Настоящее изобретение предназначено для определения положения внешнего экрана реактора дегидрирования пропана относительно горизонта.
В настоящее время контроль вертикальности экранов проводится в ручном режиме с помощью веревки и отвеса, и для этого требуется минимум два человека, один из которых должен находиться внутри реактора на высоте. Это создает риски для жизни и здоровья исполнителей.
Из уровня техники известно устройство для определения вертикальности поверхности стен [CN 213874303 U, опубл. 17.12.2020], которое содержит нижнюю пластину, механизм регулировки и механизм обнаружения. Механизм регулировки расположен в верхней части нижней пластины, а механизм обнаружения установлен на механизме регулировки.
Преимуществом известного устройства является возможность его установки на горизонтальной поверхности без необходимости монтирования на отвесных поверхностях. Показания отклонения от вертикальности отображаются на экране ПК во время проведения измерения.
Недостатком известного устройства определения вертикальности поверхности стен является сложность его использования для определения вертикальности цилиндрических поверхностей на больших длинах и необходимость присутствия человека непосредственно возле нижней пластины устройства во время проведения измерений.
Из уровня техники известен лазерный отвес [RU 2591741, дата публикации: 20.07.2016 г.], который используется для контроля соосности вертикальных отверстий, горизонтальности, параллельности, перпендикулярности и взаимного расположения поверхностей при сборке крупногабаритных изделий. Этот отвес содержит лазер, оптическую систему, которая создает стабильное базовое направление путем образования кольцевой структуры лазерного пучка, контрольный элемент (марки триппель-призма) и измерительный блок: визуальный и с фотоприемником (цифровой камерой, подключенной к компьютеру).
Преимуществом известного технического решения является создание стабильных базовых вертикальных направлений на больших расстояниях, в частности на больших глубинах, и исключение необходимости присутствия наблюдателя на больших глубинах.
Однако недостатком известного технического решения является необходимость установки контрольных элементов (марок) на больших глубинах (в труднодоступных местах) перед проведением измерений отклонений.
В качестве прототипа было выбрано устройство для определения вертикальности конструкций [заявка 2004116537/22, дата публикации: 10.09.2004 г.], которое содержит цилиндрический корпус из токопроводящего материала. На корпусе жестко закреплен держатель с лампой накаливания, другой конец которого соединен с отвесом, состоящим из гибкого токопроводящего провода, на нижнем конце которого закреплен груз в виде цилиндрического гальванического элемента, являющегося источником питания.
Продольная ось источника питания и гибкий провод отвеса расположены по продольной осевой линии корпуса. Конструкция корпуса присоединяется посредством закрепляющего приспособления.
При превышении допустимого отклонения конструкции от вертикали батарейка касается стенки корпуса, цепь замыкается и лампа загорается, информируя об ошибке.
Преимуществом прототипа является высокая точность определения вертикальности конструкций. Однако, в случае определения положения внешнего экрана реактора дегидрирования пропана, прототип не может достичь технического результата, так как длина цилиндрического корпуса должна соответствовать длине внешнего экрана. Кроме того, прототип способен лишь сигнализировать об отклонении от вертикали, превышающем заранее известное значение, а не определять фактические значения отклонения. Из-за сложности монтажа цилиндрических экранов требуется контролировать отклонение оси экрана от вертикальности. Для определения положения экранов требуется проводить измерения с высокой точностью, вследствие чего возникает необходимость в доработке существующих решений.
Техническая проблема, на решение которой направлено изобретение, заключается в необходимости улучшения эксплуатационных характеристик роботизированного комплекса для определения положения внешних экранов реакторов дегидрирования пропана.
Технический результат, на достижение которого направлено изобретение, заключается в исключении рисков для жизни и здоровья человека, ускорении процесса измерения и увеличении точности измерений за счет определения положения внешних экранов реакторов дегидрирования пропана при помощи роботизированного комплекса.
Сущность изобретения заключается в следующем.
Роботизированный комплекс для определения положения внешних экранов реакторов дегидрирования пропана, содержащий механизм для линейного перемещения отвеса, отвес и электронное вычислительное устройство, определяющее показание с устройства измерения линейных перемещений в момент разрыва цепи между отвесом и стенкой внешнего экрана. В отличие от прототипа, механизм для линейного перемещения отвеса оснащен устройством измерения линейных перемещений, а электронное вычислительное устройство выполнено с возможностью получения данных с устройства измерения линейных перемещений в момент разрыва цепи между отвесом и стенкой внешнего экрана и их объединения в базу данных.
Для решения задачи точного определения положения внешних экранов реакторов дегидрирования пропана разработан роботизированный комплекс для измерения радиальных отклонений образующих цилиндрической поверхности внешнего экрана от вертикали. Устройство состоит из отвеса, опускаемого на тросе внутрь внешнего экрана по одной или нескольким из образующих цилиндрической поверхности, механизма, отвечающего за линейное перемещение отвеса в радиальном направлении, устанавливаемого на верхнем торце внешнего экрана, и электронного вычислительного устройства, которое получает, обрабатывает и анализирует данные. Требуется определить показания датчика линейного перемещения в момент разрыва электрической цепи между отвесом, опускаемым на металлическом тросе, и стенкой внешнего экрана. Процедура измерения отклонений от вертикали повторяется по нескольким попарно диаметрально расположенным и равноразнесенным образующим цилиндрической поверхности внешнего экрана. Измерения проводятся в автоматическом режиме по окружности и образующим.
Механизм перемещения отвеса оснащен устройством линейного перемещения, которое обеспечивает высокую точность производимых измерений за счет установленной в его корпусе электроники с аналого-цифровыми преобразователями, подключенными к датчику и обеспечивающими высокую точность и скорость измерений. В частности, определение линейных значений может выполняться с точностью 0,001 мм и выше, а скорость измерения - от 100 измерений в секунду, что дополнительно повышает точность определения положения внешних экранов реакторов дегидрирования пропана. Стоит отметить, что существуют реакторы дегидрирования пропана различных типоразмеров, и, следовательно, величины длин внешних экранов варьируются от 14 до 16 метров. Для измерения положения таких экранов нет необходимости в калибровке датчика при каждом измерении отклонений от вертикали.
Электронное вычислительное устройство получает данные с устройства определения линейных перемещений и сигнала в момент "отрыва" отвеса от внутренней стенки внешнего экрана, а также объединяет их в базу данных, что обеспечивает возможность соотнесения данных величины отклонения от вертикали и номера образующей. Измерения могут производиться постоянно с передачей и записью в базу данных или результат может выдаваться по окончанию измерений. Ключевой информацией является показание устройства определения линейных перемещений в момент разрыва электрической цепи между отвесом и стенкой экрана. Электронное вычислительное устройство позволяет определить положение внешнего экрана в автоматическом режиме, проанализировав совокупность полученных данных на разных направляющих.
Изобретение может быть выполнено из известных материалов с помощью известных средств, что свидетельствует о его соответствии критерию патентоспособности «промышленная применимость».
Изобретение характеризуется ранее неизвестной из уровня техники совокупностью существенных признаков, отличающейся тем, что устройство для перемещения отвеса оснащено устройством измерения линейных перемещений и реализовано таким образом, чтобы обеспечить электрическую связь между отвесом и внешним экраном, а электронное вычислительное устройство выполнено с возможностью получения данных с устройства измерения линейного перемещения и возможностью фиксации факта разрыва гальванической развязки. Эти данные объединяются в базу данных, анализируются и используются для определения положения внешнего экрана.
Благодаря этому обеспечивается достижение технического результата, заключающегося в исключении рисков для жизни и здоровья человека, ускорении процесса измерения и увеличении точности измерений за счет определения положения внешних экранов реакторов дегидрирования пропана при помощи роботизированного комплекса, тем самым улучшаются эксплуатационные характеристики роботизированного комплекса для определения положения внешних экранов реакторов дегидрирования пропана.
Изобретение обладает ранее неизвестной из уровня техники совокупностью существенных признаков, что свидетельствует о его соответствии критерию патентоспособности «новизна».
Из уровня техники не известны отличительные признаки изобретения. Ввиду этого изобретение соответствует критерию патентоспособности «изобретательский уровень».
Изобретение поясняется следующими фигурами.
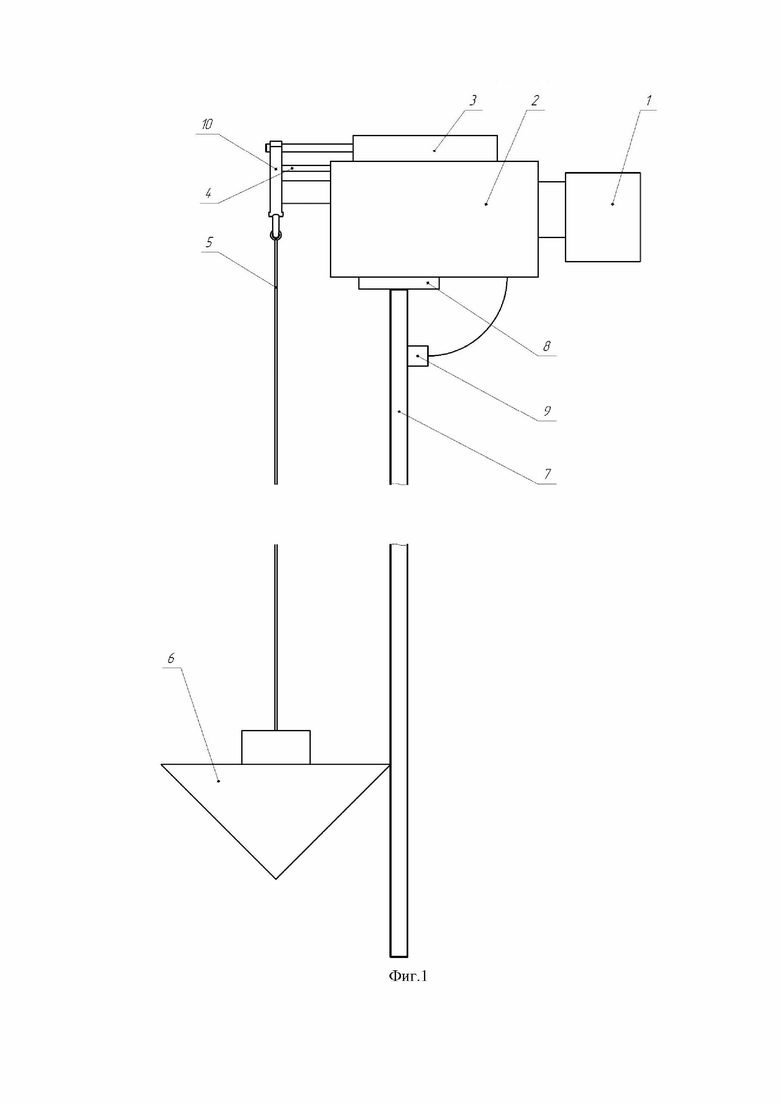
Фиг. 1 - роботизированный комплекс для определения положения внешнего экрана реактора дегидрирования пропана, установленный на корпус реактора дегидрирования пропана во время остановочного ремонта (основные компоненты).
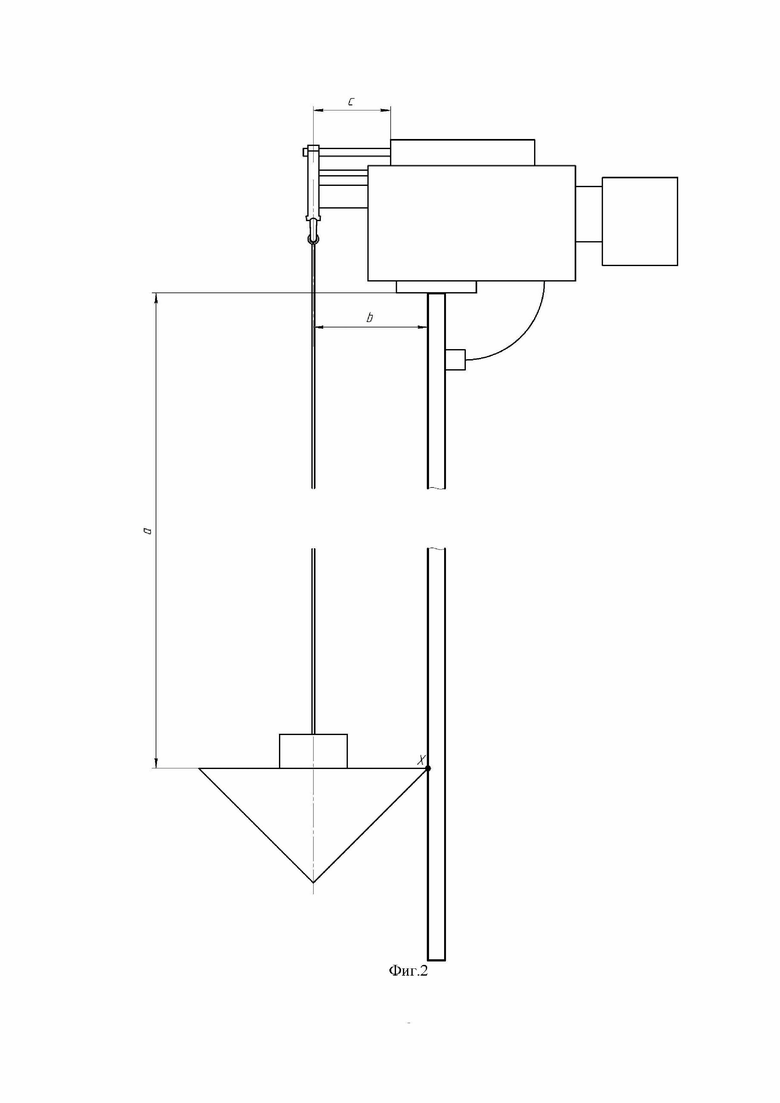
Фиг. 2 - роботизированный комплекс для определения положения внешнего экрана реактора дегидрирования пропана, установленный на корпус реактора дегидрирования пропана во время остановочного ремонта (основные размеры).
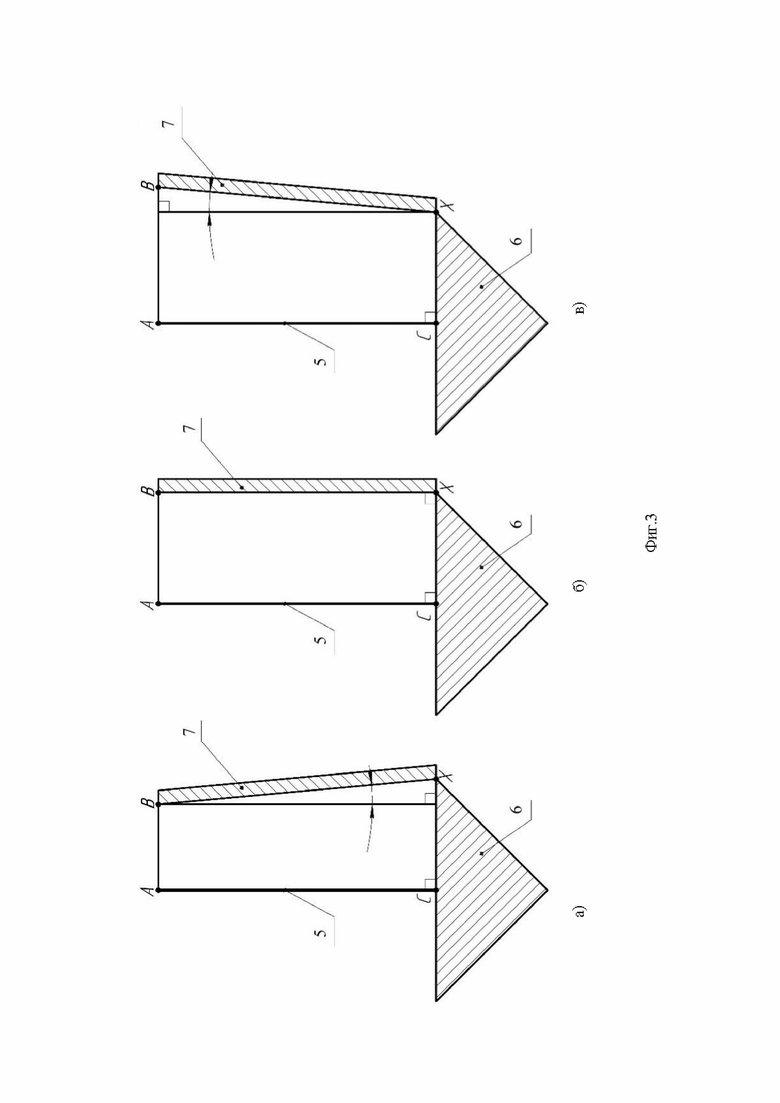
Фиг. 3а-в возможные варианты расположения отвеса относительно стенки экрана в момент разрыва электрической цепи.
Для иллюстрации возможности реализации и более полного понимания сути изобретения ниже представлен вариант его осуществления, который может быть любым образом изменен или дополнен, при этом настоящее изобретение ни в коем случае не ограничивается представленным вариантом.
Роботизированный комплекс для определения положения внешнего экрана реактора дегидрирования пропана, изображенный на фиг. 1-3, включает следующие позиции:
груз;
1 - электродвигатель;
2 - механизм для линейного перемещения отвеса;
3 - устройство измерения линейных перемещений;
4 - пружина;
5 - стальной трос;
6 - отвес;
7 - стенка внешнего экрана;
8 - диэлектрическая прокладка;
9 - контакт с поверхностью внешнего экрана;
10 - кронштейн крепления троса.
Роботизированный комплекс для определения положения внешнего экрана реактора дегидрирования пропана состоит из металлического отвеса 6 конической формы и устройства 3 измерения линейных перемещений, расположенных на механизме для их перемещения в горизонтальной плоскости, приводимом в движение при помощи электродвигателя 1.
Механизм 2 для линейного перемещения отвеса с устройством 3 измерения линейных перемещений соединен с отвесом 6 с использованием стального троса 5 через кронштейн 10 крепления троса.
В зависимости от типоразмера реактора дегидрирования пропана присутствует возможность регулировки высоты а, на которую опускается отвес 6 на стальном тросе 5, что позволяет исключить необходимость изготовления моделей под каждый экран, отличающийся от прочих своей высотой.
Принцип работы устройства заключается в следующем.
Устройство закрепляется наверху смонтированного внешнего экрана реактора дегидрирования пропана через диэлектрическую прокладку 8, а от механизма 2 для линейного перемещения отвеса реализован контакт 9 с поверхностью стенки 7 внешнего экрана, образующий электрическую цепь между этим контактом и отвесом.
Устройство монтируется с использованием калибра таким образом, что расстояние b между осью троса 5 в месте его крепления к механизму 2 и отвеса и внутренней стенкой экрана является одинаковым для измерений по всем образующим.
Далее, используя механизм 2 для линейного перемещения, кронштейн 10 крепления троса перемещается в сторону стенки 7 экрана на расстояние более половины радиуса отвеса (нулевое положение), которое также одинаково для измерений по всем образующим. Таким образом обеспечивается касание отвеса 6 и стенки 7 экрана в точке X при любом положении экрана. В этом положении известно показание с устройства 3 измерения линейных перемещений и расстояние с, на которое растянулась пружина 4 из нулевого положения. В то же время крепление устройства 3 измерения линейных перемещений к механизму 2 его перемещения реализовано таким образом, что известно расстояние от нулевого положения устройства 3 измерения линейных перемещений до внутренней стенки внешнего экрана.
Электродвигатель 1 приводит в движение механизм 2 до тех пор, пока отвес 6 не «оторвется» от поверхности, т.е. в момент времени, когда прервется гальваническая связь между отвесом 6 и стенкой 7. В этот момент времени электронное вычислительное устройство в автоматическом режиме зафиксирует показание устройства 3 измерения линейных перемещений и переведет значения, полученные с него, в расстояние от стенки 7 экрана до центра троса 5 в верхней точке экрана.
Аналогичную процедуру следует провести по нескольким попарно диаметрально расположенным и равноразнесенным образующим цилиндрической поверхности внешнего экрана.
Электронное вычислительное устройство проводит анализ проведенных измерений и выдает результат о положении экрана, его вертикальности и угле наклона относительно вертикальной оси.
Расчет угла наклона экрана вычисляется по данным, полученным с устройства 3 измерения линейных перемещений.
Разность между величинами расстояния от внутренней стенки 7 экрана до оси троса в момент разрыва электрической цепи АВ и диаметром СХ позволяет сделать вывод о положении образующей и угле ее наклона относительно вертикальной оси:
при АВ<СХ,
при АВ=СХ,
α=0°;
при АВ>СХ,
После определения угла отклонения внешнего экрана проводятся корректирующие мероприятия (возможно без снятия описанного устройства), устанавливается экран в требуемое положение, повторно проверяется и при положительных результатах монтаж экрана завершается.
Таким образом, обеспечивается достижение технического результата, заключающегося в исключении рисков для жизни и здоровья человека, ускорении процесса измерения и увеличении точности измерений за счет определения положения внешних экранов реакторов дегидрирования пропана при помощи роботизированного комплекса, тем самым улучшаются эксплуатационные характеристики роботизированного комплекса для определения положения внешних экранов реакторов дегидрирования пропана.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения положения внешнего экрана реактора дегидрирования пропана | 2024 |
|
RU2826367C1 |
| Роботизированный комплекс для измерения межэкранного зазора реактора дегидрирования пропана | 2023 |
|
RU2802155C1 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ РОБОТОТЕХНИЧЕСКОГО КОМПЛЕКСА | 2013 |
|
RU2538322C1 |
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС SCANME | 2015 |
|
RU2624874C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
Настоящее изобретение относится к комплексам для определения положения внешнего экрана реактора дегидрирования пропана. Роботизированный комплекс для определения отклонения от вертикального положения внешних экранов реакторов дегидрирования пропана содержит механизм для линейного перемещения отвеса, отвес, при этом механизм для линейного перемещения отвеса оснащен устройством измерения линейных перемещений и содержит электронное вычислительное устройство, выполненное с возможностью получения данных с устройства измерения линейных перемещений в момент разрыва цепи между отвесом и стенкой внешнего экрана и их объединения в базу данных, а от механизма для линейного перемещения отвеса реализован контакт с поверхностью стенки внешнего экрана, образующий электрическую цепь между этим контактом и отвесом. Технический результат - исключение рисков для жизни и здоровья человека, ускорение процесса измерения и увеличение точности измерений за счет определения положения внешних экранов реакторов дегидрирования пропана при помощи роботизированного комплекса. 4 з.п. ф-лы, 3 ил.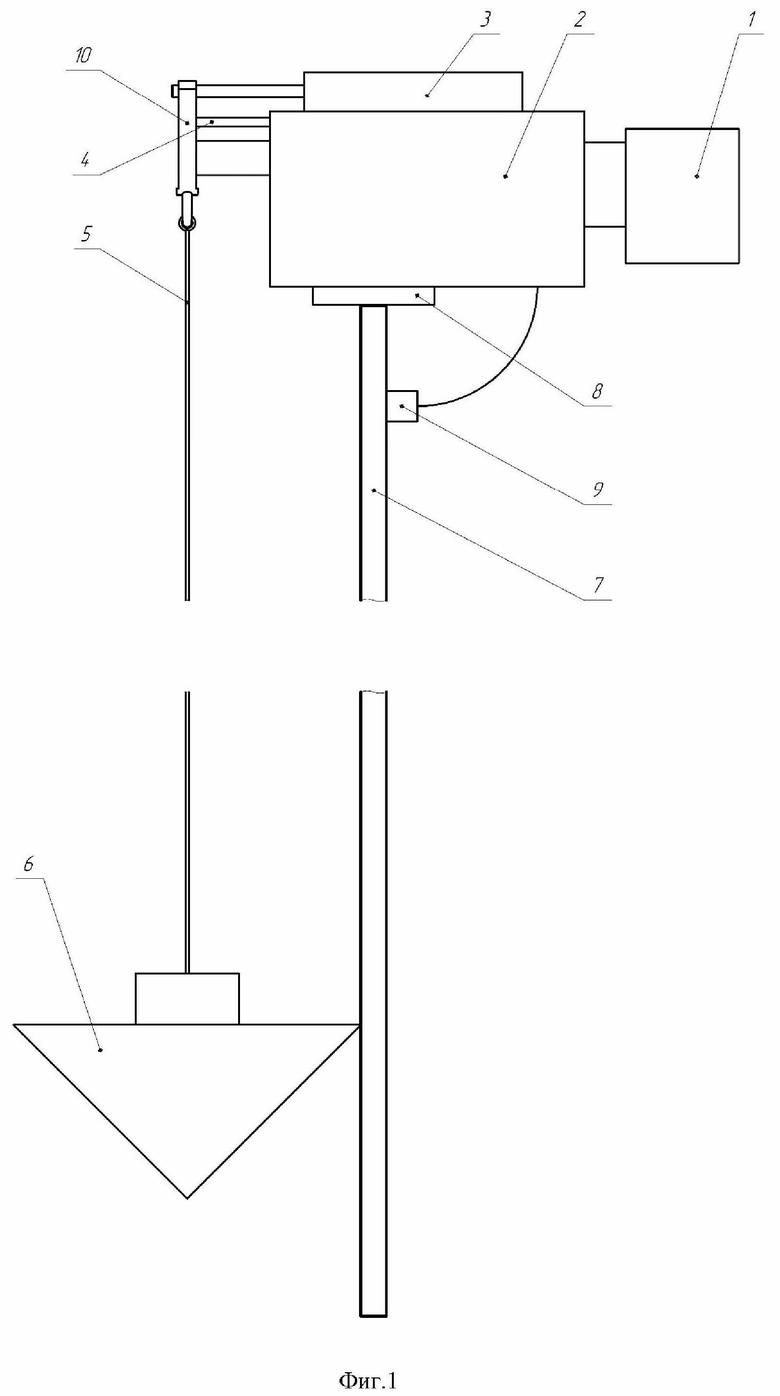
1. Роботизированный комплекс для определения отклонения от вертикального положения внешних экранов реакторов дегидрирования пропана, содержащий механизм для линейного перемещения отвеса, отвес, отличающийся тем, что механизм для линейного перемещения отвеса оснащен устройством измерения линейных перемещений и содержит электронное вычислительное устройство, выполненное с возможностью получения данных с устройства измерения линейных перемещений в момент разрыва цепи между отвесом и стенкой внешнего экрана и их объединения в базу данных, при этом от механизма для линейного перемещения отвеса реализован контакт с поверхностью стенки внешнего экрана, образующий электрическую цепь между этим контактом и отвесом.
2. Роботизированный комплекс по п. 1, отличающийся тем, что электронное вычислительное устройство с аналого-цифровыми преобразователями, подключенными к устройству измерения линейных перемещений, размещено в корпусе механизма линейного перемещения отвеса.
3. Роботизированный комплекс по п. 2, отличающийся тем, что электронное вычислительное устройство выполнено с возможностью осуществления измерения линейных значений с точностью 0,001 мм и выше и скоростью измерения более 100 измерений в секунду.
4. Роботизированный комплекс по п. 1, отличающийся тем, что электронное вычислительное устройство обеспечивает возможность соотнесения данных со всех измеряемых образующих и определения наклона внешнего экрана реактора дегидрирования пропана.
5. Роботизированный комплекс по п. 1, отличающийся тем, что электронное вычислительное устройство выполнено с возможностью сообщения отклонений по измеряемой образующей внешнего экрана реактора дегидрирования пропана.
| Приспособление для исследования материалов, в особенности сварных изделий, рентгеновскими лучами | 1933 |
|
SU40467A1 |
| Антенный коммутатор | 1945 |
|
SU69231A1 |
| Роботизированный комплекс для измерения межэкранного зазора реактора дегидрирования пропана | 2023 |
|
RU2802155C1 |
| US 20040177681 A1, 16.09.2004 | |||
| СПОСОБ КОНТРОЛЯ ВЕРТИКАЛЬНОСТИ ОБСАДНОЙ ТРУБЫ | 1997 |
|
RU2144656C1 |

