Объектом настоящего изобретения является дистанционный манипулятор, содержащий управляющую руку и исполнительную руку в виде двух отдельных частей.
Дистанционные манипуляторы, состоящие из управляющей руки и исполнительной руки, повсеместно применяются для работы во вредной среде и содержат механические трансмиссии, соединяющие шарниры звеньев управляющей руки с шарнирами звеньев исполнительной руки таким образом, чтобы воспроизводить движения управляющей руки, задаваемые оператором, при помощи исполнительной руки. Оператор держит конец управляющей руки, а конец исполнительной руки, как правило, содержит рабочий орган, предназначенный для выполнения определенной работы.
Дистанционные манипуляторы, как правило, выполняют в виде единого узла, при этом управляющая рука непосредственно соединена с исполнительной рукой, чтобы механические трансмиссии были непрерывными; вместе с тем существует конструкция, описанная во французском патенте 2667532, в которой исполнительная рука может быть отделена от управляющей руки и управляться кнопочным устройством или устройством аналогичного типа без осуществления приводного движения, воспроизводимого исполнительной рукой: команды преобразуются в электрические сигналы, поступающие на систему управления, которая включает приводы, управляющие трансмиссиями исполнительной руки согласно этим сигналам. При этом появляется возможность применения разных законов управления, возможно, более точных или более эффективных, исполнительной рукой. Другим отличительным признаком является то, что усилия в руке, возникающие по причине тяжести или производимой работы, не передаются оператору. Благодаря этому он устает меньше, хотя необходимо отметить, что часто стремятся, наоборот, чтобы оператор чувствовал усилие, пропорциональное усилию, действующему на рабочий орган, для улучшения качества управления. С этой целью дополнительно устанавливают так называемые устройства возврата усилия для создания необходимых реакций в управляющей руке. Указанный патент 2 667 532 не предусматривает создания никакой подобной реакции.
Как правило, движения дистанционных манипуляторов являются ограниченными. Так, движение поворота трубчатого звена, называемого проникающим, проходящего через защитную стенку и установленного в шарикоподшипниках, на практике ограничено, так как его производят, перемещая управляющую руку вверх, что может быть осуществлено только под небольшим углом, так как слишком большой угол подъема не позволит оператору нормально держать управляющую руку, а перемещение управляющей руки сопровождается таким же перемещением исполнительной руки, вес которой создает момент, противоположный подъему, который мешает оператору. Момент перемещения сокращают путем применения противовесов, однако на практике их действие является неполным. Несмотря на все свои возможности, исполнительные руки выполняют ограниченный объем работы и, что особенно существенно, на малой высоте. Вышеуказанный патент не предлагает ничего для устранения этого недостатка: в нем содержится указание на возможность поворота исполнительной руки при помощи силового цилиндра, установленного поперечно, который обеспечивает лишь незначительный угол движения.
Задачей настоящего изобретения является повышение возможностей движения в дистанционном манипуляторе и, в частности, повышение уровня, на который можно поднять исполнительную руку, без возникновения какого-либо неудобства для оператора.
Согласно конструкции нового дистанционного манипулятора управляющая рука и исполнительная рука отделены друг от друга, что позволяет исполнительной руке осуществлять большие повороты при сохранении, тем не менее, преимуществ подачи команды путем осуществления ручного движения, связанного, в случае необходимости, с возвратом усилия к оператору.
Объектом настоящего изобретения в целом является дистанционный манипулятор, содержащий управляющую руку и исполнительную руку, не связанные друг с другом напрямую механической трансмиссией, однако оборудованные интерфейсной системой, содержащей управляющую часть, главным образом, электрическую и компьютерную, и приводную часть, приводящую в действие механические трансмиссии, включенные в исполнительную руку, при получении командных сигналов, подаваемых управляющей частью в ответ на указания движений, выполняемых управляющей рукой; приводная часть содержит стационарный кожух, барабан, установленный с возможностью вращения в кожухе и закрепленный на исполнительной руке, и стационарный двигатель, а также трансмиссию, связывающую барабан с двигателем и позволяющую поворачивать барабан на полный оборот.
Сохранение управляющей руки предполагает также сохранение возврата усилий, действующих на оператора, после преобразования усилий, возникающих в исполнительной руке, в электрические сигналы интерфейсной системой.
Далее следует описание настоящего изобретения со ссылками на прилагаемые чертежи, на которых:
фиг.1 - общий вид настоящего изобретения;
фиг.2 - вид системы привода исполнительной руки;
фиг.3, 4 и 5 - частные варианты изобретения.
Показанная на фиг.1 исполнительная рука 1 содержит первое трубчатое звено 3, проходящее через защитную стенку 2, и последовательность 4 других звеньев, шарнирно соединенных между собой и с первым звеном 3 и находящихся за защитной стенкой 2 во вредной рабочей среде; управляющую руку 5, находящуюся на определенном расстоянии от исполнительной руки 1; и интерфейсную систему 6, состоящую из управляющей части 7 и приводной части 8, закрепленной на защитной стенке 2 и соединенной с исполнительной рукой 1. Электрические линии 9 и 10 соединяют управляющую часть 7 с управляющей рукой 5 и с приводной частью 8 для управления этой частью соответственно движениям управляющей руки. Наконец, иллюминатор 11 позволяет оператору, держащему управляющую руку 5, наблюдать за результатами ее действий на исполнительной руке 1 и рабочем органе 12 (часто выполненном в виде удерживающего захвата).
На фиг.2 показан основной вид отличительной части настоящего изобретения, то есть приводной части 8. Она содержит, главным образом, стационарный кожух 13, барабан 14, вращающийся в кожухе 13, стационарный двигатель 15 привода барабана 14 и зубчатую трансмиссию 16, обеспечивающую этот привод, которая содержит шестерню на выходном валу двигателя 15 и зубчатое колесо на барабане 14. Шестерня может входить в зацепление с зубчатым колесом или быть связанной с ним через зубчатый ремень или любое другое средство. Кожух 13 установлен на защитной стенке 2 при помощи крепежного устройства 17. Барабан 14 удерживается в кожухе 13 при помощи опорных подшипников 18, обеспечивающих его вращение, и расположен, по меньшей мере, частично в цилиндрическом участке 19 кожуха 13. Двигатель 15 закреплен в другом участке 20 кожуха 13. Трансмиссия 16 содержит шестерню 21, закрепленную на выходном валу двигателя 15, и зубчатое колесо 22, входящее в зацепление с шестерней 21 и охватывающее часть барабана 14. Эта система позволяет поворачивать барабан 14 на полный оборот вокруг оси, совпадающей с осью первого звена 3, смежного с концом барабана 14 и установленного в его продолжении. Полное соединение достигается завинчиванием входящих друг с другом в контакт фланцев 23, принадлежащих этим двум деталям. Поворот барабана 14 приводит к повороту первого звена 3, а также к повороту всей исполнительной руки 1.
Барабан 14 содержит определенное количество приводных механизмов, в том числе центральный приводной механизм 24, а другие (в количестве шести, из которых на фигуре показан только один) являются боковыми приводными механизмами 25. Каждый из этих приводных механизмов 24 и 25 соединен с трансмиссией, расположенной в исполнительной руке 1, для управления звеном последовательности 4, и, как правило, содержащей трансмиссионную штангу в трубчатом звене 3. Штанга связана с центральным приводным механизмом 24 и обозначена позицией 26, а штанги, связанные с другими приводными механизмами 25, обозначены позицией 27 (на фигуре показана только одна штанга). Штанга 26 продолжена в барабане 14 выходным валом 28 приводного механизма 24, а штанги 27 - валами 29, вращаемыми боковыми приводными механизмами 25 при помощи трансмиссий 30 с зубчатым ремнем, которые позволяют перемещать соответствующие боковые приводные механизмы 25 ближе к периферии барабана 14 и которые имеют всего лишь очень небольшой зазор. Штанги 26 и 27 соединены с валами 28 и 29 при помощи болтовых соединений 31 или аналогичных средств. Штанга 26 предназначена для перемещения звена, шарнирно соединенного с трубчатым звеном 3, а также остальной части последовательности 4 в вертикальном направлении, что позволяет создавать большой реактивный момент, возникающий по причине силы тяжести, и передает необходимую мощность на приводной механизм 24 и соответствующее сопротивление механической трансмиссии, тогда как усилия, действующие на штанги 27, валы 29 и боковые приводные механизмы 25, являются гораздо более слабыми, что позволяет применять маломощные трансмиссии 30. Точно так же поворот трубчатого звена 3 требует сопротивления значительному усилию, что оправдывает применение мощной зубчатой трансмиссии 16.
На фигуре показаны также электрические соединители 59, в которые заходят провода линии 10 и которые установлены на кожухе 13, устройство 32 намотки кабеля, обеспечивающее питание электроэнергией приводных механизмов 24 и 25, и устройство 33 прерывания хода. Далее со ссылками на следующие фигуры следует описание двух последних устройств.
На фиг.3 показано устройство 32 намотки кабеля. Оно расположено в кольцевом пространстве между цилиндрической частью 19, содержащей барабан 14, и самим барабаном 14 и в основном представляет собой деталь 34 в виде дуги окружности, свободно установленную в этом пространстве, по меньшей мере, концы которой оборудованы роликами 35. Кроме того, кабели 36 соединения с барабаном 14 содержат точку 37 крепления с барабаном 14 и точку 38 крепления с кожухом 13. Их рабочая длина составляет немногим более длины окружности барабана 14. Характеристики устройства и его работу вкратце можно представить следующим образом: исполнительная рука 1 и, в частности, трубчатое звено 3 должны поворачиваться для их приведения в любые угловые положения; перемещения на один оборот достаточно для установки рабочего органа 12 в любое положение, тем не менее необходим несколько больший угловой ход для поглощения торможения руки и срабатывания устройств конца хода. Деталь 34 в виде дуги окружности распределяет длину кабелей 36 в виде наружной ветви, соседней с цилиндрическим участком 19, и внутренней ветви, соседней с барабаном 14, по обе стороны от одного из роликов 35. В данном случае барабан 14 находится в крайнем положении. Поворачивая его по часовой стрелке, действуют тяговым усилием на внутреннюю ветвь кабелей 36, уменьшая длину наружной ветви и поворачивая деталь 34 в виде дуги окружности. Вращение происходит до полного выбирания наружной ветви. Необходимое положение кабелей 36 обеспечивается деталью 34 в виде дуги окружности, которая выполняет роль автоматического стопора для любого положения. Барабан 14 может быть повернут на один оборот и более без помех и с минимальным трением. На практике кабели помещают в защитный желоб рядом с его средним радиусом кривизны для сведения к минимуму трения кабелей между собой.
На фиг.4 показано устройство 33 конца хода. На периферии барабана 14 установлен винт 39. На кожухе 13 установлены два контакта конца хода. На кожухе 13 установлена также направляющая 41, по которой скользит каретка 42. Каретка 42 содержит кулачок 43, который может входить в положение упора с контактами 40 конца хода, и пару роликов 44, охватывающих винт 39, образуя паз, в который заходит каретка 42. Вращение барабана 14 заставляет перемещаться винт 39 между роликами 44, который перемещает эти ролики, а также остальную часть каретки 42, при этом направляющие 41 расположены параллельно оси вращения барабана 14 и оси вращения винта 39. Когда кулачок 43 соприкасается с контактами 40 конца хода, происходит остановка барабана 14. Контакты 40 конца хода соединены с управляющей частью 7 электрическими линиями, не показанными на фигуре и предназначенными для сигнализации о ее состоянии. Этот способ обеспечивает защиту устройства намотки на его угловом ходе вращения.
На фиг.5 показан частный усовершенствованный вариант выполнения. Его применяют для некоторых известных исполнительных рук, отличающихся тем, что последние звенья последовательности 4 выполнены не поворотными, а с возможностью скольжения для изменения длины исполнительной руки 1. Этот отличительный признак относится в данном случае к трем концевым звеньям 45, 46 и 47. Трансмиссия, позволяющая регулировать развертывание среднего звена 46 относительно предыдущего звена 45, содержит червяк 48, проходящий через резьбовую втулку 49, закрепленную на среднем звене 46, причем червяк 48 удерживается в неподвижном положении предыдущего звена 45 при помощи фланцев 50. Он приводится во вращение средствами с зубчатой передачей, конической передачей, трансмиссионной штангой и т.д., проходящими через предыдущие звенья и заканчивающимися трансмиссионной штангой и одним из приводных механизмов 25. Конструкция такой руки известна и на чертеже представлена только частично вместе с трансмиссией. Это же относится и к трансмиссии, управляющей движением крайнего звена 47. Следует просто упомянуть, что она содержит кабельный элемент 51 с двойной ветвью, при этом ветви доходят соответственно до пары шкивов 52, приводимых в действие одной и той же приводной штангой 27. Своим противоположным концом они доходят до общей точки 53 крепления на крайнем звене 47, при этом одна из них проходит также через направляющий шкив 54, закрепленный в нижней части среднего звена 46. Поскольку ветви намотаны на шкивы 52 в противоположных направлениях, то при вращении штанги 27 одна из них разматывается, а другая наматывается, в результате чего они взаимодействуют для развертывания или складывания крайнего звена 47 в среднем звене 46. Следует отметить, что вращение червяка 48 перемещает не только среднее звено 46, но также крайнее звено 47, так как ветви кабеля 51 проходят также через другой направляющий шкив 55, неподвижно соединенный с кареткой 56, установленной на предыдущем звене 45 и связанной со средним звеном 46 другим кабелем 57. Перемещение среднего звена 46, например, вниз ослабляет кабель 57, который позволяет каретке 56 подняться вдоль предыдущего звена 45 на половину ее перемещения, при этом каждая из ветвей кабеля 51 ослабляется на половину перемещения с каждой стороны от направляющего шкива 55, и крайнее звено 47 опускается на такое же расстояние, что и среднее звено 46.
Червячная трансмиссия 48 является прочной, в отличие от кабельной трансмиссии 51. Иногда на звенья последовательности 4 действуют большие усилия, например, от тяжелого груза. В этом случае предусмотрена блокировка движения кабеля 51 и осуществление движения только от червяка 48. Это достигается при помощи механического тормоза 58, блокирующего вращение вала 29, связанного с кабельной трансмиссией 51, при этом тормоз выполнен в виде фрикционного диска или подвижной кулачковой сцепной муфты. Приводной механизм 25 и взаимодействующая с ним трансмиссия 30 освобождаются от усилия, воздействующего на приводную штангу 27.
В качестве управляющей руки 5 можно использовать руку, выпускаемую компанией «Haption» под названием «Virtuose 6D 4040». Ее мощность по усилию ограничена 4 килограммами. Ее трение (по отношению к мощности) сравнимо с трением исполнительной руки 1 и с трением известного дистанционного манипулятора. Необходимо также отметить, что управляющая часть 7 может также работать на возврат усилия, то есть накапливать усилия, воздействующие на исполнительную руку 1, за счет усилий, создаваемых приводными механизмами, или при помощи соответствующих датчиков, установленных на приводных механизмах или трансмиссиях, и передавать эти усилия оператору, ощущаемые им, путем создания усилий в приводных механизмах управляющей руки. Вместе с тем, предусмотрено, чтобы разъединение управляющей руки 5 и исполнительной руки 1 позволяло намного легче управлять управляющей рукой 5 с ограниченными усилиями, позволяющими оператору использовать одновременно обе руки манипулятора, каждую из которых он держит каждой своей рукой, что существенно расширяет его возможности работы по сравнению с известными на сегодняшний день утомляющими операторов руками манипуляторов. Может применяться также другой вариант привода, согласно которому оператор использует только одну управляющую руку и управляет в одиночку двумя исполнительными руками с рабочего поста, что позволяет, в частности, удвоить мощность усилия и создавать большие моменты сил, действуя в противовес на деталь в двух удаленных точках. Наконец, следует отметить, что балансировку исполнительной руки 1 предпочтительно можно осуществлять путем подачи команд при помощи программного обеспечения, которое может рассчитывать моменты сил и усилия, возникающие за счет силы тяжести. В случае необходимости можно гораздо проще осуществлять балансировку при помощи противовеса в отсутствие связанной с ним управляющей руки.
Изобретение относится к дистанционному манипулятору, содержащему не соединенные механически управляющую руку и исполнительную руку, при этом оборудованные интерфейсной системой, содержащей управляющую часть и приводную часть. Управляющая часть управляет приводными механизмами в ответ на указания движения, выдаваемые управляющей рукой. Приводная часть соединена с трубчатым звеном и содержит механизмы привода механических трансмиссий, включенных в исполнительную руку, стационарный кожух, барабан, установленный с возможностью вращения в кожухе и закрепленный на трубчатом звене, стационарный двигатель и трансмиссию, содержащую зубчатое колесо вокруг барабана и орган зацепления с зубчатым колесом и соединяющую барабан со стационарным двигателем. Изобретение способствует повышению возможностей движения в дистанционном манипуляторе и, в частности, повышению уровня, на который можно поднять исполнительную руку, без возникновения какого-либо неудобства для оператора, а также предполагает сохранение возврата усилий, действующих на оператора, после преобразования усилий, возникающих в исполнительной руке, в электрические сигналы интерфейсной системой. 8 з.п. ф-лы, 5 ил.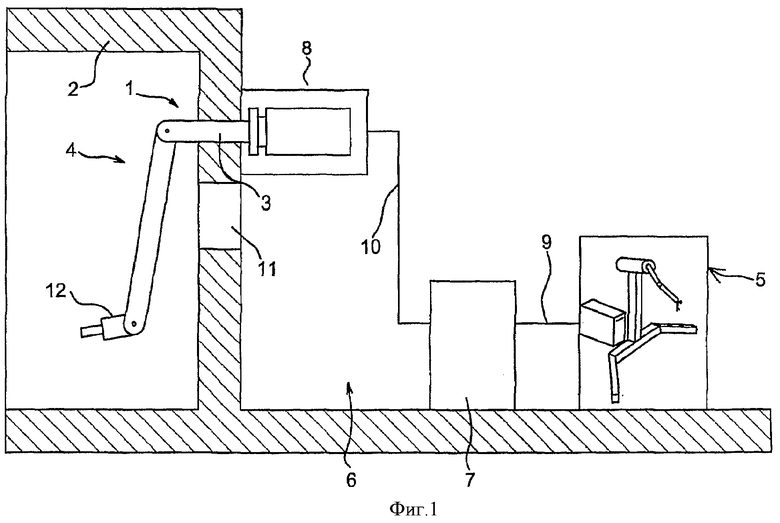
1. Дистанционный манипулятор, содержащий управляющую руку (5), управляемую оператором, исполнительную руку (1), содержащую первое трубчатое звено (3) проходящее через стенку (2), и звенья, заканчивающиеся рабочим органом (12), при этом указанные звенья образуют шарнирную последовательность (4), отличающийся тем, что управляющая рука и исполнительная рука, без их объединения прямой механической трансмиссией, оборудованы интерфейсной системой, содержащей управляющую часть (7) и приводную часть (8), при этом приводная часть соединена с трубчатым звеном (3) и содержит механизмы (24, 25) привода механических трансмиссий (26, 27), включенных в исполнительную руку (1), а управляющая часть (7) управляет приводными механизмами в ответ на указания движения, выдаваемые управляющей рукой, при этом приводная часть содержит стационарный кожух (13), барабан (14), установленный с возможностью вращения в кожухе и закрепленный на трубчатом звене (3), стационарный двигатель (15) и трансмиссию (16), содержащую зубчатое колесо вокруг барабана (14) и орган зацепления с зубчатым колесом и соединяющую барабан со стационарным двигателем.
2. Дистанционный манипулятор по п.1, отличающийся тем, что он содержит устройство (32) намотки электрических кабелей для соединения с приводными механизмами.
3. Дистанционный манипулятор по п.2, отличающийся тем, что устройство (32) намотки содержит деталь (34) в виде дуги окружности, установленную свободно между барабаном (14) и цилиндрическим участком кожуха (13), при этом электрические кабели (36) закреплены в точке барабана и в точке указанного цилиндрического участка.
4. Дистанционный манипулятор по п.1, отличающийся тем, что он содержит прерыватели (33) хода барабана, содержащие стационарные части и подвижные части, установленные на скользящей каретке (42), и винт (39), закрепленный на барабане и заходящий в паз каретки.
5. Дистанционный манипулятор по п.2, отличающийся тем, что он содержит прерыватели (33) хода барабана, содержащие стационарные части и подвижные части, установленные на скользящей каретке (42), и винт (39), закрепленный на барабане и заходящий в паз каретки.
6. Дистанционный манипулятор по п.3, отличающийся тем, что он содержит прерыватели (33) хода барабана, содержащие стационарные части и подвижные части, установленные на скользящей каретке (42), и винт (39), закрепленный на барабане и заходящий в паз каретки.
7. Дистанционный манипулятор по любому из предыдущих пунктов, отличающийся тем, что одна (26) из механических трансмиссий, включенных в исполнительную руку, вращающая одно из звеньев шарнирной последовательности (4), смежное с первым звеном, и приводной механизм (24), приводящий в действие указанную механическую трансмиссию, установлены вдоль оси вращения первого звена.
8. Дистанционный манипулятор по любому из пп.1-6, отличающийся тем, что два из звеньев шарнирной последовательности (4) совершают скользящие движения под действием механических трансмиссий, одна из которых содержит кабель, а другая содержит червяк, и тем, что в приводной части интерфейсной системы установлено устройство (58) механической блокировки трансмиссии, содержащей кабель.
9. Дистанционный манипулятор по п.7, отличающийся тем, что два из звеньев шарнирной последовательности (4) совершают скользящие движения под действием механических трансмиссий, одна из которых содержит кабель, а другая содержит червяк, и тем, что в приводной части интерфейсной системы установлено устройство (58) механической блокировки трансмиссии, содержащей кабель.
| Многоступенчатая турбомашина со встроенными электродвигателями | 2015 |
|
RU2667532C1 |
| US 3428189 А, 18.02.1969 | |||
| US 6259806 В1, 10.07.2001 | |||
| US 5004391 А, 02.04.1991 | |||
| ДИСТАНЦИОННЫЙ КОПИРУЮЩИЙ МАНИПУЛЯТОР | 0 |
|
SU275680A1 |

