Изобретение относится к судостроению, а именно к способам контроля мореходных качеств аварийных судов, и может быть использовано при создании интеллектуальных систем мониторинга безопасности мореплавания.
Цель изобретения - повышение безопасности плавания судна путем повышения достоверности оценки мореходных качеств аварийного судна.
Наиболее близким техническим решением оперативного контроля непотопляемости в условиях эксплуатации является «Способ контроля непотопляемости судна» по патенту РФ №2016812 от 30.07.94. Этот патент использован в качестве прототипа.
Известен способ контроля непотопляемости, заключающийся в измерении периода бортовой качки, амплитуд угловых перемещений и ускорений судна относительно продольной и поперечной его центральных осей, осадок носом и кормой, курсового угла и скорости судна в условиях волнения и определении расчетом метацентрической высоты.
Недостатком этого способа является отсутствие датчиков, обеспечивающих контроль линейных перемещений и ускорений относительно вертикальной центральной оси и влившейся в затопленные отсеки воды, а также адаптивных свойств алгоритма, обеспечивающего идентификацию ситуации и настройку параметров моделей преобразования информации в процессе затопления отсеков.
Технический результат достигается тем, что дополнительно измеряют линейные перемещения и ускорения судна относительной вертикальной центральной оси и уровни жидкости в затопленных отсеках, устанавливают случай затопления и параметры равновесной посадки, вырабатывают практические рекомендации по проведению мероприятий по поддержанию плавучести и остойчивости аварийного судна.
На фиг.1 представлена обобщенная структурная схема устройства, реализующая предлагаемый способ.
Устройство содержит измерительный блок 1, включающий датчики угловых перемещений 2 и ускорений 3 судна относительно продольной и поперечной его центральных осей, датчики линейных перемещений 4 и 5, определяющие осадки судна носом и кормой, датчик «кажущегося» периода бортовой качки судна 6, датчик курсового угла волны 7, датчик скорости судна 8, датчик линейных перемещений и ускорений судна относительно вертикальной оси 9, датчики уровней жидкости 10 в затопленных отсеках h1-hN, сигналы от которых поступают на средство обеспечения совместимости 11, состоящее из блока нормирования и коммутации сигналов 12 управляющего процессора АЦП 13 и интерфейса 14, осуществляющих преобразование и фильтрацию исходной информации и ввод ее в ЭВМ 15 с периферийным оборудованием, включающим накопитель на магнитном диске, цветной графический дисплей 16 и печатающее устройство 17, позволяющее реализовать разработанный алгоритм обработки данных измерений и отобразить результаты в виде, удобном для восприятия судоводителем.
Способ контроля непотопляемостиоси судна осуществляют следующим образом.
Измеряют угловые и линейные перемещения θ,Ψ и ускорения θ",Ψ" судна относительно продольной и поперечной его центральных осей, осадки судна носом ТН и кормой ТК, «кажущийся» период волны τK, курсовой угол волны φK и скорость судна на нерегулярном волнении V, дополнительно измеряют линейные перемещения Т и ускорения Т" судна относительно вертикальной оси и уровни жидкости в затопленных отсеках h1-hN.
При построении алгоритма контроля непотопляемости использованы данные работы:
Нечаев Ю.И., Анищенко О.П., Кирюхин И.А. Интеллектуальная система контроля непотопляемости судна // Системы искусственного интеллекта в интеллектуальных технологиях XXI века. - Санкт-Петербург: Арт-Экспресс, 2011, с.83-98.
По данным измерений устанавливают:
1. Информационный вектор, представляющий результаты измерений

и позволяющий получить фактические значения водоизмещения D судна, метацентрическую высоту h0 и аппликату центра масс ZG



где C=f(D) - инерционный коэффициент; B - ширина судна, м; (τ0)W - средний период крупных колебаний при бортовой качке, с; Zm - аппликата метацентра, м.
3. Случай затопления S - путем обработки сигналов от датчиков уровней жидкости в затопленных отсеках h1, …, hN и текущих значений углов крена и дифферента θ(t) и Ψ(t).

4. Выборку данных измерений и «скользящее окно» угловых и линейных перемещений и ускорений судна относительно его продольной, поперечной и вертикальной центральных осей в процессе выполнения трех шагов обработки измерительной информации: на первом шаге обработка ведется в течение 2 минут, на втором - 4 минут, на третьем 6 минут, а далее формируется «скользящее окно», длительностью 6 минут.

где J(X) - информационный вектор (1), определяющий поток измерительной информации после инициализации алгоритма; J1(X), …, J3(X) - поток информации на первом - третьем шагах работы алгоритма; W1(X), …, WN(X) - поток информации при движении «скользящего окна».
5. Функцию 

на основе которой выполняют оценку особенностей режимов качки в соответствии со следующей структурой:

линейная модель - Linear(Pr):
нелинейная модель - Nonlinear(Pr):
показывающей, что при линейном характере колебаний (9) равновесное и среднее значения колебательного процесса оказываются близкими в пределах допустимой погрешности алгоритма, работа которого завершается оценкой текущей погрешности обработки информации и выдачей результатов анализа на выход системы контроля. При выполнении условия (10) алгоритм продолжает работу в рамках нелинейной интерпретации данных динамических измерений.
В приведенных формулах (7)-(10) Xo - равновесное значение параметра посадки; X* - среднее значение процесса колебательного движения судна относительно продольной, поперечной и вертикальной центральных осей; F1(Xm) - функция идентификации, учитывающая особенности динамики аварийного судна в процессе «настройки» модели взаимодействия; Xm - средний размах;


6. Параметры адаптивной модели, обеспечивающей идентификацию алгоритма в рамках «скользящего окна» применительно к конкретному судну на основе регрессионной зависимости

коэффициенты A и В которой «настраиваются» на основе данных измерений бортовой, килевой и вертикальной качки.
7. Параметры равновесной посадки аварийного судна в соответствии с физическими закономерностями исследуемых процессов:

где θ0, Ψ0, Т0 - параметры равновесной посадки (крен, дифферент, осадка); W(t) - «скользящее окно», в пределах которого вычислены значения θ0, Ψ0, Т0; t - интервал времени формирования «скользящего окна».
8. Аварийную метацентрическую высоту на основе данных измерений уровней жидкости в затопленных отсеках h1-hN

где h0 - метацентрическая высота, определенная по формуле (3); Δh - изменение метацентрической высоты, вызванное непрерывным затоплением отсеков поврежденного судна.
9. Оценку аварийной остойчивости судна путем сопоставления величины текущей метацентрической высоты h(t) с критическим значением hCR, определенным по Правилам Морского Регистра Судоходства

где h(t) и hCR=f(D) - текущее и предельно допустимое для данного судна значения метацентрической высоты.
10. Предельные значения параметров равновесной посадки θt *, Ψt *, Tt *, заданные исходя из требований обеспечения плавучести и остойчивости аварийного судна, и интервал времени τ=τmin, в пределах которого обеспечиваются условия безопасности:

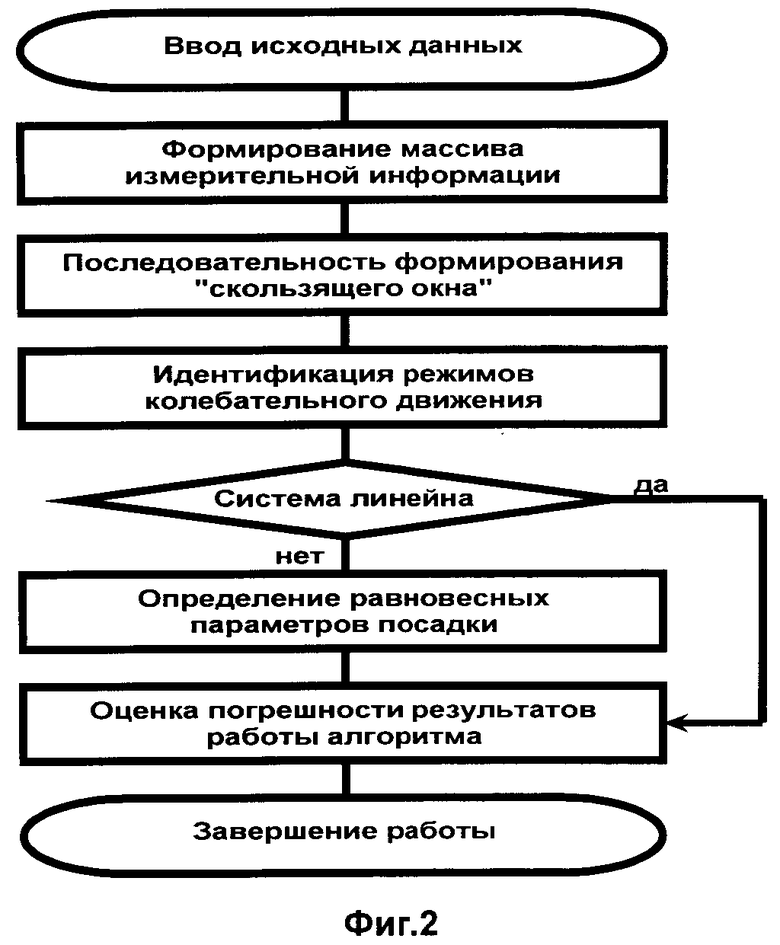
На основе соотношений (1)-(15) реализуются процедуры преобразования информации в рамках алгоритма контроля параметров равновесной посадки, представленного в виде блок-схемы (фиг.2).
Операции по обработке данных динамических измерений выполняются в вычислительном блоке с помощью бортового вычислительного комплекса 15. Полученные данные заносят на внешнюю память, выводят на дисплей 16 и документируют с помощью принтера 17.
Устройство, реализующее способ контроля непотопляемости судна, работает следующим образом.
С помощью датчиков, размещенных в блоке 1, производят измерения угловых перемещений 2 и ускорений 3 судна относительно продольной и поперечной его центральных осей, осадок судна носом 4 и кормой 5, «кажущегося» периода волны 6, курсового угла волны 7 и скорости судна на нерегулярном волнении 8, дополнительно измеряют перемещения и ускорения относительно вертикальной центральной оси 9 и уровни жидкости в затопленных отсеках 10, сигналы от которых поступают на средство обеспечения совместимости 11, состоящее из блока нормирования и коммутации сигналов 12 управляющего процессора АЦП 13 и интерфейса 14, осуществляющих преобразование и фильтрацию исходной информации и ввод ее в ЭВМ 15 с периферийным оборудованием, включающим накопитель на магнитном диске, цветной графический дисплей 16 и печатающее устройство 17, позволяющее реализовать разработанный алгоритм обработки данных измерений и отобразить результаты в виде, удобном для восприятия судоводителем.
Результаты работы алгоритма, реализующего способ контроля непотопляемости, используют в бортовой интеллектуальной системе обеспечения безопасности мореплавания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 1991 |
|
RU2016812C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1994 |
|
RU2091269C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА НА РАЗРУШАЮЩЕМСЯ ВОЛНЕНИИ | 2011 |
|
RU2455190C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1998 |
|
RU2147540C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ КАЧКИ СУДНА ПРИ КОНТРОЛЕ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В МОРСКИХ УСЛОВИЯХ | 2014 |
|
RU2571389C2 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1989 |
|
RU2033369C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ И СКОРОСТИ СУДНА | 1992 |
|
RU2057678C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1990 |
|
RU2033370C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1991 |
|
RU2040429C1 |
Изобретение относится к области судостроения. Способ контроля непотопляемости судна заключается в том, что в измерительном блоке (1) осуществляют измерения угловых перемещений 2 и ускорений (3) судна относительно продольной и поперечной центральных осей, линейных перемещений (4) и (5), определяющих осадки судна носом и кормой, «кажущегося» периода бортовой качки судна (6), курсового угла волны (7), скорости судна (8), линейных перемещений и ускорений (9) относительно вертикальной центральной оси, уровней жидкости в затопленных отсеках (10). На основе измерений формируют информационный вектор измерений, определяют случай затопления, выделяют «скользящее окно», устанавливают режимы качки, определяют равновесные параметры посадки аварийного судна, выделяют предельно допустимые значения параметров посадки, производят оценку состояния аварийного судна и аварийной остойчивости, осуществляют мероприятия по спрямлению судна и восстановлению остойчивости. Повышается безопасность мореплавания. 2 ил.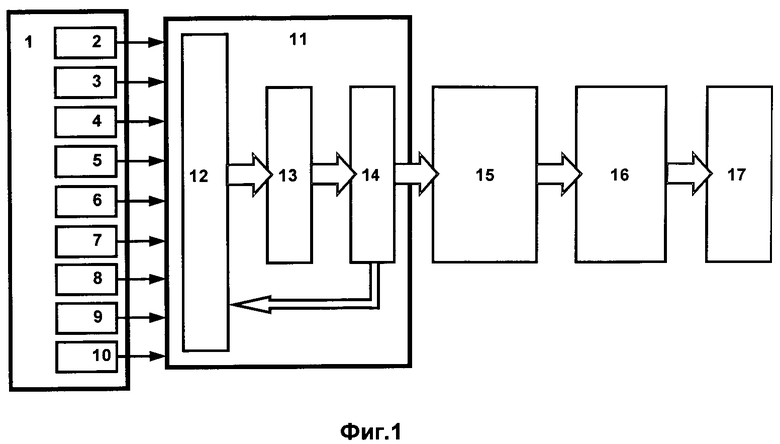
Способ контроля непотопляемости судна, заключающийся в измерении периода бортовой качки, амплитуд угловых перемещений и ускорений судна относительно продольной и поперечной его центральных осей, осадок носом и кормой, курсового угла и скорости судна в условиях волнения и определении расчетом метацентрической высоты, отличающийся тем, что дополнительно измеряют амплитуды линейных перемещений и ускорений судна относительно вертикальной центральной оси и уровни жидкости в затопленных отсеках, формируют информационный вектор измерений, определяют случай затопления, выделяют «скользящее окно», устанавливают режимы качки, определяют равновесные параметры посадки аварийного судна, выделяют предельно допустимые значения параметров посадки, производят оценку состояния аварийного судна и аварийной остойчивости, осуществляют мероприятия по спрямлению судна и отображают результаты в виде, удобном для восприятия судоводителем с использованием средства обеспечения совместимости, состоящего из блока нормирования и коммутации сигналов, управляющего процессора, аналого-цифрового преобразователя и интерфейса, осуществляющих преобразование и фильтрацию исходной информации и ввод ее в ЭВМ с периферийным оборудованием, включающим накопитель на магнитном диске, цветной графический дисплей и печатающее устройство, позволяющее реализовать разработанный алгоритм обработки данных измерений и отобразить результаты в виде, удобном для восприятия судоводителем.
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 1991 |
|
RU2016812C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |
| -Ричный счетчик на феррит-транзисторных ячейках | 1974 |
|
SU517166A1 |
| JPS 61111415 A, 29.05.1986 | |||

