Заявляемое изобретение относится к навигационно-пилотажным комплексам, объединяющим несколько навигационных систем для формирования обобщенной выходной информации о местонахождении объекта, его ориентации в пространстве и его скоростях, а также использующим внешнюю информацию для коррекции систем, входящих в состав комплекса.
Например в способе RU 2634082 (С1, 23.10.2017 г.) выходная информация, поступающая по меньшей мере с двух бесплатформенных инерциальных систем, сравнивается по мажоритарному признаку, после чего отбраковывается информация той бесплатформенной инерциальной системы, которая наиболее отклоняется от остальных, при этом согласно изобретению первичная информация в виде матриц ориентации и приращений линейных скоростей поступает с выходов бесплатформенных инерциальных систем на вход блока обработки первичной информации, в котором по заданному критерию формируется осредненное значение матрицы ориентации и приращения линейных скоростей, эти осредненные значения поступают на вход блока решения навигационных уравнений, а полученные в результате решения навигационных уравнений выходные параметры в виде текущих координат и курса объекта и его скоростей поступают на вход блока контроля, в котором производится сравнение выходных параметров бесплатформенных инерциальных систем с выходными параметрами блока решения навигационных уравнений и анализ отказных ситуаций узлов бесплатформенных инерциальных систем. Недостатком этого технического решения является отсутствие возможности коррекции параметров в случае возникновения систематических коррелированных ошибок, которые могут возникнуть сразу на всех инерциальных системах и смогут быть отфильтрованы блоком контроля.
В патенте (RU 2460043 С1, 27.08.2012 г.) реализована связь между БИНС и СНС с использованием фильтра Калмана, в котором коэффициент усиления изменяется с учетом текущих значений модулей перегрузки и угловой скорости. Достоинством способа из патента является возможность адаптации коэффициента усиления к отклонениям кажущейся вертикали от гравитационной в условиях интенсивного маневрирования, что приводит к повышению точности коррекции БИНС по углам крена, тангажа и обеспечение измерения курса с требуемой точностью во всем диапазоне полета путем создания способа непрерывной коррекции от СНС. Недостатком предложенного изобретения является невозможность осуществления коррекции при отсутствии спутниковых сигналов.
В патенте (RU 2767477 С1, 17.03.2022 г.) предложен способ навигации беспилотных летательных аппаратов, заключающийся в получении эталонных и рабочих изображений земной поверхности, подвергнутых пороговой обработке с получением множества опорных точек - контуров и оценкой данных максимума двумерной взаимокорреляционной функции. В патенте предлагается оценка географического положения максимума взаимокорреляционной функции по эталонной матрице опорных точек - контуров и используют данную оценку положения максимума взаимокорреляционной функции для автономной навигации беспилотных летательных аппаратов по данным измеренных значений курса, крена, тангажа и высоты беспилотного летательного аппарата. Недостатком этого изобретения является невозможность использования подхода при ухудшении качества информации, получаемой с инфракрасной камеры, например, в туманное время суток или при движении в слабо изменяемых условиях местности, например, лес или полет над водной поверхностью.
Наиболее близким аналогом является патент (RU 2708901 С1, 12.12.2019 г.), в котором выходная информация, поступающая по меньшей мере с двух бесплатформенных инерциальных навигационных систем, сравнивается по мажоритарному признаку, после чего отбраковывается информация той бесплатформенной инерциальной навигационной системы, которая наиболее отклоняется от остальных. Недостатком этого технического решения является то, что отсутствует возможность коррекции параметров в случае возникновения систематических коррелированных ошибок, которые могут привести к уходу бесплатформенных навигационных систем в одном направлении, что приведет к сравнению попарных разностей показаний бесплатформенных инерциальных навигационных систем, однако отфильтрованные значения приведут к накоплению погрешности.
Технической задачей, решаемой заявляемым изобретением, является повышения точности определения навигационных параметров за счет совершенствования технологий объединения измерительной информации, поступающей в бортовой навигационный комплекс с помощью формирования приоритетного режима работы навигационного комплекса, который формирует режимы работы и создаст обратные связи для систем коррекции измерительных блоков и основан на дополнительной оценке внешних условий. При этом изобретение способно работать с различными измерениями, в том числе зашумленными, основанными на различных физических принципах.
Достигаемый технический результат заключается в повышении точности определения координат местоположения объекта и углов ориентации.
Технический результат достигается тем, что способ комплексирования бесплатформенных инерциальных навигационных систем (БИНС), заключающийся в том, что при поступлении информации о местоположении, скорости движения и углах ориентации объекта с БИНС и корректирующих устройств формируют разность измерений, определяющую режим работы БИНС, затем передают полученную разность измерений в блок приоритетного режима работы, в котором вектор состояния каждого из режимов работы дополняют информацией о внешнем состоянии, влияющей на качество работы, сравнивают вектора состояния каждого из режимов работы между собой по мажоритарному признаку, после чего отбраковывают информацию тех корректирующих устройств, показания которых имеет максимальное отклонение от показаний остальных корректирующих устройств, затем полученные данные с выходов блока выбора приоритетного режима работы подают на вход блока формирования поправок, в котором формируют выбор разности входных значений между БИНС и корректирующими устройствами, а при помощи прошедших фильтрацию значений формируют обратную связь для коррекции показаний значений БИНС.
На чертеже представлена навигационная система, осуществляющая предложенный способ.
Навигационные параметры, измеренные с инерциальной навигационной системы и других систем коррекции формируют разность измерений, после чего информация поступает в блок выбора приоритетного режима работы, в котором вектор состояния дополняется информацией о окружающей среде, после чего в блоке происходит сравнение векторов измерений, после чего отбраковывается информация тех корректирующих устройств, показания которых наиболее отклоняются от остальных, и поступает с выходов на вход блока формирования поправок, в котором полеченные значения интерполируются, экстраполируются и фильтруются, а полученные отфильтрованные значения формируют обратную связь для коррекции показаний значений.
Модель измерений в виде измерителя с номером i с матрицей наблюдаемости Hi и случайной ошибкой измерения νi, измерение zi определено как:

где zi - i-oe измерение, Hi - матрица наблюдаемости, связывающая измерение с состоянием, х - вектор состояния системы, G - матрица шумов системы, νi - случайная ошибка измерения.
Множество возможных режимов работы бортового навигационного комплекса в виде М={m1, m2, …, mk}, где каждый режим mj соответствует определенной комбинации измерителей.
Для выбора mj есть внешняя информация или измерения, которые позволяют определить, какой режим является наиболее подходящим в данной ситуации. Обозначим это как r, где r принимает значения из множества М, указывая выбранный режим работы.
Таким образом приоритет режима работы, учитывая внешние условия и цель системы может быть сформулирован, как задача оптимизации с целью минимизации ошибок или максимизации точности оценок состояния:

где ropt - оптимальный выбранный режим работы, J(r) - целевая функция, которая оценивает качество оценки состояния для каждого режима работы.
Целевая функция J(r) может быть определена на основе различных критериев, таких как: среднеквадратичная ошибка оценки, индекс доверия, или любые другие показатели, отражающие требования и внешние условия конкретной навигационной системы. Это может быть сформулировано как задача оптимизации для минимизации ошибок оценки состояния или максимизации точности оценок.
В оптимизационной задаче могут учитываться динамика переключения между режимами работы и возможные переходные процессы.
Апостериорная оценка состояния примет вид:

где xhat - апостериорная оценка состояния системы, учитывающая выбранный режим работы и наблюдения.
При разработке способа апробированный алгоритм показал уменьшение погрешности в области определения координат местоположения объекта и углов ориентации. Способ реализован в виде программного продукта и в программно-аппаратном комплексе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ комплексирования бесплатформенных инерциальных навигационных систем | 2019 |
|
RU2708901C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2016 |
|
RU2634082C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634071C1 |
| КОМБИНИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ АСТРОИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2017 |
|
RU2654965C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОРРЕКТИРУЮЩИХ ПОПРАВОК В БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЕ | 2017 |
|
RU2654964C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| НАВИГАЦИОННО-ПИЛОТАЖНЫЙ КОМПЛЕКС | 2016 |
|
RU2634083C1 |

Изобретение относится к навигационно-пилотажным комплексам, объединяющим несколько инерциальных навигационных систем. Заявленный способ формирования навигационной информации бесплатформенных инерциальных навигационных систем (БИНС) заключается в том, что посредством информации о местоположении, скорости движения, углах ориентации объекта, поступающей с БИНС, формируют разность измерений, определяющую режим работы БИНС, а затем передают полученную разность в блок приоритетного режима работы, в котором вектор состояния каждого из режимов работы дополняется информацией о внешнем состоянии, влияющей на качество работы. При этом вектора состояния режимов работы сравнивают между собой по мажоритарному признаку, после чего отбраковывают информацию тех корректирующих устройств, показания которых имеют максимальное отклонение от остальных. Затем полученные данные подают на вход блока формирования поправок, формирующего критерий выбора разности входных значений между БИНС и остальными корректирующими устройствами. При этом полученные значения формируют обратную связь для коррекции показаний значений. Технический результат заключается в повышении точности определения координат и углов ориентации. 1 ил.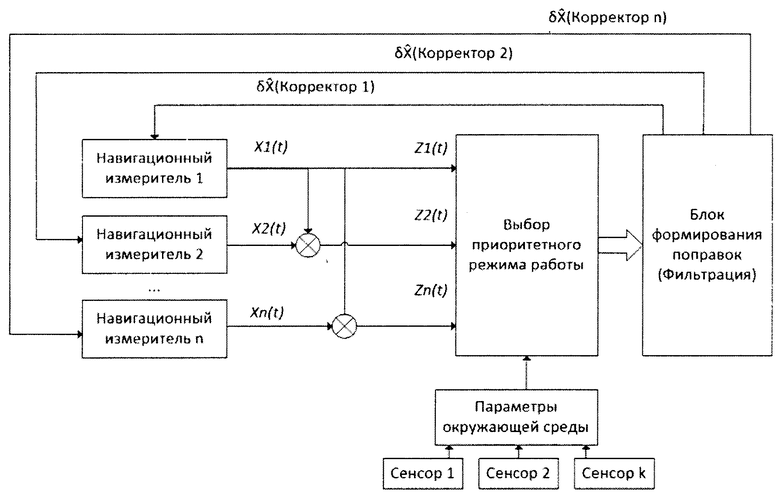
Способ комплексирования бесплатформенных инерциальных навигационных систем (БИНС), заключающийся в том, что при поступлении информации о местоположении, скорости движения и углах ориентации объекта с БИНС и корректирующих устройств формируют разность измерений, определяющую режим работы БИНС, затем передают полученную разность измерений в блок приоритетного режима работы, в котором вектор состояния каждого из режимов работы дополняют информацией о внешнем состоянии, влияющей на качество работы, сравнивают вектора состояния каждого из режимов работы между собой по мажоритарному признаку, после чего отбраковывают информацию тех корректирующих устройств, показания которых имеют максимальное отклонение от показаний остальных корректирующих устройств, затем полученные данные с выходов блока выбора приоритетного режима работы подают на вход блока формирования поправок, в котором формируют выбор разности входных значений между БИНС и корректирующими устройствами, а при помощи прошедших фильтрацию значений формируют обратную связь для коррекции показаний значений БИНС.
| Способ комплексирования бесплатформенных инерциальных навигационных систем | 2019 |
|
RU2708901C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ | 2016 |
|
RU2634082C1 |
| DE 60134556 D1, 07.08.2008 | |||
| US 6408245 B1, 18.06.2002. | |||

