Изобретение относится к области судостроения, а именно к способам контроля мореходных качества аварийных судов, и может быть использовано при создании экспертных систем мониторинга безопасности мореплавания.
Известен способ контроля остойчивости, основанный на измерении периода бортовой качки и определении расчетом метацентрической высоты, при вычислении которой дополнительно измеряют осадки носом и кормой, кажущийся период волны, курсовой угол и скорость судна на нерегулярном волнении. Недостаток способа - отсутствие контроля равновесных углов крена и дифферента при качке аварийного судна.
Цель изобретения - повышение точности контроля непотопляемости поврежденного судна в условиях эксплуатации.
Сущность изобретения: дополнительно измеряют амплитуды угловых перемещений и ускорений относительно продольной и поперечной центральных осей при бортовой и килевой качке судна на нерегулярном волнении.
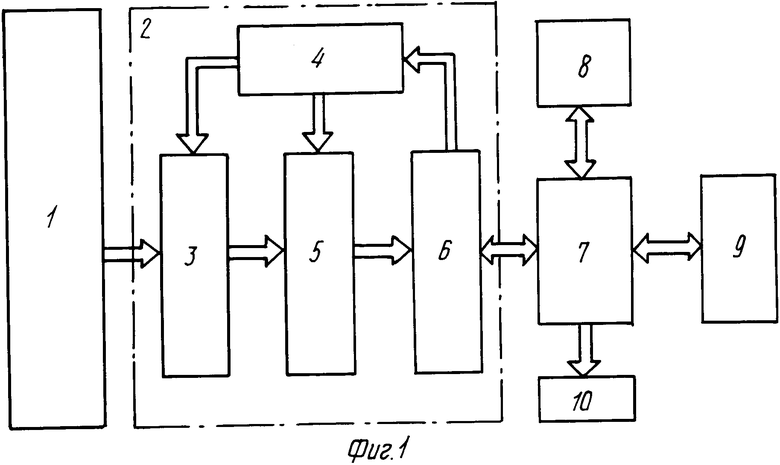
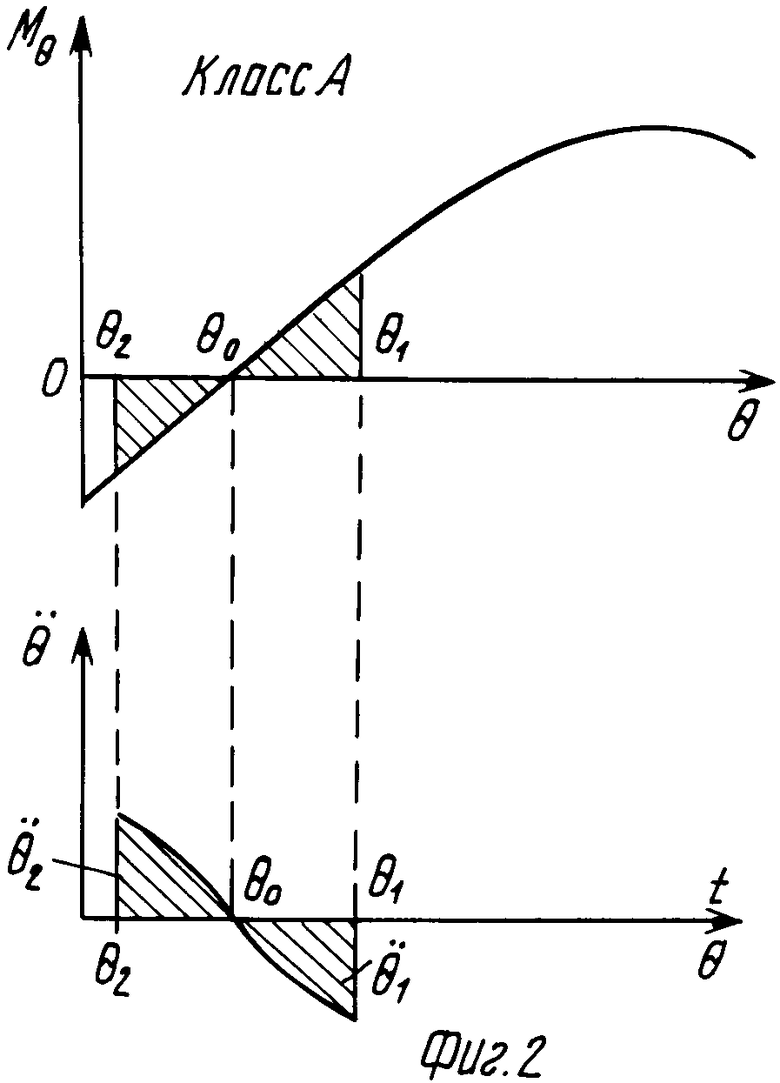
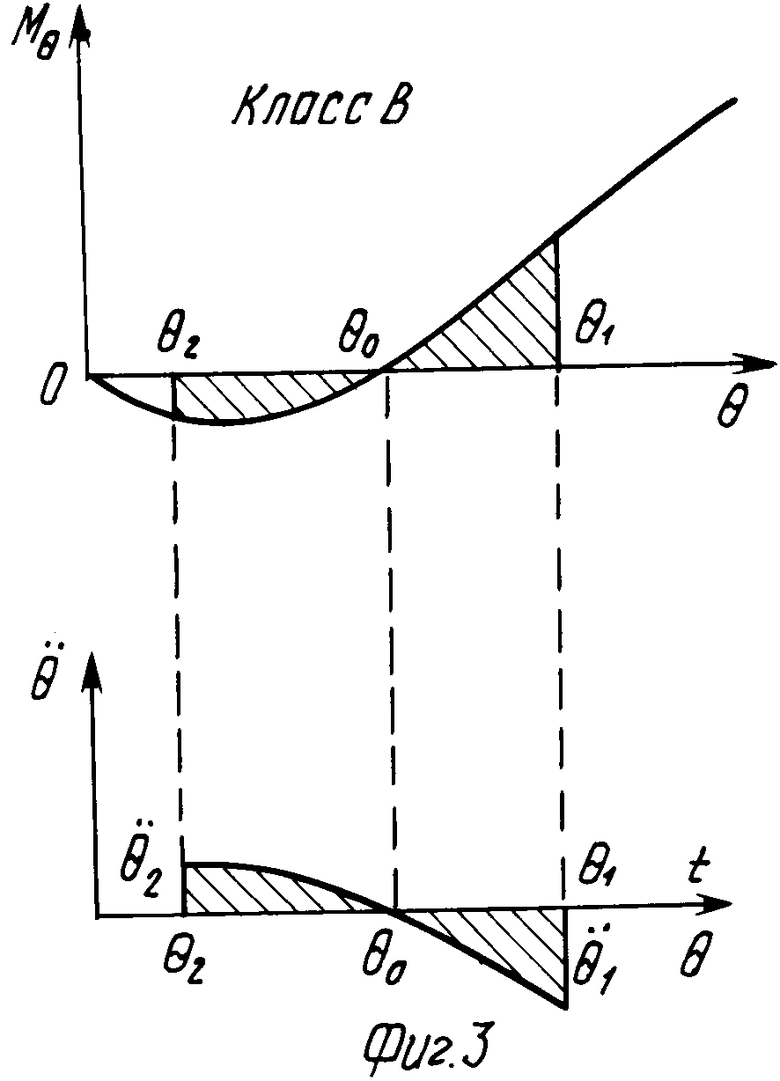
На фиг.1 представлена структурная схема, реализующая предлагаемый способ; на фиг.2 и 3 показан характер изменения восстанавливающего момента MΘи угловых ускорений  в зависимости от угла крена Θ и времени t.
в зависимости от угла крена Θ и времени t.
Схема содержит блок датчиков 1, включающий датчики периода бортовой качки, осадок судна носом и кормой, кажущегося периода волны, курсового угла и скорости судна, а также датчики угловых перемещений и ускорений при бортовой и килевой качке, блок обеспечения совместимости 2, содержащий средства нормирования и коммутации сигналов 3, управляющий процессор 4, аналого-цифровой преобразователь (АЦП) 5 и интерфейс 6, вычислительный блок 7 (быстродействующая персональная ЭВМ), накопитель на магнитном диске 8, цветной графический дисплей 9 и печатающее устройство 10.
Cпособ осуществляют следующим образом.
С помощью датчиков в измерительном блоке 1 регистрируют период бортовой качки, осадки судна носом и кормой, кажущийся период волны, курсовой угол и скорость судна и одновременно производят измерение угловых перемещений Θ(t), Ψ(t) и ускорений  (t),
(t),  (t) при бортовой и килевой качке на временном интервале, продолжительностью 6-8 мин. Поступающие с датчиков сигналы коммутируют и подвергают предварительной обработке в блоке 2, где происходит их сглаживание и преобразование в цифровые коды.
(t) при бортовой и килевой качке на временном интервале, продолжительностью 6-8 мин. Поступающие с датчиков сигналы коммутируют и подвергают предварительной обработке в блоке 2, где происходит их сглаживание и преобразование в цифровые коды.
По данным измерений устанавливают:
характер колебательного движения судна путем классификации данных измерений амплитуд угловых ускорений:
( )ср=(
)ср=( )ср - линейные колебания (класс А);
)ср - линейные колебания (класс А);
( )ср≠(
)ср≠( )ср - нелинейные колебания (класс В), где (
)ср - нелинейные колебания (класс В), где ( )ср=
)ср= /N и (
/N и ( )ср=
)ср= /N - средние значения амплитуд угловых ускорений при максимальных наклонениях судна на правый Θ1 и левый Θ2 борт в пределах одного размаха; N - число размахов (полупериодов) бортовой качки на участке регистрации;
/N - средние значения амплитуд угловых ускорений при максимальных наклонениях судна на правый Θ1 и левый Θ2 борт в пределах одного размаха; N - число размахов (полупериодов) бортовой качки на участке регистрации;
- углы равновесного крена Θо для каждого из размахов бортовой качки за время регистрации процессов Θ(t) и  (t) на основании формул:
(t) на основании формул:
класс А
Θ0iI=0,5( +
+ ) ;
) ;
класс В =
= +f(θ,
+f(θ, )sign
)sign

 ,, где f(θ,
,, где f(θ, ) = 0.65-0.69;
) = 0.65-0.69;
средние значения рассматриваемых углов равновесного крена для классов А и В:
(θo)A= /N , (θo)B=
/N , (θo)B= /N ..
/N ..
Процедуру, аналогичную описанной выше применяют и для определения равновесных углов дифферента (Ψо)А и (Ψо)В;
случай затопления - путем сопоставления значений Θо и Ψо и метацентрической высоты ho, установленной по результатам измерений, с величинами углов Θ, Ψи метацентрической высоты h, определенных с помощью расчетов непотопляемости для различных отсеков и их комбинаций.
Осуществляют мероприятия по спрямлению судна на основе рекомендаций экспертной системы.
Операции по обработке данных измерений выполняются в вычислительном блоке 7 с помощью быстродействующей персональной ЭВМ. Полученные результаты заносят во внешнюю память 8, выводят на дисплей 9 и документируют с помощью принтера 10.
Устройство, реализующее способ, работает следующим образом.
С помощью датчиков, размещенных в блоке 1, ведут измерение периода бортовой качки, осадок судна носом и кормой, кажущегося периода волны, курсового угла и скорости судна. Одновременно производят измерение угловых перемещений и ускорений при бортовой и килевой качке судна с затопленными отсеками, сигналы от которых поступают на средства обеспечения совместимости 2, состоящие из блока нормирования и коммутации сигналов 3, управляющего процессора 4, АЦП 5 и интерфейса 6, осуществляющими преобразование и фильтрацию исходной информации и ввод ее в ЭВМ 7 с периферийным оборудованием, включающем накопитель на магнитном диске 8, цветной графический дисплей 9 и печатающее устройство 10, позволяющими реализовать разработанный алгоритм обработки данных измерений и отобразить результаты в виде, удобном для восприятия судоводителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА | 2013 |
|
RU2518374C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА НА РАЗРУШАЮЩЕМСЯ ВОЛНЕНИИ | 2011 |
|
RU2455190C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2009 |
|
RU2405712C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1994 |
|
RU2091269C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1998 |
|
RU2147540C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1990 |
|
RU2033370C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА | 1991 |
|
RU2040429C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 1992 |
|
RU2043271C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА | 2019 |
|
RU2740617C1 |
| СПОСОБ КОНТРОЛЯ ОСТОЙЧИВОСТИ СУДНА В УСЛОВИЯХ ЭКСТРЕМАЛЬНОГО ВОЛНЕНИЯ | 2016 |
|
RU2647357C1 |
Использование: оперативного контроля непотопляемости судов в условиях эксплуатации. Сущность изобретения: измеряют угловые перемещения и ускорения при бортовой и килевой качке, определяют равновесные углы крена и дифферента, устанавливают случай затопления, прогнозируют среднюю осадку и метацентрическую высоту, классифицируют характер затопления и причину возникновения аварийного крена и дифферента, производят оценку аварийной остойчивости и осуществляют мероприятия по спрямлению судна и восстановлению остойчивости. Положительный эффект - повышение безопасности плавления. 3 ил.
СПОСОБ КОНТРОЛЯ НЕПОТОПЛЯЕМОСТИ СУДНА, заключающийся в измерении периода бортовой качки, осадки носом и кормой, курсового угла и скорости судна в условиях волнения и определении расчетом метацентрической высоты, отличающийся тем, что дополнительно измеряют амплитуды угловых перемещений и ускорений судна относительно продольной и поперечной его центральных осей.
| Авторское свидетельство СССР N 1667334, кл | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
