Изобретение относится к робототехнике и, в частности, к системам управления многостепенными манипуляторами, имеющими конструктивные ограничения перемещения во всех их степенях подвижности и дополнительные (избыточные) степени подвижности.
Известен способ управления шестистепенным манипулятором, имеющим блок задания программных значений, формирующий параметры перемещения рабочего инструмента манипулятора в пространстве, и вычислительное устройство, на вход которого поступают указанные параметры перемещения рабочего инструмента, а на выходе формируются программные значения всех обобщенных координат манипулятора (В.Ф. Филаретов, Ю.К. Алексеев, А.В. Лебедев. Системы управления подводными роботами. М.: Круглый год, 2001. С. 184-207).
Недостатком этого способа является то, что его использование для управления многостепенными манипуляторами (ММ) может привести ко входу отдельных степеней подвижности в ограничения или всего ММ - в особые положения, характеризуемые неоднозначностью в решении их обратных задач кинематики. При использовании этого способа для продолжения выполнения манипуляционных операций требуется мгновенно менять конфигурации ММ, обеспечивая резкие развороты (реверсы) в некоторых их степенях подвижности для сохранения заданного пространственного расположения рабочих инструментов (РИ). Это сильно снижает точность движения РИ ММ по заданным траекториям и часто приводит к аварийным ситуациям, особенно, когда указанные траектории неизвестны до начала выполнения манипуляционных операций.
Известен также способ управления манипулятором, имеющим шесть степеней подвижности, программное устройство, избыточную седьмую степень подвижности, снабженную дополнительным следящим приводом, вспомогательную систему управления и систему технического зрения, жестко связанную с абсолютной системой координат и с программным устройством, характеризующийся тем, что осуществляют формирование с помощью программного устройства входных сигналов для следящих приводов всех его шести степеней подвижности, обеспечивающих перемещение рабочего инструмента манипулятора в абсолютной системе координат и передачу с помощью системы технического зрения в программное устройство информации о пространственных координатах в абсолютной системе координат мест обработки рабочим инструментом манипулятора, при этом дополнительный следящий привод избыточной седьмой степени подвижности выполняют с возможностью обеспечения расширенной рабочей зоны манипулятора и увеличенного его угла сервиса, а вспомогательную систему управления - с возможностью дополнительного перемещения основания манипулятора посредством избыточной степени подвижности в абсолютной системе координат, которое реализуют с учетом текущих значений его шести степеней подвижности с помощью избыточной седьмой степени подвижности, и осуществляют учет посредством программного устройства текущего перемещения в абсолютной системе координат его избыточной седьмой степени подвижности при формировании программных сигналов для шести степеней подвижности манипулятора (Патент РФ №2692360, кл. B25J 9/00. Бюл. №18, 2019). Этот способ по своей технической сущности является наиболее близким к предлагаемому изобретению и принят за прототип.
Недостатком этого способа является то, что при его использовании рабочие зоны ММ оказываются ограниченными по причине введения только одной их избыточной степени подвижности, обеспечивающей дополнительные перемещения оснований ММ только вдоль одной оси. Кроме того, этой одной избыточной степени подвижности бывает недостаточно для предотвращения появлений особых положений ММ и входа их шести степеней подвижности в ограничения. В результате снижается точность работы ММ и сохраняется возможность нарушения выполнения всех пространственных манипуляционных операций.
Задачей заявляемого изобретения является устранение указанных выше недостатков, а именно, расширение рабочих зон ММ и сохранение высокой точности выполнения всех манипуляционных операций при полном исключении появления особых положений ММ и непредсказуемых реверсов во всех их степенях подвижности.
Технический результат, который может быть получен при реализации заявляемого способа, заключается в расширении рабочих зон ММ и в сохранении высокой точности безаварийного выполнения ими всех манипуляционных операций при использовании их автоматических перемещений в трех избыточных линейных степенях подвижности, при введении которых полностью исключаются особые положения этих ММ и нежелательные реверсы во всех их степенях подвижности, связанные с выходом их степеней подвижности на ограничения.
Поставленная задача решается тем, что способ управления многостепенным манипулятором, имеющим шесть степеней подвижности, программное устройство, избыточную седьмую степень подвижности, снабженную дополнительным следящим приводом, вспомогательную систему управления и систему технического зрения, жестко связанную с абсолютной системой координат и с программным устройством, характеризующийся тем, что осуществляют формирование с помощью программного устройства входных сигналов для следящих приводов всех его шести степеней подвижности, обеспечивающих перемещение рабочего инструмента манипулятора в абсолютной системе координат и передачу с помощью системы технического зрения в программное устройство информации о пространственных координатах в абсолютной системе координат мест обработки рабочим инструментом манипулятора, при этом дополнительный следящий привод избыточной седьмой степени подвижности выполняют с возможностью обеспечения расширенной рабочей зоны манипулятора и увеличенного его угла сервиса, а вспомогательную систему управления - с возможностью дополнительного перемещения основания манипулятора посредством избыточной седьмой степени подвижности в абсолютной системе координат, отличается тем, что, основание манипулятора выполняют с возможностью его дополнительного перемещения с помощью следящего привода в восьмой линейной степени подвижности в горизонтальной плоскости, ось которой перпендикулярна оси седьмой степени подвижности, вертикальное звено манипулятора выполняют с возможностью изменения его длины с помощью следящего привода в девятой телескопической степени подвижности, ось которой совпадает с осью вертикального звена манипулятора и проходит через его основание, при этом вспомогательную систему управления выполняют с возможностью задания в начале смещения основания манипулятора в исходное положение постоянных входных сигналов для следящих приводов седьмой, восьмой и девятой степеней подвижности с учетом информации о текущих пространственных координатах исходного места обработки рабочим инструментом объектов в абсолютной системе координат, которая поступает на вход вспомогательной системы управления с выхода системы технического зрения, информации о форме возможной рабочей зоны манипулятора, которая хранится в памяти вспомогательной системы управления, а также информации о текущих значениях седьмой, восьмой и девятой степеней подвижности, обеспечивающих нахождение исходного места обработки в рабочей зоне манипулятора, программное устройство выполняют с возможностью задания в начале работы манипулятора постоянных входных сигналов для следящих приводов первых шести степеней его подвижности, исключающих столкновения манипулятора и его инструмента с объектами, причем программное устройство и вспомогательную систему управления выполняют с возможностью вычисления значений специальных функций-индикаторов, позволяющих с учетом входных сигналов для следящих приводов первых шести степеней подвижности манипулятора оценить близость этих шести степеней подвижности манипулятора к их ограничениям, близость его конфигурации - к особым положениям, характеризуемым неоднозначностью в решении его обратной задачи кинематики, а также близость рабочего инструмента - к границам рабочей зоны манипулятора, при этом программное устройство выполняют с возможностью определения той конфигурации манипулятора из нескольких допустимых, которая исключает в начале работы нахождение первых его шести степеней подвижности в ограничениях, а его конфигурацию - в особых положениях на основе вычисляемых значений специальных функций-индикаторов с учетом исходных пространственных координат и ориентации рабочего инструмента манипулятора в абсолютной системе координат в начале обработки объектов, а также с учетом текущих значений координат его седьмой, восьмой и девятой степеней подвижности и его геометрических параметров, причем при отсутствии допустимой исходной конфигурации манипулятора осуществляют перемещение всего манипулятора с учетом вычисленных значений специальных функций-индикаторов в новое положение, обеспечивающее возможность выбора допустимой исходной конфигурации, посредством совместного или раздельного изменения седьмой, восьмой и девятой степеней подвижности, при этом в начале работы переход манипулятора в исходную допустимую конфигурацию осуществляют посредством задания постоянных входных сигналов для всех девяти следящих приводов всех его степеней подвижности на выходах программного устройства и вспомогательной системы управления в течение времени, необходимого для завершения переходных процессов во всех следящих электроприводах, а вспомогательную систему управления выполняют с возможностью задания дополнительного перемещения всего манипулятора посредством седьмой, восьмой и девятой степеней подвижности в абсолютной системе координат при превышении порогового значения хотя бы одной из непрерывно рассчитываемых функций-индикаторов, это дополнительное перемещение определяется с учетом текущих значений входных сигналов для следящих приводов первых шести степеней подвижности с возможностью уменьшения значения наибольшей из функций-индикаторов и обхода манипулятором тех его конфигураций, в которых происходит приближение первых шести степеней подвижности к своим ограничениям, манипулятора - к его особым положениям, а его рабочего инструмента - к границе рабочей зоны манипулятора, при этом формирование входных сигналов для следящих приводов всех первых шести степеней подвижности манипулятора посредством программного устройства осуществляют с возможностью учета текущих значений координат трех последних степеней подвижности манипулятора и сохраняемых в памяти программного устройства трехмерных эталонных моделей объектов манипулирования, расположенных в области видимости системы технического зрения, а программное устройство и вспомогательную систему управления выполняют с возможностью экстренной остановки манипулятора посредством фиксации входных сигналов для всех девяти следящих приводов всех его степеней подвижности при превышении порогового значения хотя бы одной из непрерывно рассчитываемых функций-индикаторов, сигнализирующего о недопустимом приближении хотя бы одной из первых шести степеней подвижности к их ограничениям, манипулятора - к его особым положениям, а его рабочего инструмента - к границе рабочей зоны.
Сопоставленный анализ признаков заявляемого способа с признаками аналога и прототипа свидетельствует о соответствии этого способа критерию "новизна".
При этом отличительные признаки формулы изобретения решают следующие функциональные задачи.
Признак, указывающий, что «основание манипулятора выполняют с возможностью его дополнительного перемещения с помощью следящего привода в восьмой линейной степени подвижности в горизонтальной плоскости, ось которой перпендикулярна оси седьмой степени подвижности, вертикальное звено манипулятора выполняют с возможностью изменения его длины с помощью следящего привода в девятой телескопической степени подвижности, ось которой совпадает с осью вертикального звена манипулятора и проходит через его основание», позволяет с учетом уже имеющегося движения в избыточной седьмой степени подвижности дополнительно перемещать весь манипулятор уже во всем трехмерном пространстве, в котором в процессе выполнения манипуляционных операций поддерживается непрерывное плавное движение его РИ с заданной ориентацией в расширенной рабочей зоне без появления нежелательных реверсов и особых положений многозвенника в его шести первых степенях подвижности.
Признак, указывающий, что «вспомогательную систему управления выполняют с возможностью задания в начале смещения основания манипулятора в исходное положение постоянных входных сигналов для следящих приводов седьмой, восьмой и девятой степеней подвижности с учетом информации о текущих пространственных координатах исходного места обработки рабочим инструментом объектов в абсолютной системе координат, которая поступает на вход вспомогательной системы управления с выхода системы технического зрения, информации о форме возможной рабочей зоны манипулятора, которая хранится в памяти вспомогательной системы управления, а также информации о текущих значениях седьмой, восьмой и девятой степеней подвижности, обеспечивающих нахождение исходного места обработки в рабочей зоне манипулятора, программное устройство выполняют с возможностью задания в начале работы манипулятора постоянных входных сигналов для следящих приводов первых шести степеней его подвижности, исключающих столкновения манипулятора и его инструмента с объектами», обеспечивает возможность безаварийного перемещения всего манипулятора в такое исходное положение, при котором начальное (первое) место обработки заданных объектов обязательно будет находиться в рабочей зоне манипулятора.
Признак, указывающий, что «программное устройство и вспомогательную систему управления выполняют с возможностью вычисления значений специальных функций-индикаторов, позволяющих с учетом входных сигналов для следящих приводов первых шести степеней подвижности манипулятора оценить близость этих шести степеней подвижности манипулятора к их ограничениям, близость его конфигурации - к особым положениям, характеризуемым неоднозначностью в решении его обратной задачи кинематики, а также близость рабочего инструмента - к границам рабочей зоны манипулятора», обеспечивает возможность числовой оценки близости конфигурации манипулятора, определяемой первыми шестью степенями подвижности, ко всем критическим положениям, в которых потребуется отрабатывать нежелательные реверсы в отдельных степенях подвижности или экстренно останавливать выполнение манипуляционных операций.
Признак, указывающий, что «программное устройство выполняют с возможностью определения той конфигурации манипулятора из нескольких допустимых, которая исключает в начале работы нахождение первых его шести степеней подвижности в ограничениях, а его конфигурацию - в особых положениях на основе вычисляемых значений специальных функций-индикаторов с учетом исходных пространственных координат и ориентации рабочего инструмента манипулятора в абсолютной системе координат в начале обработки объектов, а также с учетом текущих значений координат его седьмой, восьмой и девятой степеней подвижности и его геометрических параметров, причем при отсутствии допустимой исходной конфигурации манипулятора осуществляют перемещение всего манипулятора с учетом вычисленных значений специальных функций-индикаторов в новое положение, обеспечивающее возможность выбора допустимой исходной конфигурации, посредством совместного или раздельного изменения седьмой, восьмой и девятой степеней подвижности», позволяет выбрать одну (из нескольких возможных) исходную конфигурацию манипулятора, которая исключит, по крайней мере, на начальном этапе его движения в первых шести степенях подвижности нежелательные реверсы, обусловленные входом одной или сразу нескольких степеней подвижности в ограничения, или появление у самого манипулятора особых положений.
Признак, указывающий, что «в начале работы переход манипулятора в исходную допустимую конфигурацию осуществляют посредством задания постоянных входных сигналов для всех девяти следящих приводов всех его степеней подвижности на выходах программного устройства и вспомогательной системы управления в течение времени, необходимого для завершения переходных процессов во всех следящих электроприводах», обеспечивает успешное перемещение манипулятора в выбранную наиболее благоприятную исходную конфигурацию в начале его работы.
Признак, указывающий, что «вспомогательную систему управления выполняют с возможностью задания дополнительного перемещения всего манипулятора посредством седьмой, восьмой и девятой степеней подвижности в абсолютной системе координат при превышении порогового значения хотя бы одной из непрерывно рассчитываемых функций-индикаторов, это дополнительное перемещение определяется с учетом текущих значений входных сигналов для следящих приводов первых шести степеней подвижности с возможностью уменьшения значения наибольшей из функций-индикаторов и обхода манипулятором тех его конфигураций, в которых происходит приближение первых шести степеней подвижности к своим ограничениям, манипулятора - к его особым положениям, а его рабочего инструмента - к границе рабочей зоны манипулятора», обеспечивает формирование входных сигналов для следящих электроприводов избыточных седьмой, восьмой и девятой степеней подвижности, при отработке которых первые шесть степеней подвижности не приближаются к своим ограничениям, манипулятор - к особым положениям, а его РИ - к границе рабочей зоны. В результате этого исключаются появление нежелательных реверсов во всех шести степенях подвижности манипулятора во время его работы, и поддерживается непрерывность выполнения манипуляционных операций без возникновения аварийных ситуаций.
Признак, указывающий, что «формирование входных сигналов для следящих приводов всех первых шести степеней подвижности манипулятора посредством программного устройства осуществляют с возможностью учета текущих значений координат трех последних степеней подвижности манипулятора и сохраняемых в памяти программного устройства трехмерных эталонных моделей объектов манипулирования, расположенных в области видимости системы технического зрения», показывает, что программное устройство в процессе формирования входных сигналов для следящих электроприводов первых шести степеней подвижности манипулятора учитывает текущее положение его основания в абсолютной системе координат и значение длины первого вертикального звена, эталонные трехмерные модели объектов манипулирования, а также вид выполняемых операций.
Признак, указывающий, что «программное устройство и вспомогательную систему управления выполняют с возможностью экстренной остановки манипулятора посредством фиксации входных сигналов для всех девяти следящих приводов всех его степеней подвижности при превышении порогового значения хотя бы одной из непрерывно рассчитываемых функций-индикаторов, сигнализирующего о недопустимом приближении хотя бы одной из первых шести степеней подвижности к их ограничениям, манипулятора - к его особым положениям, а его рабочего инструмента - к границе рабочей зоны», позволяет экстренно остановить выполнение манипуляционных операций при критически близком подходе манипулятора к его нежелательным конфигурациям, не допуская возникновения аварийных ситуаций и поломок оборудования.
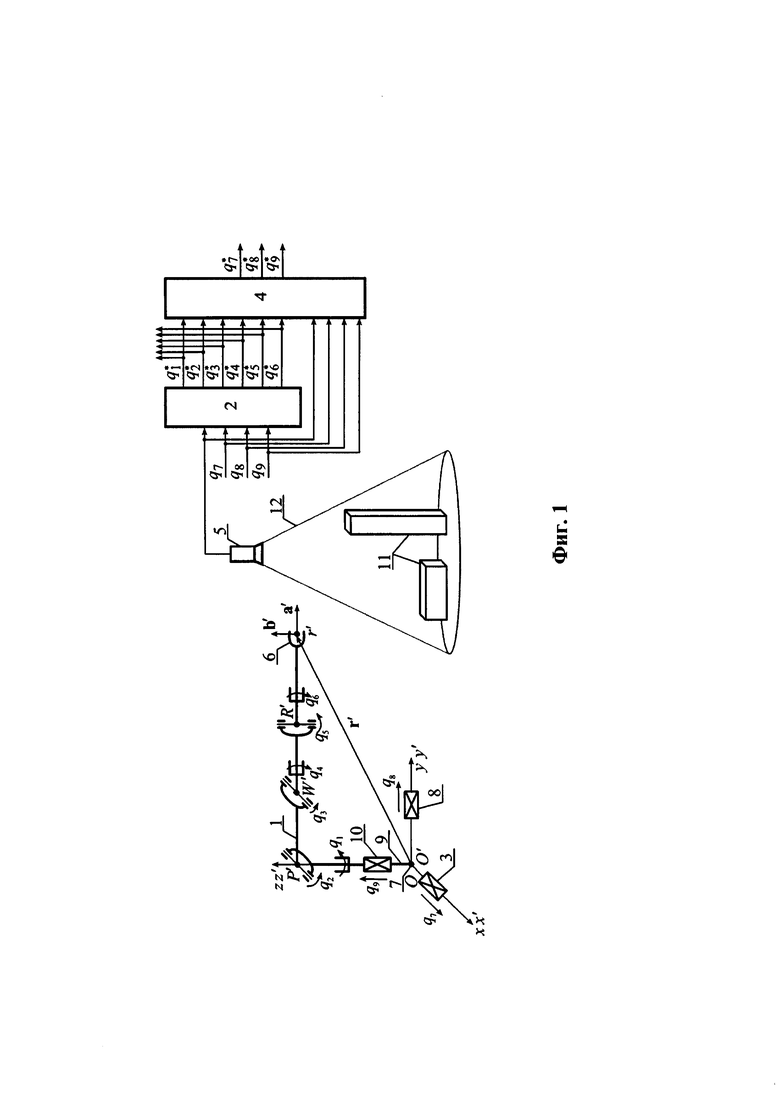
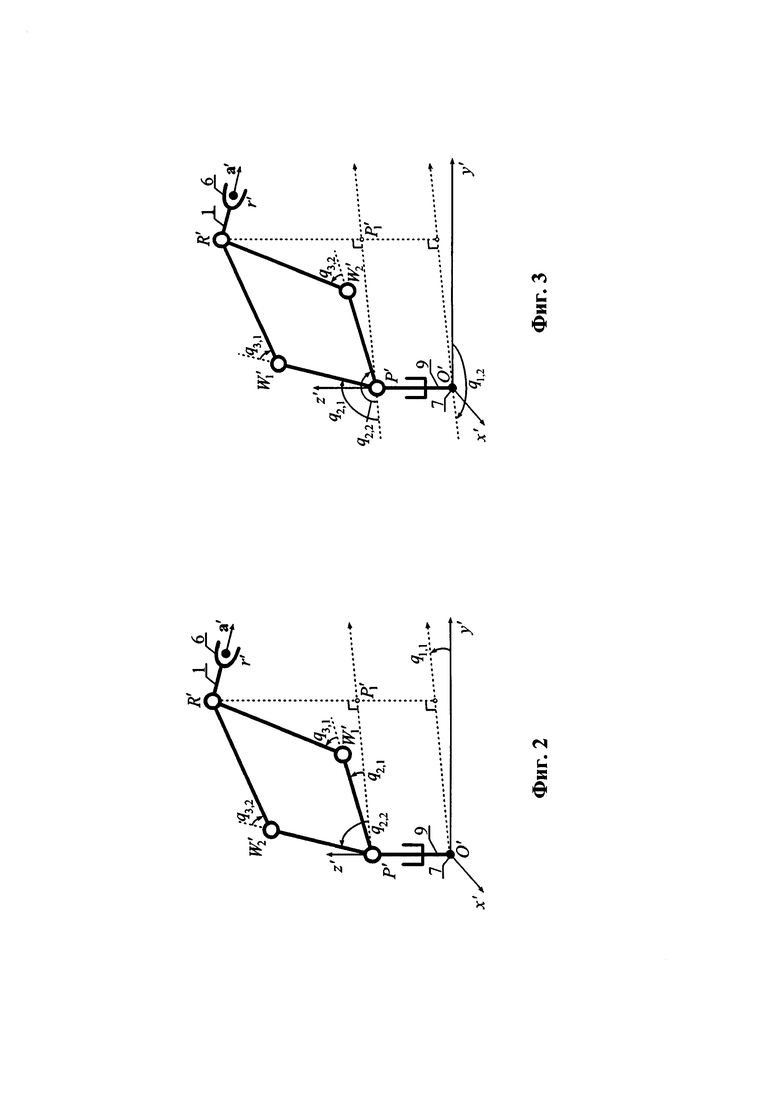
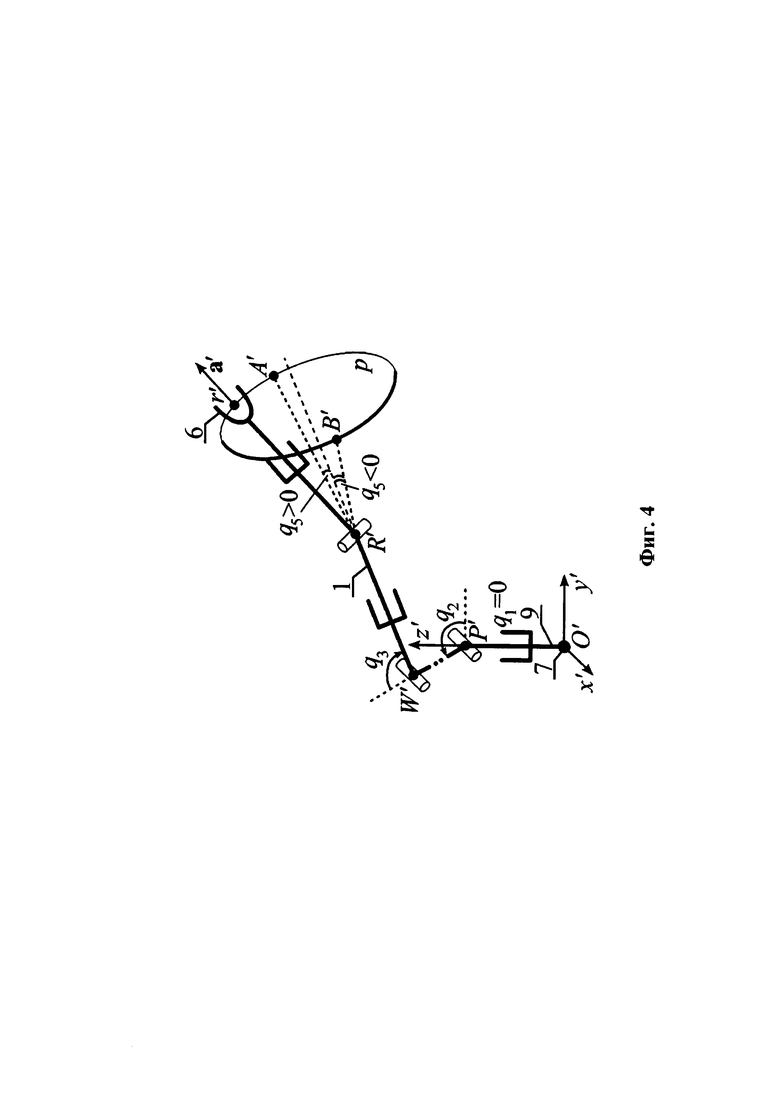
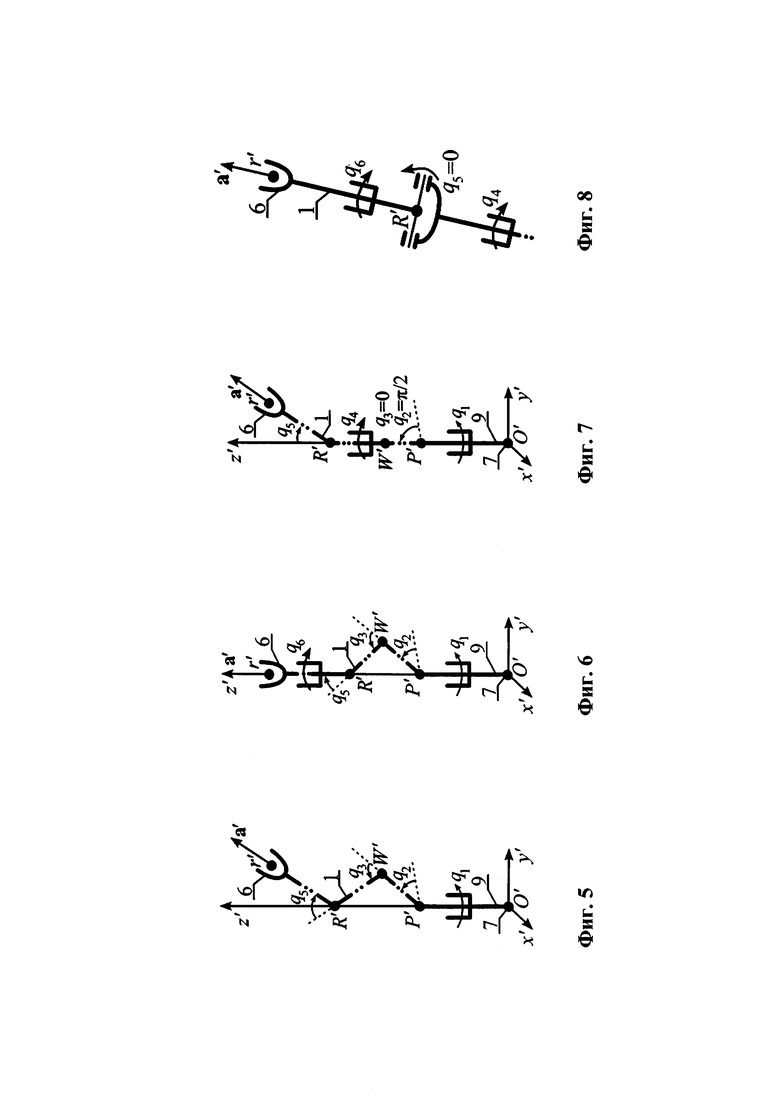
Сущность заявляемого изобретения иллюстрируется чертежами, где на Фиг. 1 схематически показан ММ, установленный на подвижное основание и оснащенный телескопическим механизмом изменения длины его первого вертикального звена, который выполняет манипуляционные операции с произвольно расположенными в пространстве объектами, на Фиг. 2-4 - различные возможные конфигурации ММ, а на Фиг. 5-8 - четыре особых положения ММ.
На Фиг. 1-8 показаны: 1 - ММ, имеющий шесть поворотных (первые три переносные и вторые три ориентирующие) степеней подвижности с кинематической схемой типа PUMA; 2 - программное устройство (ПУ), формирующее программные сигналы  для соответствующих следящих приводов ММ 1; 3 - избыточная седьмая степень подвижности ММ 1 с дополнительным следящим приводом; 4 - вспомогательная система управления (ВСУ); 5 - система технического зрения (СТЗ); 6 - РИ ММ 1; 7 - основание ММ 1; 8 - избыточная линейная восьмая степень подвижности ММ 1 с дополнительным следящим приводом, обеспечивающая перемещение основания 7 в горизонтальной плоскости по оси, перпендикулярной оси седьмой степени 3 подвижности; 9 - вертикальное звено ММ 1, длина которого изменяется с помощью следящего привода девятой избыточной телескопической степени подвижности 10, ось которой совпадает с осью вертикального звена 9 и проходит через основание 7 манипулятора 1; 11 - объекты манипулирования, расположенные в области 12 видимости СТЗ 5.
для соответствующих следящих приводов ММ 1; 3 - избыточная седьмая степень подвижности ММ 1 с дополнительным следящим приводом; 4 - вспомогательная система управления (ВСУ); 5 - система технического зрения (СТЗ); 6 - РИ ММ 1; 7 - основание ММ 1; 8 - избыточная линейная восьмая степень подвижности ММ 1 с дополнительным следящим приводом, обеспечивающая перемещение основания 7 в горизонтальной плоскости по оси, перпендикулярной оси седьмой степени 3 подвижности; 9 - вертикальное звено ММ 1, длина которого изменяется с помощью следящего привода девятой избыточной телескопической степени подвижности 10, ось которой совпадает с осью вертикального звена 9 и проходит через основание 7 манипулятора 1; 11 - объекты манипулирования, расположенные в области 12 видимости СТЗ 5.
Кроме того, на Фиг. 1-8 введены следующие обозначения:  - обобщенная координата i-й степени подвижности ММ 1;
- обобщенная координата i-й степени подвижности ММ 1;  - входные программные сигналы, формируемые на выходе ВСУ 4, для соответствующих следящих приводов трех избыточных степеней 3, 8 и 10 подвижности, обеспечивающих перемещение основания 7 ММ 1 вдоль горизонтальных осей абсолютной (неподвижной) системы координат (СК) Oxyz и изменение длины вертикального звена 9 манипулятора 1, соответственно; O'x'y'z' - связанная с подвижным основанием 7 ММ 1 СК, начало которой расположено в точке О';
- входные программные сигналы, формируемые на выходе ВСУ 4, для соответствующих следящих приводов трех избыточных степеней 3, 8 и 10 подвижности, обеспечивающих перемещение основания 7 ММ 1 вдоль горизонтальных осей абсолютной (неподвижной) системы координат (СК) Oxyz и изменение длины вертикального звена 9 манипулятора 1, соответственно; O'x'y'z' - связанная с подвижным основанием 7 ММ 1 СК, начало которой расположено в точке О';  - измеряемые величины смещения СК O'x'y'z' вдоль горизонтальных осей абсолютной СК Oxyz и изменения длины вертикального звена 9, соответственно;
- измеряемые величины смещения СК O'x'y'z' вдоль горизонтальных осей абсолютной СК Oxyz и изменения длины вертикального звена 9, соответственно;  и
и  - единичные векторы, определяющие ориентацию РИ 6 в СК O'x'y'z';
- единичные векторы, определяющие ориентацию РИ 6 в СК O'x'y'z';  - вектор положения характерной точки рабочего инструмента (ТРИ) r' ММ 1 в СК O'x'y'z'; Ρ', W',R' -характерные точки осей второго, третьего и пятого шарниров ММ 1, соответственно, координаты которых определены в СК O'x'y'z'; Р1' - проекция точки R' на горизонтальную плоскость, проходящую через точку Ρ', в СК O'x'y'z'; q1,1 и q1,2 - различные возможные углы q1 отличающиеся на угол π; q2,1 q3,1 и q2,2, q3,2 - различные возможные пары углов q2 и q3 при различных положениях точки W' (см. точки
- вектор положения характерной точки рабочего инструмента (ТРИ) r' ММ 1 в СК O'x'y'z'; Ρ', W',R' -характерные точки осей второго, третьего и пятого шарниров ММ 1, соответственно, координаты которых определены в СК O'x'y'z'; Р1' - проекция точки R' на горизонтальную плоскость, проходящую через точку Ρ', в СК O'x'y'z'; q1,1 и q1,2 - различные возможные углы q1 отличающиеся на угол π; q2,1 q3,1 и q2,2, q3,2 - различные возможные пары углов q2 и q3 при различных положениях точки W' (см. точки  и
и  на Фиг. 2 и 3); А' и В' - точки, совпадающие с ТРИr' при q4=0 и противоположных знаках q5 ≠ 0, определенные в СК O'x'y'z'; p - окружность, описывающая все возможные положения точки r' при фиксированных координатах q1-q3, q5 ≠ 0, q6 и изменении q4.
на Фиг. 2 и 3); А' и В' - точки, совпадающие с ТРИr' при q4=0 и противоположных знаках q5 ≠ 0, определенные в СК O'x'y'z'; p - окружность, описывающая все возможные положения точки r' при фиксированных координатах q1-q3, q5 ≠ 0, q6 и изменении q4.
СК Oxyz и O'x'y'z' (Фиг. 1) совпадают, если q7=q8=0, иначе их оси всегда остаются параллельными. При этом ось Oz всегда направлена вертикально вверх, а ось Оу дополняет оси Ох и Oz до правой тройки СК.
Заявленный способ реализуется следующим образом.
В области 12 видимости СТЗ 5 (Фиг. 1) располагаются один или несколько объектов 11 работ. С помощью СТЗ 5 выполняется их сканирование. Координаты мест обработки объектов 11, определенные в абсолютной СК Oxyz, поступают с выхода СТЗ 5 на вход ПУ 2, где сохраняются. Также с выхода СТЗ 5 на вход ВСУ 4 поступают координаты исходного места обработки. Если это исходное место расположено вне рабочей зоны ММ 1 при текущих значениях его седьмой 3, восьмой 8 и девятой 10 степеней подвижности  то выполняется предварительное изменение этих значений (выбор новых величин обобщенных координат в седьмой 3, восьмой 8 и девятой 10 степенях подвижности). Всех сразу или только некоторых из них. Для этого во ВСУ 4 с учетом пространственных координат первого места обработки первого объекта в абсолютной СК, а также информации о заранее известной форме рабочей зоны ММ 1 (с учетом его конструктивных особенностей) и о текущих значениях
то выполняется предварительное изменение этих значений (выбор новых величин обобщенных координат в седьмой 3, восьмой 8 и девятой 10 степенях подвижности). Всех сразу или только некоторых из них. Для этого во ВСУ 4 с учетом пространственных координат первого места обработки первого объекта в абсолютной СК, а также информации о заранее известной форме рабочей зоны ММ 1 (с учетом его конструктивных особенностей) и о текущих значениях  рассчитываются новые значения этих qi при которых первое место обработки первого объекта будет находиться на одной высоте с точкой Р' и на расстоянии по горизонтали в половину суммы длин всех кроме вертикального 9 звеньев ММ 1, то есть гарантированно внутри рабочей зоны ММ 1. После этого на выходе ВСУ 4 формируются постоянные программные сигналы
рассчитываются новые значения этих qi при которых первое место обработки первого объекта будет находиться на одной высоте с точкой Р' и на расстоянии по горизонтали в половину суммы длин всех кроме вертикального 9 звеньев ММ 1, то есть гарантированно внутри рабочей зоны ММ 1. После этого на выходе ВСУ 4 формируются постоянные программные сигналы  которые должны быть отработаны следящими приводами трех степеней 3, 8 и 10 подвижности, обеспечивающих перемещение всего ММ 1 вдоль осей абсолютной СК Oxyz в указанное новое положение. Для исключения столкновения ММ 1 с объектами 11 во время этого перемещения конфигурация ММ 1 задается такой, при которой его звенья, корме вертикального, занимают положение, близкое к вертикальному. Это положение выбирается в ПУ 2 таким, чтобы ММ 1 все же не входил в свои особые положения. Для этого на выходе ПУ 2 формируются соответствующие этому положению постоянные программные сигналы
которые должны быть отработаны следящими приводами трех степеней 3, 8 и 10 подвижности, обеспечивающих перемещение всего ММ 1 вдоль осей абсолютной СК Oxyz в указанное новое положение. Для исключения столкновения ММ 1 с объектами 11 во время этого перемещения конфигурация ММ 1 задается такой, при которой его звенья, корме вертикального, занимают положение, близкое к вертикальному. Это положение выбирается в ПУ 2 таким, чтобы ММ 1 все же не входил в свои особые положения. Для этого на выходе ПУ 2 формируются соответствующие этому положению постоянные программные сигналы  отрабатываемые соответствующими следящих приводами первых шести степеней подвижности. В результате выполнения этих предварительных перемещений ММ 1 находится вблизи первого места обработки первого объекта с близкими к вертикальному расположению всех его звеньев.
отрабатываемые соответствующими следящих приводами первых шести степеней подвижности. В результате выполнения этих предварительных перемещений ММ 1 находится вблизи первого места обработки первого объекта с близкими к вертикальному расположению всех его звеньев.
После этого с учетом полученных с помощью СТЗ 5 и сохраненных в памяти ПУ 2 отсканированных в абсолютной СК Oxyz мест обработки всех объектов И определяют требуемые исходное положение ТРИr' и исходную пространственную ориентацию векторов а' и b' уже в связанной CKO'x'y'z'. Технология определения координат ТРИ r' и единичных векторов а' и b' в связанной СК в исходном месте обработки первого объекта с учетом уже полученных в абсолютной СК и сохраняемых в памяти ПУ 2 мест обработки всех объектов 11, размеров инструмента и предстоящих технологических операций в настоящее время хорошо известна и описана во многих публикациях.
Затем ММ 1 перемещает РИ 6 в связанной СК в исходное положение с вычисленными координатами ТРИ r' и с задаваемой векторами а' и b' ориентацией. При этом РИ 6 может быть перемещен в указанное положение при восьми различных конфигурациях ММ 1 (Фу. К., Гонсалес Р., Ли К. Робототехника, М.: Мир, 1989, С. 77-93), которые обеспечиваются различными наборами обобщенных координат  (см. различные комбинации углов q1 (q1,1 и q1,2), q2 (q2,1 и q2,2) и q3 (q3,1 и q3,2) на Фиг. 2 и 3, а также углов q5 на Фиг. 4). Поэтому необходимо выбрать такую исходную конфигурацию, при которой в первом месте обработки первого из объектов 11 все степени подвижности ММ 1 были максимально удалены от своих предельных значений, а сам ММ 1 - от своих особых положений (Фиг. 5-8). Это позволит на начальном этапе выполнения манипуляционных операций исключить появление нежелательных реверсов в первых шести степенях подвижности ММ1. Для этого в ПУ 2 для всех восьми возможных начальных конфигураций ММ 1 с использованием известных аналитических выражений (Крейг Д. Дж. Введение в робототехнику: механика и управление, М.-Ижевск.: Институт компьютерных исследований, 2013, С. 155-160) рассчитываются значения программных сигналов
(см. различные комбинации углов q1 (q1,1 и q1,2), q2 (q2,1 и q2,2) и q3 (q3,1 и q3,2) на Фиг. 2 и 3, а также углов q5 на Фиг. 4). Поэтому необходимо выбрать такую исходную конфигурацию, при которой в первом месте обработки первого из объектов 11 все степени подвижности ММ 1 были максимально удалены от своих предельных значений, а сам ММ 1 - от своих особых положений (Фиг. 5-8). Это позволит на начальном этапе выполнения манипуляционных операций исключить появление нежелательных реверсов в первых шести степенях подвижности ММ1. Для этого в ПУ 2 для всех восьми возможных начальных конфигураций ММ 1 с использованием известных аналитических выражений (Крейг Д. Дж. Введение в робототехнику: механика и управление, М.-Ижевск.: Институт компьютерных исследований, 2013, С. 155-160) рассчитываются значения программных сигналов  Для восьми наборов значении й
Для восьми наборов значении й  и проекций характерной точки R' оси пятого шарнира на плоскость O'х'у', равных
и проекций характерной точки R' оси пятого шарнира на плоскость O'х'у', равных  и
и  в ПУ 2 рассчитывают значения специальных функций-индикаторов, каждая из которых позволяет численно оценить степень приближения конфигурации ММ 1 к одному из нежелательных положений. Значения этих функций-индикаторов могут изменяться от 0 (наиболее благоприятное положение ММ 1) до 1 (его критическое положение). С использованием этих индикаторов определяют исходную конфигурацию ММ 1.
в ПУ 2 рассчитывают значения специальных функций-индикаторов, каждая из которых позволяет численно оценить степень приближения конфигурации ММ 1 к одному из нежелательных положений. Значения этих функций-индикаторов могут изменяться от 0 (наиболее благоприятное положение ММ 1) до 1 (его критическое положение). С использованием этих индикаторов определяют исходную конфигурацию ММ 1.
Значения первых шести индикаторов сигнализируют о приближении первых шести степеней подвижности к их ограничениям и рассчитываются с помощью выражений

где qi min и qi max - соответственно, минимальное и максимальное значения 
Значение седьмого индикатора

указывает на приближение ММ 1 к первым трем особым положениям (Фиг. 5-7), в которых точка R' располагается на оси Ο'z'.
Значение восьмого индикатора

сигнализирует о приближении ММ 1 к четвертому особому положению (Фиг. 8), в котором q5=0, а значение девятого индикатора

сигнализирует о приближении РИ 6 к границе рабочей зоны ММ1, где q3=0 (Фиг. 1 и 7).
При этом выбирают ту исходную конфигурацию ММ 1 (Нильсон Н. Искусственный интеллект. Методы поиска решений, М.: Мир, 1973, С. 132-134), при которой значение наибольшего из девяти введенных индикаторов (1-4) при начальных координатах ТРИ r', а' и b' оказывается минимальным. Если для нескольких возможных конфигураций ММ 1 значения наибольших из девяти индикаторов (1-4) оказываются одинаковыми и меньшими относительно остальных, то в качестве исходной выбирается любая из них. Если же во всех исходных конфигурациях значение хотя бы одного из девяти индикаторов (1-4) превышает заранее сохраненное в памяти ПУ 2 и ВСУ 4 положительное критическое пороговое значение Jcr ≤ 1, то есть ММ 1 во всех возможных начальных конфигурациях недопустимо близок к нежелательным положениям, то координаты первой точки r' опять должны быть изменены за счет дополнительного перемещения всего ММ 1. Для этого на выходе ВСУ 4 формируются новые постоянные программные сигналы  отрабатываемые следящими приводами трех избыточных степеней 3, 8 и 10 подвижности и обеспечивающие перемещение всего ММ 1 вдоль осей абсолютной СК Oxyz в новое положение, в котором значения всех девяти индикаторов (1-4) хотя бы для одной из его возможных конфигураций не будут превышать Jcr. В дальнейшем при управлении ММ 1 расчет новых значений
отрабатываемые следящими приводами трех избыточных степеней 3, 8 и 10 подвижности и обеспечивающие перемещение всего ММ 1 вдоль осей абсолютной СК Oxyz в новое положение, в котором значения всех девяти индикаторов (1-4) хотя бы для одной из его возможных конфигураций не будут превышать Jcr. В дальнейшем при управлении ММ 1 расчет новых значений  в ПУ 2 выполняется с учетом его выбранной исходной конфигурации.
в ПУ 2 выполняется с учетом его выбранной исходной конфигурации.
После определения исходной конфигурации ММ 1 перемещает РИ 6 в исходное положение, для чего с учетом начальных координат ТРИ r' и векторов а' и b' на выходе ПУ 2 формируют постоянные программные сигналы  отрабатываемые соответствующими следящими приводами ММ 1.
отрабатываемые соответствующими следящими приводами ММ 1.
Эти сигналы остаются постоянными в течение фиксированного промежутка времени, достаточного для завершения переходных процессов во всех электроприводах первых шести степеней подвижности ММ 1.
В процессе выполнения конкретной технологической операции (работы) из исходного положения ММ1 на выходе ПУ 2 в реальном масштабе времени начинают формироваться новые программные значения  рассчитанные с учетом программных значений соответствующих векторов r', а' и b', которые зависят от измеряемых значений
рассчитанные с учетом программных значений соответствующих векторов r', а' и b', которые зависят от измеряемых значений  и от сохраненных в памяти ПУ 2 трехмерных эталонных моделей объектов 11. Одновременно во ВСУ 4, на вход которой поступают текущие значения
и от сохраненных в памяти ПУ 2 трехмерных эталонных моделей объектов 11. Одновременно во ВСУ 4, на вход которой поступают текущие значения  с учетом непрерывно рассчитываемых значений девяти индикаторов (1-4) отслеживается приближение ММ 1 к своим нежелательным конфигурациям. Если при очередном изменении значений
с учетом непрерывно рассчитываемых значений девяти индикаторов (1-4) отслеживается приближение ММ 1 к своим нежелательным конфигурациям. Если при очередном изменении значений  не происходит приближения ММ 1 к какому-либо из указанных ранее нежелательных положений, то есть значение наибольшего из девяти индикаторов (1-4) не превышает Jth (Jth ∈ [0, Jcr] - заранее сохраненное в памяти ВСУ 4 значение), то координаты основания 7 ММ 1 и длину вертикального звена 9 сохраняют неизменной, т.е. сигналы
не происходит приближения ММ 1 к какому-либо из указанных ранее нежелательных положений, то есть значение наибольшего из девяти индикаторов (1-4) не превышает Jth (Jth ∈ [0, Jcr] - заранее сохраненное в памяти ВСУ 4 значение), то координаты основания 7 ММ 1 и длину вертикального звена 9 сохраняют неизменной, т.е. сигналы  остаются постоянными. Иначе начинается движение в степенях 3, 8 и 10 подвижности, которое изменяет величину r' так, чтобы уменьшить значения наибольшего из девяти индикаторов (1-4).
остаются постоянными. Иначе начинается движение в степенях 3, 8 и 10 подвижности, которое изменяет величину r' так, чтобы уменьшить значения наибольшего из девяти индикаторов (1-4).
Для определения направления этого движения учитывают, что значения индикаторов (1-4) зависят от значений  которые рассчитывают с учетом значений вектора r', в свою очередь зависящего от текущих значений координат
которые рассчитывают с учетом значений вектора r', в свою очередь зависящего от текущих значений координат  Направление очередного смещения всего ММ 1 в абсолютной СК определяют во ВСУ 4 как противоположное градиенту функции наибольшего из индикаторов (1-4) по переменным
Направление очередного смещения всего ММ 1 в абсолютной СК определяют во ВСУ 4 как противоположное градиенту функции наибольшего из индикаторов (1-4) по переменным  В результате на выходе ВСУ 4 формируют новые сигналы
В результате на выходе ВСУ 4 формируют новые сигналы  которые меняются непрерывно или дискретно в зависимости от выбранного алгоритма управления и обеспечивают смещение основания 7 ММ1 в горизонтальной плоскости и изменение длины вертикального звена 9 с помощью трех избыточных степеней 3, 8 и 10 подвижности для реализации выбранного направления смещения. В результате опять происходит удаление первых шести степеней подвижности ММ 1 от ограничений, его конфигурации от особых положений (Фиг. 5-8), а РИ 6 - от границы рабочей зоны при текущих значениях
которые меняются непрерывно или дискретно в зависимости от выбранного алгоритма управления и обеспечивают смещение основания 7 ММ1 в горизонтальной плоскости и изменение длины вертикального звена 9 с помощью трех избыточных степеней 3, 8 и 10 подвижности для реализации выбранного направления смещения. В результате опять происходит удаление первых шести степеней подвижности ММ 1 от ограничений, его конфигурации от особых положений (Фиг. 5-8), а РИ 6 - от границы рабочей зоны при текущих значениях 
Если, несмотря на перемещение основания 7 и изменение длины первого звена 9 с помощью трех избыточных степеней 3, 8 и 10 подвижности, ММ 1 недопустимо близко приближается к указанным нежелательным положениям, что отслеживается одновременно в ПУ 2 и во ВСУ 4 при сравнении значений наибольшего из девяти индикаторов (1-4) и Jcr, то работа ММ 1 прекращается во избежание аварийных ситуаций. Для этого фиксируют значения всех программных сигналов  на выходах ПУ 2 и ВСУ 4. Выполнение манипуляционных операций продолжают только после того, как обрабатываемые объекты 11 будут перемещены в новые места в области 12 видимости СТЗ 5. При этом их сканирование выполняют повторно и весь описанный выше процесс повторяют.
на выходах ПУ 2 и ВСУ 4. Выполнение манипуляционных операций продолжают только после того, как обрабатываемые объекты 11 будут перемещены в новые места в области 12 видимости СТЗ 5. При этом их сканирование выполняют повторно и весь описанный выше процесс повторяют.
Указанный способ управления ММ 1 сохраняется в течение всего времени обработки объектов 11. Его техническая реализация не имеет принципиальных затруднений, поскольку в ней используют только известные типовые системы и устройства.
Изобретение относится к робототехнике, в частности, к системам управления многостепенными манипуляторами, имеющими конструктивные ограничения перемещения во всех их степенях подвижности и дополнительные избыточные степени подвижности. Изобретение обеспечивает расширение рабочих зон многостепенного манипулятора, сохранение высокой точности безаварийного выполнения ими всех манипуляционных операций при использовании их автоматических перемещений в трех избыточных линейных степенях подвижности, при введении которых полностью исключаются положения, характеризуемые неоднозначностью в решении обратной задачи кинематики, и нежелательные реверсы во всех их степенях подвижности, связанные с выходом их степеней подвижности на ограничения. 8 ил.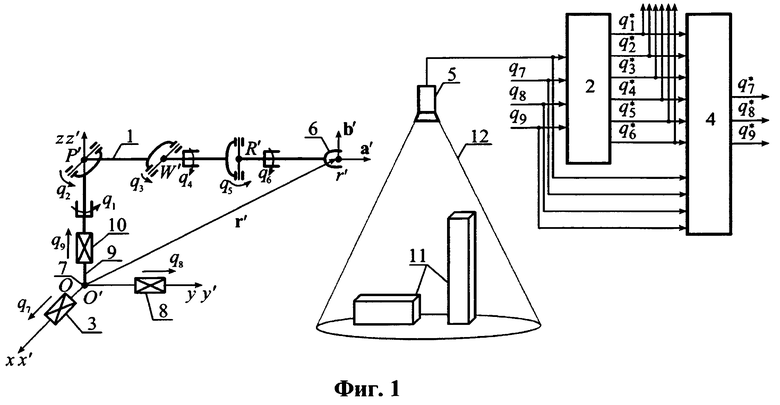
Способ управления многостепенным манипулятором, имеющим шесть степеней подвижности, программное устройство, избыточную седьмую степень подвижности, снабженную дополнительным следящим приводом, вспомогательную систему управления и систему технического зрения, жестко связанную с абсолютной системой координат и с программным устройством, при этом осуществляют формирование с помощью программного устройства входных сигналов для следящих приводов всех его шести степеней подвижности, обеспечивающих перемещение рабочего инструмента манипулятора в абсолютной системе координат и передачу с помощью системы технического зрения в программное устройство информации о пространственных координатах в абсолютной системе координат мест обработки рабочим инструментом манипулятора, при этом дополнительный следящий привод избыточной седьмой степени подвижности выполняют с возможностью обеспечения расширенной рабочей зоны манипулятора и увеличенного его угла сервиса, а вспомогательную систему управления - с возможностью дополнительного перемещения основания манипулятора посредством избыточной седьмой степени подвижности в абсолютной системе координат, отличающийся тем, что основание манипулятора выполняют с возможностью его дополнительного перемещения с помощью следящего привода в восьмой линейной степени подвижности в горизонтальной плоскости, ось которой перпендикулярна оси седьмой степени подвижности, вертикальное звено манипулятора выполняют с возможностью изменения его длины с помощью следящего привода в девятой телескопической степени подвижности, ось которой совпадает с осью вертикального звена манипулятора и проходит через его основание, при этом вспомогательную систему управления выполняют с возможностью задания в начале смещения основания манипулятора в исходное положение постоянных входных сигналов для следящих приводов седьмой, восьмой и девятой степеней подвижности с учетом информации о текущих пространственных координатах исходного места обработки рабочим инструментом объектов в абсолютной системе координат, которая поступает на вход вспомогательной системы управления с выхода системы технического зрения, информации о форме возможной рабочей зоны манипулятора, которая хранится в памяти вспомогательной системы управления, а также информации о текущих значениях седьмой, восьмой и девятой степеней подвижности, обеспечивающих нахождение исходного места обработки в рабочей зоне манипулятора, программное устройство выполняют с возможностью задания в начале работы манипулятора постоянных входных сигналов для следящих приводов первых шести степеней его подвижности, исключающих столкновения манипулятора и его инструмента с объектами, причем программное устройство и вспомогательную систему управления выполняют с возможностью вычисления значений функций-индикаторов, позволяющих с учетом входных сигналов для следящих приводов первых шести степеней подвижности манипулятора оценить близость этих шести степеней подвижности манипулятора к их ограничениям, близость его конфигурации к особым положениям, характеризуемым неоднозначностью в решении его обратной задачи кинематики, а также близость рабочего инструмента к границам рабочей зоны манипулятора, при этом программное устройство выполняют с возможностью определения той конфигурации манипулятора из нескольких допустимых, которая исключает в начале работы нахождение первых его шести степеней подвижности в ограничениях, а его конфигурацию - в упомянутых особых положениях на основе вычисляемых значений функций-индикаторов с учетом исходных пространственных координат и ориентации рабочего инструмента манипулятора в абсолютной системе координат в начале обработки объектов, а также с учетом текущих значений координат его седьмой, восьмой и девятой степеней подвижности и его геометрических параметров, причем при отсутствии допустимой исходной конфигурации манипулятора осуществляют перемещение всего манипулятора с учетом вычисленных значений функций-индикаторов в новое положение, обеспечивающее возможность выбора допустимой исходной конфигурации, посредством совместного или раздельного изменения седьмой, восьмой и девятой степеней подвижности, при этом в начале работы переход манипулятора в исходную допустимую конфигурацию осуществляют посредством задания постоянных входных сигналов для всех девяти следящих приводов всех его степеней подвижности на выходах программного устройства и вспомогательной системы управления в течение времени, необходимого для завершения переходных процессов во всех следящих электроприводах, а вспомогательную систему управления выполняют с возможностью задания дополнительного перемещения всего манипулятора посредством седьмой, восьмой и девятой степеней подвижности в абсолютной системе координат при превышении порогового значения хотя бы одной из непрерывно рассчитываемых функций-индикаторов, это дополнительное перемещение определяется с учетом текущих значений входных сигналов для следящих приводов первых шести степеней подвижности с возможностью уменьшения значения наибольшей из функций-индикаторов и обхода манипулятором тех его конфигураций, в которых происходит приближение первых шести степеней подвижности к своим ограничениям, манипулятора - к его упомянутым особым положениям, а его рабочего инструмента - к границе рабочей зоны манипулятора, при этом формирование входных сигналов для следящих приводов всех первых шести степеней подвижности манипулятора посредством программного устройства осуществляют с возможностью учета текущих значений координат трех последних степеней подвижности манипулятора и сохраняемых в памяти программного устройства трехмерных эталонных моделей объектов манипулирования, расположенных в области видимости системы технического зрения, а программное устройство и вспомогательную систему управления выполняют с возможностью экстренной остановки манипулятора посредством фиксации входных сигналов для всех девяти следящих приводов всех его степеней подвижности при превышении порогового значения хотя бы одной из непрерывно рассчитываемых функций-индикаторов, сигнализирующего о недопустимом приближении хотя бы одной из первых шести степеней подвижности к их ограничениям, манипулятора - к его упомянутым особым положениям, а его рабочего инструмента - к границе рабочей зоны.
| Способ управления манипулятором | 2017 |
|
RU2692360C2 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| US 20110022216 A1, 27.01.2011 | |||
| 0 |
|
SU323278A1 | |

