Изобретение относится к области медицины, а именно к медицинской технике и может быть использовано в спинальной хирургии для интраоперационного ориентирования и корректировки при установке винтов систем транспедикулярной фиксации в целевые позвонки в режиме реального времени.
Из уровня техники известно устройство для позиционирования навигационной референтной рамки при закрытых хирургических вмешательствах на позвоночнике [1. Патент РФ на полезную модель №185377, МПК А61В 17/56 (2006.01), A61N 5/067 (2006.01), опубликовано 03.12.2018 Бюл. №34]. Это устройство содержит опорный узел, жестко соединенный, с одной стороны, с элементами крепления относительно тела пациента, с другой стороны, с фиксатором положения навигационной референтной рамки в пространстве, включающим винт. Опорный узел выполнен в виде упора цилиндрической формы для контактного соединения с телом пациента. Элементы крепления выполнены в виде изогнутого кронштейна, закрепляющегося с двух сторон от пациента за противоположные края операционного стола. При этом с противоположной стороны от упора фиксатор жестко соединен с лазерным излучателем, вертикально ориентированным перпендикулярно плоскости спины пациента.
Известное техническое решение [1] обеспечивает возможность точного проведения инструментов и имплантантов через кожу и подлежащие мягкие ткани к позвоночнику под контролем интраоперационной оптической 3D-компьютерно-томографической (КТ) навигации.
Однако, данная установка [1] не позволяет оценить, на какой угол отклоняется вводимый инструмент, она лишь позволяет не отклониться от заданной заранее точки. При этом, в случае установки винтовых систем (транспедикулярных винтов), операция может завершиться неудачно, поскольку в одну и ту же точку можно установить винт под практически произвольным углом, что может привести к серьезным техническим и неврологическим осложнениям.
Из уровня техники известно также устройство для пассивной навигации медицинского инструмента [2. Патент РФ на изобретение №2569720, МПК А61В 19/00 (2006.01), опубликовано 27.11. 2015 Бюл. №33]. Это устройство [2] включает, по меньшей мере, один траекторный указатель, закрепленный посредством кольцевого зажима в окне, образованном пересечением направляющих пазов в дугообразных кронштейнах. Кронштейны установлены с возможностью поворота в двух взаимно перпендикулярных вертикальных плоскостях на основании в виде кольца с крепежными элементами. Зажим выполнен в виде трех коаксиальных втулок, соединенных резьбой, из которых внутренняя и промежуточная имеют в нижней части буртик для размещения на них направляющих соответственно нижнего и верхнего кронштейнов. При этом внутренняя втулка снабжена выступающей частью над двумя другими и выполнена с возможностью размещения в ней траекторного указателя. Траекторный указатель выполнен в виде съемной трубки с внутренним диаметром, обеспечивающим беспрепятственный проход медицинского инструмента, и имеет опорный фланец для установки на торце внутренней втулки зажима. Крепежные элементы выполнены в виде ремешков с отверстиями для крепления в основании.
Это устройство позволяет повысить точность позиционирования медицинского инструмента и возможность смены последнего в ходе операции без замены устройства для навигации, что расширяет его функциональные возможности. Данное устройство позволяет механически точно выставить угол фиксации.
Однако в аналоге [2] позиционирование производится механически, в ходе движения по направляющим. Это, во-первых, снижает свободу движения инструмента, которым производится манипуляция, поскольку траекторных указателей - ограниченное количество и они жестко привязаны к костным структурам целевого позвонка, а во-вторых, увеличивает количество деталей используемых в устройстве, тем самым, усложняя конструкцию самого устройства, что приводит к усложнению процесса его использования. Также при использовании данного комплекса, нельзя осуществить точный контроль за углом введения винтовой системы в целевой позвонок в режиме реального времени.
Из уровня техники известен индивидуальный навигационный направитель для имплантации винтовых систем в позвоночник [3. Патент РФ на полезную модель №198660, МПК А61В 17/00 (2006.01), А61В 34/20 (2016.01), опубликовано 21.07.2020 Бюл. 21], который является близким к заявляемому устройству по достигаемому результату и взят за прототип. В этом устройстве «индивидуальный навигационный направитель» создается на основании данных компьютерной томографии позвоночника с помощью аддитивных технологий. В устройстве [3] навигационный направитель выполнен в виде каркаса, соединяющего два билатерально расположенных опорных элемента, повторяющих рельеф планируемых зон сопоставления с позвонком. Опорные элементы соединены с тубусами-направителями, выполненными в виде полых цилиндров и установленными соосно запланированной траектории имплантации винтовых систем. На вершине каркаса установлен фиксирующий элемент, внутренняя поверхность которого повторяет рельеф остистого отростка позвонка. Устройство позволяет повысить надежность фиксации фиксирующего элемента, исключить возможность смещения в сагиттальной и аксиальной плоскостях, обеспечить сохранение запланированной траектории имплантации винтовых систем в позвоночник, исключить риск перфорации кости и повреждения окружающих анатомических структур, повысить безопасность оперативного вмешательства.
Однако несмотря на то, что известное устройство [3] позволяет повысить точность введения винтовых систем в позвоночник, оно не является универсальным, оно четко персонализировано. Кроме того, устройство по прототипу из-за ограничения свободы движения инструмента-проводника при его введении по тубусу-направителю, не позволяет в режиме реального времени, с большой точностью осуществить коррекцию угла и глубины введения инструмента-проводника в целевые позвонки. При этом использование данного устройства требует создания индивидуальных навигационных направителей для каждого из целевых позвонков, что создает значительное неудобство в применении такого направителя. Индивидуальный направитель является одноразовым в применении, что также является отрицательным моментом в использовании. Как отмечено выше для создания устройства по прототипу [3] требуется доступ к аддитивным технологиям, что значительно удорожает это устройство и усложняет его использование, так как требуется привлечение высококвалифицированных специалистов из других областей техники, тем самым, значительно увеличивает стоимость устройства при его применении.
Таким образом, вышеуказанные аналоги, не позволяют в режиме реального времени определять углы отклонения инструмента-проводника, делая невозможным проведение интраоперационной коррекции процесса формирования каналов введения, либо позволяют делать это с большим ограничением точности.
Технической проблемой является отсутствие универсального навигационного комплекса, удобного при эксплуатации, обеспечивающего точность введения транспедикулярных винтов и снижающего возможность некорректного введения винтовых систем в тело целевого позвонка. Техническим результатом, достигаемым при решении технической проблемы, является создание универсального, удобного при эксплуатации навигационного комплекса, обеспечивающего интраоперационную корректировку (ориентирование) при установке винтовых систем в целевые позвонки и проведение в режиме реального времени контроля и коррекции углов, и глубины введения инструмента-проводника, формирующего штрих-каналы, при одновременном уменьшении стоимости и минимизировании риска перфорации кости позвонка и повреждения окружающих анатомических структур.
Технический результат достигается следующим образом. Заявляемый комплекс, как и прототип содержит навигационный направитель, инструмент-проводник, предназначенный для формирования штрих-каналов для винтовых систем, устанавливаемых в целевые позвонки. В отличие от прототипа навигационный направитель выполнен в виде корпуса-ручки. Внутри корпуса-ручки размещена печатная плата, на которой установлены соединенные между собой электронный гироскоп и микроконтроллер. Микроконтроллер соединен с кнопкой фиксации нулевой точки, встроенной в корпус-ручку, и персональным компьютером. Кроме того, корпус-ручка механически связан с инструментом-проводником, ориентация рабочей части которого согласована с выходными данными гироскопа. При этом на рабочей части инструмента-проводника нанесены метки, позволяющие оценить глубину его введения в целевой позвонок.
В частном случае корпус навигационного направителя выполнен в виде корпуса-ручки, имеющего съемную крышку.
В частном случае в боковой поверхности корпуса-ручки выполнены соответствующие прорези и пазы для установки кнопки фиксации нулевой точки и размещения проводов USB.
В частном случае в основании корпуса ручки выполнено отверстие с резьбой для установки инструмента-проводника.
В частном случае инструмент-проводник с одного конца имеет резьбовую часть с буртиком для соединения с корпусом-ручкой, а на другом конце, являющемся рабочей частью инструмента-проводника, нанесены метки с шагом не более 5 мм.
Из уровня техники в общедоступных источниках информации не выявлены навигационные комплексы (или устройства), для интраоперационного ориентирования при установке винтовых систем транспедикулярной фиксации в целевые позвонки, характеризующиеся той же совокупностью признаков, что и заявляемый комплекс. Это подтверждает новизну заявляемого комплекса.
Из уровня техники не обнаружены навигационные комплексы, обеспечивающие увеличение точности установки винтовых систем транспедикулярной фиксации в целевые позвонки под заранее заданными углами, с одновременной возможностью быстрой и контролируемой коррекции углов и глубины введения инструмента-проводника, формирующего штрих-каналы (каналы-проводники). Это, в свою очередь, минимизирует риск перфорации костных структур целевого позвонка(ов) и уменьшает риск повреждения нервных структур в области введения транспедикулярных винтов (спинной мозг, корешки).
Изобретение для специалиста явным образом не следует из уровня техники и соответствует, по мнению заявителей, требованиям критерия патентоспособности «изобретательский уровень».
Техническая суть заявляемого комплекса поясняется чертежами, где:
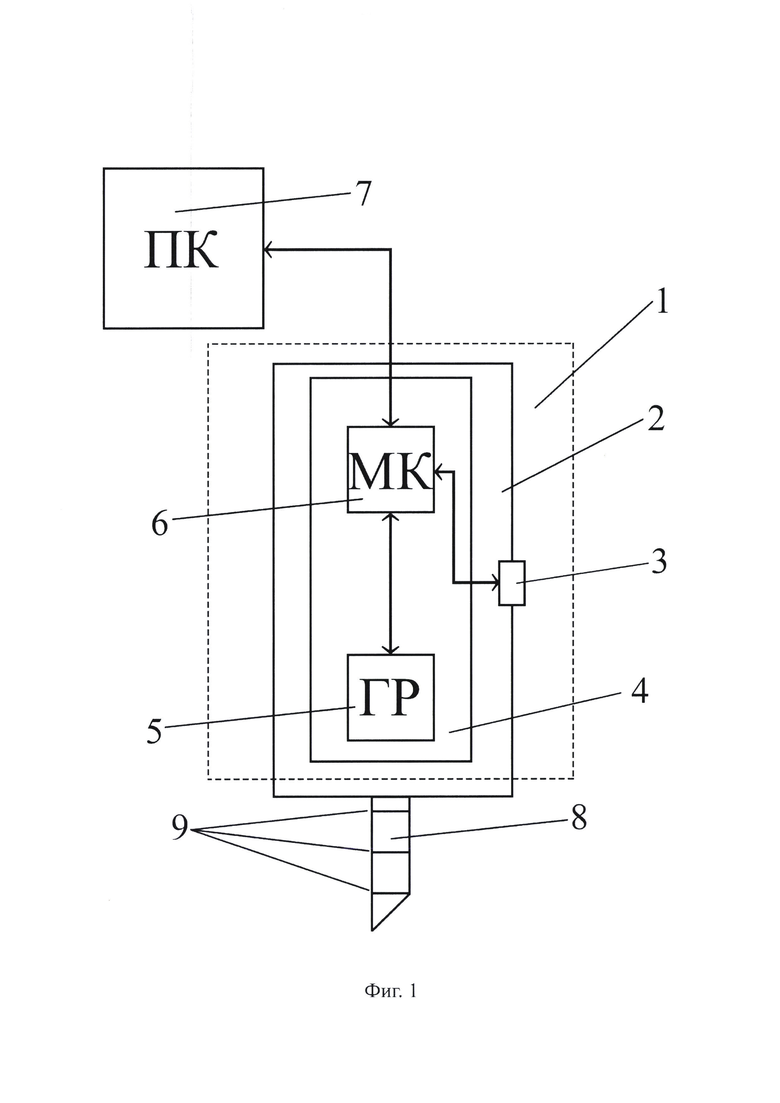
на фиг. 1 представлена структурная схема навигационного комплекса для интраоперационного ориентирования при установке винтовых систем транспедикулярной фиксации в целевые позвонки;
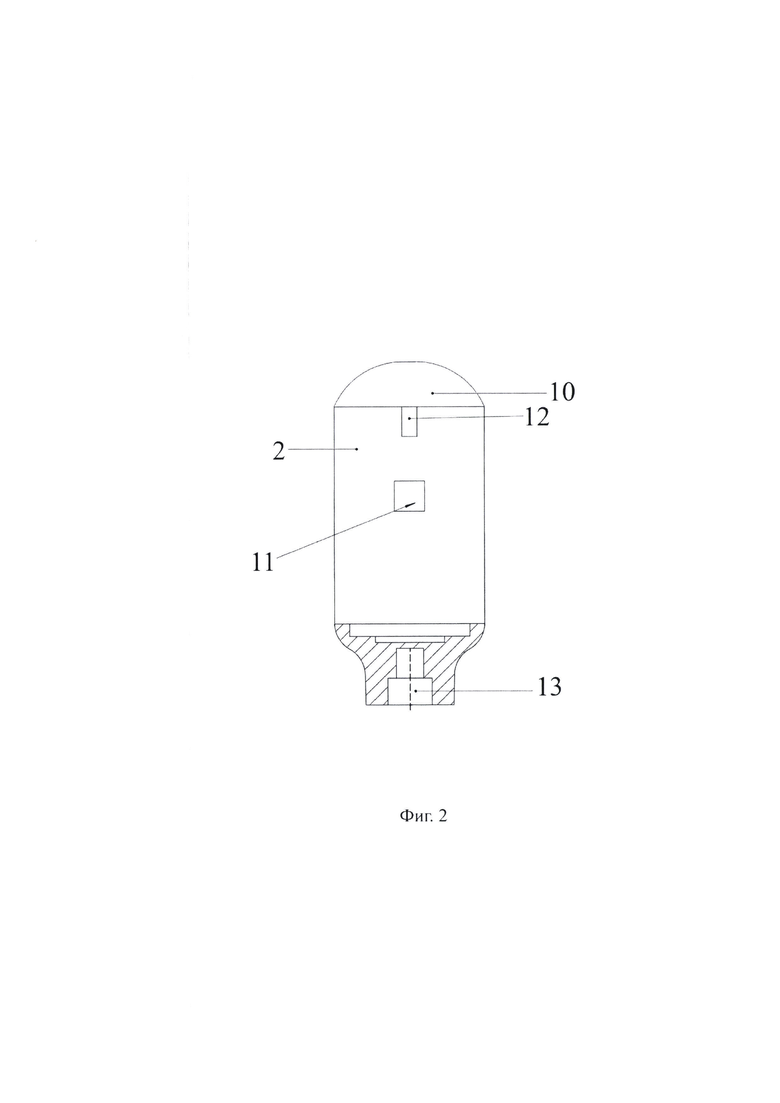
на фиг. 2 показан пример конкретного выполнения корпуса-ручки навигационного направителя;
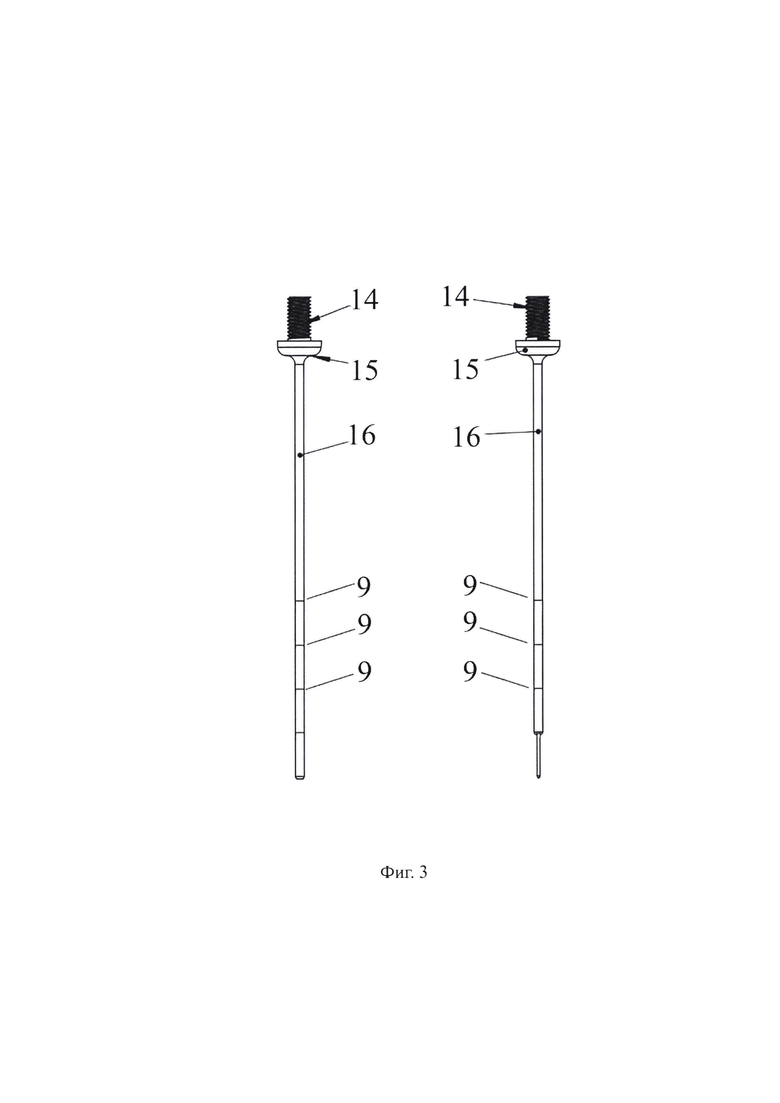
на фиг. 3 показан пример выполнения инструмента-проводника для формирования штрих-каналов (каналов-проводников).
На фигурах приняты следующие обозначения. На фиг. 1 показаны навигационный направитель 1, выполнен в виде корпуса-ручки 2 с кнопкой 3 фиксации нулевой точки. На печатной плате 4 установлены соединенные между собой электронный гироскоп 5 и микроконтроллер 6. Микроконтроллер 6 соединен с персональным компьютером 7 и кнопкой 3 фиксации нулевой точки. Корпус-ручка 2 механически связан с инструментом-проводником 8, ориентация рабочей части которого согласована с выходными данными электронного гироскопа 5. При этом на рабочей части инструмента-проводника 8 нанесены метки 9, позволяющие оценить глубину его введения в целевой позвонок.
На фиг. 2 показан корпус-ручка 2, имеющий съемную крышку 10. В боковой поверхности корпуса-ручки 2 выполнен паз 11 для установки кнопки 3 фиксации нулевой точки и прорезь 12 для размещения проводов USB, соединяющих персональный компьютер 7 с микроконтроллером 6. В дне корпуса-ручки 2 выполнено отверстие 13 с резьбой для соединения с инструментом-проводником 8.
На фиг. 3 показан инструмент-проводник 8, выполненный с одного конца с резьбой 14 и буртиком 15, а на другом конце, являющемся рабочей частью 16, имеет метки 9, позволяющие оценить глубину его введения в целевой позвонок.
Работа заявляемого навигационного комплекса показана на примере конкретного выполнения. В примере конкретного выполнения электронный гироскоп 5 выполнен в виде платы с установленной микросхемой MPU-6050 и минимальной обвязкой. В качестве платы микроконтроллера 6 взята плата Arduino nano на микросхеме ATMEGA. Микроконтроллер 6 обрабатывает показания от электронного гироскопа 5 и передает их на персональный компьютер 7 посредством проводного соединения USB. Программное обеспечение персонального компьютера 7 выполняет функции обработки получаемых данных с микроконтроллера 6, расчета необходимых параметров и вывода их на экран дисплея в виде числовых и графических элементов. Инструмент-проводник 8 выполнен из безопасного для тканей человека металла или сплава металлов. На рабочей части инструмента-проводника 8 выполнены метки 9 с шагом 4 мм.
Перед началом операции производится предоперационное планирование установки винтовых систем (транспедикулярных винтов). Данное планирование проводят, используя предоперационные данные СКТ или МРТ позвоночника. Во время предоперационного планирования, при помощи программы просмотра медицинских изображений стандарта DICOM PACS (RadiAnt DICOM Viewer), определяют ключевые точки введения винтовых систем, углы введения винтов в двух взаимоперпендикулярных плоскостях для каждого из вводимых винтов.
Перед началом операции съемный инструмент-проводник 8 стерилизуется, а собранная корпус-ручка 2 помещается в стерильный рукав, после чего инструмент-проводник 8 соединяют с корпус-ручкой 2 при помощи резьбового соединения 13, в результате чего, инструмент-проводник 8 и корпус-ручка 2 с встроенным в нее гироскопом 5 и микропроцессором 6 становятся единым комплексом, обеспечивающим геометрическую вертикальность инструмента-проводника 8 с выходными данными о вертикальности электронного гироскопа 5. Микроконтроллер 6 подключается к персональному компьютеру 7, посредством кабеля помещенного также в стерильный рукав. Электронный гироскоп 5, микропроцессор 6 и персональный компьютер 7, оснащенные специальными программами, предназначены для визуализации угла отклонения инструмента-проводника 8 от запланированного угла введения каждого из вводимых винтов в двух взаимоперпендикулярных плоскостях в режиме реального времени.
Во время операции, согласно данным предоперационного планирования, под контролем аппарата ЭОП (электронно-оптического преобразователя), конец инструмента-проводника 8 навигационного комплекса устанавливают в ключевую точку введения транспедикулярного винта. При помощи программы, установленной на ПК 7, навигационный комплекс устанавливают в строго вертикальном положении относительно горизонтальной плоскости целевого позвонка. Данное положение навигационной системы фиксируется как «нулевое» при помощи специальной кнопки 3 фиксации нулевой точки, встроенной в корпус-ручку 2. Дальнейшее измерение запланированных углов введения транспедикулярных винтов, проводят относительно этого «нулевого» положения навигационного комплекса с помощью электронного гироскопа 5. Далее через ножку дуги позвонка при помощи предлагаемого навигационного комплекса, начинают формировать штрих-канал для введения транспедикулярного винта, контролируя и корректируя заданные углы направления и глубину введения инструмента-проводника 8 в режиме реального времени. Дополнительный финальный контроль введения проводят при помощи электронно-оптического преобразователя (ЭОП), то есть осуществляется двойной контроль проведения транспедикулярных винтов через костные структуры позвонка.
Таким образом, заявляемый навигационный комплекс для интраоперационного контроля и коррекции (ориентирования) при установке винтовых систем транспедикулярной фиксации в целевые позвонки увеличивает точность их установки и позволяет свести к минимуму возможность некорректной установки транспедикулярных винтов, а значит и число неврологических осложнений. Это достигается за счет обеспечения возможности в режиме реального времени контроля и коррекции углов и глубины введения инструмента-проводника, формирующего каналы-проводники.
Заявляемое изобретение является промышленно применимым. Изготовление заявляемого навигационного комплекса для интраоперационного ориентирования при установке винтовых систем транспедикулярной фиксации в целевые позвонки не вызывает трудностей у специалистов в области создания медицинской техники. Комплекс может быть неоднократно реализован с использованием общедоступных не дорогих по стоимости комплектующих элементов и блоков.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| СПОСОБ УСТАНОВКИ ВИНТОВ ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ СТАБИЛИЗАЦИИ ПОЗВОНОЧНИКА | 2015 |
|
RU2620355C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ИНСТРУМЕНТА В ХИРУРГИИ ПОЗВОНОЧНИКА НА ОТКРЫТОЙ РАНЕ | 2019 |
|
RU2726473C1 |
| Способ хирургического лечения идиопатического сколиоза позвоночника с использованием 3D прототипирования модели позвоночника для введения транспедикулярных винтов | 2024 |
|
RU2828969C1 |
| Комплект инструментов для нейрохирургии позвоночника для применения с системой хирургической навигации | 2023 |
|
RU2823108C1 |
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ СПОНДИЛОЛИСТЕЗА НА ПОЯСНИЧНО-КРЕСТЦОВОМ УРОВНЕ | 2024 |
|
RU2832968C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ БЕСПРОВОДНОЕ УСТРОЙСТВО СО СМЕННЫМИ ХИРУРГИЧЕСКИМИ ИНСТРУМЕНТАМИ ДЛЯ ИЗМЕРЕНИЯ ИХ УГЛОВ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ И ВОЗДЕЙСТВУЮЩИХ НА НИХ СИЛ И МОМЕНТОВ ПРИ ПРОВЕДЕНИИ НЕЙРОХИРУРГИЧЕСКИХ ОПЕРАЦИЙ | 2022 |
|
RU2807937C1 |
| Многофункциональное устройство со сменными хирургическими инструментами для измерения воздействующих на них сил и моментов при проведении нейрохирургических операций | 2019 |
|
RU2736162C2 |
| СПОСОБ ВЫПОЛНЕНИЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ НИЖНЕШЕЙНОГО ОТДЕЛА ПОЗВОНОЧНИКА | 2018 |
|
RU2678467C1 |
| СПОСОБ ВВЕДЕНИЯ ТРАНСПЕДИКУЛЯРНЫХ ВИНТОВ В ГРУДНОМ И ПОЯСНИЧНОМ ОТДЕЛАХ ПОЗВОНОЧНИКА | 2020 |
|
RU2747071C1 |
Изобретение относится к области медицины и может быть использовано в спинальной хирургии для интраоперационного ориентирования и корректировки при установке винтов систем транспедикулярной фиксации в целевые позвонки в режиме реального времени. Навигационный комплекс содержит навигационный направитель, инструмент-проводник, предназначенный для формирования каналов-проводников для винтовых систем, устанавливаемых в целевые позвонки. Навигационный направитель выполнен в виде корпуса-ручки, внутри которого размещена печатная плата. На печатной плате установлены соединенные между собой электронный гироскоп и микроконтроллер. Микроконтроллер соединен с кнопкой фиксации нулевой точки, встроенной в корпус, и персональным компьютером. Корпус-ручка механически связан с инструментом-проводником, ориентация рабочей части которого согласована с выходными данными гироскопа. На рабочей части инструмента-проводника нанесены метки, позволяющие оценить глубину его введения в целевой позвонок. Достигается точность введения транспедикулярных винтов в целевые позвонки за счет контроля и коррекции углов и глубины введения инструмента-проводника в режиме реального времени. 4 з.п. ф-лы, 3 ил.
1. Навигационный комплекс для интраоперационного ориентирования при установке винтовых систем транспедикулярной фиксации в целевые позвонки, содержащий навигационный направитель, инструмент-проводник, предназначенный для формирования каналов-проводников для винтовых систем, устанавливаемых в целевые позвонки, отличающийся тем, что навигационный направитель выполнен в виде корпуса-ручки, внутри которого размещена печатная плата, на которой установлены соединенные между собой электронный гироскоп и микроконтроллер, при этом микроконтроллер соединен с кнопкой фиксации нулевой точки, встроенной в корпус, и персональным компьютером, кроме того, корпус-ручка механически связан с инструментом-проводником, ориентация рабочей части которого согласована с выходными данными гироскопа, при этом на рабочей части инструмента-проводника нанесены метки, позволяющие оценить глубину его введения в целевой позвонок.
2. Навигационный комплекс по п. 1, отличающийся тем, что корпус навигационного направителя выполнен в виде корпуса-ручки, имеющего съемную крышку.
3. Навигационный комплекс по п. 1, отличающийся тем, что в боковой поверхности корпуса-ручки выполнены соответствующие прорези и пазы для установки кнопки фиксации нулевой точки и размещения проводов USB.
4. Навигационный комплекс по п. 1, отличающийся тем, что в основании корпуса-ручки выполнено отверстие с резьбой для установки инструмента-проводника.
5. Навигационный комплекс по п. 1, отличающийся тем, что инструмент-проводник на одном конце имеет резьбовую часть с буртиком для соединения с корпусом-ручкой, а на другом конце, являющемся рабочей частью, нанесены метки с шагом не более 5 мм.
| RU 198660 U1, 21.07.2020 | |||
| УСТРОЙСТВО ДЛЯ ПУСКА ЧАСТОТНОРЕГУЛИРУЕМОГО ЭЛЕКТРОПРИВОДА | 0 |
|
SU208817A1 |
| ДВУХКООРДИНАТНОЕ ГРАФИЧЕСКОЕ УСТРОЙСТВО | 0 |
|
SU200909A1 |
| US 6755839 B2, 29.06.2004. | |||

