Изобретение относится к области военно-медицинской и специальной техники, а именно к робототехническим комплексам, предназначенным для дистанционной эвакуации раненых с поле боя и доставки грузов в место дислокации военнослужащих в условиях ведения боевых действий.
Известна платформа Rex 4×4, разработанная израильской компанией IAI Lahav Division (см. https://topwar.ru/66993-nazemnye-roboty-ot-zabrasyvaemyh-sistem-do-bezlyudnyh-transportnyh-kolonn-chast-4.html?ysclid=m0azgn9kai795450635, дата обращения 17.07.2023 г.) и используемая для эвакуации раненых с поля боя. Представляет из себя самоходную роботизированную платформу с дистанционным управлением с грузоподъемностью 250-300 кг. Платформа состоит из корпуса коробчатого типа на четырех колесах, внутри которого установлен дизель-электрический силовой блок, который позволяет передвигаться в режиме малой заметности. На корпусе установлены носилки, на которые размещается раненый человек для эвакуации с поля боя.
Известен японский робот-пожарный (https://novate.ru/blogs/020309/11547, дата обращения 17.07.2024 г.), предназначенный для эвакуации людей с задымленного помещения. Представляет из себя машину на гусеничном ходу, оснащенную четырьмя гусеницами, на которых установлен выдвижной короб, в котором размещается эвакуируемый человек. Робот способен перевозить человека весом до 110 кг, преодолевая любые препятствия.
Известна дистанционно управляемая машина эвакуации THeMIS Cargo CASEVAC (https://milremrobotics.com/product/themis-cargo-casevac, дата обращения 17.07.2024 г.), произведенная эстонской компанией Milrem Robotics, предназначенная для быстрой эвакуации раненых с поля боля. Машина построена на основе двух боковых броневых корпусов с гусеничными движителями, между которыми находится платформа для целевой нагрузки, а носилки расположены над гусеничными движителями.
Известен российский наземный дрон «Кабан» (https://topwar.ru/239281-rossijskim-vojskam-v-zone-specoperacii-napravlena-partija-novyh-nazemnyh-dronov-kaban.html, дата обращения 17.07.2024 г.), предназначенный для доставки груза и эвакуации раненых военнослужащих с поля боя. Наземный дрон состоит из корпуса, который размещен на двух гусеничных движителях, дистанционное управление, при этом он способен нести на себе до 210 кг груза и 220 кг тянуть за собой в качестве буксира.
Известна российская роботизированная платформа Venom TOTEM (https://rob-com.ru/tproduct/480874550-436801237081-venom-totem, дата обращения 17.07.2024 г.), предназначенная для работы в экстремальных условиях и эвакуации пострадавших из труднодоступных мест. Состоит из корпуса, на котором размещены носилки, и которые размещены на двух гусеничных движителях.
Основными недостатками выше представленных роботизированных платформ для эвакуации пострадавших с поля боя являются: необходимость привлечения людей для загрузки раненого на платформу, низкая защищенность эвакуируемого раненого при транспортировке от осколков, FPV-дронов и других поражающих элементов ввиду открытости платформ и отсутствия защиты сверху, низкая проходимость через воронки, ямы и прочие препятствия.
Одной из наиболее сложных задач для военных медицинских служб является эвакуация раненых с поля боя, что существенно затрудняется при интенсивном использовании противником артиллерии и FPV-дронов, при которой медицинская эвакуационная команда попадает под интенсивный обстрел, в результате чего приводит к новым потерям.
Предлагаемое изобретение решает задачи по повышению эффективности эвакуационных мероприятий раненых с поля боя, снижению потерь личного состава, уменьшению риска потерь и ранений среди медицинских эвакуационных команд, а также применению роботизированных комплексов без непосредственного участия личного состава под обстрелом противника или в условиях аварии или чрезвычайных происшествий.
Технический результат заявляемого изобретения заключается в разработке роботизированной платформы транспортировки людей и грузов, обладающей способностью передвигаться по разным типам местности, преодолевая различные препятствия, легкостью управления, легкостью адаптации к любому конкретному для миссии устройству полезной нагрузки, мобильностью, обладающей легкостью загрузки, транспортировки и защищенностью раненого при эвакуации с поля боя.
Для пояснения описываемой роботизированной платформы транспортировки людей и грузов приведены фигуры:
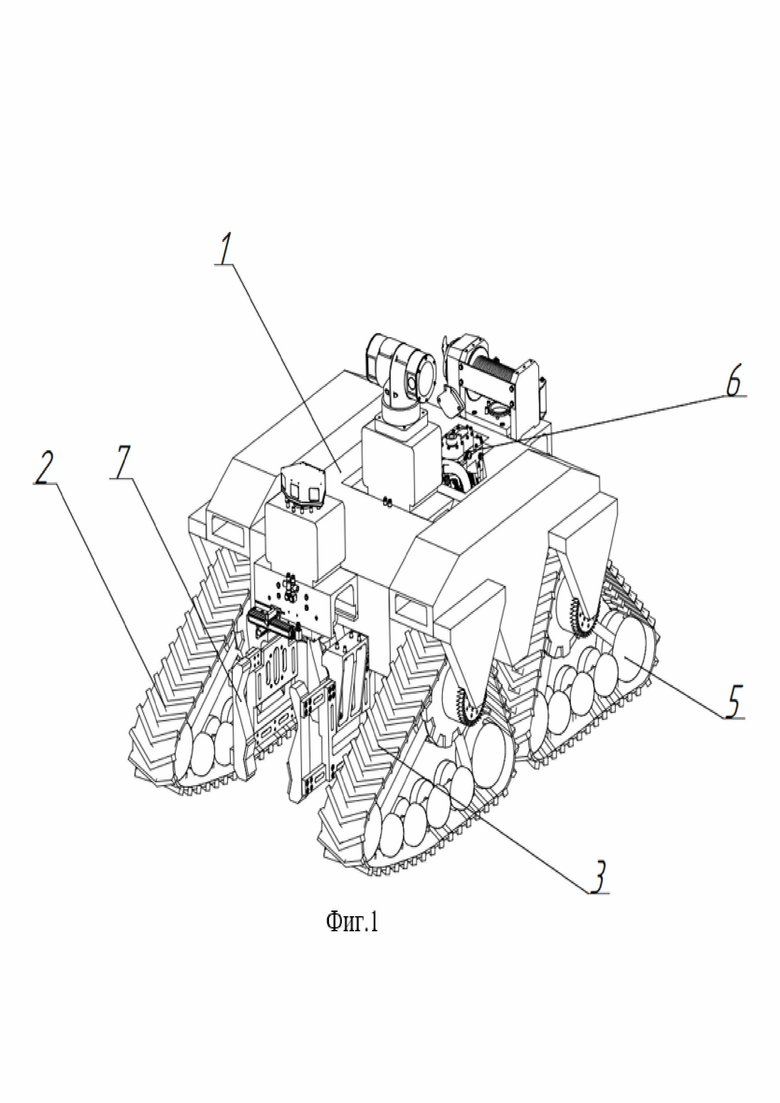
Фиг. 1 – общий вид роботизированной платформы;
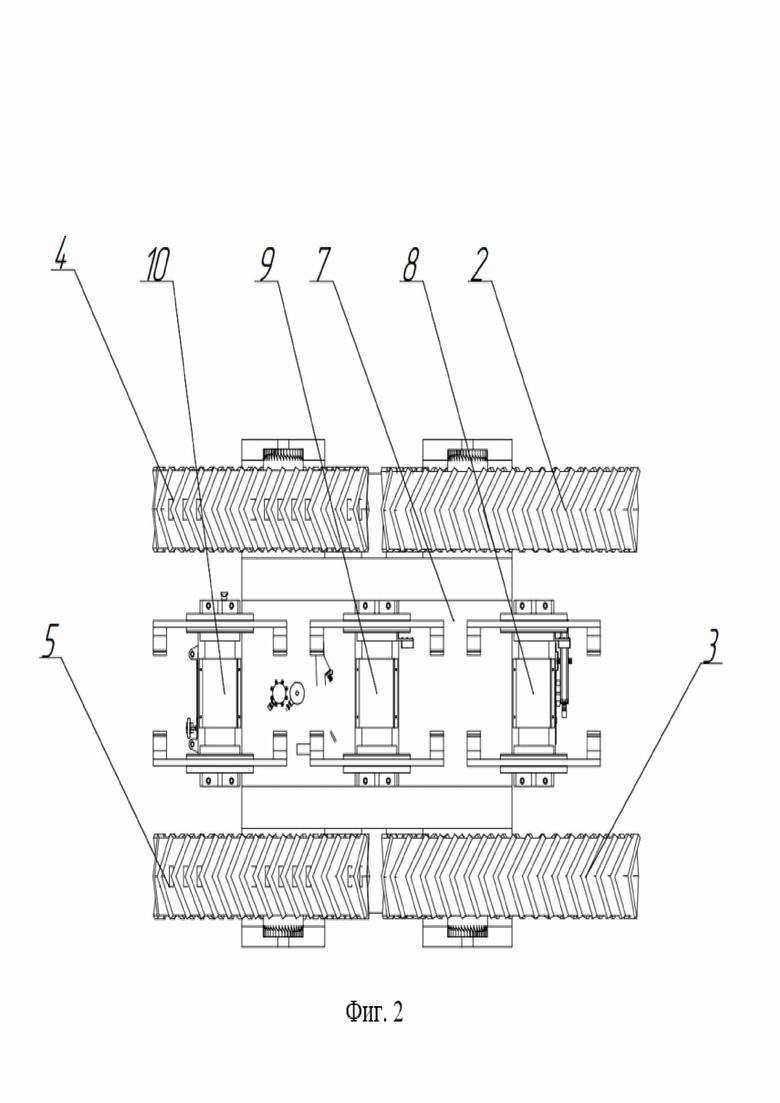
Фиг. 2 – вид роботизированной платформы снизу;
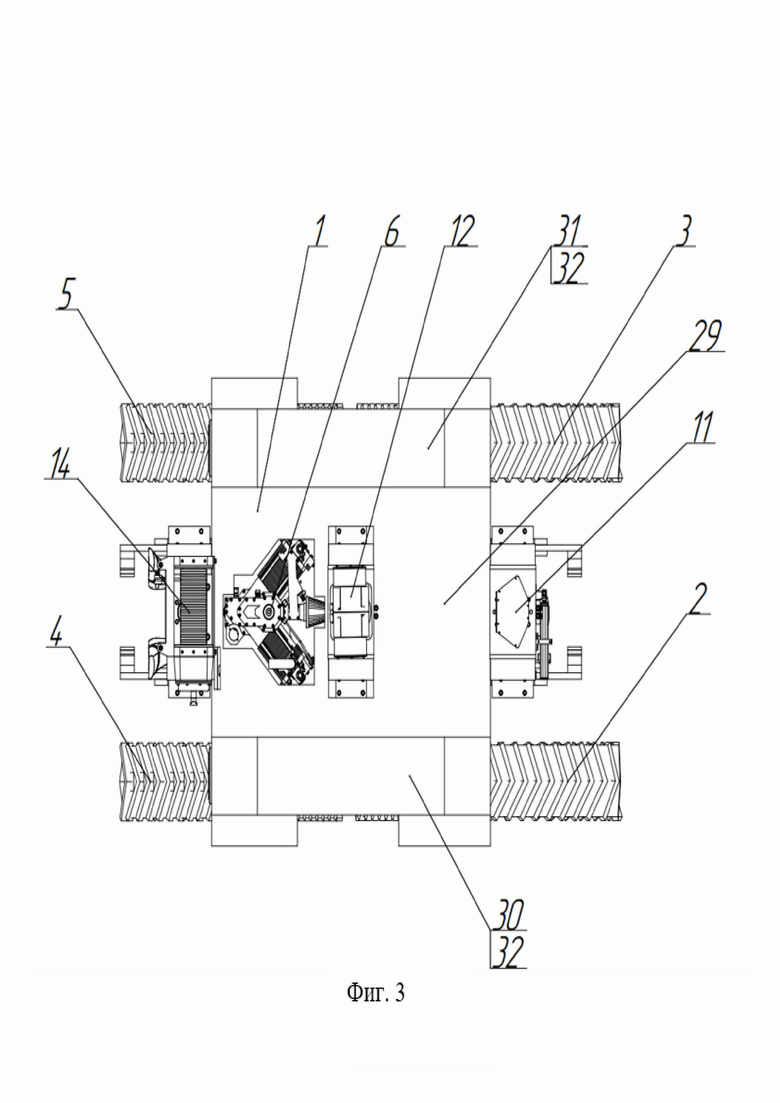
Фиг. 3 – вид роботизированной платформы сверху;
Фиг. 4 – вид роботизированной платформы спереди;
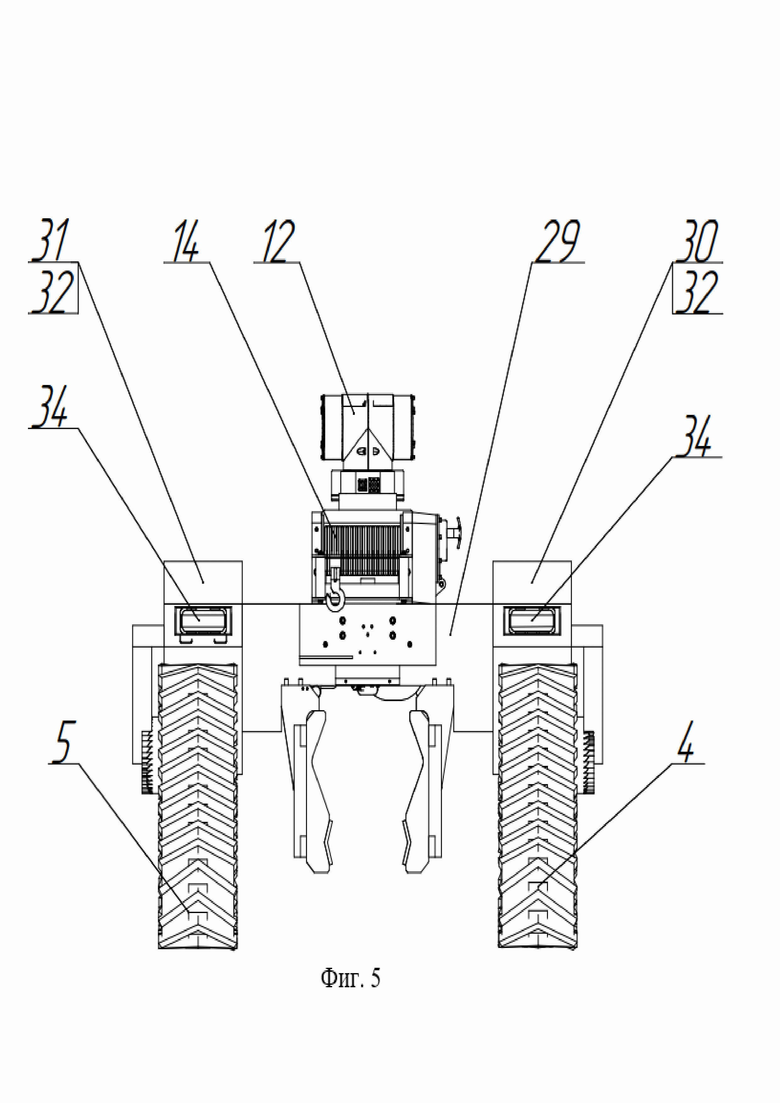
Фиг. 5 – вид роботизированной платформы сзади;
Фиг. 6 – вид роботизированной платформы слева;
Фиг. 7 – вид роботизированной платформы справа;
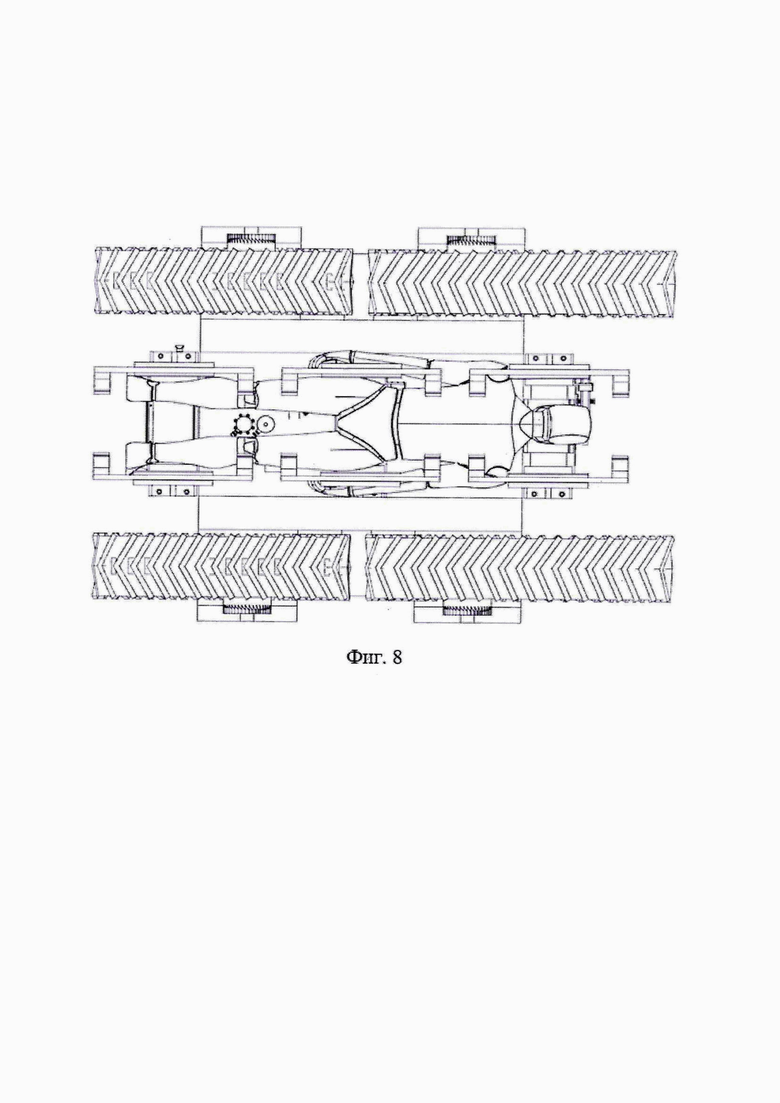
Фиг. 8 – вид роботизированной платформы с эвакуируемым человеком снизу.
Технический результат достигается за счет того, что роботизированная платформа транспортировки людей и грузов состоит из корпуса 1, гусеничного движителя переднего левого 2, гусеничного движителя переднего правого 3, гусеничного движителя заднего левого 4, гусеничного движителя заднего правого 5, генератора постоянного тока с автозапуском 6 и управляемого захвата 7.
Управляемый захват 7 состоит из независимых механических захвата переднего 8, захвата центрального 9 и захвата заднего 10. При этом управляемый захват 7 обладает возможностью захватывать, поддерживать и удерживать раненого во время транспортировки. Управляемый захват 7 находится в нижней части конструкции платформы вдоль гусеничных движителей 2, 3, 4, 5, что обеспечивает надежную фиксацию тела, дополнительную амортизацию в процессе транспортировки и в моменты преодоления препятствий, а также обеспечивает безопасность и дополнительную защиту раненого сверху от поражающих факторов.
На управляемом захвате 7 установлены лидар 11, видеокамера 12, блок электроники 13 и лебедка 14, при этом внутри блока электроники 13 размещены антенна ГЛОНАСС/GPS 15, микрокомпьютер 16, приемо-передатчик видеосигнала 17 и радиомодем 18.
Гусеничные движители передний левый 2 и передний правый 3 состоят из гусеничного полотна 19, ведущего мотор-колеса 20, четырех опорных катков 21, двух направляющих колес 22 и рамы движителя 23, а гусеничные движители задний левый 4 и задний правый 5 состоят из гусеничного полотна 24, ведущего мотор-колеса 25, трех опорных катков 26, двух направляющих колес 27 и рамы движителя 28.
Корпус 1 платформы состоит из основной части корпуса 29, левой части корпуса 30 и правой части корпуса 31, при этом в левой и правой частях корпуса размещены аккумуляторные батареи 32, прожекторы 33 и габаритные огни 34.
Встроенный генератор постоянного тока с автозапуском 6 при низком напряжении аккумуляторных батарей 32 позволяет осуществить непрерывность работы платформы в течение дополнительного времени.
Роботизированная платформа транспортировки людей и грузов работает следующим образом.
Перед началом запуска роботизированной платформы транспортировки людей и грузов оператор проверяет и при необходимости заряжает аккумуляторные батареи 32, размещенные в левой 30 и правой 31 частях корпуса. От аккумуляторных батарей 32 питаются ведущие мотор-колеса 20 гусеничного движителя переднего левого, гусеничного движителя переднего правого и ведущие мотор-колеса 25 гусеничного движителя заднего левого, гусеничного движителя заднего правого, формирующие вращательный момент, передающийся на зубья мотор-колес, находящиеся в сцеплении с цевками гусеничного полотна 19 гусеничного движителя переднего левого, гусеничного движителя переднего правого и гусеничного полотна 24 гусеничного движителя заднего левого, гусеничного движителя заднего правого и тем самым начинает перемещать траки. Таким образом, роботизированная платформа транспортировки людей и грузов начинает перемещение вперед или назад. Также от аккумуляторной батареи 32 питаются все энергопотребляемые составные части роботизированной платформы.
Роботизированная платформа может работать в трех режимах: автономный, полуавтономный и ручной.
В автономном режиме, перед запуском на задание, в микрокомпьютер 16 оператор загружает программу целеуказания, задаются координаты местоположения раненого, и запускается алгоритм работы эвакуации раненого с поля боя (машинное обучение и машинное зрение), и роботизированная платформа едет к раненому.
В полуавтономном режиме роботизированная платформа едет в указанные координаты по программе в режиме радиомолчания, предотвращая тем самым возможность перехвата связи и потери управления платформой, а в момент прибытия платформы к местоположению раненого оператор берет управления платформой на себя для дальнейших эвакуационных действия.
Ручной режим работы подразумевает полный контроль оператора от старта движения платформы до завершения эвакуации раненого с поля боя.
Дистанционное управление оператором осуществляется при помощи пульта управления с видеоизображением.
При этом независимо от режима работы роботизированной платформы процесс захвата раненого одинаковый и происходит следующим образом. Роботизированная платформа подъезжает к раненому и размещается таким образом, чтобы раненый располагался под платформой снизу между гусеничными движителями 2, 3, 4, 5 и под управляемым захватом 7. После принятия роботизированной платформы такого положения механические захват передний 8, захват центральный 9 и захват задний 10 разводятся и опускаются на раненого. После того как раненый оказался внутри области зажимов захватов, они сжимаются и поднимаются вверх, тем самым отрывая раненого от поверхности земли. При этом раненый не обязательно будет находиться в захвате всех трех захватов 8, 9, 10, а может находиться в соседних двух захватах 8, 9 или 9, 10, что определяется телосложением раненого, типом и тяжестью ранения, способностью раненым совершать телодвижения. После захвата раненого роботизированная платформа перемещается в пункт эвакуации.
Лебедка 14 предназначена для перемещения дополнительного груза.
Блок электроники 13 с его составными частями предназначен для управления роботизированной платформы, загрузки целеуказания и обмена данными с оператором.
Заявителем был изготовлен опытный образец роботизированной платформы транспортировки людей и грузов со следующими техническими характеристиками:
– снаряженная масса 500 кг;
– грузоподъемность 500 кг;
– габаритные размеры: длина 2,2 м; ширина 1,5 м; высота 1 м;
– номинальная мощность одного мотор-колеса 8000 Вт;
– максимальная скорость 80 км/ч при нормальных условиях;
– аккумуляторная батарея 53,36 кВт/ч;
– время работы на одном заряде 1,67 часа;
– время работы с генератором 2,23 часа.
Предложенная роботизированная платформа транспортировки людей и грузов и его составные части могут быть изготовлены из унифицированных, стандартизированных и покупных составных частей, доступных на отечественном рынке, а также деталей с применением твердых материалов, изготовленных на известном технологическом оборудовании в заводских условиях.
Предложенная роботизированная платформа транспортировки людей и грузов может использоваться военными, медицинскими службами, специальными подразделениями, спасателями МЧС для дистанционной эвакуации раненых или покалеченных в результате аварий и чрезвычайных ситуаций людей, доставки грузов в труднодоступные места.
| название | год | авторы | номер документа |
|---|---|---|---|
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| ЭВАКУАЦИОННЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2023 |
|
RU2824684C1 |
| ПРОТИВОТАНКОВАЯ МИНА РОБОТИЗИРОВАННАЯ | 2023 |
|
RU2823707C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОЙ ЭВАКУАЦИИ НА БАЗЕ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2024 |
|
RU2838648C1 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО ПЕРЕМЕЩЕНИЯ | 2017 |
|
RU2643059C1 |
| МОНОГУСЕНИЦА | 2022 |
|
RU2779126C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2023 |
|
RU2813930C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЭВАКУАЦИИ РАНЕНЫХ И ПОРАЖЕННЫХ | 2023 |
|
RU2829664C1 |



Изобретение относится к области военно-медицинской и специальной техники, а именно к робототехническим комплексам, предназначенным для дистанционной эвакуации раненых с поля боя и доставки грузов в место дислокации военнослужащих в условиях ведения боевых действий. Роботизированная платформа транспортировки людей и грузов состоит из корпуса (1), гусеничного движителя переднего левого (2), гусеничного движителя переднего правого (3), гусеничного движителя заднего левого (4), гусеничного движителя заднего правого (5), генератора постоянного тока с автозапуском (6) и управляемого захвата (7). Достигается повышение эффективности эвакуационных мероприятий раненых с поля боя, снижение потерь личного состава, уменьшение риска потерь и ранений среди медицинских эвакуационных команд, а также применение роботизированных комплексов без непосредственного участия личного состава под обстрелом противника или в условиях аварии или чрезвычайных происшествий. 8 ил.
Роботизированная платформа транспортировки людей и грузов, состоящая из корпуса, гусеничного движителя переднего левого, гусеничного движителя переднего правого, гусеничного движителя заднего левого, гусеничного движителя заднего правого, генератора постоянного тока с автозапуском и управляемого захвата, находящегося в нижней части конструкции платформы вдоль гусеничных движителей и состоящего из независимых механических захвата переднего, захвата центрального, захвата заднего, при этом на управляемом захвате установлены лидар, видеокамера, лебедка и блок электроники, в котором размещены антенна ГЛОНАСС/GPS, микрокомпьютер, приемо-передатчик видеосигнала и радиомодем, а корпус платформы состоит из основной части корпуса, левой части корпуса и правой части корпуса, при этом в левой и правой частях корпуса размещены аккумуляторные батареи, прожекторы и габаритные огни, а гусеничный движитель передний левый, гусеничный движитель передний правый состоят из гусеничного полотна, ведущего мотор-колеса, четырех опорных катков, двух направляющих колес и рамы движителя, а гусеничный движитель задний левый, гусеничный движитель задний правый состоят из гусеничного полотна, ведущего мотор-колеса, трех опорных катков, двух направляющих колес и рамы движителя.
| УНИВЕРСАЛЬНАЯ ГУСЕНИЧНАЯ ПЛАТФОРМА | 2024 |
|
RU2826589C1 |
| Наземный роботизированный комплекс | 2023 |
|
RU2819223C1 |
| Транспортная система наземной доставки людей и грузов с поля и на поле боя | 2024 |
|
RU2828498C1 |
| 0 |
|
SU217341A1 | |
| ЭВАКУАЦИОННЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2023 |
|
RU2824684C1 |
| РАСКАТНИК СТЕКЛА | 0 |
|
SU206017A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ РАЗРЫВА ТЯГОВОГО КАНАТА НА ДОРОГАХ С КАНАТНОЙ ТЯГОЙ | 1933 |
|
SU36618A1 |

