Изобретение относится к области оптических измерений геометрических параметров формы, положения, движения и деформации объектов в пространстве, в частности, к ближней фотограмметрии и видеограмметрии и может применяться в научных исследованиях, в машиностроении и в других областях для измерений геометрических параметров объектов.
Существуют многочисленные способы и устройства оптических измерений геометрических параметров объектов. Наиболее широко известными являются методы, связанные с фотограмметрией. Основное назначение фотограмметрии состоит в измерениях геометрических параметров участков поверхности земли по снимкам с воздуха или из космоса, т.е. с большого расстояния. Это так называемая фотограмметрия дальней зоны. Также эти методы применяются и для бесконтактных измерений геометрических параметров объектов на коротких расстояниях в единицы и десятки метров, это фотограмметрия ближней зоны или ближняя фотограмметрия. В последнее время методы фотограмметрии реализуются с применением цифровых средств регистрации изображений и называются цифровой фотограмметрией или видеограмметрией. Фотограмметрия ближней зоны широко применяется в научных исследованиях, промышленном производстве, строительстве, медицине и др. областях.
Суть метода фотограмметрии состоит в регистрации центральной проекции трехмерного объекта на плоскость в виде изображения, измерении двухмерных координат u,v выделенных точек на изображении и вычислении пространственных координат x,y,z точки поверхности исследуемого объекта по формулам рабочей характеристики центральной проекции. В прямой форме рабочая характеристика центральной проекции поставлена некорректно, т.е. для каждой точки имеются три неизвестных и только два уравнения:
где: x0,y0,z0 - координаты центра проекции (центра приемного объектива) в системе координат объекта, u0,v0,w0 - координаты начала системы координат изображения в системе координат камеры, Mij (i,j=1,2,3) - элементы матрицы 3×3 направляющих косинусов системы координат камеры в системе координат объекта.
Существуют три основных пути решения проблемы некорректности восстановления координат: стереосъемка, применение структурированного освещения и использование априорной информации. В изобретении использован способ фотограмметрии с использованием априорной информации, для реализации которого требуется только одна цифровая камера и одна точка наблюдения, что представляет существенное преимущество в условиях стесненного пространства и ограниченного оптического доступа, характерных для аэродинамического или промышленного эксперимента и производства.
Наиболее близким решением является способ оптических измерений геометрических параметров объекта в пространстве с помощью одной камеры и системы реперных точек, то есть меток, хорошо различимых на поверхности объекта [Патент РФ №2551396 С1, МПК G01B 11/16, 2013 (п.2)], выбранный в качестве прототипа, при котором на поверхности объекта в заданных точках наносят реперы, определяют параметры рабочей характеристики, измеряют на изображении двухмерные координаты образов реперов, на основании заранее известных геометрических параметров объекта в пространстве на его поверхности выделяются обособленные зоны, для которых формируют собственную математическую параметрическую модель, одну из обособленных зон выделяют так, чтобы можно было считать точки ее поверхности взаимно неподвижными, принимая ее за базовую, для нее определяют параметры взаимного расположения реперов в собственной системе координат и собственные параметры внешнего ориентирования, а при обработке из измеренных двухмерных координат, параметров рабочей характеристики, собственных параметров внешнего ориентирования базовой зоны, математической параметрической модели методами многомерной минимизации находят искомые геометрические параметры модели.
Недостаток этого способа заключается в том, что он предполагает разделение объекта на части с известными геометрическими параметрами, что не всегда удается сделать, в особенности, если нельзя предсказать движение объекта. Также для нахождения обобщенных параметров из измеренных координат требуются дополнительные данные, процедуры и вычисления.
Техническим результатом предлагаемого способа являются сокращение времени и объема вычислений при обработке изображений, из-за отсутствия необходимости определения трехмерных координат всех реперов на поверхности в недеформируемом состоянии, применение метода видеограмметрии для объектов со сложным движением с большим числом степеней свободы без разбиения на зоны поверхности объекта и без использования математической параметрической модели движения.
Технический результат достигается тем, что в способе измерений координат точек объекта в пространстве, при котором на поверхности объекта размещают реперы, на основе заранее известных геометрических закономерностей исследуемого объекта и его движения один из участков поверхности принимают за базовый, на нем выделяют группу базовых реперов и определяют их начальные трехмерные координаты, находят параметры рабочей характеристики, при нагружении фиксируют изображение, на изображении определяют двухмерные координаты образов всех реперов, с помощью найденных параметров рабочей характеристики находят искомые трехмерные координаты всех реперов, согласно изобретению реперы размещают в соответствии с заданными исходными геометрическими связями между ними, последовательно определяют прогнозируемые значения трехмерных координат реперов, используя при этом заданные геометрические связи и исходные трехмерные координаты базовых реперов и/или найденные трехмерные координаты следующих за базовыми реперами, определяют искомые трехмерные координаты каждого репера, производят уточнение прогнозируемых трехмерных координат реперов, для чего варьируют прогнозируемые координаты в пределах заданных геометрических связей, с использованием параметров рабочей характеристики в обращенной форме для каждой вариации координат вычисляют текущие значения двухмерных координат реперов, сопоставляют их с двухмерными координатами образов реперов на изображении и принимают за результирующие координаты текущего репера вариацию трехмерных координат, отвечающую максимуму критерия совпадения.
Перечень фигур, иллюстрирующих работу предложенного способа и устройства.
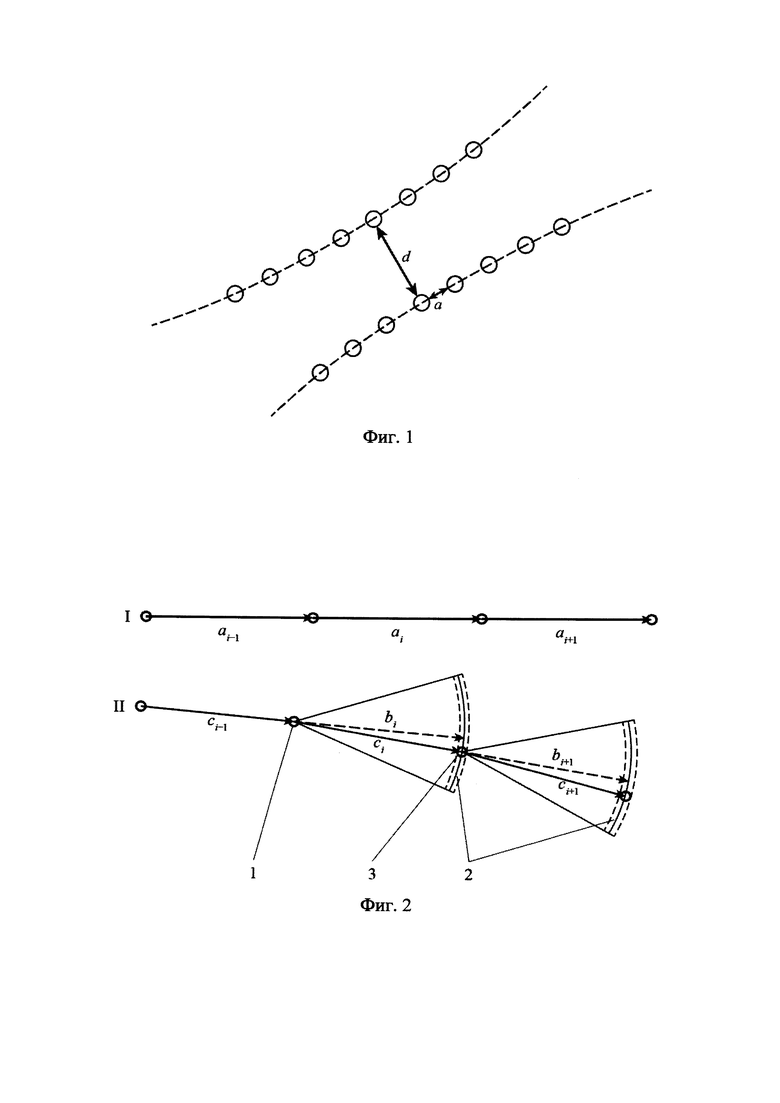
На фиг. 1 показаны линии реперов малой кривизны с характерными расстояниями.
На фиг. 2 схематически показана возможная реализация схемы последовательного поиска реперов в ряде.
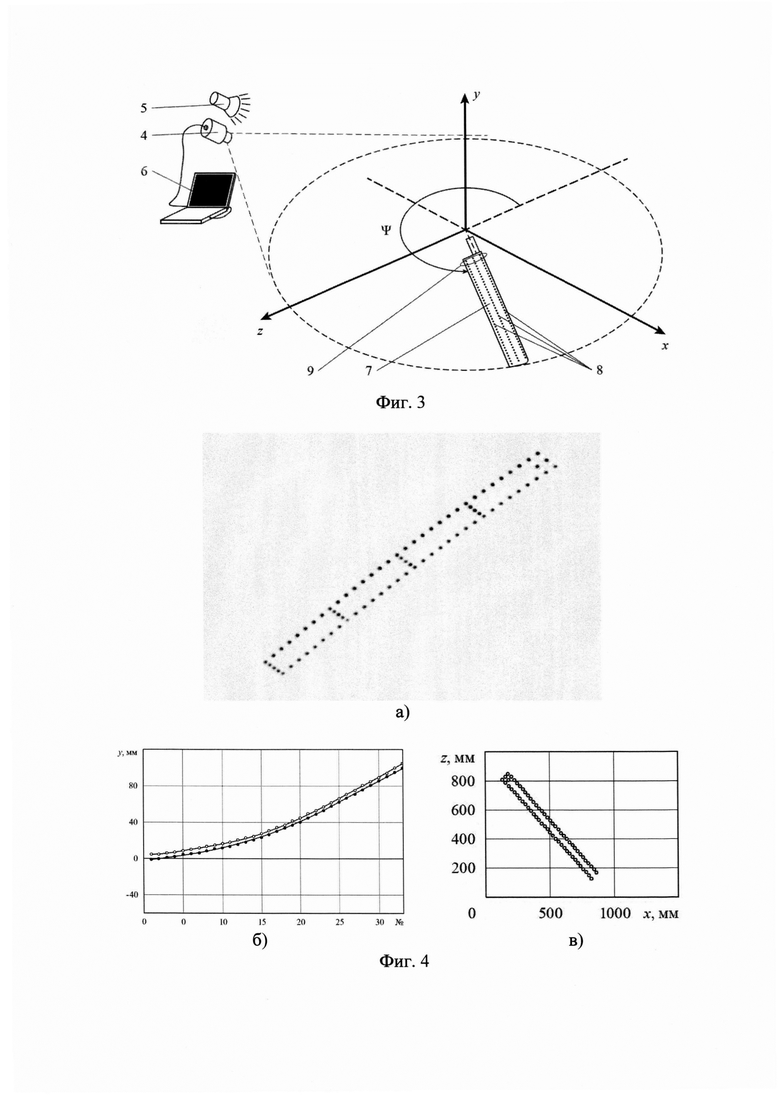
На фиг. 3 показан пример реализации способа измерения формы и положения модели лопасти винта вертолета в рабочей части аэродинамической трубы ЦАГИ Т-105.
На фиг. 4 приведены результаты измерения формы и положения модели лопасти винта вертолета в рабочей части аэродинамической трубы ЦАГИ Т-105.
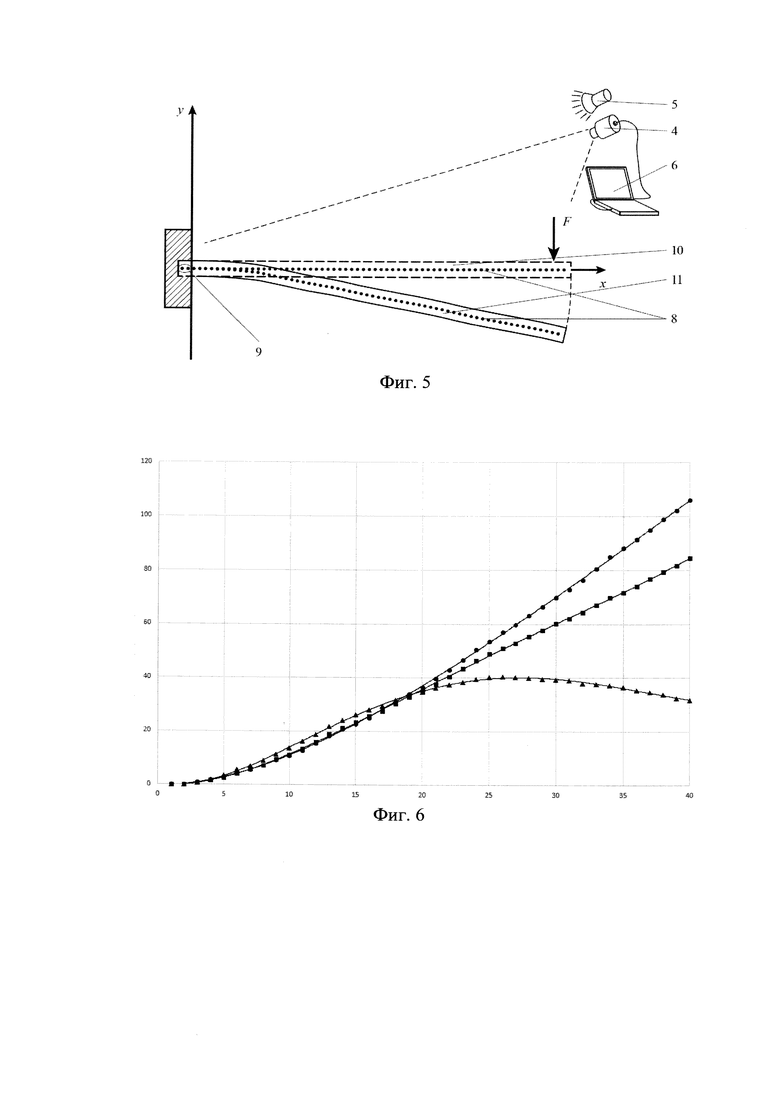
На фиг. 5 показан пример реализации способа измерения деформаций закрепленной балки под нагрузкой.
На фиг. 6 показаны результаты измерений вертикальных отклонений в зависимости от номера при свободных колебаниях пластины на опоре.
Функциональная зависимость (1) определяется набором по меньшей мере девяти констант. Шесть из них x0,y0,z0 и α,β,γ называют параметрами внешнего ориентирования, они определяют положение и ориентацию устройства регистрации изображения в системе координат объекта, а три оставшихся u0,v0,w0 - параметрами внутреннего ориентирования, которые определяют характеристики камеры. К параметрам внутреннего ориентирования причисляют также параметры геометрических искажений изображения, такие как коэффициенты дисторсии, разномасштабности и другие. Их определяют обычно отдельной процедурой в лабораторных условиях при настройке камеры.
Параметры внешнего ориентирования определяют в процедуре калибровки с помощью специальных контрольных приспособлений или тест-объектов, содержащими набор реперов с известными пространственными координатами. Тест-объект помещается в пространство измерений, регистрируется его изображение и измеряются двухмерные координаты образов реперов на изображении. При известных пространственных координатах реперов тест-объекта и измеренных координатах проекций этих реперов на изображении, по формулам центральной проекции (1) численно определяются значения параметров внешнего ориентирования.
Реперы на поверхность исследуемого объекта наносят с помощью разнообразных средств. Это могут быть кисточки с краской, лазерные принтеры, самоклеящаяся бумага и другие средства. Реперы должны быть хорошо различимыми на фоне поверхности объекта и поддаваться идентификации, то есть однозначному соответствию пространственных координат и двухмерных координат их образов на изображении.
В качестве источников света могут применяться различные лампы (накаливания, газоразрядные, полупроводниковые, искровые и т.д.). Мощность, энергия и спектр излучения выбирается в соответствии с решаемой задачей.
Однако, одной функциональной зависимости (1) не достаточно для достоверного нахождения искомых координат реперов х,у,z. Для решения этой проблемы в изобретении применяют специальную структуру расположения реперов на поверхности и последовательного пространственного поиска реперов с заданными геометрическими связями.
На основе заранее известных геометрических закономерностей исследуемого объекта и его движения один из участков поверхности принимают за базовый, на него наносят группу базовых реперов, их используют в качестве начала рядов реперов, покрывающих поверхность объекта. Место нанесения базовых реперов определяют и выбирают в зависимости от характера движения объекта, это - часть поверхности объекта, движение которой мало и его можно не учитывать, или измерить другим способом, или достаточно точно смоделировать. Ряды реперов формируют по прямой или произвольной линии на поверхности, в зависимости от используемых геометрических связей. Расстояния между последовательными реперами в ряду, что является одним из вариантов геометрических связей, могут быть одинаковыми или разными, но заранее известными и малыми на столько, что при нагружении объекта эти расстояния считают неизменными.
Во время эксперимента определяют трехмерные координаты базовых реперов (например, при вращении лопасти базовыми реперами можно считать точки близкие к оси вращения и моделировать вращение в полном диапазоне угла азимута в плоскости вращения без вертикальных отклонений). Для остальных реперов в ряде по известным трехмерным координатам базовых реперов и/или найденным трехмерным координатам следующих за базовыми реперами и исходным геометрическим связям последовательно определяют прогнозируемые значения трехмерных координат реперов, определяют искомые трехмерные координаты каждого репера, уточняя прогнозируемые трехмерные координаты реперов, для чего варьируют прогнозируемые координаты в пределах заданных геометрических связей, с использованием параметров рабочей характеристики в обращенной форме для каждой вариации координат вычисляют текущие значения двухмерных координат реперов, сопоставляют их с двухмерными координатами образов реперов на изображении и принимают за результирующие координаты текущего репера вариацию трехмерных координат, отвечающую максимуму критерия совпадения.
Предложенный способ прошел проверку в лабораторных исследованиях, а также в аэродинамическом эксперименте при исследовании модели лопасти вертолета и может применяться в следующих актуальных задачах:
- определение формы, смещения и деформации «жестких», упругоподобных и динамическиподобных моделей летательного аппарата в потоке аэродинамической трубы;
- измерение положения и деформации вращающихся элементов конструкции: лопастей, лопаток и других;
- определение деформаций объектов в прочностном эксперименте.
На фиг. 1 схематично показаны линии реперов малой кривизны. Необходимо выполнение d>а, то есть расстояния между соседними в каждом ряду реперами меньше, чем расстояния между соседними рядами.
На фиг. 2 показана возможная реализация схемы последовательного поиска реперов в ряде. Под римской цифрой I показан ряд реперов в исходном состоянии с измеренными расстояниями между соседними реперами (ai). Под римской цифрой II показано деформированной расстояние. Под цифрой 1 показан i-й репер ряда. Под цифрой 2 пунктирными линиями показаны пространственные области последовательного прогноза трехмерных координат последующих реперов и вариации приращения этих координат с сохранением заданных геометрических связей. Из трехмерных координат реперов последовательно формируются вектора, для которых необходимо выполнение следующих соотношений:
Значения трехмерных координат последующего репера (цифра 3) определяют по обращенным формулам центральной проекции и с условием нахождения максимума критерия совпадения по яркости соответственной области на полученном изображении.
На фиг. 3 показана схема измерений формы и положения модели лопасти винта вертолета. На схеме показаны: устройство для регистрации изображений (камера) 4, осветительный прибор 5, средство для сбора и обработки изображений 6, исследуемый объект 7, линии реперов 8, группа базовых реперов 9, нанесенные на малом расстоянии от оси вращения. Модель лопасти вращается вокруг оси (изменяется азимутальный угол Ψ), в потоке воздуха под действием аэродинамических сил претерпевает деформации. Деформациями реперов, расположенных близко к оси вращения, можно пренебречь, поэтому их координаты представляется возможным определить через моделирование вращения с учетом угла атаки. Результаты измерений трехмерных координат будут представлены в системе координат, в которой проводилась калибровка видеограмметрической системы. Пример фотонегатива рабочего изображения модели лопасти винта вертолета в аэродинамической трубе Т-105 ЦАГИ (а) и измеренные трехмерные координаты ((б) - зависимость вертикального отклонения у от номера репера для обоих рядов реперов, (в) - измеренные значения координат х и z) показаны на фиг. 4. Реперы имели круглую форму, были изготовлены из специальной ретроотражающей бумаги и наклеены на поверхность в виде двух линий по 33 репера с шагом 30 мм.
На фиг. 5 показана схема измерений формы и деформации балки, жестко закрепленной за один конец, под нагрузкой, прилагаемой к другому концу балки. На схеме показаны: устройство (камера) для регистрации изображений 4, осветительный прибор 5, средство для сбора и обработки изображений 6, линия реперов 8 группа базовых реперов 9, нанесенных в месте крепления балки, что позволяет пренебречь их смещениями по вертикали, исследуемый объект в недеформированном положении 10, исследуемый объект в деформированном состоянии 11. В рассматриваемом случае изменением третьей координаты, перпендикулярной х и у можно пренебречь, что позволяет искать координаты репера не в пространстве, а в плоскости, что значительно уменьшает время на обработку изображений. Результатами измерений будут вычисленные координаты всех реперов в системе координат, в которой проводилась калибровка видеограмметрической системы.
Технический эффект в способе достигается тем, что ряды реперов на поверхность объекта наносятся таким образом, что известные геометрические связи в ряде не изменяются в деформированном состоянии, что позволяет измерить трехмерные координаты каждого репера в ряде без разделения объекта на обособленные зоны, введения собственных систем координат в каждой зоне, построения математических моделей и использования многомерной минимизации. Также в способе предложено использование рабочей характеристики в обращенной форме, что позволяет решить проблему некорректности рабочей характеристики в прямой форме без использования дополнительных средств.
Здесь матрица М равна обратной или, что в этом случае одно и то же, транспонированной матрице М, остальные параметры имеют тот же физический смысл, что и в рабочей характеристике (1). В этой форме явной неопределенности нет, так как есть два уравнения для определения двух неизвестных двухмерных координат u, v через пространственные координаты x,y,z.
Отличительным преимуществом предложенного способа являются отсутствие необходимости знать пространственные координаты всех реперов в недеформированном состоянии, ограничиваясь геометрическими связями между реперами на поверхности и трехмерными координатами только лишь базовых реперов.
Предложенный способ проходил проверку в лабораторном эксперименте. Объектом исследования служила плоская пластина 450 на 50 мм, имитирующая лопасть несущего винта вертолета. Пластина закреплена горизонтально в устройстве, обеспечивающем вращение вокруг вертикальной оси с возможностью задавать азимутальный угол (микрометрический винт), а также маховое движение и кручение. На поверхность пластины была наклеена сетка реперов из трех рядов по 40 реперов в каждом ряде. Реперы белого цвета на черном фоне имели круглую форму с радиусом 2 мм и были напечатаны на лазерном принтере. Расстояние между реперами в ряду - 10 мм, расстояние между рядами - 18 мм. Часть пластины, которая наиболее близка к оси вращения принята за базовую. Первые два репера в каждом ряду считают базовыми. В качестве неизменных геометрических связей используют расстояние между соседними реперами в ряду.
Перед экспериментом была проведена процедура калибровки, в качестве тест-объекта использовали рейку с нанесенной сеткой реперов с известными координатами. С помощью процедуры калибровки были найдены параметры рабочей характеристики видеограмметрической системы в виде (2).
Были проведены серии экспериментов, включавших азимутальное движение, маховое движение и кручение пластины, также задавались сложные статичные волнообразные деформации и свободные колебания. Для каждого положения определяют трехмерные координаты базовых реперов для чего в каждом положении пластины находят через моделирование вращения пластины вокруг оси без отклонений по вертикали по формулам:
где x,y,z - искомые пространственные координаты базовых реперов, x0,y0,z0 - координаты базовых реперов в исходном состоянии, ψ - угол поворота вокруг оси, его определяют по максимуму яркости образов базовых реперов на изображении.
Направления координатных осей в пространстве были выбраны следующим образом: ось OZ - в направлении от оси вращения в нулевом положении микрометрического винта, ось OY - вертикально вверх, ось ОХ- перпендикулярно двум другим осям так, чтобы система координат была правой.
Координаты остальных реперов находят последовательно. Из полученных трехмерных координат базовых реперов образуют трехмерный вектор, этот вектор прибавляют к координатам его конца, в результате получают прогнозируемые пространственные координаты следующего репера. Далее производят уточнение прогнозируемых координат, для этого в пространстве XYZ с центром в прогнозируемой точке выделяют пространственный элемент объема (в данном эксперименте - куб со сторонами 3мм×3мм×3мм). Куб разбивают на малые элементы (например, кубики размером 0,1мм×0,1мм×0,1мм). Центру каждого кубика с помощью рабочей характеристики видеограмметрической системы в обращенной форме (2) ставят в соответствие координаты u, v на изображении. Из всех найденных значений (X, Y, Z, u, v) выбирают значения трехмерных координат, которые подходят по условию сохранения расстояний в пространстве (заданных геометрических связей) XYZ и максимальной близости к центру образа соответственного репера на изображении (то есть сопоставляют их с двухмерными координатами образов реперов, измеренных на изображении). Эти значения принимают за результирующие координаты текущего репера. Аналогичные действия производят для каждого репера ряда и всех рядов, то есть для нахождения пространственных координат репера в ряду с номером i используют координаты реперов этого ряда с номерами i-1 и i-2.
Съемку проводили с помощью камеры Manta G-505 фирмы «Allied Vision» с разрешением 2452×2056 пикселей и размером матрицы 2/3'', закрепленной на специальной державке на расстоянии около 2 метров от оси вращения и на 1 метр выше плоскости вращения пластины. Камера была оснащена объективом с фокусным расстоянием 16 мм.
В статичных положениях дополнительно проводились измерения координат точек другим методом. Результаты измерений, полученные предложенным способом, показали хорошую повторяемость, как при измерении статичных положений при различных углах азимута, так и в сравнении с другим методом, разброс измерения трехмерных координат достигал 0,5 мм. На фиг. 6 показаны результаты измерений вертикальных отклонений в зависимости от номера репера при свободных колебаниях пластины на опоре.
Совокупность существенных признаков данного способа измерений координат точек объекта в пространстве состоящих в том, что реперы размещают в соответствии с заданными исходными геометрическими связями между ними, последовательно определяют прогнозируемые значения трехмерных координат реперов, используя при этом заданные геометрические связи и исходные трехмерные координаты базовых реперов и/или найденные трехмерные координаты следующих за базовыми реперами, определяют искомые трехмерные координаты каждого репера, производят уточнение прогнозируемых трехмерных координат реперов, для чего варьируют прогнозируемые координаты в пределах заданных геометрических связей, с использованием параметров рабочей характеристики в обращенной форме для каждой вариации координат вычисляют текущие значения двухмерных координат реперов, сопоставляют их с двухмерными координатами образов реперов на изображении и принимают за результирующие координаты текущего репера вариацию трехмерных координат, отвечающую максимуму критерия совпадения позволяет достичь заявленный технический результат, заключающий в сокращении времени и объема вычислений при обработки изображений при отсутствии необходимости определения трехмерных координат всех реперов на поверхности тела в недеформируемом состоянии, применение метода видеограмметрии для исследования объектов со сложным движением с большим числом степеней свободы без разбиения на зоны поверхности объекта и без использования математической параметрической модели движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерения пространственных координат точек объекта с высокой продольной жёсткостью | 2024 |
|
RU2835117C1 |
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКИХ СИСТЕМ И КОНТРОЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645432C1 |
| СПОСОБ БЕСКОНТАКТНЫХ ИЗМЕРЕНИЙ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2551396C1 |
| Устройство для измерения геометрических параметров движения и деформации вращающихся объектов | 2023 |
|
RU2808386C1 |
| СПОСОБ ГРАДУИРОВКИ РАСПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАЗРЕШЕНИЯ УСТРОЙСТВА ПОЛУЧЕНИЯ ЦИФРОВОГО РЕНТГЕНОВСКОГО ИЗОБРАЖЕНИЯ | 2024 |
|
RU2826349C1 |
| СПОСОБ СОВЕРШЕНСТВОВАНИЯ ФОТОТРИАНГУЛЯЦИИ ПРИ СОЗДАНИИ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2023 |
|
RU2835990C2 |
| Способ определения собственных координат по трем визирным светоизлучающим маркерам | 2024 |
|
RU2838123C1 |
| Триангуляционный метод измерения площади участков поверхности внутренних полостей объектов известной формы | 2017 |
|
RU2655479C1 |
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКОЙ СИСТЕМЫ С ПОМОЩЬЮ МАЯТНИКА | 2023 |
|
RU2823551C1 |
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОГО ИЗМЕРЕНИЯ РАЗМЕРОВ И КОНТРОЛЯ ФОРМЫ ТЕЛА, ОГРАНИЧЕННОГО НАБОРОМ СВЯЗАННЫХ МЕЖДУ СОБОЙ ПОВЕРХНОСТЕЙ | 2013 |
|
RU2522809C1 |
Изобретение относится к области оптических измерений трехмерных координат объектов в пространстве, в частности к ближней фотограмметрии и видеограмметрии, и может применяться в научных исследованиях, в машиностроении и в других областях для измерений координат точек поверхности объектов. Способ измерений координат точек объекта в пространстве заключается в том, что на поверхности объекта размещают реперы, на участках ожидаемой минимальной деформации выделяют группу базовых реперов и определяют их начальные трехмерные координаты, находят параметры рабочей характеристики, при нагружении фиксируют изображение, на изображении определяют двухмерные координаты образов всех реперов, с помощью найденных параметров рабочей характеристики находят искомые трехмерные координаты всех реперов. При этом реперы размещают в соответствии с заданными исходными геометрическими связями между ними, последовательно определяют прогнозируемые значения трехмерных координат реперов, используя при этом заданные геометрические связи и исходные трехмерные координаты базовых реперов и/или найденные трехмерные координаты реперов, следующих за базовыми реперами. Затем определяют прогнозируемые значения трехмерных координат каждого репера, производят уточнение трехмерных координат, для чего варьируют прогнозируемые координаты в пределах заданных геометрических связей, с использованием параметров рабочей характеристики в обращенной форме для каждой вариации координат вычисляют текущие значения двухмерных координат реперов, сопоставляют их с двухмерными координатами образов реперов на изображении и принимают за результирующие координаты текущего репера вариацию трехмерных координат, отвечающую максимуму критерия совпадения. Технический результат – сокращение времени и объема вычислений при обработке изображений. 6 ил.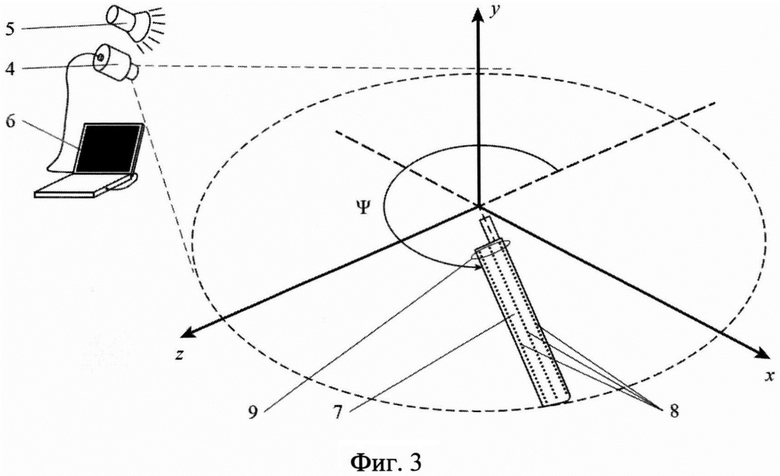
Способ измерений координат точек объекта в пространстве, при котором на поверхности объекта размещают реперы, на участках ожидаемой минимальной деформации выделяют группу базовых реперов и определяют их начальные трехмерные координаты, находят параметры рабочей характеристики, при нагружении фиксируют изображение, на изображении определяют двухмерные координаты образов всех реперов, с помощью найденных параметров рабочей характеристики находят искомые трехмерные координаты всех реперов, отличающийся тем, что реперы размещают в соответствии с заданными исходными геометрическими связями между ними, последовательно определяют прогнозируемые значения трехмерных координат реперов, используя при этом заданные геометрические связи и исходные трехмерные координаты базовых реперов и/или найденные трехмерные координаты реперов, следующих за базовыми реперами, определяют прогнозируемые значения трехмерных координат каждого репера, производят уточнение трехмерных координат, для чего варьируют прогнозируемые координаты в пределах заданных геометрических связей, с использованием параметров рабочей характеристики в обращенной форме для каждой вариации координат вычисляют текущие значения двухмерных координат реперов, сопоставляют их с двухмерными координатами образов реперов на изображении и принимают за результирующие координаты текущего репера вариацию трехмерных координат, отвечающую максимуму критерия совпадения.
| СПОСОБ БЕСКОНТАКТНЫХ ИЗМЕРЕНИЙ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2551396C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ГЕОМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ, ПРОВОДИМЫХ С ПОМОЩЬЮ СТЕРЕОСКОПИЧЕСКОГО УСТРОЙСТВА НА ОСНОВЕ ПРИЗМЕННО-ЛИНЗОВОЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 2018 |
|
RU2693532C1 |
| Способ оценивания по реперным точкам угловых и пространственных координат объекта в оптико-электронной системе позиционирования | 2019 |
|
RU2720076C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНОЙ ГЕОМЕТРИИ ВЫПУКЛЫХ И ПРОТЯЖЕННЫХ ОБЪЕКТОВ | 2019 |
|
RU2708940C1 |
| CN 107452024 B, 27.03.2020. | |||

