Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного, морского и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения.
Достижение высокой эффективности обнаружения, локализации и идентификации наземных, морских и воздушных объектов ограничивается существенной априорной неопределенностью размеров, ориентации в пространстве, отражающих свойств и параметров движения объектов, а также несовершенством известных способов обнаружения и слежения за подвижными объектами.
Технология скрытного обнаружения и слежения за подвижными объектами, использующая естественный радиоподсвет целей, создаваемый на множестве частот радиоизлучениями передатчиков различного назначения, пока еще не получила достаточного распространения, несмотря на то, что может существенно повысить скрытность и эффективность обнаружения, пространственной локализации и идентификации широкого класса подвижных объектов.
Известен способ обнаружения подвижных объектов [1], заключающийся в том, что когерентно принимают двумя пространственно разнесенными приемными каналами многолучевые радиосигналы, включающие прямые радиосигналы передатчиков и рассеянные от объектов радиосигналы этих передатчиков, формируют сигнал, описывающий взаимную корреляционную функцию (ВКФ), зависящую от временного сдвига радиосигналов, принятых парой приемных каналов, выделяют центральную часть ВКФ, преобразуют выделенную центральную часть ВКФ в комплексную взаимную спектральную плотность (ВСП) принятого радиосигнала, из комплексной ВСП формируют рассеянные объектами радиосигналы, по которым выполняют обнаружение и пространственную локализацию подвижных объектов.
Данный способ решает задачу скрытного обнаружения подвижных объектов при условии нахождения центральной части ВКФ в области нулевых задержек, то есть при малом временном сдвиге между принятыми сигналами, что соответствует узкому сектору углов прихода сигналов вблизи нормали к линии положения антенн двух приемных каналов.
Более эффективным является способ обнаружения подвижных объектов [2], свободный от этого недостатка и выбранный в качестве прототипа. Согласно этому способу:
когерентно принимают двумя пространственно разнесенными приемными каналами многолучевые радиосигналы, включающие излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром и рассеянные объектами радиосигналы этого передатчика,
синхронно преобразуют принятые радиосигналы в комплексные цифровые сигналы, которые синхронно регистрируют на заданном временном интервале,
из комплексных цифровых сигналов формируют комплексную двумерную взаимную корреляционную функцию (ДВКФ), зависящую как от временного, так и от частотного сдвига цифровых сигналов,
сдвигают по времени комплексную ДВКФ на величину, соответствующую каждому ожидаемому направлению m=1,…,М прихода радиосигналов,
выделяют центральную двумерную часть каждой сдвинутой комплексной ДВКФ,
преобразуют каждую выделенную центральную часть комплексной ДВКФ в комплексный цифровой сигнал m-го направления, который запоминают в форме векторного сигнала m-го направления,
идентифицируют сформированный для совпадающего с направлением на передатчик подсвета векторный сигнал как прямой сигнал x(m′), а векторные сигналы других направлений как разведываемые сигналы x(m),
для каждого m-го направления формируют комплексную ДВКФ между прямым сигналом передатчика x(m′) и комплексным цифровым сигналом m-го направления x(m),
исключают центральную часть комплексной ДВКФ и получают сигнал модифицированной комплексной ДВКФ,
из сигнала модифицированной комплексной ДВКФ и прямого сигнала формируют модифицированный рассеянный сигнал,
формируют результирующую комплексную ДВКФ между модифицированным рассеянным сигналом и прямым сигналом,
определяют по максимумам модуля результирующей комплексной ДВКФ число сжатых рассеянных сигналов m-го направления и фиксируют значения задержки по времени, абсолютного доплеровского сдвига и направления прихода каждого сжатого сигнала, по которым выполняют обнаружение и определение пространственных координат подвижных объектов.
Способ-прототип включает операции формирования частотно-временного изображения рассеянных объектами радиосигналов, основанные на формировании классической двумерной взаимной корреляционной функции, которая, кроме основного лепестка, ограничивающего разрешающую способность обнаружения, содержит высокие боковые лепестки, маскирующие сигналы далеких и слабо рассеивающих целей.
Таким образом, недостатком способа-прототипа является низкая эффективность обнаружения далеких и слабо рассеивающих объектов.
Техническим результатом изобретения является повышение эффективности обнаружения подвижных объектов.
Повышение эффективности обнаружения подвижных объектов достигается за счет применения новых операций адаптивной и нелинейной обработки с обратной связью по полезному радиосигналу, обеспечивающих повышение чувствительности, динамического диапазона и разрешающей способности формирования частотно-временного изображения радиосигналов, рассеянных объектами.
Технический результат достигается тем, что в способе обнаружения подвижных объектов, заключающемся в том, что когерентно принимают двумя пространственно разнесенными приемными каналами многолучевые радиосигналы, включающие излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром и рассеянные объектами радиосигналы этого передатчика, синхронно преобразуют принятые радиосигналы в комплексные цифровые сигналы, которые синхронно регистрируют на заданном временном интервале, из комплексных цифровых сигналов формируют комплексную двумерную взаимно корреляционную функцию (ДВКФ), зависящую как от временного, так и от частотного сдвига цифровых сигналов, сдвигают по времени комплексную ДВКФ на величину, соответствующую каждому ожидаемому направлению прихода радиосигналов, выделяют центральную двумерную часть каждой сдвинутой комплексной ДВКФ, преобразуют каждую выделенную центральную часть комплексной ДВКФ в комплексный цифровой сигнал m-то направления, который запоминают в форме векторного сигнала m-то направления, идентифицируют сформированный для совпадающего с направлением на передатчик подсвета векторный сигнал как прямой сигнал x(m′), а векторные сигналы других направлений как разведываемые сигналы x(m), согласно изобретению преобразуют прямой сигнал x(m′) в матричный сигнал комплексной фазирующей функции А, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом, запоминают матричный сигнал А, для каждого m-го направления преобразуют разведываемый сигнал x(m) в сигнал комплексного частотно-временного изображения 

 ,
, 

 , где λ - множитель Лагранжа, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения, после чего по локальным максимумам квадратов модулей элементов текущего частотно-временного изображения
, где λ - множитель Лагранжа, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения, после чего по локальным максимумам квадратов модулей элементов текущего частотно-временного изображения 
Операции способа поясняются чертежом.
Способ обнаружения подвижных объектов осуществляется следующим образом:
1. Когерентно принимают двумя пространственно разнесенными приемными каналами многолучевые радиосигналы, включающие излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром и рассеянные от объектов радиосигналы этого передатчика. В результате формируются сигналы xn(t), зависящие от времени t и номера приемного канала n=1,2.
2. Синхронно преобразуют принятые радиосигналы x1(t) и x2(t) в комплексные цифровые сигналы x1(z) и x2(z), где z - номер временного отсчета сигнала.
Преобразование принятых радиосигналов x1(t) и x2(t) в комплексные цифровые сигналы x1(z) и x2(z) может быть выполнено различными способами. Например, аналогово-цифровым или полностью цифровым способами, основанными на преобразовании Гильберта [3, стр.65] или квадратурной дискретизации [3, стр.169]. Значение периода дискретизации Td должно быть много меньше минимального значения задержки между моментами прихода сигналов на две антенны, то есть 
3. Синхронно регистрируют комплексные цифровые сигналы x1(z) и x2(z) на заданном временном интервале.
4. Из комплексных цифровых сигналов x1(z) и x2(z) формируют комплексную двумерную взаимную корреляционную функцию (ДВКФ) R(τ,F), зависящую как от временного τ, так и от частотного F сдвига цифровых сигналов.
Формирование ДВКФ (другими словами, время-частотной функции рассогласования [4, стр.103]), выполняют во временной 

5. Сдвигают по времени комплексную ДВКФ R(τ,F) на величину, соответствующую каждому ожидаемому направлению m=1,…,М прихода радиосигналов.
Сдвиг выполняют следующим образом:
U(m)(k,F)=Fτ{R(τ,F)}, J(m)(k,F)=U(m)(k,F)exp(-jωkτ(m)),


Значения временных сдвигов, соответствующие каждому ожидаемому направлению прихода радиосигналов, вычисляют по следующей формуле: 
Отметим, что данную операцию можно рассматривать как составляющую операции наведения 2-элементной антенной решетки в каждое из m=1,…,М угловых направлений, что необходимо для последующего разделения и локализации по пространству принятых радиосигналов: прямого радиосигнала передатчика подсвета и рассеянных объектами радиосигналов.
В результате выполнения описанных операций получают М комплексных ДВКФ R(m)(τ,F).
6. Выделяют центральную двухмерную часть 
Параметры Δ и Θ выбирают, исходя из необходимости подавления шумов и побочных пиков функции рассогласования, определяющих уровень взаимных помех, а также исходя из допустимого уровня искажения фронтов импульсов полезного сигнала.
Данную операцию можно рассматривать как операцию применения двухмерного окна, имеющего квадратную или прямоугольную опорную область, к комплексной ДВКФ R(m)(τ,F). Применение двухмерного окна к комплексной ДВКФ R(m)(τ,F) эквивалентно двухмерной фильтрации комплексного цифрового сигнала m-го направления, формируемого на следующем этапе.
7. Преобразуют каждую выделенную центральную часть комплексной ДВКФ в комплексный цифровой сигнал m-го направления
комплексной ДВКФ в комплексный цифровой сигнал m-го направления  , который запоминают в форме векторного сигнала m-го направления x(m)=[x(m)(1),…,x(m)(z),…,x(m)(Z)]T, где Z - число временных отсчетов сигнала, а верхний индекс […]T означает операцию транспонирования.
, который запоминают в форме векторного сигнала m-го направления x(m)=[x(m)(1),…,x(m)(z),…,x(m)(Z)]T, где Z - число временных отсчетов сигнала, а верхний индекс […]T означает операцию транспонирования.
В результате выполнения описанных операций получают М векторных цифровых сигналов x(m).
Описанные операции обеспечивают разделение входного потока радиосигналов, включающего излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром и рассеянные объектами радиосигналы этого передатчика.
Понятно, что одно из направлений m=1,…,М, например m′ совпадает с априорно известным направлением на выбранный передатчик подсвета. Следовательно, сформированный при наведении двухэлементной решетки в направление m′ векторный сигнал 
8. Идентифицируют сформированный для совпадающего с направлением m′ на передатчик подсвета векторный сигнал как прямой сигнал x(m′), а векторные сигналы других направлений как разведываемые сигналы x(m).
9. Преобразуют прямой сигнал x(m′) в матричный сигнал комплексной фазирующей функции А, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом. Запоминают матричный сигнал А.
Преобразование прямого сигнала x(m′) в матричный сигнал А осуществляют по следующей формуле: 

D=[d-L,…,D-ℓ,…,D0,…,D+ℓ,…,D+L], 
- матрицы доплеровских сдвигов размером, ℓ=0,…,±L, L - размер координатной сетки по доплеровскому сдвигу.
Таким образом, столбцы матрицы А представляют собой задержанные по времени и сдвинутые по частоте доплеровского сдвига версии прямого сигнала x(m′), а размер этой матрицы Z×J(2L+1), определяется числом отсчетов в разведываемом сигнале (длительностью интервала наблюдения) и размерами координатной сетки по временному запаздыванию и доплеровскому сдвигу частоты.
10. Для каждого m-го направления преобразуют разведываемый сигнал x(m) в сигнал комплексного частотно-временного изображения
При этом выполняют следующие действия:
- преобразуют сигнал фазирующей функции А в эрмитово сопряженный сигнал 

- умножая сигнал

- обращая матрицу полученного сигнала AHA, формируют и запоминают сигнал (AHA)-1;
- умножая сигнал
- умножая сигнал (AHA)-1 на сигнал AHx(m), получают сигнал частотно-временного изображения
Если величину (AHA)-1 рассматривать как нормировку, то синтезированное начальное приближение комплексного частотно-временного изображения 

Сигнал 
Описанные операции могут рассматриваться как нулевая итерация синтеза сигнала комплексного частотно-временного изображения. После ее выполнения начинается рабочий цикл последовательных (k=1,2,…) итераций синтеза.
Сигнал 
11. Итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал  - z-й элемент вектора
- z-й элемент вектора 
 , где λ - множитель Лагранжа, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения.
, где λ - множитель Лагранжа, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения.
При этом выполняют следующие действия:
- формируют сигналы модулей 

При восстановлении сигналов модулей 
- возводя полученное приближение сигналов модулей
 .
.
Таким образом, на первой (k=1) и последующих (k=2,3,…) итерациях вспомогательный сигнал  выражается через сигнал частотно-временного изображения
выражается через сигнал частотно-временного изображения
- используя полученный вспомогательный сигнал  и запомненные сигналы AHA и AHx(m), формируют взвешивающий сигнал
и запомненные сигналы AHA и AHx(m), формируют взвешивающий сигнал  и зависящий от предыдущего решения сигнал очередного приближения частотно-временного изображения
и зависящий от предыдущего решения сигнал очередного приближения частотно-временного изображения  , который запоминают для использования на очередной итерации. Значение множителя Лагранжа λ выбирают, исходя из уровня шумов в каналах приема;
, который запоминают для использования на очередной итерации. Значение множителя Лагранжа λ выбирают, исходя из уровня шумов в каналах приема;
- сравнивают энергию разности частотно-временных изображений 

- при невыполнении условия  , , , запоминания
, , , запоминания 
При выполнении условия
Таким образом, учитывая, что сигнал выражается через полученный на предыдущей итерации сигнал частотно-временного изображения

Кроме того, учитывая, что сигнал зависит от модуля в степени (-1) частотно-временного изображения
и, следовательно, сигнала 
Устройство, в котором реализуется предложенный способ обнаружения подвижных объектов, включает последовательно соединенные антенную систему 1, двухканальный преобразователь частоты (ПРЧ) 2, двухканальное устройство квадратурной дискретизации 3, вычислитель 4, устройство отображения 5.
Антенная система 1 содержит две антенны, объединенные в решетку. Для устранения неоднозначности по пространству используются антенны с кардиоидной или более острой диаграммой направленности.
Двухканальный ПРЧ 2 выполнен с общим гетеродином. Общий гетеродин обеспечивает двухканальный когерентный прием радиосигналов.
Устройство, реализующее предложенный способ, работает следующим образом.
Многолучевые радиосигналы, включающие излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром, и отраженные от объектов радиосигналы этого передатчика принимаются антеннами 1 и 2 двух пространственно разнесенных приемных каналов. Принятые каждой антенной решетки 1, зависящие от времени, многолучевые радиосигналы в ПРЧ 2 когерентно переносятся на более низкую частоту.
Сформированные в ПРЧ 2 "сигналы x1(t) и x2(t) синхронно преобразуются в двухканальном устройстве квадратурной дискретизации 3 в комплексные цифровые сигналы x1(z) и x2(z). Комплексные цифровые сигналы x1(z) и x2(z) синхронно регистрируются на заданном временном интервале в вычислителе 4.
Кроме того, в вычислителе 4 выполняются следующие действия:
- из комплексных цифровых сигналов x1(z) и x2(z) формируется комплексная ДВКФ R(τ,F);
- сдвигается по времени комплексная ДВКФ R(τ,F) на величину, соответствующую каждому ожидаемому направлению m=1,…,М прихода радиосигналов;
- выделяется центральная двухмерная часть  каждой сдвинутой комплексной ДВКФ. R(m)(τ,F);
каждой сдвинутой комплексной ДВКФ. R(m)(τ,F);
- преобразуется каждая выделенная центральная часть  комплексной ДВКФ в комплексный цифровой сигнал m-го направления x(m)(z), который запоминается в форме векторного сигнала m-го направления x(m);
комплексной ДВКФ в комплексный цифровой сигнал m-го направления x(m)(z), который запоминается в форме векторного сигнала m-го направления x(m);
- идентифицируются сформированный для совпадающего с направлением m′ на передатчик подсвета векторный сигнал как прямой сигнал x(m′), а векторные сигналы других направлений как разведываемые сигналы x(m);
- преобразуется прямой сигнал x(m′) в матричный сигнал комплексной фазирующей функции А, который запоминается;
- для каждого m-го направления разведываемый сигнал x(m) преобразуется в сигнал комплексного частотно-временного изображения
- итерационно формируется зависящий от предыдущего решения вспомогательный матричный сигнал и сигнал очередного приближения частотно-временного изображения 
- после этого восстанавливаются квадраты модулей элементов частотно-временного изображения 
При обнаружении и определении пространственных координат подвижных объектов выполняются следующие действия:
- сравниваются с порогом значения доплеровского сдвига рассеянного радиосигнала и при превышении порога принимается решение об обнаружении подвижного объекта в m-м направлении.
Порог выбирается исходя из минимизации вероятности пропуска объекта;
- по значению временной задержки радиосигнала определяется кажущаяся дальность до обнаруженного объекта, а по кажущейся дальности и значению m-го направления прихода рассеянного радиосигнала определяются пространственные координаты обнаруженного объекта известным способом [2].
В устройстве 5 индицируются результаты обнаружения и локализации по частоте, времени и направлению прихода всего множества радиосигналов обнаруженных объектов, одновременно попадающих в анализируемую частотно-временную область приема.
Из приведенного описания следует, что устройство, реализующее предложенный способ, обеспечивает повышение эффективности обнаружения подвижных объектов за счет реализации новых операций нелинейной и адаптивной обработки радиосигналов.
Таким образом, за счет применения вместо операций, основанных на формировании классической двумерной взаимной корреляционной функции, операций адаптивной обработки с обратной связью по полезному радиосигналу и операций нелинейной обработки принятых радиосигналов, обеспечивающих повышение чувствительности, динамического диапазона и разрешающей способности формирования частотно-временного изображения рассеянных объектами радиосигналов, удается решить поставленную задачу с достижением указанного технического результата.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. US, патент, 5 955 993, кл. G01S 3/02, 1999.
2. RU, патент, 2 471 199, кл. G01S 13/02, 2012.
3. Сергиенко А.Б. Цифровая обработка сигналов: Учебник для вузов. 2-е изд. - СПб.: Питер, 2006.
4. Ширман Я.Д., Манжос В.Н. Теория и техника обработки радиолокационной информации на фоне помех. - М.: Радио и связь, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СКРЫТНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2521608C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2716006C2 |
| СПОСОБ ДИСТАНЦИОННОГО МОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2018 |
|
RU2723432C2 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2529483C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524401C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО РАДИОКОНТРОЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2546330C1 |
| СПОСОБ ПОИСКА МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2546331C2 |
| СПОСОБ СКРЫТНОЙ РАДИОЛОКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557250C1 |
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2011 |
|
RU2471200C1 |
| СПОСОБ ПОЛЯРИЗАЦИОННО-ЧУВСТВИТЕЛЬНОГО ПОИСКА МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2014 |
|
RU2557251C1 |
Изобретение относится к радиотехнике и может быть использовано в системах контроля наземного, морского и воздушного пространства с использованием прямых и рассеянных объектами радиосигналов, излучаемых множеством неконтролируемых и контролируемых передатчиков радиоэлектронных систем различного назначения. Техническим результатом изобретения является повышение эффективности обнаружения подвижных объектов. Повышение эффективности обнаружения достигается за счет применения новых операций адаптивной и нелинейной обработки с обратной связью по полезному радиосигналу. 1 ил.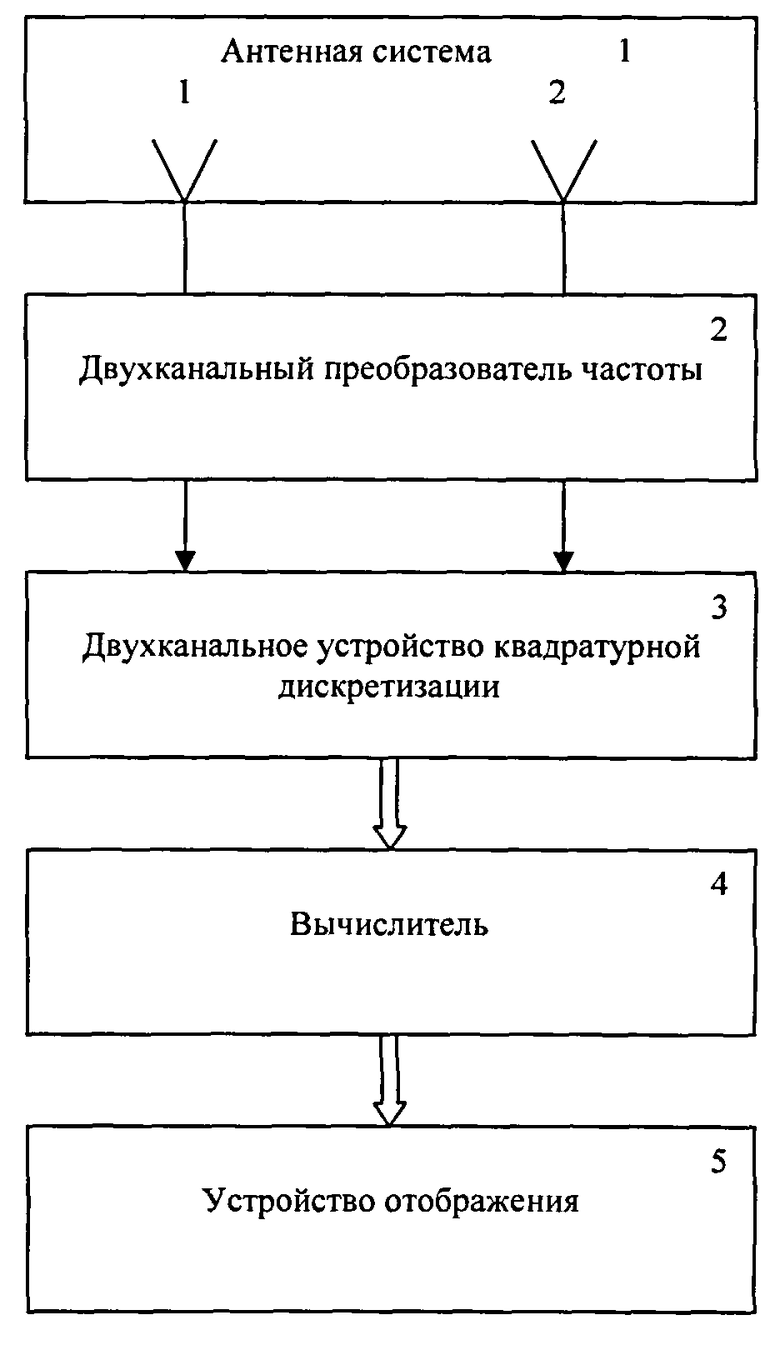
Способ обнаружения подвижных объектов, заключающийся в том, что когерентно принимают двумя пространственно разнесенными приемными каналами многолучевые радиосигналы, включающие излучаемый передатчиком подсвета прямой радиосигнал с расширенным спектром и рассеянные объектами радиосигналы этого передатчика, синхронно преобразуют принятые радиосигналы в комплексные цифровые сигналы, которые синхронно регистрируют на заданном временном интервале, из комплексных цифровых сигналов формируют комплексную двумерную взаимную корреляционную функцию (ДВКФ), зависящую как от временного, так и от частотного сдвига цифровых сигналов, сдвигают по времени комплексную ДВКФ на величину, соответствующую каждому ожидаемому направлению прихода радиосигналов, выделяют центральную двумерную часть каждой сдвинутой комплексной ДВКФ, преобразуют каждую выделенную центральную часть комплексной ДВКФ в комплексный цифровой сигнал m-го направления, который запоминают в форме векторного сигнала m-го направления, идентифицируют сформированный для совпадающего с направлением на передатчик подсвета векторный сигнал как прямой сигнал x(m′), а векторные сигналы других направлений как разведываемые сигналы x(m), отличающийся тем, что преобразуют прямой сигнал x(m′) в матричный сигнал комплексной фазирующей функции А, включающий гипотетические сигналы, рассеиваемые каждым потенциальным объектом, запоминают матричный сигнал А, для каждого m-го направления преобразуют разведываемый сигнал x(m) в сигнал комплексного частотно-временного изображения , где AH - матрица, эрмитово сопряженная с А, сигнал  запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал
запоминают и используют в качестве начального приближения, а также итерационно формируют зависящий от предыдущего решения вспомогательный матричный сигнал  , - z-й элемент вектора
, - z-й элемент вектора  , k=1,2,… - номер итерации, и сигнал очередного приближения частотно-временного изображения
, k=1,2,… - номер итерации, и сигнал очередного приближения частотно-временного изображения  , где λ - множитель Лагранжа, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения, после чего по локальным максимумам квадратов модулей элементов текущего частотно-временного изображения
, где λ - множитель Лагранжа, до тех пор, пока энергия разности текущего и запомненного предыдущего частотно-временных изображений не достигнет заданного малого значения, после чего по локальным максимумам квадратов модулей элементов текущего частотно-временного изображения  определяют число рассеянных радиосигналов m-го направления и фиксируют значения временной задержки, доплеровского сдвига и направления прихода каждого радиосигнала, по которым выполняют обнаружение и определение пространственных координат подвижных объектов.
определяют число рассеянных радиосигналов m-го направления и фиксируют значения временной задержки, доплеровского сдвига и направления прихода каждого радиосигнала, по которым выполняют обнаружение и определение пространственных координат подвижных объектов.
| СПОСОБ ПАССИВНОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2011 |
|
RU2471199C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ПРОСТРАНСТВЕННОЙ ЛОКАЛИЗАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ | 2010 |
|
RU2444755C1 |
| МЕТКА РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ ОБЪЕКТА И СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И КОНТРОЛЯ ОБЪЕКТОВ | 2007 |
|
RU2371734C2 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКОВ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ ДЕКАМЕТРОВОГО ДИАПАЗОНА | 2009 |
|
RU2408895C2 |
| Сборная железобетонная крепь для горных выработок | 1957 |
|
SU112446A1 |
| JP 6213943 A, 05.08.1994 | |||
| US 5923285 A1, 29.03.2006 | |||
| WO 2003079041 A3, 25.09.2003 | |||
| EP 1471364 A2, 27.10.2004 | |||

