быть использовано для оценки текущих и прогнозируемых характеристик непотопляемости. Для определения посадки судна непрерывно автоматически выполняют контроль параметров посадки судна. Используют гидростатический датчик давления воды, установленный в днище судна, в носовой части, максимально приближенным к диаметральной плоскости судна. Используют другой гидростатический датчик давления воды, установленный в днище судна, в кормовой части, между диаметральной плоскостью и одним из бортов судна. Датчиками измеряют непрерывно гидростатическое давление воды, пропорциональное расстояниям от них до поверхности воды, учитывающими качание судна, его осадку, состояние поверхности воды и волнение моря. По массиву исходных значений указанных расстояний и текущих измеренных значений этих расстояний определяют текущую и прогнозируемую посадки судна и определяют параметры и характеристики непотопляемости судна. При отсутствии электропитания аппаратуры контроля параметров посадки судна от судовой сети осуществляют переход на автономное энергосберегающее электропитание благодаря малому расходу электроэнергии гидростатическими датчиками давления воды и непрерывно транслируют данные о посадке аварийного судна на внешние объекты, оказывающие помощь судну. Достигается повышение точности определения посадки судна, повышение надежности работы аппаратуры за счет упрощения принципа действия и непрерывная трансляция данных о посадке аварийного судна на внешние объекты. 3 ил.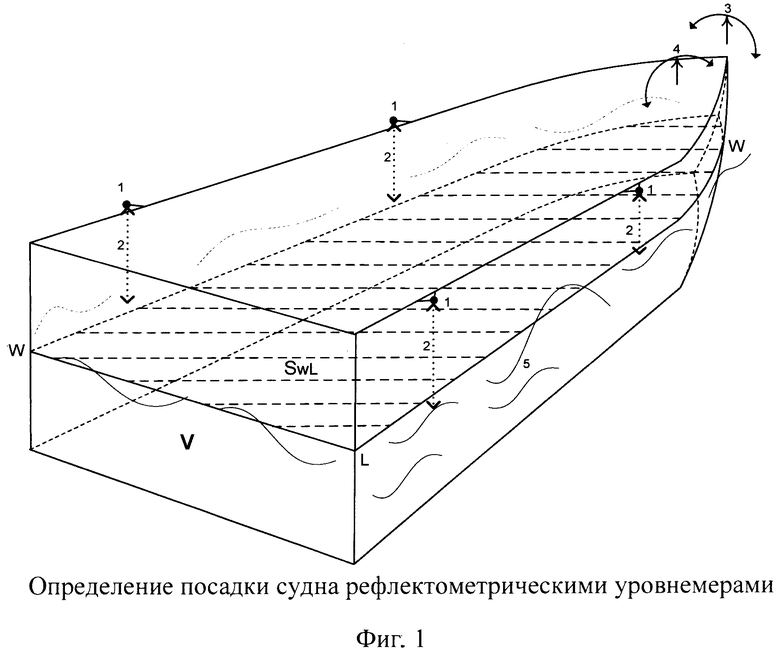
Способ определения посадки судна, заключающийся в том, что непрерывно автоматически выполняют контроль параметров посадки судна, отличающийся тем, что используют гидростатический датчик давления воды, установленный в днище судна, в носовой части, максимально приближенным к диаметральной плоскости судна, используют другой гидростатический датчик давления воды, установленный в днище судна, в кормовой части, между диаметральной плоскостью и одним из бортов судна, указанными датчиками измеряют непрерывно гидростатическое давление воды, пропорциональное расстояниям от них до поверхности воды, учитывающими качание судна, его осадку, состояние поверхности воды и волнение моря, по массиву исходных значений указанных расстояний и текущих измеренных значений этих расстояний определяют текущую и прогнозируемую посадки судна, определяют параметры и характеристики непотопляемости судна, при отсутствии электропитания аппаратуры контроля параметров посадки судна от судовой сети осуществляют переход на автономное энергосберегающее электропитание благодаря малому расходу электроэнергии гидростатическими датчиками давления воды, непрерывно транслируют данные о посадке аварийного судна на внешние объекты, оказывающие помощь судну.
| Устройство для определения посадки судна | 1987 |
|
SU1452745A1 |
| СПОСОБ ТЕКУЩЕГО КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2021 |
|
RU2767563C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2019 |
|
RU2740617C1 |
| US 20030019413 A1, 30.01.2003 | |||
| US 4918628 A1, 17.04.1990. | |||

