Область техники, к которой относится настоящее изобретение
[0001] Настоящее изобретение относится к области соединительных конструкций для узлов механической передачи, в частности, к шкиву и руке-манипулятору.
Предшествующий уровень техники настоящего изобретения
[0002] Медицинские микрохирургические инструменты широко используются при хирургических операциях всех типов благодаря своим преимуществам, которые включают в себя точность позиционирования, устойчивость работы, манипуляционные возможности, широкий рабочий диапазон, отсутствие опасности радиационного излучения и заражения и т.п. Во время проведения операции задействуется множество механических рук-манипуляторов, которые контролируемым образом переводятся в требуемое положение над телом пациента, а затем проводят операцию через отверстие, предварительно сделанное на коже тела пациента. Механическая рука-манипулятор соединена с рабочим органом стальными тросиками или стальными ремнями таким образом, что рабочий орган проходит через отверстие на коже тела пациента и свободно вращается вокруг определенной точки в этом отверстии.
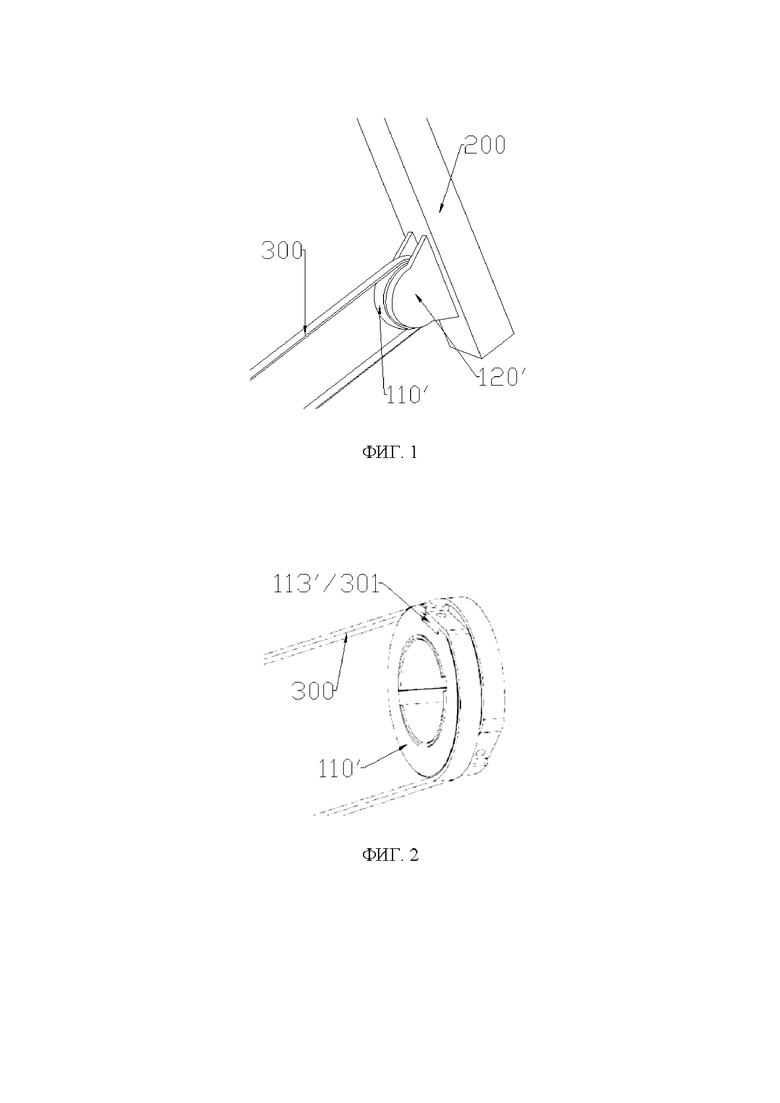
[0003] В общем, в приводном механизме ремней используются ремни и шкивы, которые выполнены из нержавеющей стали и обладают сверхвысокой прочностью и компактностью. Ремень обычно соединяет шкив через соединитель определенной длины. В соответствии со стандартным решением для вращения шкива на 90 градусов, как по часовой стрелке, так и против часовой стрелки, как это показано на фиг.2, предусмотрено два стальных ремня (ремни 300), которые наматываются на шкив 110' в противоположных направлениях. Каждый ремень соединяется со шкивом через соединитель 301, а затем проходит дальше, обматываясь вокруг наружной границы шкива. Два ремня проходят параллельно друг другу и со смещением относительно друг друга в направлении толщины шкива таким образом, что два ремня наматываются на шкив 110' под углом 90 градусов в противоположных направлениях. Соответственно, шкив 110' должен иметь толщину, равную или превышающую сумму значений ширины двух ремней во избежание перехлеста двух ремней и взаимного мешающего воздействия двух ремней. Соединитель 301 заходит в паз 113', отходящий внутрь от наружной границы шкива, чтобы не мешать соединителю и внутренним частям механической руки-манипулятора во время вращения шкива. При этом гарантируется, что если потянуть за соединитель 301, то это не приведет к его отсоединению от шкива 110' во время поворота шкива по часовой стрелке и против часовой стрелки на 90 градусов. В общем, чем больше угол, под которых ремень 300 обмотан вокруг шкива 110', тем большее трение возникает между ремнем 300 и шкивом 110', что приводит, соответственно, к уменьшению натяжения ремня 300 и, таким образом, к повышению запаса прочности.
[0004] Во время операции может быть задействовано множество механических рук-манипуляторов. Вследствие небольшого размера отверстия, предварительно сделанного на коже тела пациента, в общем, желательно, чтобы механическая рука-манипулятор обладала сверхкомпактной конструкцией и была достаточно тонкой, чтобы механические руки-манипуляторы не мешали друг другу в условиях ограниченного пространства. Обычно сочленение, которое соединяет между собой механическую руку-манипулятор и рабочий орган, включает в себя внутренний выступ, неподвижно закрепленный на рабочем органе. Как показано на фиг. 1, внутренний выступ включает в себя две накладки 120', соединяющие рабочий орган (рабочий блок 200) и шкив 110'. Шкив 110' неподвижно соединен с накладками 120', которые выполнены заодно с рабочим блоком. Таким образом, шкив 110' прикреплен к рабочему блоку 200 таким образом, что рабочий блок 200 поворачивается на такой же угол, что и шкив 110'. Согласно этому техническому решению накладки 120' и шкив 110' соединены друг с другом и вставлены в наружный выступ механической руки-манипулятора. Накладки 120' и шкив 110' шарнирно соединены с наружным выступом посредством штифта, что обеспечивает соединение между рабочим органом и концом механической руки-манипулятора. Конец механической руки-манипулятора характеризуется толщиной, которая представляет собой, по меньшей мере, сумму значений толщины наружного выступа, накладок 120' и шкива 110'. При этом сложно минимизировать толщину механической руки-манипулятора одновременно с максимальным повышением прочности механической руки-манипулятор а и рабочего органа, и поэтому между этими двумя требованиями необходимо выбрать оптимальное соотношение.
[0005] Следовательно, требуется обеспечить компактную конструкцию, в которой шкив соединяется с рабочим блоком.
Краткое раскрытие настоящего изобретения
[0006] Цель настоящего изобретения заключается в том, чтобы предложить шкив и конструкцию, содержащую шкив, который соединен с рабочим блоком, с целью устранения противоречия между минимизацией толщины и максимальным повышением прочности соединения между рабочим органом и механической рукой-манипулятором с тем, чтобы обеспечить, соответственно, небольшую толщину и высокую прочность.
[0007] Для решения указанной задачи вариантами осуществления настоящего изобретения предложены решения, описанные ниже.
[0008] Предложен шкив, который включает в себя колесообразную часть и выступающую часть. Колесообразная часть включает в себя две круговые торцевые поверхности, расположенные напротив друг друга, и боковую поверхность, соединяющую между собой две торцевые поверхности. Боковая поверхность включает в себя грань главной дуги и грань ответвляющейся дуги. Грань ответвляющейся дуги характеризуется наличием переднего конца, соединенного с гранью главной дуги, и заднего конца, выполненного с возможностью подсоединения ремня. В осевом направлении колесообразной части грань ответвляющейся дуги характеризуется шириной, которая меньше ширины грани главной дуги. Грань ответвляющейся дуги и грань главной дуги образуют непрерывную круговую дугообразную поверхность, по которой движется ремень. Выступающая часть неподвижно соединена с колесообразной частью. Выступающая часть располагается в положении, примыкающем к грани ответвляющейся дуги по ширине грани главной дуги, и далее выходит за грань ответвляющейся дуги в радиальном направлении колесообразной части. Выступающая часть выполнена с возможностью соединения шкива с рабочим блоком.
[0009] В одном из вариантов осуществления настоящего изобретения выступающая часть включает в себя первую торцевую поверхность, примыкающую к грани ответвляющейся дуги и перпендикулярную ей; вторую торцевую поверхность напротив первой торцевой поверхности; первую боковую поверхность, соединяющую первую торцевую поверхность и вторую торцевую поверхность, и отходящую от грани главной дуги; верхнюю поверхность, соединяющую первую торцевую поверхность и вторую торцевую поверхность, и располагающуюся поверх шкива; и вторую боковую поверхность, располагающуюся выше грани ответвляющейся дуги и соединяющуюся с верхней поверхностью. Верхняя поверхность выполнена с возможностью прикрепления к поверхности рабочего блока.
[0010] В одном из вариантов осуществления настоящего изобретения на заднем конце грани ответвляющейся дуги располагается камера соединителя, выполненная с возможностью приема и удержания соединителя ремня, соединенного с ремнем.
[0011] В одном из вариантов осуществления настоящего изобретения камера соединителя включает в себя внутреннюю полость и приемную щель, размеры которой меньше размеров внутренней полости, причем приемная щель открыта в сторону грани ответвляющейся дуги.
[0012] В одном из вариантов осуществления настоящего изобретения приемная щель характеризуется наличием верхней поверхности, соединяющейся со второй боковой поверхностью, причем верхняя поверхность располагается над камерой соединителя и отстоит от камеры соединителя на определенное расстояние.
[0013] В одном из вариантов осуществления настоящего изобретения предусмотрено две грани ответвляющейся дуги и две грани главной дуги, а шкив выполнен симметрично вращающимся относительно радиального направления колесообразной части.
[0014] В одном из вариантов осуществления настоящего изобретения каждая из двух граней ответвляющейся дуги характеризуется центральным углом, превышающим 90°.
[0015] В одном из вариантов осуществления настоящего изобретения грань главной дуги характеризуется центральным углом в 180°, причем ширина каждой из двух граней ответвляющейся дуги соответствует половине грани главной дуги, и две грани ответвляющейся дуги частично заходят друг за друга в осевом направлении колесообразной части и совместно используют грань главной дуги.
[0016] В одном из вариантов осуществления настоящего изобретения первая боковая поверхность выступающей части плавно переходит в грань главной дуги.
[0017] Настоящим изобретением предложена конструкция, включающая в себя рабочий блок и шкив согласно любому из указанных выше вариантов осуществления настоящего изобретения. Шкив соединен с рабочим блоком посредством выступающей части.
[0018] В одном из вариантов осуществления настоящего изобретения рабочим блоком служит рабочий орган механической руки-манипулятора.
[0019] В сравнении с предшествующим уровнем техники в шкиве и конструкции, содержащей шкив и рабочий блок, соединенные друг с другом, согласно вариантам осуществления настоящего изобретения шкив, выполненный в виде единого целого, обладает более простой конструкцией, в которой усовершенствована колесообразная часть для намотки ремня, а на колесообразной части предусмотрена дополнительная выступающая часть, причем шкив прикреплен к рабочему блоку посредством выступающий части, выполненной заодно с колесообразной частью таким образом, что можно пренебречь такими компонентами, как накладки внутреннего выступа, используемые в существующей технологии. Таким образом, уменьшается толщина соединения шкива и обеспечивается компактная конструкция, содержащая шкив и рабочий блок, что приводит к уменьшению размеров и снижению веса механической руки-манипулятора и, соответственно, к повышению точности работы во время хирургических вмешательств.
Краткое описание чертежей
[0020] Для более наглядной иллюстрации технических решений, реализованных в вариантах осуществления настоящего изобретения, ниже вкратце представлены прилагаемые чертежи, иллюстрирующие варианты осуществления заявленного изобретения. Следует иметь в виду, что прилагаемые чертежи в последующем описании отображают лишь некоторые варианты осуществления настоящего изобретения, и специалисты в данной области техники могут вывести чертежи, отличные от прилагаемых чертежей, не прилагая каких-либо творческих усилий.
[0021] На фиг. 1 представлено схематическое изображение, иллюстрирующее соединение между шкивом и рабочим блоком по существующей технологии.
[0022] На фиг. 2 представлено схематическое изображение, иллюстрирующее соединение между шкивом и ремнем по существующей технологии.
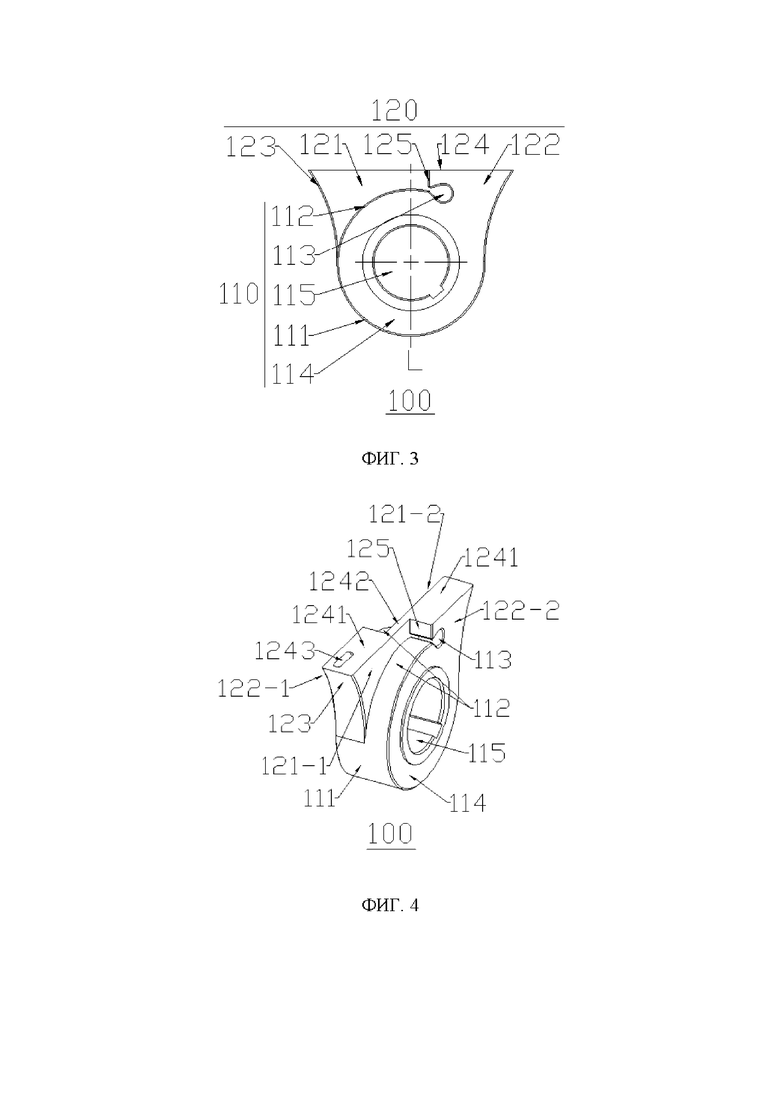
[0023] На фиг. 3 показан вид спереди шкива согласно одному из вариантов осуществления настоящего изобретения.
[0024] На фиг. 4 представлено перспективное изображение шкива согласно одному из вариантов осуществления настоящего изобретения.
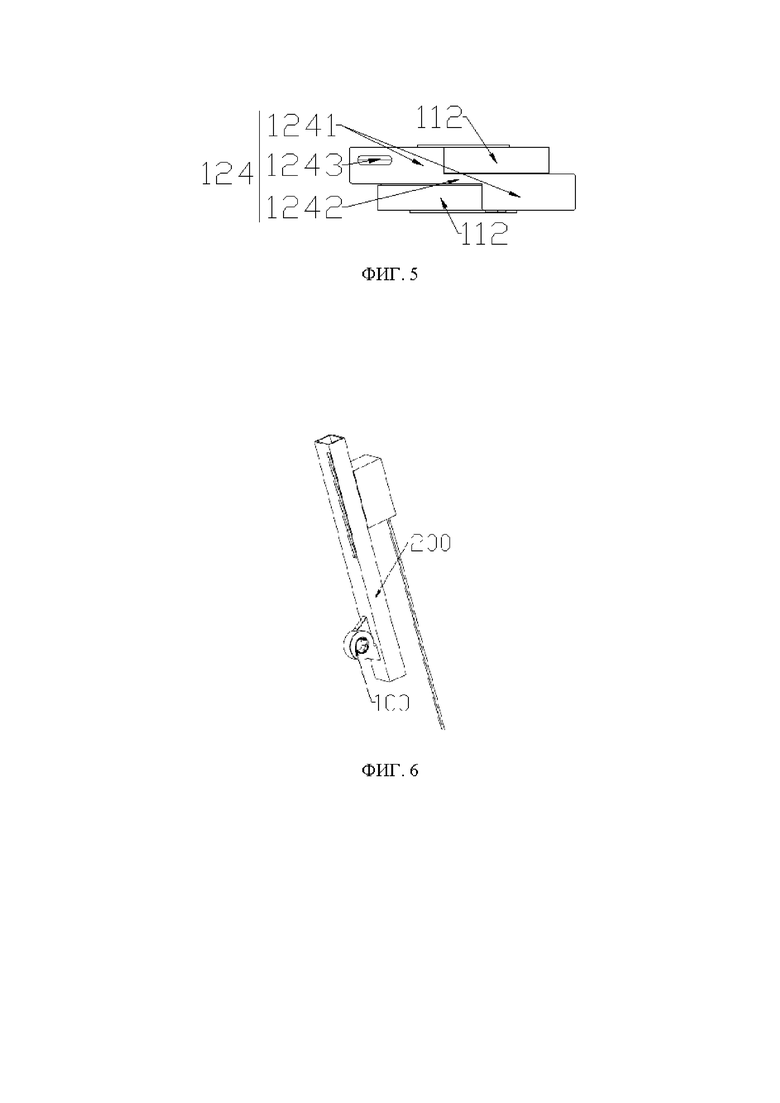
[0025] На фиг. 5 показан вид сверху шкива согласно одному из вариантов осуществления настоящего изобретения.
[0026] На фиг. 6 представлено схематическое изображение, иллюстрирующее конструкцию, содержащую шкив и рабочий блок, соединенные друг с другом, согласно одному из вариантов осуществления настоящего изобретения.
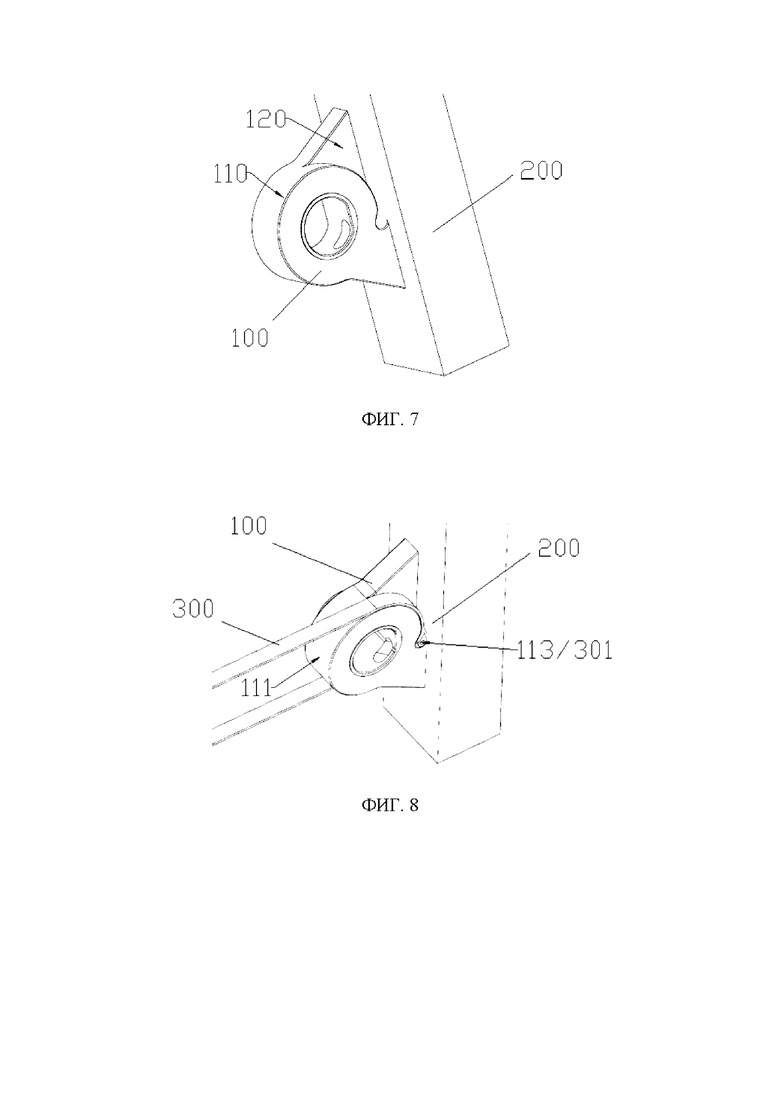
[0027] На фиг. 7 показан частичный вид конструкции согласно одному из вариантов осуществления настоящего изобретения.
[0028] На фиг. 8 показан частичный вид конструкции с установленным на ней ремнем согласно одному из вариантов осуществления настоящего изобретения.
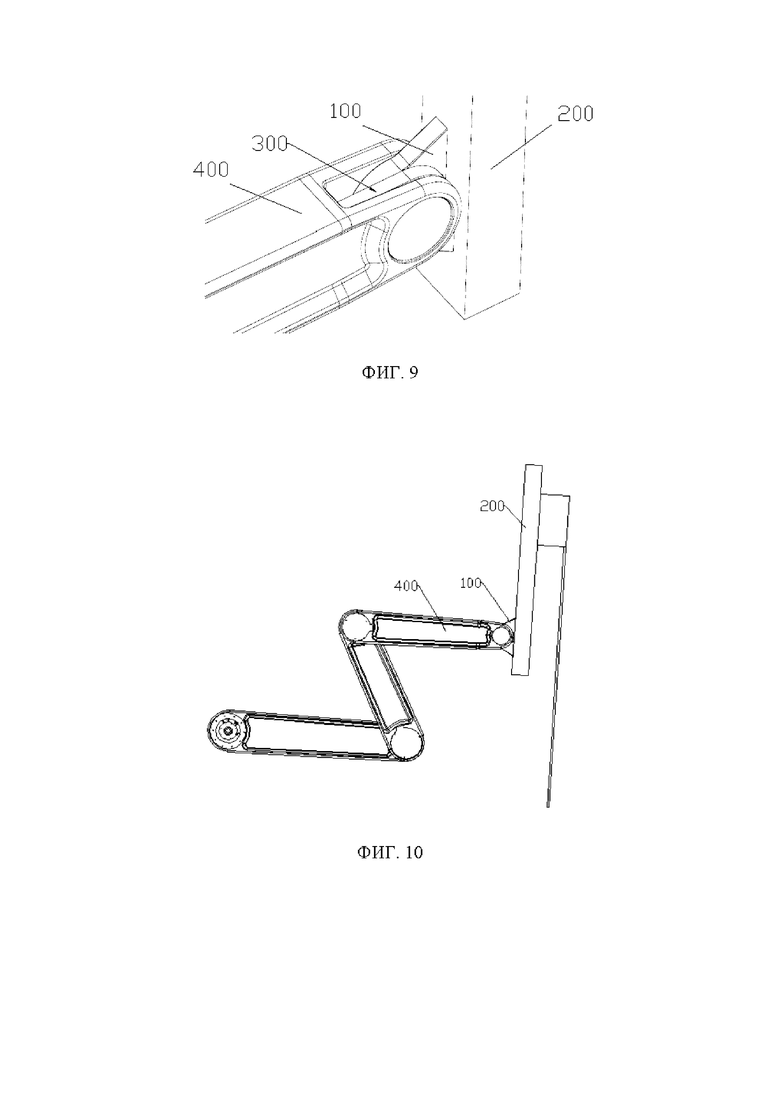
[0029] На фиг. 9 показан частичный вид конструкции, соединенной со звеном механической руки-манипулятор а, согласно одному из вариантов осуществления настоящего изобретения.
[0030] На фиг. 10 представлено схематическое изображение, иллюстрирующее механическую руку-манипулятор, содержащую конструкцию согласно одному из вариантов осуществления настоящего изобретения.
[0031] Ниже перечислены ссылочные позиции:
[0032] шкив 100, колесообразная часть 110, грань 111 главной дуги, грань 112 ответвляющейся дуги, камера 113 соединителя, круговая торцевая поверхность 114, монтажное отверстие 115, выступающая часть 120, первая торцевая поверхность 121, первая торцевая поверхность слева 121-1, первая торцевая поверхность справа 121-2, вторая торцевая поверхность 122, вторая торцевая поверхность слева 122-1, вторая торцевая поверхность справа 122-2, первая боковая поверхность 123, верхняя поверхность 124, основная соединительная поверхность 1241, промежуточная соединительная поверхность 1242, отверстие 1243 для проводов, вторая боковая поверхность 125, рабочий блок 200, ремень 300, соединитель 301 ремня, корпус 400 механической руки-манипулятора, шкив 110', паз 113' и накладки 120'.
Подробное раскрытие настоящего изобретения
[0033] В последующем описании в качестве примеров раскрыто несколько вариантов осуществления настоящего изобретения. Следует иметь в виду, что могут быть разработаны и другие варианты осуществления заявленного изобретения с изменениями, внесенными в механическую часть, конструкцию, электрическую часть и функционирование без отступления от сущности и объема настоящего изобретения. Предполагается, что последующее подробное описание не ограничивает заявленное изобретение, а объем вариантов его осуществления ограничен только формулой изобретения.
[0034] Все указания на направление (такие как верхний, нижний, левый, правый, передний, задний и пр.) в вариантах осуществления настоящего изобретения используются исключительно для описания относительного взаимного расположения, ситуаций движения и прочего в отношении компонентов, находящихся в определенной позиции (как показано на чертежах), и они соответствующим образом изменяются при изменении конкретной позиции.
[0035] В контексте настоящего документа выражения, содержащие термины «первый», «второй» и прочие термины подобного рода, используются исключительно в описательных целях, и не должны трактоваться как обозначающие или предполагающие их относительную значимость или указывающие на порядковый номер обозначенного технического признака. Таким образом, признаки, определенные терминами «первый» и «второй», могут явно или неявно включать в себя, по меньшей мере, один из таких признаков.
[0036] В контексте настоящего документа, если не указано и не задано иное, предусмотрено, что термины «соединен», «прикреплен» и прочие термины подобного рода должны пониматься в широком смысле; например, выражение, связанное с каким-либо соединением, может относиться к неподвижному соединению, разъемному соединению или цельной соединительной конструкции, может обозначать механическое соединение или электрическое соединение, прямое соединение или опосредованное соединение с промежуточным элементом, может описывать связь между внутренними областями двух компонентов или взаимодействие между двумя компонентами. Для специалистов в данной области техники конкретное значение указанных терминов в настоящем документе может рассматриваться индивидуально для каждого отдельного случая.
[0037] Кроме того, технические решения, реализованные в различных вариантах осуществления настоящего изобретения, могут быть объединены друг с другом, исходя из их пригодности для практического использования специалистами в данной области техники. Комбинации, которые вызывают противоречия, должны считаться несуществующими, и они не входят в объем правовой охраны, заявленный настоящим изобретением.
[0038] Цель настоящего изобретения заключается в том, чтобы предложить шкив и конструкцию, включающую в себя такой шкив, соединенный с рабочим блоком, для разрешения противоречия между минимизацией толщины и максимальным повышением прочности соединения между рабочим органом и механической рукой-манипулятором с тем, чтобы обеспечить, соответственно, небольшую толщину и высокую прочность.
[0039] Как показано на фиг. 3-5, одним из вариантов осуществления настоящего изобретения предложен шкив 100, включающий в себя колесообразную часть 110 и выступающую часть 120. Колесообразная часть 110 выполнена по существу цилиндрической и включает в себя две противоположные круговые торцевые поверхности 114 и боковую поверхность, соединяющую две торцевые поверхности 114. Боковая поверхность включает в себя грань 111 главной дуги и, по меньшей мере, одну грань 112 ответвляющейся дуги. Грань 112 ответвляющейся дуги характеризуется наличием переднего конца, соединенного с гранью 111 главной дуги. В осевом направлении колесообразной части грань 112 ответвляющейся дуги характеризуется шириной, которая меньше ширины грани 111 главной дуги. Грань 112 ответвляющейся дуги и грань 111 главной дуги образуют непрерывную круговую дугообразную поверхность. Выступающая часть 120 неподвижно соединена с колесообразной частью 110 и располагается в положении, примыкающем к грани 112 ответвляющейся дуги по ширине грани 111 главной дуги, и далее выходит за грань 112 ответвляющейся дуги в радиальном направлении колесообразной части 110.
[0040] Как показано на фиг. 8, грань 112 ответвляющейся дуги в шкиве 100 дополнительно включает в себя задний конец, выполненный с возможностью подсоединения ремня 300, который движется по непрерывной круговой дугообразной поверхности, образованной гранью 112 ответвляющейся дуги и гранью 111 главной дуги. Выступающая часть 120 выполнена с возможностью соединения шкива 100 с рабочим блоком 200.
[0041] В этом варианте осуществления настоящего изобретения главная дугообразная поверхность 111 и грань 112 ответвляющейся дуги образуют непрерывную круговую дугообразную поверхность, вокруг которой обматывается ремень 300. В сравнении со стандартным шкивом, который выполнен исключительно в форме колеса, шкив согласно настоящему изобретению включает в себя не только колесообразную часть 11, которая выполнена по существу цилиндрической и содержит главную дугообразную поверхность 111 и грань 112 ответвляющейся дуги, но и выступающую часть 120, которая отходит от колесообразной части 11 и выполнена с возможностью прикрепления к рабочему блоку. В сравнении с существующей технологией настоящим изобретением предложен шкив, выполненный в виде единого целого и обладающий более простой конструкцией, в которой усовершенствована колесообразная часть 110 для намотки ремня 300, а на колесообразной части 110 предусмотрена дополнительная выступающая часть 120, причем шкив 100 прикреплен к рабочему блоку 200 посредством выступающий части 120, выполненной заодно с колесообразной частью 110 таким образом, что можно пренебречь такими компонентами, как накладки 120' внутреннего выступа, показанные на фиг. 1. Таким образом, уменьшается толщина соединения шкива 100 и обеспечивается компактная конструкция, содержащая шкив 100 и рабочий блок 200, что приводит к уменьшению размеров и снижению веса механической руки-манипулятора и, соответственно, к повышению точности работы во время хирургических вмешательств.
[0042] В одном из вариантов осуществления настоящего изобретения выступающая часть 120 включает в себя первую торцевую поверхность 121, примыкающую к грани 112 ответвляющейся дуги и расположенную перпендикулярно ей; вторую торцевую поверхность 122, противоположную первой торцевой поверхности 121; первую боковую поверхность 123, соединяющую первую торцевую поверхность 121 и вторую торцевую поверхность 122, и отходящую от грани 111 главной дуги; верхнюю поверхность 124, соединяющую первую торцевую поверхность 121 и вторую торцевую поверхность 122, и расположенную поверх шкива 100; и вторую боковую поверхность 125, расположенную над гранью 112 ответвляющейся дуги и соединяющуюся с верхней поверхностью 124. Верхняя поверхность 124, например, является плоской, и она выполнена с возможностью прикрепления к поверхности (которая, например, также является плоской) рабочего блока 200 таким образом, что шкив 100 неподвижно соединяется с рабочим блоком 200. К примеру, верхняя поверхность 124 прикреплена к плоской поверхности основного плеча рабочего блока 200 посредством механического соединения или методом сварки, или же она выполнена в виде единого целого с основным плечом рабочего блока 200.
[0043] В этом варианте осуществления настоящего изобретения, который отличается разумной конструкцией выступающей части 120, шкив 100 соединен с рабочим блоком 200 путем соединения двух плоских поверхностей, тогда как в существующей технологии соединение между шкивом и рабочим блоком реализуется путем вставки шкива между двумя накладками рабочего блока, и при длительной эксплуатации оно может ослабнуть. Решение, реализованное в описываемом варианте осуществления настоящего изобретения, предотвращает возникновение такой проблемы при длительной эксплуатации и, таким образом, повышает надежность соединения.
[0044] В одном из вариантов осуществления настоящего изобретения на заднем конце грани 112 ответвляющейся дуги располагается камера 113 соединителя, выполненная с возможностью приема и удержания соединителя 301 ремня, который соединен с ремнем 300. Например, соединитель 301 ремня соответствует по своей форме камере 113 соединителя. Камера 113 соединителя включает в себя внутреннюю полость и приемную щель, размеры которой меньше размеров внутренней полости, причем приемная щель открыта в сторону грани 112 главной дуги. В одном из частных вариантов осуществления настоящего изобретения соединитель 301 ремня заходит в камеру 113 соединителя, а сам ремень 300 выходит из камеры 113 соединителя через приемную щель, проходит далее и движется по грани 112 ответвляющейся дуги.
[0045] В этом варианте осуществления настоящего изобретения предусмотрена камера 113 соединителя с большой внутренней полостью и небольшой приемной щелью для подсоединения соединителя 301 ремня без необходимости использования каких-либо дополнительных крепежных деталей, таких как винты, что упрощает подсоединение соединителя ремня и способствует получению разумной конструкции выступающей части 120, расположенной на колесообразной части 110.
[0046] В одном из вариантов осуществления настоящего изобретения приемная щель камеры 113 соединителя характеризуется наличием верхней поверхности, соединяющейся со второй боковой поверхностью 125, а верхняя поверхность 124 располагается над камерой 113 соединителя и отстоит от камеры 113 соединителя на определенное расстояние. Таким образом, за счет такой простой конструкции эффективно гарантируется, что соединитель ремня и механическая рука-манипулятор или рабочий блок 200 не будут мешать друг другу во время работы.
[0047] В одном из вариантов осуществления настоящего изобретения шкив 100 выполнен симметрично-вращающимся относительно радиального направления колесообразной части 110 (т.е. штриховой линии L, показанной на фиг. 3). Каждая из левой и правой сторон шкива 100 включает в себя грань 112 ответвляющейся дуги, камеру 113 соединителя и выступающую часть 120, обеспечивая соединения двух ремней 300 со шкивом и их движение в противоположных направлениях. В частности, первые торцевые поверхности 121 (т.е. первая торцевая поверхность 121-1 слева и первая торцевая поверхность 121-2 справа, показанные на фиг. 4), вторые торцевые поверхности 122 (т.е. вторая торцевая поверхность 122-1 слева и вторая торцевая поверхность 122-2 справа, показанные на фиг. 4) и вторые боковые поверхности 125 (не обозначены отдельными номерами позиций) двух выступающих частей 120 также выполнены симметрично-вращающимися. Симметрично-вращающаяся конструкция позволяет подсоединять ремни 300 с обеих сторон, что способствует уравновешиванию сил.
[0048] В одном из вариантов осуществления настоящего изобретения каждая из двух граней 112 ответвляющейся дуги характеризуется центральным углом, превышающим 90°, вследствие чего шкив 100 приводится во вращение ремнями 300, как по часовой стрелке, так и против часовой стрелки более чем на 90°. В одном из вариантов осуществления настоящего изобретения грань 111 главной дуги характеризуется центральным углом в 180°. Ширина каждой из двух граней 112 ответвляющейся дуги равна половине ширины грани 111 главной дуги. Две грани 112 ответвляющейся дуги частично заходят друг за друга в осевом направлении колесообразной части 110 и совместно используют грань 111 главной дуги. Таким образом, колесообразная часть 110 обладает простой конструкцией. В одном из вариантов осуществления настоящего изобретения первая боковая поверхность 123 выступающей части 120 плавно переходит в грань 111 главной дуги и проходит в направлении, обращенном в сторону от грани 111 главной дуги, отходя вверх от плоскости, проходящей по касательной к грани 111 главной дуги, в точке соединения между гранью 111 главной дуги и первой боковой поверхностью 123. Таким образом, шкив 100 имеет плавное очертание, а область соединения между шкивом 100 и рабочим блоком 200 увеличена. В одном из вариантов осуществления настоящего изобретения верхняя поверхность 124 включает в себя основные соединительные поверхности 1241, по одной с каждой стороны, и промежуточную соединительную поверхность 1242, соединяющую между собой две основные соединительные поверхности 1241. В одном из вариантов осуществления настоящего изобретения предусмотрено отверстие 1243 для проводов, открытое на верхней поверхности 124 и выполненное с возможностью пропускания через него проводов, заходящих в рабочий блок 200. Отверстие 1243 для проводов проходит через внутреннюю стенку колесообразной части 110, сообщаясь с монтажным отверстием 115, которое задано внутренней стенкой. В одном из вариантов осуществления настоящего изобретения монтажное отверстие 115 проходит через две круговые торцевые поверхности в осевом направлении колесообразной части 110. Монтажное отверстие 115 обеспечивает возможность вставки в него вращающегося вала механической руки-манипулятора.
[0049] В приведенных выше вариантах осуществления настоящего изобретения шкив 100 за счет взаимодействия выступающей части 120 и соединителя может обеспечить соединение между соединителем и выступающей частью 120 и нормальную намотку ремня, а рабочий блок 200 выполнен с возможностью поворота на большой угол с приводом от шкива 100. При этом уменьшена толщина механической руки-манипулятора и повышена прочность соединения между механической рукой-манипулятором и рабочим органом. Кроме того, при последующей установке механической руке-манипулятору ничего не мешает.
[0050] Как показано на фиг. 6-10, одним из вариантов осуществления настоящего изобретения предложена конструкция, включающая в себя шкив и рабочий блок, которые соединены друг с другом. Шкив 100 соединен с рабочим блоком 200 посредством выступающей части 120. Например, выступающая часть 120 может быть прикреплена к рабочему блоку 200 с помощью механического соединения или методом сварки, или же она может быть выполнена заодно с рабочим блоком 200. К примеру, верхняя поверхность 124 выступающей части 120 закрепляется на плоской поверхности рабочего блока 200. Рабочий блок 200 может представлять собой рабочий орган механической руки-манипулятора, в частности, держатель концевого инструмента хирургического робота. Соединитель 301 ремня на конце ремня 300 удерживается в камере 113 соединителя под верхней поверхностью 124, а вторая боковая поверхность 125 обеспечивает безопасное расстояние, на котором соединитель ремня и рабочий блок 200 не мешают друг другу. Шкив 100 прикрепляется к рабочему блоку 200, как это показано на фиг. 6 и 7, после чего в камеру 113 соединителя вставляется соединитель 301 ремня, как это показано на фиг. 8, а затем в монтажное отверстие 115 вводится вращающийся вал, и шкив 100 оказывается зажатым корпусом 400 механической руки-манипулятора, как это показано на фиг. 9. Как показано на фиг. 10, одним из вариантов осуществления настоящего изобретения предложена механическая рука-манипулятор, содержащая описываемую конструкцию. Эта механическая рука-манипулятор может быть использована в составе хирургического робота.
[0051] В этой конструкции соединение рабочего блока 200 и шкива 100 представляет собой «половинчатое» соединение, т.е. каждый из двух ремней 300 наматывается на половину шкива 100 с левой или правой стороны, а выступающий участок 120 без намотанного на него ремня 300 соединен с рабочим блоком 200. За счет этого существенно уменьшена толщина соединения, поскольку отсутствуют накладки рабочего органа, используемые в существующих хирургических роботах, что приводит к уменьшению толщины оконечного звена механической руки-манипулятора и получению компактной конструкции, обладающей повышенной прочностью.
[0052] На фиг. 7 представлен шкив, симметрично-вращающийся относительно радиального направления колесообразной части 110, причем он выполнен полым спереди вверху слева и сзади вверху справа или спереди вверху справа и сзади вверху слева. Ремни 300 соединены с выступающей частью и проходят дальше, двигаясь по колесообразной части внутри указанных полостей. Таким образом, обеспечивается существенное уменьшение толщины звена механической руки-манипулятора. При этом повышена прочность соединения как области соединения между выступающими частями и рабочим органом.
[0053] В одном из вариантов осуществления настоящего изобретения ремень 300 может включать в себя стальную ленту или иные гибкие передаточные механизмы, такие как ремни, тросики или иные элементы подобного рода. Во время движения ремня шкив поворачивается менее чем на один оборот. Выступающая часть, предназначенная для подсоединения рабочего блока, располагается по ширине шкива на том же уровне, что и ремень, в результате чего повышается эффективность использования пространства. Примеры, в которых реализована та же идея, что и в настоящем изобретении, рассматриваются в качестве разновидностей вариантов осуществления настоящего изобретения.
[0054] В сравнении с предшествующим уровнем техники в шкиве 100 и конструкции, содержащей шкив 100 и рабочий блок 200, которые соединены друг с другом, согласно вариантам осуществления настоящего изобретения шкив, выполненный в виде единого целого, обладает более простой конструкцией, в которой усовершенствована колесообразная часть 110 для намотки ремня 300, а на колесообразной части 110 предусмотрена дополнительная выступающая часть 120, причем шкив 100 прикреплен к рабочему блоку 200 посредством выступающий части 120, выполненной заодно с колесообразной частью 110 таким образом, что можно пренебречь такими компонентами, как накладки 120' внутреннего выступа, показанные на фиг, 1, Таким образом, уменьшается толщина соединения шкива 100 и обеспечивается компактная конструкция, содержащая шкив 100 и рабочий блок 200, что приводит к уменьшению размеров и снижению веса механической руки-манипулятора и, соответственно, к повышению точности работы во время хирургических вмешательств.
[0055] Представленное выше описание раскрывает лишь некоторые варианты осуществления настоящего изобретения, и предполагается, что оно не ограничивает объем заявленного изобретения. Любые эквивалентные конструктивные модификации, внесенные с использованием содержания описания заявленного изобретения и прилагаемых к нему чертежей или примененные в других родственных областях техники с использованием идеи заявленного изобретения, входят в объем настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| Тренажёр для вейкборда | 2022 |
|
RU2772192C1 |
| УСТРОЙСТВО И СПОСОБ СТРЕЛОЧНОГО ПЕРЕВОДА | 2009 |
|
RU2521061C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| Фиксатор для присоединения ремня и головная гарнитура респиратора, содержащая фиксатор | 2016 |
|
RU2672729C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СТАНЦИЯ | 2014 |
|
RU2657958C2 |
| МЕДИЦИНСКИЙ МАНИПУЛЯТОР | 2008 |
|
RU2445933C2 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| СТАНОК-КАЧАЛКА С ПРОТИВОВЕСОМ И РЕВЕРСИВНЫМИ ДВИГАТЕЛЯМИ | 2013 |
|
RU2630062C2 |
| ДВУХКОМПОНЕНТНЫЙ ДИСТАНЦИОННЫЙ МАНИПУЛЯТОР | 2005 |
|
RU2363570C2 |
Заявленная группа изобретений относится к медицинской технике, а именно к узлам механической передачи для руки-манипулятора. Шкив для руки-манипулятора содержит: колесообразную часть, включающую в себя две торцевые поверхности, расположенные напротив друг друга, и боковую поверхность, соединяющую между собой две торцевые поверхности. Боковая поверхность включает в себя грань главной дуги и грань ответвляющейся дуги. Грань ответвляющейся дуги характеризуется наличием переднего конца, соединенного с гранью главной дуги, и заднего конца, выполненного с возможностью подсоединения ремня. В осевом направлении колесообразной части грань ответвляющейся дуги характеризуется шириной, которая меньше ширины грани главной дуги. Гранью ответвляющейся дуги и гранью главной дуги образована непрерывная дугообразная поверхность, выполненная для движения ремня; и выступающую часть, прикрепленная к колесообразной части. Выступающая часть расположена в положении, примыкающем к грани ответвляющейся дуги по ширине грани главной дуги, и выходит за грань ответвляющейся дуги в радиальном направлении колесообразной части. Выступающая часть выполнена с возможностью соединения шкива с рабочим органом руки-манипулятора. Каждая из левой и правой сторон шкива содержит грань ответвляющейся дуги и выступающую часть, которая расположена между гранью главной дуги и гранью ответвляющейся дуги в окружном направлении. Рука-манипулятор, включающая в себя рабочий орган и шкив, соединенный с рабочим органом через выступающую часть. Техническим результатом является создание шкива и руки-манипулятора, содержащей шкив, предназначенных для устранения противоречия между минимизацией толщины и максимальным повышением прочности соединения между рабочим органом и механической рукой-манипулятором соответственно для обеспечения небольшой толщины и высокой прочности. 2 н. и 9 з.п. ф-лы, 10 ил.
1. Шкив для руки-манипулятора, содержащий:
колесообразную часть, включающую в себя две торцевые поверхности, расположенные напротив друг друга, и боковую поверхность, соединяющую между собой две торцевые поверхности, при этом боковая поверхность включает в себя грань главной дуги и грань ответвляющейся дуги, причем грань ответвляющейся дуги характеризуется наличием переднего конца, соединенного с гранью главной дуги, и заднего конца, выполненного с возможностью подсоединения ремня, причем в осевом направлении колесообразной части грань ответвляющейся дуги характеризуется шириной, которая меньше ширины грани главной дуги, причем гранью ответвляющейся дуги и гранью главной дуги образована непрерывная дугообразная поверхность, выполненная для движения ремня; и
выступающую часть, прикрепленную к колесообразной части, при этом выступающая часть расположена в положении, примыкающем к грани ответвляющейся дуги по ширине грани главной дуги, и выходит за грань ответвляющейся дуги в радиальном направлении колесообразной части, причем выступающая часть выполнена с возможностью соединения шкива с рабочим органом руки-манипулятора,
причем каждая из левой и правой сторон шкива содержит грань ответвляющейся дуги и выступающую часть, которая расположена между гранью главной дуги и гранью ответвляющейся дуги в окружном направлении.
2. Шкив по п. 1, в котором выступающая часть включает в себя первую торцевую поверхность, примыкающую к грани ответвляющейся дуги и перпендикулярную грани ответвляющейся дуги; вторую торцевую поверхность напротив первой торцевой поверхности; первую боковую поверхность, соединяющую первую торцевую поверхность и вторую торцевую поверхность и отходящую от грани главной дуги; верхнюю поверхность, соединяющую первую торцевую поверхность и вторую торцевую поверхность и располагающуюся поверх шкива; и вторую боковую поверхность, располагающуюся выше грани ответвляющейся дуги и соединяющуюся с верхней поверхностью; при этом верхняя поверхность выполнена с возможностью прикрепления к поверхности рабочего органа руки-манипулятора.
3. Шкив по п. 2, в котором на заднем конце грани ответвляющейся дуги расположена камера соединителя, выполненная с возможностью приема и удержания соединителя ремня, соединенного с ремнем.
4. Шкив по п. 3, в котором камера соединителя включает в себя внутреннюю полость и приемную щель, размеры которой меньше размеров внутренней полости, причем приемная щель открыта в сторону грани ответвляющейся дуги.
5. Шкив по п. 4, в котором приемная щель характеризуется наличием верхней поверхности, соединяющейся со второй боковой поверхностью, причем верхняя поверхность расположена над камерой соединителя и расположена от камеры соединителя на расстоянии.
6. Шкив по любому из предшествующих пп. 1-5, в котором шкив выполнен с возможностью симметричного вращения относительно радиального направления колесообразной части.
7. Шкив по п. 6, в котором каждая из двух граней ответвляющейся дуги характеризуется центральным углом, превышающим 90°.
8. Шкив по п. 7, в котором грань главной дуги характеризуется центральным углом в 180°, причем ширина каждой из двух граней ответвляющейся дуги соответствует половине грани главной дуги, и две грани ответвляющейся дуги частично заходят друг за друга в осевом направлении колесообразной части и совместно используют грань главной дуги.
9. Шкив по п. 2, в котором первая боковая поверхность выступающей части выполнена с плавным переходом в грань главной дуги.
10. Шкив по п. 2, в котором верхняя поверхность содержит основную соединительную поверхность с каждой стороны и промежуточную соединительную поверхность, соединяющую основные соединительные поверхности.
11. Рука-манипулятор, включающая в себя рабочий орган и шкив по любому из предшествующих пп. 1-10, соединенный с рабочим органом через выступающую часть.
| US 20020133173 A1, 16.11.2001 | |||
| US 20180250085 A1, 06.09.2018 | |||
| WO 2019118334 A1, 20.06.2019 | |||
| US 20070089557 A1, 26.04.2007 | |||
| US 7850563 B2, 14.12.2010 | |||
| US 9068628 B2, 30.06.2015 | |||
| US 10188473 B2, 29.01.2019. |

