Изобретение относится к устройствам бесконтактного измерения угла наклона рукоятки джойстика и преобразования его в электрический сигнал с использованием магнитоуправляемого сенсора, предназначено для точного пропорционального управления перемещением исполнительных механизмов в машиностроении и используется в составе электронных систем управления, в частности в составе пультов дистанционного управления, стационарных панелей и блоков управления.
Из предшествующего уровня техники известно устройство направленного ввода, источник информации US 2013147642 A1 (патент US 9946293 B2), 12.12.2011, предназначенное для управления направлением движения физического объекта (например, стрелы крана) или виртуального объекта в графическом пользовательском интерфейсе.
Устройство раскрыто в различных вариантах осуществления, где вариант, наиболее близкий для его упоминания в качестве аналога настоящего изобретения, содержит корпус, удлиненный элемент управления направлением (далее по тексту - рукоятка), один конец которого помещен внутрь корпуса, а второй конец выступает из корпуса и имеет возможность перемещения пользователем, магнит для удерживания рукоятки в одном или нескольких заранее определенных положениях и датчик, прикрепленный к корпусу и используемый для определения изменения положения рукоятки. При этом магнит соединяется с корпусом, а рукоятка включает в себя магнитный элемент, предназначенный для взаимодействия с магнитом и удерживания рукоятки в нейтральном положении покоя. Магнит, соединенный с корпусом, и магнитный элемент в рукоятке могут быть сделаны из любых подходящих материалов, которые притягиваются друг к другу посредством магнитной силы. В первом варианте магнитный элемент в рукоятке может быть сделан из металлического материала, притягиваемого к магниту корпуса, например, это может быть сталь. В другом варианте магнитный элемент в рукоятке может быть магнитом, при этом полюса магнитов разворачиваются таким образом, чтобы они притягивались друг к другу.
Магнит удерживается на месте посредством магнитного взаимодействия с поверхностью внутри корпуса, или он может быть соединен с корпусом с помощью любого подходящего механизма.
Датчик может представлять собой оптический датчик, сконфигурированный для обнаружения изменения положения окаймляющего корпуса, соединенного с рукояткой. В других вариантах конструкции датчик может быть сенсором на эффекте Холла или любым другим подходящим датчиком, который может обнаруживать движение рукоятки.
Магнитная сила между магнитом и магнитным элементом максимальна в нейтральном положении рукоятки. При перемещении пользователем рукоятки, магнитная сила, удерживающая магнитный элемент по отношению к неподвижному магниту, уменьшается по мере того, как пользователь отклоняет рукоятку от нейтрального положения. Когда пользователь отпускает рукоятку, магнитная сила возвращает рукоятку обратно в ее нейтральное положение, тем самым приводя к эффекту "обратной пружины" по сравнению с пружинно-смещаемыми рукоятками.
Величина магнитной силы, создаваемой между магнитом и магнитным элементом, определяется площадью поверхности каждого элемента и материалом, из которого изготовлен каждый элемент.
Недостатком аналога является то, что для первоначального сдвига рукоятки устройства из нейтрального положения покоя, требуется максимальное усилие, что вызовет резкое, скачкообразное управление рукояткой. Это приведет к низкой точности управления оператором рукояткой в положениях близких к нейтральному, что соответствует управлению при малых скоростях.
Следующим недостатком аналога является уменьшение прикладываемого усилия к рукоятке при увеличении угла наклона, описанный как эффект "обратной пружины". В данной конструкции при некоторых максимальных углах наклона рукоятки возможно, что силы трения конструкции, удерживающие рукоятку, будут больше, чем возвратное сопротивление, вызванное магнитной силой, что приведет к невозврату рукоятки в нейтральное положение при отсутствии воздействия на рукоятку оператором. Конструкция на эффекте "обратной пружины" не отвечает требованиям безопасности при управлении физическими объектами, такими как кран, буровая машина и т.д.
Следующим недостатком аналога является наличие дополнительной детали - окаймляющего корпуса, жестко связанного с рукояткой, предназначенного для съема сигнала положения рукоятки оптическим датчиком, что приводит к усложнению конструкции.
Следующим недостатком аналога является то, что при возможном использовании сенсора Холла, результирующее магнитное поле образуется двумя деталями: магнитом в корпусе и магнитным элементом в рукоятке, что приводит к усложнению конструкции.
Следующим недостатком аналога является создание результирующего магнитного поля неподвижным магнитом в корпусе и подвижным магнитным элементом в рукоятке, что приведет к малому диапазону изменения магнитной индукции при наклоне рукоятки в точке измерения сенсором Холла. Малый диапазон изменения магнитной индукции приведет к малому диапазону изменения сигнала на выходе сенсора Холла, что приведет к уменьшению разрешающей способности для пропорционального регулирования рукояткой, а также к большему влиянию изменения температуры окружающей среды на изменение выходного сигнала сенсора Холла, связанного с изменением параметров магнита, магнитного элемента и сенсора Холла в зависимости от температуры.
Следующим недостатком аналога является то, что для получения требуемой силы возврата рукоятки в нейтральное положение при максимальных углах наклона необходимо применение магнита и магнитного элемента с площадью поверхности взаимодействия существенно больше, чем диаметр рукоятки. При наклоне рукоятки осью поворота является точка соприкосновения магнита и магнитного элемента, которая удалена от оси магнита и корпуса. Такая конструкция приводит к увеличению габаритных размеров устройства в крайних положениях рукоятки при максимальном угле наклона от нейтрального положения и нелинейной характеристике выходного сигнала в зависимости от угла наклона рукоятки.
Из предшествующего уровня техники известен магнитный джойстик, источник информации полезная модель RU 171081U1, 07.03.2017, предназначенный для дистанционного управления техническими объектами и курсорами дисплеев, содержащий магнитный шар с закрепленным на одном из его магнитных полюсов рычагом, установленный в немагнитном корпусе с возможностью поворота, и два магнитоуправляемых датчика, закрепленных на немагнитном корпусе, магнитный шар опирается на коническую поверхность фаски отверстия в немагнитном корпусе, в котором соосно с этим отверстием закреплен ферромагнитный стержень, при этом большая часть магнитного шара остается вне корпуса. Магнитный шар выполнен из неодимового сплава, а рычаг - из немагнитного материала. Магнитный джойстик имеет диапазон поворота рычага 160 градусов в любой вертикальной плоскости.
Недостатком настоящего аналога, как и в случае предыдущего технического решения, является отсутствие в конструкции пружинного элемента, из чего также следует, что для первоначального сдвига рукоятки устройства из нейтрального положения покоя, требуется максимальное усилие, что вызовет резкое, скачкообразное управление рукояткой. Это приведет к низкой точности управления оператором рукояткой в положениях близких к нейтральному.
Следующим недостатком аналога в виду отсутствия пружинного элемента, является уменьшаемая величина прикладываемого усилия к рычагу при увеличении угла наклона, после отрыва от нейтрально положения. Таким образом прикладываемое усилие становится минимальным при максимальном угле наклона рычага от нейтрального положения. Такая конструкция не отвечает требованиям безопасности при управлении физическими объектами, такими как кран, буровая машина и т.д.
Следующим недостатком аналога является ненадежность подвижного соединения магнитного шара и немагнитного корпуса, которое обеспечивается исключительно за счет магнитной силы, возникающей между магнитным шаром и ферромагнитным стержнем, закрепленным в корпусе основания соосно магнитному шару. Согласно описанию полезной модели, для удаления магнитного шара с рычагом из немагнитного корпуса достаточно приложить небольшое усилие. Это разъединение может произойти самопроизвольно, что также нарушает требования безопасности.
Следующим недостатком аналога является сложность изготовления джойстика, так как магнитный шар выполнен из неодимового сплава. По причине хрупкости этого материала, процесс производства магнитного шара сам по себе является достаточно трудоемким, но он дополнительно усложняется необходимостью выполнения в нем отверстия для установки рычага.
Следующим недостатком аналога является применение детали из неодимого сплава, в частности магнитного шара, в качестве силового элемента, что может влиять на надежность изделия. В числе испытываемых силовых нагрузок, воздействующих на магнитный шар, наиболее значительной является трение между поверхностями магнитного шара и ферромагнитного стержня в течение всего поворота шара (хода рычага), а также между поверхностями магнитного шара и фаски немагнитного корпуса.
Следующим недостатком аналога является наличие существенных сил трения между поверхностями магнитного шара и фаски немагнитного корпуса, из-за чего рукоятка, при отсутствии на нее воздействия, не сможет установиться в нейтральное положение. Причем, чем выше магнитная сила, устанавливающая рукоятку в нейтральное положение, тем выше сила притяжения деталей между собой, тем выше сила трения.
Следующим недостатком аналога является наличие в магнитной системе датчик Холла-магнитный шар дополнительного элемента - ферромагнитного стержня. Такой дополнительный элемент изменяет (искривляет) линии магнитной индукции, что приведет к нелинейной зависимости характеристики выходного сигнала в зависимости от угла наклона рычага.
Следующим недостатком аналога является поворот магнитного шара относительно датчика Холла на угол, больший 45 градусов относительно вертикали. При угле, большем 45 градусов, характеристика выходного сигнала датчика Холла в зависимости от угла поворота магнитного шара становится нелинейной. При наклоне рычага вдоль оси чувствительности или по диагонали между осями чувствительности на угол больший 45 градусов относительно вертикали, нелинейность характеристики приведет к искажению определения угла наклона рычага вдоль каждой из осей чувствительности.
Следующим недостатком аналога является значительные габаритные и присоединительные размеры джойстика, которые определяются исходя из его конструкции, так как для обеспечения величины магнитной силы, необходимой для удержания магнитного шара в корпусе и его самоустановки совместно с рычагом в исходное положение, требуется достаточный для работоспособности такого изделия диаметр магнитного шара. Прочие элементы расположены в немагнитном корпусе вокруг шара, что также увеличивает габаритные и присоединительные размеры джойстика. Габаритный джойстик не может применяться в составе устройств управления, например, дистанционных пультов, содержащих на своей приборной панели несколько органов управления.
Известен джойстик управления, источник информации US 4500867 A, 13.01.1982, предназначенный для применения в таких областях, как точное ручное курсорное управление для CRT-дисплеев, дистанционное управление промышленными роботами, применения в качестве рычагов управления для телевизионных игровых устройств, и так далее, состоящий из немагнитного статора, в сферической полости которого установлена шарообразная головка, выполненная из двух полусферических деталей из немагнитного материала, со встроенным рычагом. Внутри шарообразной головки закреплен двухполюсный кольцевой постоянный магнит с аксиальной намагниченностью. На немагнитном статоре в одной плоскости установлены два магнитоуправляемых элемента. Для фиксации положения шарообразной головки в нижней части статора установлен пружинный элемент в виде корончатой шайбы.
Недостатками технического решения аналога являются сложность конструкции, обусловленная наличием сферических деталей, увеличенные габаритные размеры, а также тот факт, что применение кольцевого постоянного магнита, ось которого совпадает с продольной осью рукоятки, приведет к нелинейной характеристике выходного сигнала датчика Холла в зависимости от угла поворота рычага, а соответственно и к искажению определения угла наклона рычага вдоль каждой из осей чувствительности.
Наиболее близким аналогом настоящего изобретения является поворотный переключатель - джойстик, источник информации ЕР 3174081, 31.05.2017, предназначенный для применения в качестве модуля, обеспечивающего управление. Основание переключателя содержит основной корпус, внутри центрального выступа которого вертикально размещена печатная плата. На основном корпусе, с лицевой и тыльной стороны печатной платы, установлены с возможностью вращения первый и второй валы сложной геометрической формы, каждый из которых оснащен по меньшей мере одним пружинным элементом. Первый вал устанавливается на основной корпус посредством подшипника. Каждый вал имеет опорный элемент, выполненный в виде выступа. На основной корпус устанавливается верхний корпус, имеющий боковые вырезы для выступающей части валов, и таким образом, опорные элементы первого и второго валов выступают за пределы основания переключателя и обеспечивают соединение с регулирующим колесом, предназначенным для выполнения ограниченного кругового вращения относительно основания, передавая вращение связанным с ним первому и второму валам, таким образом, первый и второй валы совместно выполняют функцию оси вращения регулирующего колеса. Опорные концы пружин опираются на выступы в первом и втором валах и выступы в верхнем корпусе, тем самым обеспечивая возврат валов в нейтральное положение. Внутри каждого вала установлен двухполюсный постоянный магнит, имеющий форму параллелепипеда. Постоянные магниты, расположенные на оси вращения регулирующего колеса, вращаясь вокруг оси в соединении с валами, воздействуют на магнитоуправляемый сенсор, смонтированный на печатной плате, расположенной между валами, таким образом, чтобы сенсор находился на оси вращения регулирующего колеса и мог считывать поворот полюсов постоянных магнитов. В верхней части регулирующее колесо продолжается полым цилиндрическим выступом, в котором расположена пружина, поджимаемая шариком. При наклоне регулирующего колеса подпружиненный шарик перемещается вдоль поверхности верхнего корпуса, на которой выполнены одно или несколько полусферических углублений, позволяющих осуществлять центрирование переключателя в нейтральном положении, а также выполнить вариант изделия с возможностью шагового переключения. На регулирующем колесе закреплен удерживающий элемент. В сборе регулирующее колесо и удерживающий элемент образуют рукоятку, позволяющую оператору пальцами рук обхватывать ее и управлять переключателем.
Недостатком ближайшего аналога является наличие промежуточной детали между рукояткой и постоянным магнитом, и так как крутящий момент передается постоянному магниту от вала, соединенного с поворотной рукояткой, то возникает вероятность образования люфта в соединении между валом и поворотной рукояткой, в том числе за счет износа в процессе эксплуатации, что влияет на точность регулирования выходного сигнала.
Следующим недостатком ближайшего аналога является сложность конструкции, обусловленная значительным количеством деталей, в том числе наличием валов сложной геометрической формы, наличием по меньшей мере двух пружин, наличием по меньшей мере двух магнитных элементов, выполнение рукоятки по меньшей мере из двух деталей, наличие шарика с пружиной для фиксации рукоятки в нейтральном положении. Установка по меньшей мере двух пружин в конструкции способствует уменьшению сил трения при повороте рукоятки и объясняется необходимостью защиты регулирующего колеса от заклинивания, которое может возникнуть в связи с разделением узла вращения на два вала, пространство между которыми предназначено для установки печатной платы с целью размещения сенсора на оси вращения регулирующего колеса.
Следующим недостатком ближайшего аналога является требование высокой точности взаимного расположения постоянных магнитов и магнитоуправляемого сенсора, в частности их размещение на одной оси, так как преобразование углового перемещения регулировочного колеса в электрический сигнал осуществляется за счет отслеживания поворота полюсов постоянных магнитов магнитоуправляемым сенсором. Несоосное расположение постоянных магнитов и магнитоуправляемого сенсора приведет к нелинейной характеристике выходного сигнала сенсора в зависимости от угла поворота рукоятки, а соответственно и к искажению определения угла наклона рукоятки.
Следующим недостатком ближайшего аналога является преобразование углового перемещения регулировочного колеса в электрический сигнал за счет отслеживания магнитоуправляемым сенсором поворота полюсов постоянных магнитов, что приводит к уменьшению диапазона изменения выходного сигнала, уменьшению разрешающей способности пропорционального регулирования, увеличению влияния изменения температуры окружающей среды на относительное изменение выходного сигнала магнитоуправляемого сенсора.
Технической задачей, на решение которой направлено предлагаемое изобретение, является улучшение эксплуатационных свойств одноосевого джойстика путем повышения точности регулирования выходного сигнала.
Основным техническим результатом заявляемого изобретения является повышение точности регулирования выходного сигнала за счет увеличения диапазона изменения сигнала на выходе магнитоуправляемого сенсора, увеличение разрешающей способности пропорционального регулирования, уменьшение влияния изменения температуры окружающей среды на относительное изменение выходного сигнала магнитоуправляемого сенсора, сохранение точности регулирования в процессе эксплуатации.
Дополнительным техническим результатом является получение линейной характеристики выходного сигнала магнитоуправляемого сенсора в зависимости от угла поворота рукоятки.
Дополнительным техническим результатом является упрощение конструкции.
Для достижения указанного технического результата предлагается джойстик одноосевой пропорциональный, содержащий основание, рукоятку, соединенную с основанием посредством одноосевого цилиндрического шарнира, по меньшей мере один пружинный элемент, на опорные концы которого опираются основание и рукоятка, по меньшей мере один двухполюсный постоянный магнит, по меньшей мере один магнитоуправляемый сенсор, размещенный неподвижно относительно основания в зоне магнитного поля постоянного магнита. Постоянный магнит выполнен в форме объемного кольцевого сектора с постоянным поперечным сечением, с диаметральной намагниченностью вдоль его боковых поверхностей таким образом, что торцевые поверхности являются магнитными полюсами. Постоянный магнит неподвижно связан с рукояткой с возможностью движения, передаваемого от рукоятки, по траектории в виде дуги окружности, центр которой лежит на оси вращения рукоятки, а вогнутая поверхность постоянного магнита обращена к шарниру. Движение постоянного магнита обеспечивает изменение положения магнитоуправляемого сенсора в магнитном поле от одного полюса к другому.
Джойстик одноосевой пропорциональный является частью комплектации электронного устройства управления (далее по тексту ЭУУ). ЭУУ может представлять собой пульт дистанционного управления исполнительными органами машины, выполненный в виде отдельного переносного блока, содержащего собственную приборную панель с органами управления и индикации, либо ЭУУ может представлять собой стационарную панель управления, выполненную в виде приборной панели кабины машины, на которую установлены органы управления и индикации. Также ЭУУ может быть выполнен в виде шкафа управления, размещенного в составе машины, внутри которого установлена приборная панель с органами управления и индикации. Джойстик одноосевой пропорциональный устанавливают на приборную панель ЭУУ и закрепляют с помощью крепежных изделий, а выход магнитоуправляемого сенсора соединяют с электронной частью ЭУУ.
Магнитоуправляемый сенсор может быть размещен в основании или снаружи джойстика в составе ЭУУ в зоне магнитного поля постоянного магнита.
В случае, если магнитоуправляемый сенсор размещен в основании, то его устанавливают в полость со стороны боковой поверхности или со стороны выпуклой поверхности постоянного магнита. При этом, при установке джойстика на приборную панель ЭУУ, провода, присоединенные к магнитоуправляемому сенсору, выводят через отверстие в приборной панели ЭУУ и соединяют с электронной частью ЭУУ, где производится последующая обработка сигнала магнитоуправляемого сенсора.
Если магнитоуправляемый сенсор установлен снаружи джойстика, то его размещают в составе ЭУУ, например, с внутренней стороны приборной панели ЭУУ, выполненной из немагнитного материала, непосредственно под установленным на ней джойстиком со стороны выпуклой поверхности постоянного магнита. В этом случае магнитоуправляемый сенсор непосредственно соединяют с электронной частью ЭУУ и выполнение отверстия в приборной панели ЭУУ для вывода проводов не требуется.
Установка магнитоуправляемого сенсора может быть выполнена любым известным способом, например, путем размещения на печатной плате или с помощью фиксирующего вещества, например, клея.
Магнитоуправляемый сенсор может представлять собой пропорциональный аналоговый или цифровой сенсор Холла, либо аналогичный тип сенсора для пропорционального измерения магнитного поля.
В составе джойстика или ЭУУ может находиться более одного магнитоуправляемого сенсора для взаимодействия с одним постоянным магнитом, что позволит разделить считывание поворота постоянного магнита одним из магнитоуправляемых сенсоров в одном направлении наклона рукоятки и другим сенсором в другом направлении от вертикального положения рукоятки. Такое решение позволяет уменьшить размеры постоянного магнита.
В случае необходимости дублирования элементов электроники джойстика, в состав изделия может быть введена дополнительная взаимодействующая пара - магнитоуправляемый сенсор и постоянный магнит, которая будет располагаться с противоположной стороны от рабочей взаимодействующей пары.
Конструктивное исполнение одноосевого цилиндрического шарнира может быть реализовано любым известным способом, в том числе шарнир может представлять собой штифт или шипы, выполняться отдельной или единой деталью с основанием или с рукояткой.
Пружинный элемент имеет два опорных конца, и установлен таким образом, чтобы основание и рукоятка опирались на опорные концы для удерживания рукоятки в нейтральном положении и обеспечения возвратного сопротивления. Например, пружинный элемент может быть установлен в основании, в полости его верхней части, или в боковой полости, с выводом опорных концов в рукоятку, либо пружинный элемент может быть расположен в рукоятке, а опорные концы выведены в основание. Заявляемое изобретение поясняется фигурами.
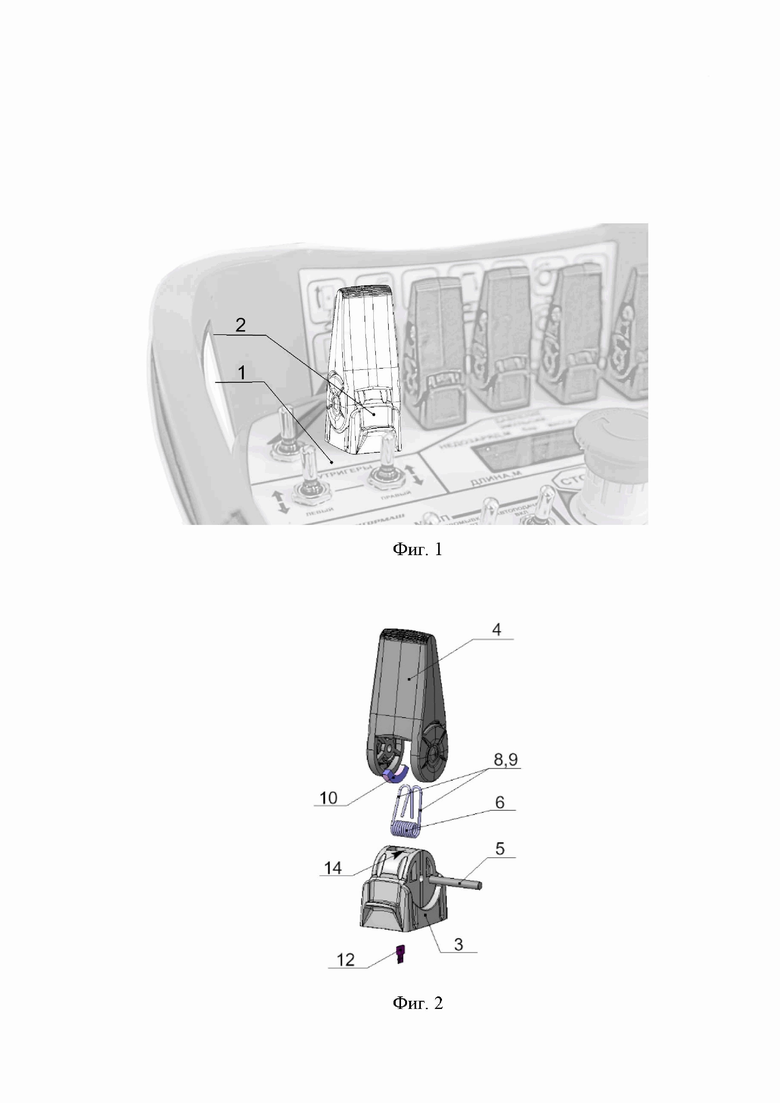
На фиг. 1 изображен общий вид джойстика в ракурсе 3/4, установленного на приборную панель ЭУУ, где ЭУУ представляет собой пульт дистанционного управления исполнительными органами машины и дополнительно содержит джойстики одноосевые и другие органы управления и индикации, где:
1 - приборная панель ЭУУ;
2 - джойстик.
На фиг. 2 изображен джойстик с пространственным разделением деталей, где:
3 - основание;
4 - рукоятка;
5 - шарнир;
6 - пружинный элемент;
8, 9 - опорные концы;
10 - постоянный магнит;
12 - магнитоуправляемый сенсор;
14 - полость для размещения пружины.
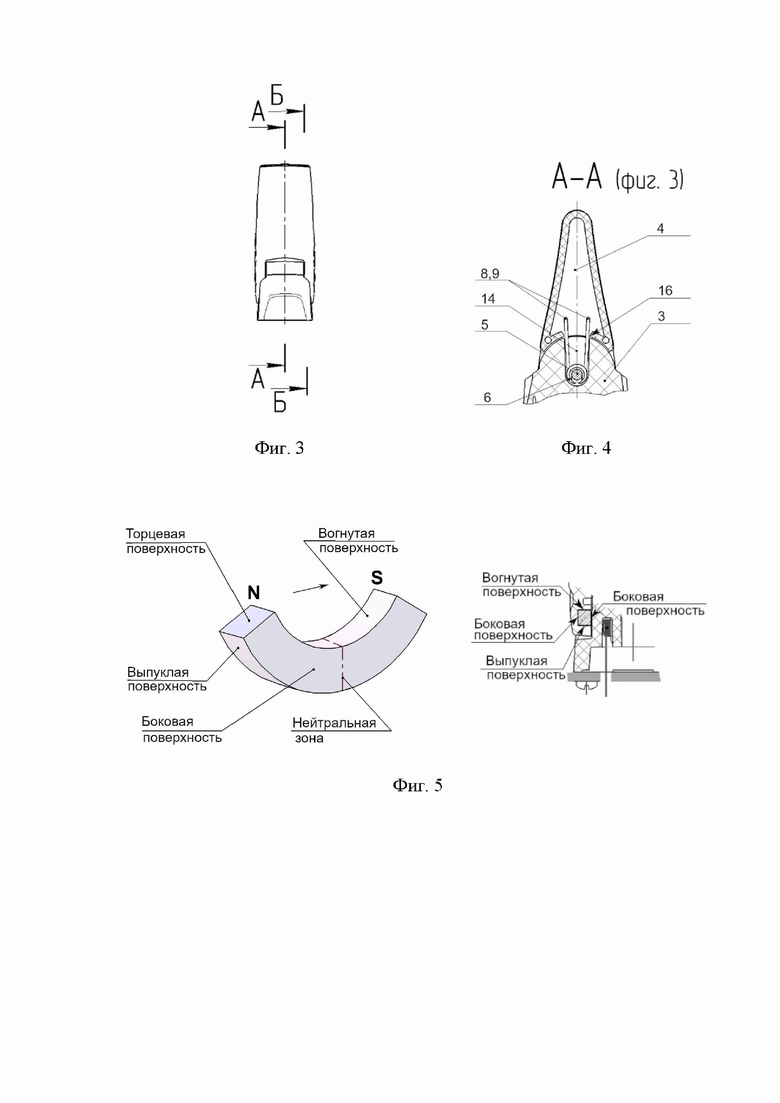
На фиг. 3 представлен вид спереди джойстика, содержащий линии сечения разрезов А-А (изображен на фиг. 4) и Б-Б (изображен на фиг. 12).
На фиг. 4 представлен разрез джойстика А-А, где:
3 - основание;
4 - рукоятка;
5 - шарнир;
6 - пружинный элемент;
8, 9 - опорные концы;
14 - полость для размещения пружины;
16 - вырез для размещения опорных концов.
На фиг. 5 изображен постоянный магнит, с указанием обозначением его поверхностей, в ракурсе 3/4 и в продольном разрезе джойстика.
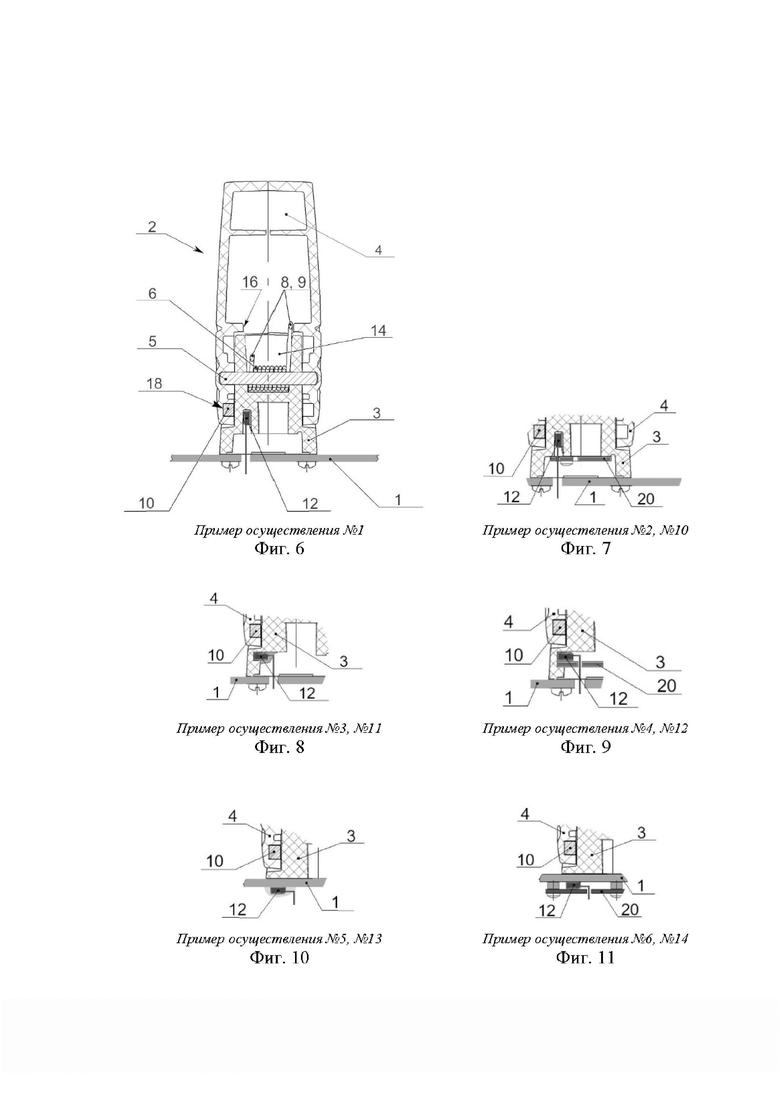
На фиг. 6 представлен продольный разрез джойстика согласно примеру осуществления №1, где (единая нумерация для всех фигур):
1 - приборная панель ЭУУ;
2 - джойстик;
3 - основание;
4 - рукоятка;
5 - шарнир;
6, 7 - пружинный элемент;
8, 9 - опорные концы;
10, 11 - постоянный магнит;
12, 13 - магнитоуправляемый сенсор;
14, 15 - полость для размещения пружины;
16, 17 - вырез для размещения опорных концов;
18, 19 - полость в рукоятке для установки постоянного магнита;
20 - печатная плата.
На фиг.7 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №2.
На фиг. 8 изображен фрагмент продольного разреза джойстика согласно примеру осуществления №3.
На фиг. 9 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №4.
На фиг. 10 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №5.
На фиг. 11 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №6.
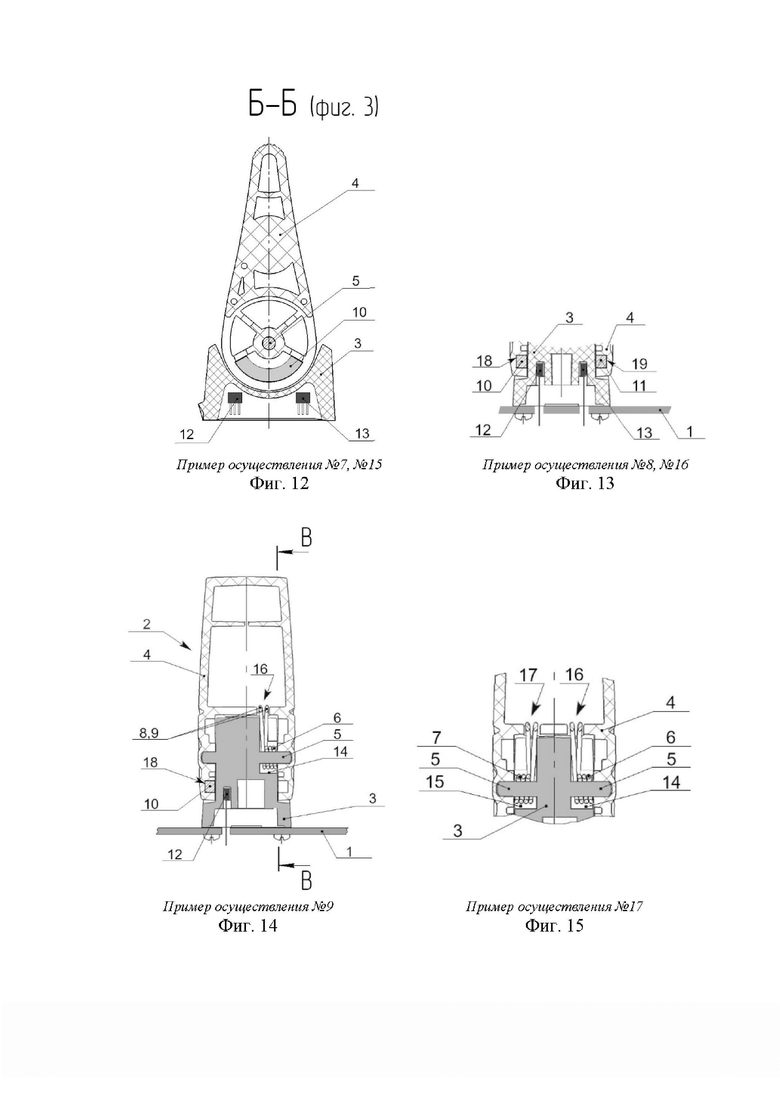
На фиг. 12 представлен разрез Б-Б джойстика (линии сечения разреза указаны на фиг. 3), иллюстрирующий пример осуществления №7.
На фиг. 13 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №8.
На фиг. 14 представлен продольный разрез джойстика, иллюстрирующий пример осуществления №9.
На фиг. 15 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №17.
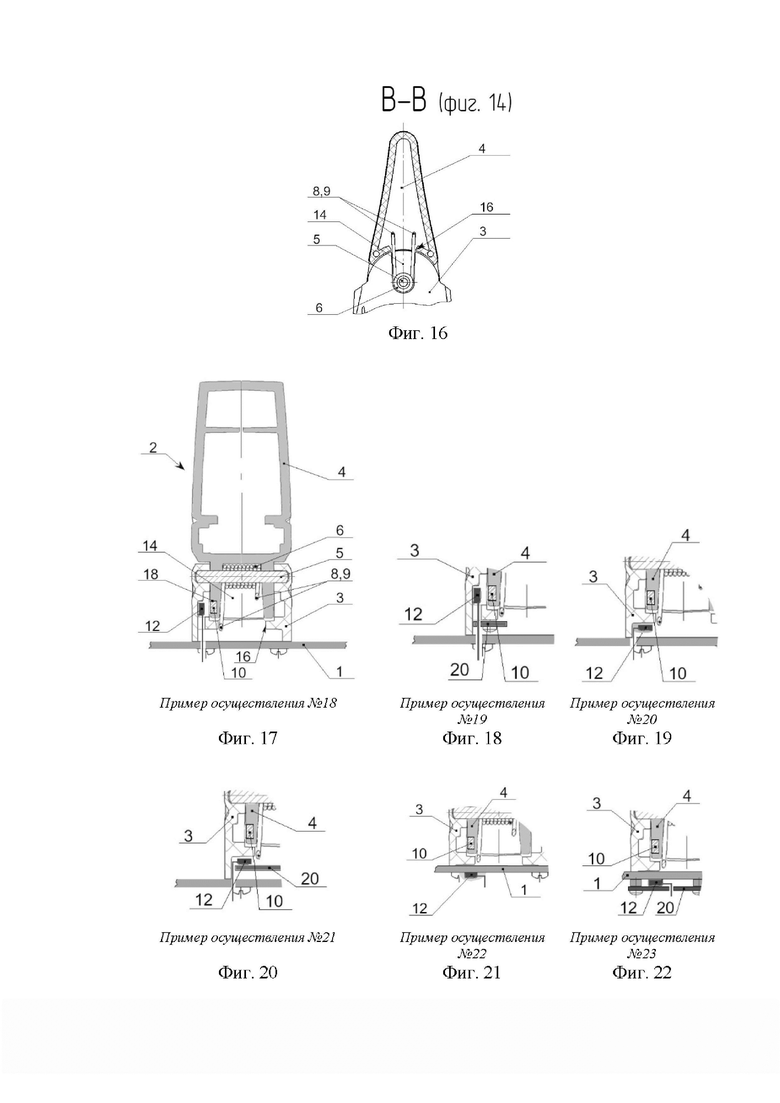
На фиг. 16 изображен разрез В-В джойстика (линии сечения разреза указаны на фиг. 14), поясняющий расположение пружинного элемента с боковой стороны основания джойстика.
На фиг. 17 представлен продольный разрез джойстика согласно примеру осуществления №18.
На фиг. 18 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №19.
На фиг. 19 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №20.
На фиг. 20 представлен продольный разрез джойстика, иллюстрирующий пример осуществления №21.
На фиг. 21 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №22.
На фиг. 22 изображен фрагмент продольного разреза джойстика согласно примеру осуществления №23.
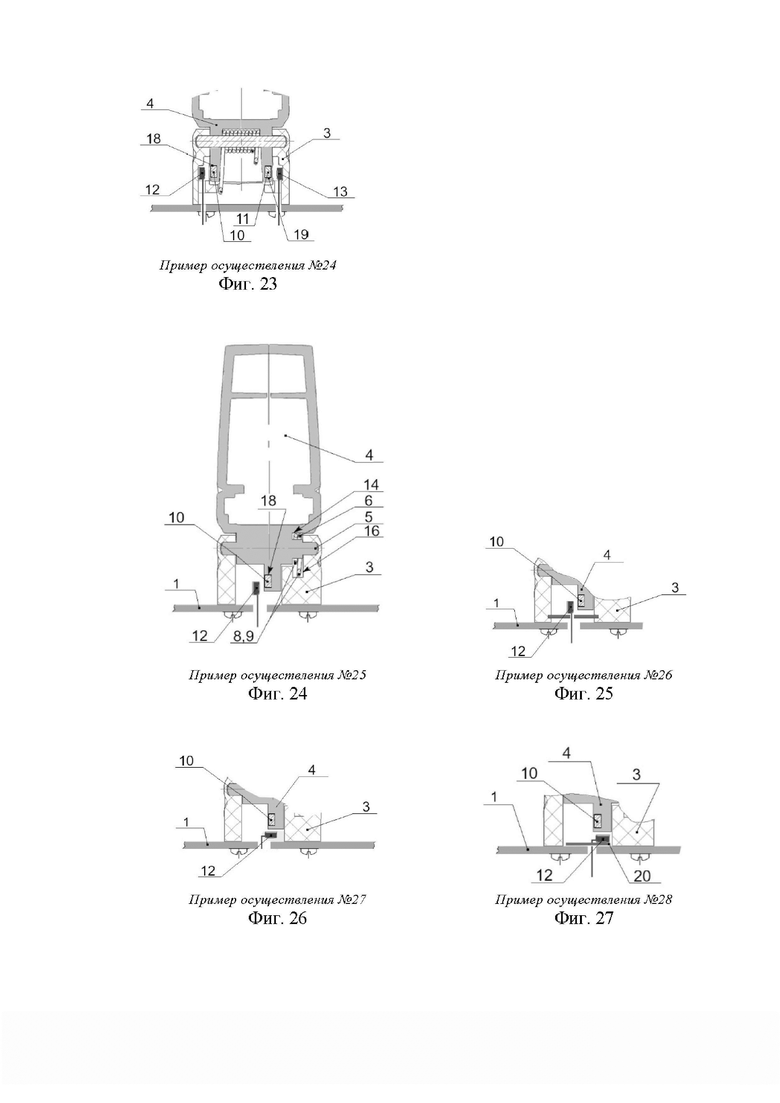
На фиг. 23 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №24.
На фиг. 24 представлен продольный разрез джойстика согласно примеру осуществления №25.
На фиг. 25 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №26.
На фиг. 26 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №27.
На фиг. 27 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №28.
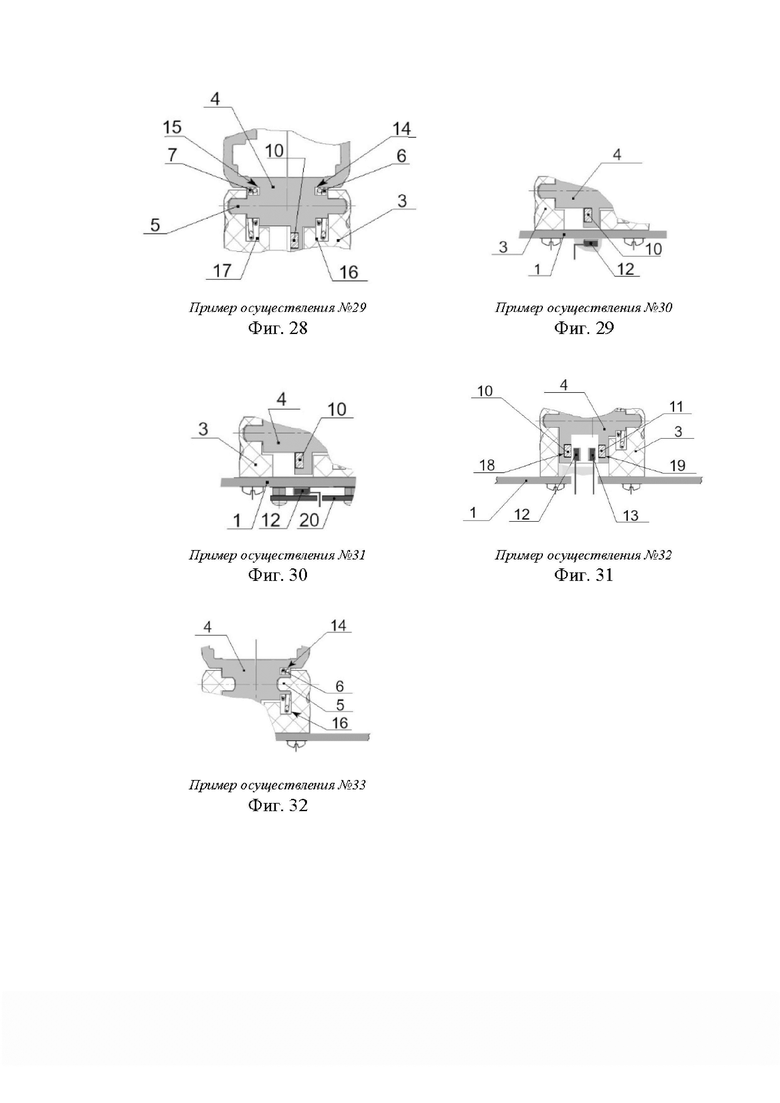
На фиг. 28 изображен фрагмент продольного разреза джойстика согласно примеру осуществления №29.
На фиг. 29 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №30.
На фиг. 30 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №31.
На фиг. 31 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №32.
На фиг. 32 представлен фрагмент продольного разреза джойстика согласно примеру осуществления №33.
Пример осуществления №1 (фиг. 6)
Джойстик 2 одноосевой пропорциональный, неподвижно установленный на приборную панель 1 ЭУУ, содержит основание 3, рукоятку 4, шарнир 5, пружинный элемент 6, представляющий собой пружину кручения, двухполюсный постоянный магнит 10, магнитоуправляемый сенсор 12. Основание 3 и рукоятка 4 выполнены из немагнитного материала и соединены между собой при помощи одноосевого цилиндрического шарнира 5, образованного нижней частью рукоятки 4, верхней частью основания 3 и штифтом, закрепленным между ними и являющимся опорой при вращении рукоятки 4.
Постоянный магнит 10 выполнен в форме объемного кольцевого сектора с постоянным поперечным сечением по всей длине, образованного вогнутой поверхностью, выпуклой поверхностью, двумя боковыми поверхностями и двумя торцевыми поверхностями. Постоянный магнит 10 имеет диаметральную намагниченность вдоль его боковых поверхностей, таким образом, что торцевые поверхности являются магнитными полюсами.
Магнитоуправляемый сенсор 12 размещен в основании 3, во внутренней полости, выполненной в боковой стенке основания 3. С боковых сторон основания 3 расположены симметричные полукруглые углубления. Верхняя часть основания 3 выполнена в форме на основе полуцилиндра, вдоль оси которого жестко закреплен штифт шарнира 5, являющийся также центрирующей осью для пружинного элемента 6, установленного в полости 14, которая выполнена в верхней части основания 3. Полость 14 выполнена в виде прямоугольного углубления, дно которого представляет собой вогнутую поверхность. Из полости 14 выступают два опорных конца 8 и 9 пружинного элемента 6.
На основание 3, с опорой на штифт шарнира 5 и пружинный элемент 6, установлена рукоятка 4. В нижней части рукоятки 4 сформирована шарнирная вилка, образованная двумя полукруглыми стенками, которые при сборке устанавливаются в боковые углубления основания 3. При этом концы штифта шарнира 5 установлены в ответные гнезда, выполненные с внутренней стороны боковых стенок рукоятки 4, и расположены на оси вращения рукоятки 4.
На внутренней вогнутой поверхности нижней части рукоятки 4, расположенной между двумя полукруглыми стенками, выполнен прямоугольный вырез 16, по форме, размерам и расположению соответствующий прямоугольному выходу полости 14. В нейтральном положении рукоятки 4 выход полости 14 и вырез 16 устанавливаются друг над другом. Опорные концы 8 и 9 пружинного элемента 6 опираются на стенки полости 14 и выреза 16.
С внутренней стороны боковой полукруглой стенки рукоятки 4 выполнена полость 18, дно которой имеет форму кольцевого сектора и которая расположена вдоль дуги окружности, центр которой лежит на оси цилиндрического шарнира 5. В полость 18 установлен постоянный магнит 10 любым известным способом, например, с помощью клея. Рукоятка 4, при установке на основание 3, ориентирована таким образом, чтобы ее боковая стенка, содержащая постоянный магнит 10, была установлена на основание 3 со стороны расположения магнитоуправляемого сенсора 12. В связи с этим магнитоуправляемый сенсор 12, установленный в полости основания 3, расположен в зоне магнитного поля с боковой стороны постоянного магнита 10, закрепленного в боковой стенке рукоятки 4.
В приборной панели 1 ЭУУ выполнено отверстие, расположенное непосредственно под основанием 3 джойстика 2, через которое провода, соединенные с магнитоуправляемым сенсором 12, выводят в ЭУУ, где они соединяются с электронной частью ЭУУ для последующей обработки сигнала с магнитоуправляемого сенсора 12.
При установке на приборную панель 1 ЭУУ, основание 3 герметизируют любым известным способом, например, путем прокладки резинового уплотнения между основанием 3 и поверхностью приборной панели 1 ЭУУ.
Пример осуществления №2 (фиг. 7)
Конструкция повторяет конструкцию, описанную в примере осуществления №1 (по изобретению), но, в отличие от конструкции по примеру осуществления №1, магнитоуправляемый сенсор 12, размещенный в основании 3, смонтирован на печатной плате 20, установленной в нижней части основания 3.
Пример осуществления №3 (фиг. 8)
Конструкция повторяет конструкцию, описанную в примере осуществления №1 (по изобретению), но, в отличие от конструкции по примеру осуществления №1, магнитоуправляемый сенсор 12, размещенный в основании 3, размещен со стороны выпуклой поверхности постоянного магнита 10.
Пример осуществления №4 (фиг. 9)
Конструкция повторяет конструкцию, описанную в примере осуществления №3 (по изобретению), но, в отличие от конструкции по примеру осуществления №3, магнитоуправляемый сенсор 12, размещенный в основании 3, установлен на печатной плате 20 со стороны выпуклой поверхности постоянного магнита 10.
Устройство согласно примерам осуществления №1-№4 работает следующим образом. При работе, оператор, выполняя операции пропорционального управления исполнительным механизмом, наклоняет рукоятку 4 джойстика 2 в одну сторону, либо в противоположную относительно нейтрального положения, при этом, при изменении угла наклона рукоятки 4, постоянный магнит 10 перемещается по траектории в виде дуги окружности, центр которой лежит на оси вращения рукоятки 4. Движение постоянного магнита 10 осуществляется относительно неподвижного магнитоуправляемого сенсора 12, размещенного в основании 3 в зоне магнитного поля постоянного магнита 10. В нейтральном положении рукоятки 4 постоянный магнит 10 устанавливается по отношению к магнитоуправляемому сенсору 12 нейтральной зоной, в области которой величина магнитной индукции равна нулю.
По отношению к постоянному магниту 10, в течение всего хода рукоятки 4, магнитоуправляемый сенсор 12 меняет свое положение в магнитном поле, удаляясь от одного полюса и одновременно приближаясь к противоположному полюсу, в связи с чем происходит изменение выходного сигнала магнитоуправляемого сенсора 12, который затем обрабатывается ЭУУ.
В нейтральном положении рукоятки 4 выход полости 14 основания 3 и вырез 16 рукоятки 4 устанавливаются друг над другом, при этом опорные концы 8 и 9 опираются на стенки полости 14 и выреза 16.
При отклонении рукоятки 4 от нейтрального положения, вырез 16 смещается относительно выхода полости 14, нажимая на один из опорных концов пружинного элемента 6. При наклоне рукоятки 4 в другом направлении от нейтрального положения, рукоятка 4 нажимает на другой опорный конец пружинного элемента 6. Таким образом, пружинный элемент 6 обеспечивает упругость узла вращения рукоятки 4, а также возврат в нейтральное положение при отсутствии механического воздействия оператором на рукоятку 4.
Конструкция джойстика спроектирована таким образом, что при возникновении износа стенок полости 14 и выреза 16, служащих упором для опорных концов 8, 9 пружинного элемента 6, происходит компенсация возникающего люфта.
Пример осуществления №5 (фиг. 10)
Конструкция повторяет конструкцию, описанную в примере осуществления №1 (по изобретению), но, в отличие от конструкции по примеру осуществления №1, магнитоуправляемый сенсор 12 размещен вне джойстика, в составе ЭУУ, и закреплен с внутренней стороны приборной панели 1 ЭУУ любым известным способом, например, с помощью клея. При этом магнитоуправляемый сенсор 12 размещен со стороны выпуклой поверхности постоянного магнита 10. Провода, связанные с магнитоуправляемым сенсором 12, непосредственно соединены с электронной частью ЭУУ для последующей обработки сигнала от магнитоуправляемого сенсора 12.
При установке на приборную панель 1 ЭУУ, джойстик 2 не требует герметизации, так как не содержит электронных элементов. Пример осуществления №6 (фиг. 11):
Конструкция повторяет конструкцию, описанную в примере осуществления №5 (по изобретению), но, в отличие от конструкции по примеру осуществления №5, магнитоуправляемый сенсор 12, входящий в состав ЭУУ, смонтирован на печатной плате 20, установленной с внутренней стороны приборной панели 1 ЭУУ, и, аналогично примеру осуществления №5 (по изобретению), магнитоуправляемый сенсор 12 размещен со стороны выпуклой поверхности постоянного магнита 10. Печатная плата 20 с магнитоуправляемым сенсором 12, соединена с электронной частью ЭУУ для последующей обработки сигнала от магнитоуправляемого сенсора 12, либо печатная плата 20 является продолжением электронной платы ЭУУ которая выполняет обработку сигнала от магнитоуправляемого сенсора 12.
При установке на приборную панель ЭУУ 1, джойстик 2 не требует герметизации, так как не содержит электронных элементов.
Устройство согласно примерам осуществления №5, №6 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №1-№4 (по изобретению), но, в отличие от описания в динамике для примеров осуществления №1-№4, движение постоянного магнита 10 осуществляется относительно неподвижного магнитоуправляемого сенсора 12, размещенного снаружи джойстика в составе ЭУУ, со стороны выпуклой поверхности постоянного магнита 10, в зоне его магнитного поля.
Пример осуществления №7 (фиг. 12)
Конструкция повторяет конструкцию, описанную в примере осуществления №1 (по изобретению), но, в отличие от конструкции по примеру осуществления №1, джойстик одноосевой пропорциональный дополнительно содержит магнитоуправляемый сенсор 13. При этом магнитоуправляемые сенсоры 12, 13 установлены в основании 3, вдоль одной из поверхностей (боковой или выпуклой) постоянного магнита 10 и расположены симметрично с двух сторон от нейтральной зоны постоянного магнита 10.
Устройство согласно примеру осуществления №7 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №1-№4 (по изобретению), но, в отличие от описания в динамике для примеров осуществления №1-№4, движение постоянного магнита 10 осуществляется относительно двух неподвижных магнитоуправляемых сенсоров 12 и 13, размещенных в основании 3. При наклоне рукоятки 4 в одну сторону от нейтрального положения и обратно до нейтрально положения, контроль перемещения постоянного магнита 10 осуществляется одним из магнитоуправляемых сенсоров 12 или 13, и соответственно, при наклоне рукоятки 4 в противоположную сторону и обратно до нейтрально положения, перемещение постоянного магнита 10 отслеживается другим магнитоуправляемым сенсором.
Пример осуществления №8 (фиг. 13)
Конструкция повторяет конструкцию, описанную в примере осуществления №1 (по изобретению), но, в отличие от конструкции по примеру осуществления №1, джойстик 2 одноосевой пропорциональный содержит дополнительную взаимодействующую пару - магнитоуправляемый сенсор и постоянный магнит. Второй магнитоуправляемый сенсор 13, размещен в основании 3, с противоположной от стороны расположения магнитоуправляемого сенсора 12. Второй постоянный магнит 11 установлен в полость 19 рукоятки 4, выполненную с внутренней стороны противоположной боковой полукруглой стенки рукоятки 4.
Устройство согласно примеру осуществления №8 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №1-№4 (по изобретению), но, в отличие от описания в динамике для примеров осуществления №1-№4, в случае отказа магнитоуправляемого сенсора 12, ЭУУ обработает сигнал от магнитоуправляемого сенсора 13, который составляет дублирующую пару с постоянным магнитом 11. Постоянный магнит 11 движется параллельно и одновременно с постоянным магнитом 10, при этом магнитоуправляемый сенсор 13 отслеживает вращение рукоятки 4 аналогично принципу работы, описанному в динамике для примеров №1-№4 (по изобретению).
Пример осуществления №9 (фиг. 14, 16)
Джойстик 2 одноосевой пропорциональный, неподвижно установленный на приборную панель 1 ЭУУ, содержит основание 3, рукоятку 4, шарнир 5, пружинный элемент 6, представляющий собой пружину кручения, двухполюсный постоянный магнит 10, магнитоуправляемый сенсор 12.
Основание 3 и рукоятка 4 выполнены из немагнитного материала и соединены между собой при помощи одноосевого цилиндрического шарнира 5, образованного нижней частью рукоятки 4, верхней частью основания 3 и шипами, выполненными единой деталью с основанием 3 и являющимися опорой при вращении рукоятки 4.
Постоянный магнит 10 выполнен в форме объемного кольцевого сектора с постоянным поперечным сечением по всей длине, образованного вогнутой поверхностью, выпуклой поверхностью, двумя боковыми поверхностями и двумя торцевыми поверхностями. Постоянный магнит 10 имеет диаметральную намагниченность вдоль его боковых поверхностей, таким образом, что торцевые поверхности являются магнитными полюсами.
Магнитоуправляемый сенсор 12 размещен в основании 3, во внутренней полости, выполненной в боковой стенке основания 3. С боковых сторон основания 3 расположены симметричные полукруглые углубления. Верхняя часть основания 3 выполнена в форме на основе полуцилиндра, вдоль оси которого, с боковых сторон полуцилиндра расположены шипы, выполняющие функцию шарнира 5. Вокруг одного из шипов шарнира 5 образована полость 14, предназначенная для размещения пружинного элемента 6. В верхней части полости 14 выполнен сквозной вырез для вывода опорных концов пружинного элемента 6. Шип шарнира 5, расположенный в центре полости 14 выполняет также функцию центрирующей оси для пружинного элемента 6.
На основание 3, с опорой на шипы шарнира 5 и пружинный элемент 6, установлена рукоятка 4, в нижней части которой сформирована шарнирная вилка, образованная двумя полукруглыми стенками, ограничивающими вогнутую полуцилиндрическую поверхность. С внутренней стороны полукруглых стенок рукоятки 4 выполнены ответные гнезда, в которые при сборке устанавливаются шипы шарнира 5. На вогнутой поверхности нижней части рукоятки 4, выполнен прямоугольный вырез 16, по форме, размерам и расположению соответствующий выходу полости 14 основания 3. В нейтральном положении рукоятки 4 выход полости 14 и вырез 16 устанавливаются друг над другом. Опорные концы 8,9 пружинного элемента 6 опираются на стенки выхода полости 14 и выреза 16 рукоятки 4.
С внутренней стороны боковой полукруглой стенки рукоятки 4 выполнена полость 18, дно которой имеет форму кольцевого сектора, которая расположена вдоль дуги окружности, центр которой лежит на оси цилиндрического шарнира 5. В полость 18 установлен постоянный магнит 10 любым известным способом, например, с помощью клея. Рукоятка 4, при установке на основание 3, ориентирована таким образом, чтобы ее боковая стенка, содержащая постоянный магнит 10, была установлена на основание 3 со стороны расположения магнитоуправляемого сенсора 12. В связи с чем магнитоуправляемый сенсор 12, установленный в полости основания 3, расположен в зоне магнитного поля с боковой стороны постоянного магнита 10, закрепленного в боковой стенке рукоятки 4.
В приборной панели 1 ЭУУ выполнено отверстие, расположенное непосредственно под основанием 3 джойстика 2, через которое провода, соединенные с магнитоуправляемым сенсором 12, выводят в ЭУУ, где они соединяются с электронной частью ЭУУ для последующей обработки сигнала с магнитоуправляемого сенсора 12.
При установке на приборную панель 1 ЭУУ, основание 3 герметизируют любым известным способом, например, путем прокладки резинового уплотнения между основанием 3 и поверхностью приборной панели 1 ЭУУ.
Пример осуществления №10 (фиг. 7)
Конструкция повторяет конструкцию, описанную в примере осуществления №9 (по изобретению), но, в отличие от конструкции по примеру осуществления №9, магнитоуправляемый сенсор 12, размещенный в основании 3, смонтирован на печатной плате 20, установленной в нижней части основания 3.
Пример осуществления №11 (фиг. 8)
Конструкция повторяет конструкцию, описанную в примере осуществления №9 (по изобретению), но, в отличие от конструкции по примеру осуществления №9, магнитоуправляемый сенсор 12, размещенный в основании 3, установлен со стороны выпуклой поверхности постоянного магнита 10.
Пример осуществления №12 (фиг. 9)
Конструкция повторяет конструкцию, описанную в примере осуществления №11 (по изобретению), но, в отличие от конструкции по примеру осуществления №11, магнитоуправляемый сенсор 12, размещенный в основании 3, установлен на печатной плате 20 со стороны выпуклой поверхности постоянного магнита 10.
Устройство согласно примерам осуществления №9-№12 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №1-№4 (по изобретению).
Пример осуществления №13 (фиг. 10)
Конструкция повторяет конструкцию, описанную в примере осуществления №9 (по изобретению), но, в отличие от конструкции по примеру осуществления №9, магнитоуправляемый сенсор 12 размещен вне джойстика, в составе ЭУУ, и закреплен с внутренней стороны приборной панели 1 ЭУУ любым известным способом, например, с помощью клея. При этом магнитоуправляемый сенсор 12 размещен со стороны выпуклой поверхности постоянного магнита 10. Провода, связанные с магнитоуправляемым сенсором 12, непосредственно соединены с электронной частью ЭУУ для последующей обработки сигнала от магнитоуправляемого сенсора 12.
При установке на приборную панель 1 ЭУУ, джойстик 2 не требует герметизации, так как не содержит электронных элементов. Пример осуществления №14 (фиг. 11):
Конструкция повторяет конструкцию, описанную в примере осуществления №13 (по изобретению), но, в отличие от конструкции по примеру осуществления №13, магнитоуправляемый сенсор 12, входящий в состав ЭУУ, смонтирован на печатной плате 20, установленной с внутренней стороны приборной панели 1 ЭУУ, и, аналогично примеру осуществления №13 (по изобретению), магнитоуправляемый сенсор 12 размещен со стороны выпуклой поверхности постоянного магнита 10. Печатная плата 20 с магнитоуправляемым сенсором 12, соединена с электронной частью ЭУУ для последующей обработки сигнала от магнитоуправляемого сенсора 12, либо печатная плата 20 является продолжением электронной платы ЭУУ, которая выполняет обработку сигнала от магнитоуправляемого сенсора 12.
При установке на приборную панель ЭУУ 1, джойстик 2 не требует герметизации, так как не содержит электронных элементов.
Устройство согласно примерам осуществления №13, №14 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №5, №6 (по изобретению).
Пример осуществления №15 (фиг. 12)
Конструкция повторяет конструкцию, описанную в примере осуществления №9 (по изобретению), но, в отличие от конструкции по примеру осуществления №9, джойстик одноосевой пропорциональный дополнительно содержит магнитоуправляемый сенсор 13. При этом магнитоуправляемые сенсоры 12, 13 установлены в основании, вдоль одной из поверхностей (боковой или выпуклой) постоянного магнита 10 и расположены симметрично с двух сторон от нейтральной зоны постоянного магнита 10.
Устройство согласно примерам осуществления №15 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примера №7 (по изобретению).
Пример осуществления №16 (фиг. 13)
Конструкция повторяет конструкцию, описанную в примере осуществления №9 (по изобретению), но, в отличие от конструкции по примеру осуществления №9, джойстик одноосевой пропорциональный содержит дополнительную взаимодействующую пару - магнитоуправляемый сенсор и постоянный магнит. Второй магнитоуправляемый сенсор 13, размещен в основании 3, с противоположной от стороны расположения магнитоуправляемого сенсора 12. Второй постоянный магнит 11 установлен в полость 19 рукоятки 4, выполненную с внутренней стороны противоположной боковой полукруглой стенки рукоятки 4.
Устройство согласно примеру осуществления №16 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №8 (по изобретению).
Пример осуществления №17 (фиг. 15, 16)
Конструкция повторяет конструкцию, описанную в примере осуществления №9 (по изобретению), но, в отличие от конструкции по примеру осуществления №9, джойстик 2 дополнительно содержит пружинный элемент 7, представляющий собой пружину кручения. Пружинные элементы 6, 7 установлены в симметрично расположенных полостях 14 и 15, образованных вокруг шипов шарнира 5. Шипы шарнира 5 расположены с боковых сторон основания 3. В верхней части каждой из полостей 14, 15 выполнен сквозной вырез для вывода опорных концов пружинных элементов 6 и 7 соответственно. На вогнутой полуцилиндрической поверхности нижней части рукоятки 4, выполнены прямоугольные вырезы 16, 17, по форме, размерам и расположению соответствующие выходами полостей 14, 15 основания 3. В нейтральном положении рукоятки 4 вырезы 16, 17 устанавливаются над выходами полостей 14, 15 основания 3. Опорные концы пружинного элемента 6 опираются на стенки выхода полости 14 и выреза 16. Опорные концы пружинного элемента 7 опираются на стенки выхода полости 15 и выреза 17 рукоятки 4. Шипы шарнира 5, выполняют также функцию центрирующей оси для пружинных элементов 6 и 7.
Устройство согласно примеру осуществления №17 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №9-№12 (по изобретению), но, в отличие от описания в динамике для примеров осуществления №9-№12, в нейтральном положении рукоятки выход полости 14 и вырез 16 устанавливаются друг над другом, при этом опорные концы пружинного элемента 6 опираются на стенки полости 14 и выреза 16. Одновременно с этим, выход полости 15 и вырез 17 устанавливаются друг над другом, при этом опорные концы пружинного элемента 7 опираются на стенки полости 15 и выреза 17.
При наклоне рукоятки 4 от нейтрального положения, вырез 16 смещается относительно выхода полости 14, нажимая на один из опорных концов пружинного элемента 6, одновременно с этим вырез 17 смещается относительно выхода полости 15, нажимая на один из опорных концов пружинного элемента 7. При наклоне рукоятки 4 в противоположном направлении от нейтрального положения, рукоятка 4 нажимает на другие опорные концы пружинных элементов 6 и 7. Таким образом пружинный элемент 6, совместно с пружинным элементом 7 обеспечивают упругость узла вращения рукоятки 4, а также возврат в нейтральное положение при отсутствии механического воздействия оператором на рукоятку 4.
Пример осуществления №18 (фиг. 17)
Джойстик 2 одноосевой пропорциональный, неподвижно установленный на приборную панель 1 ЭУУ, содержит основание 3, рукоятку 4, шарнир 5, пружинный элемент 6, представляющий собой пружину кручения, двухполюсный постоянный магнит 10, магнитоуправляемый сенсор 12. Основание 3 и рукоятка 4 выполнены из немагнитного материала и соединены между собой при помощи одноосевого цилиндрического шарнира 5, образованного нижней частью рукоятки 4, верхней частью основания 3 и штифтом, закрепленной между ними и являющимся опорой при вращении рукоятки 4.
Постоянный магнит 10 выполнен в форме объемного кольцевого сектора с постоянным поперечным сечением по всей длине, образованного вогнутой поверхностью, выпуклой поверхностью, двумя боковыми поверхностями и двумя торцевыми поверхностями. Постоянный магнит 10 имеет диаметральную намагниченность вдоль его боковых поверхностей, таким образом, что торцевые поверхности являются магнитными полюсами.
Магнитоуправляемый сенсор 12 размещен в основании 3, во внутренней полости, выполненной в боковой стенке основания 3.
Нижняя часть рукоятки 4 выполнена в форме на основе полуцилиндра, вдоль оси которого жестко закреплен штифт шарнира 5, являющийся также центрирующей осью для пружинного элемента 6, установленного в полости 14, которая выполнена в нижней части рукоятки 4. Полость 14 выполнена в виде прямоугольного углубления, дно которого представляет собой вогнутую поверхность. Из полости 14 выступают два опорных конца 8, 9 пружинного элемента 6.
В основание 3 установлена рукоятка 4, при этом в верхней части основания 3 сформирована шарнирная вилка, образованная двумя полукруглыми боковыми стенками, содержащими ответные гнезда, предназначенные для установки концов штифта шарнира 5, жестко закрепленного в нижней части рукоятки 4.
В основании 3 между двумя полукруглыми стенками расположен прямоугольный вырез 16, по форме, размерам и расположению соответствующий прямоугольному выходу полости 14. В нейтральном положении рукоятки 4 выход полости 14 и вырез 16 устанавливаются друг над другом. Опорные концы пружинного элемента 6 опираются на стенки полости 14 и выреза 16.
С боковой стороны полуцилиндрической поверхности нижней части рукоятки 4 выполнена полость 18, дно которой имеет форму кольцевого сектора и которая расположена вдоль дуги окружности, центр которой лежит на оси цилиндрического шарнира 5. В полость 18 установлен постоянный магнит 10 любым известным способом, например, с помощью клея. Рукоятка 4, при установке на основание 3, ориентирована таким образом, чтобы ее сторона, содержащая постоянный магнит 10, была установлена в основание 3 со стороны расположения магнитоуправляемого сенсора 12. В связи с этим магнитоуправляемый сенсор 12, установленный в полости основания 3, расположен в зоне магнитного поля с боковой стороны постоянного магнита 10.
В приборной панели 1 ЭУУ выполнено отверстие, расположенное непосредственно под основанием 3 джойстика 2, через которое провода, соединенные с магнитоуправляемым сенсором 12, выводят в ЭУУ, где они соединяются с электронной частью ЭУУ для последующей обработки сигнала с магнитоуправляемого сенсора 12.
При установке на приборную панель 1 ЭУУ, основание 3 герметизируют любым известным способом, например, путем прокладки резинового уплотнения между основанием 3 и поверхностью приборной панели 1 ЭУУ.
Пример осуществления №19 (фиг. 18)
Конструкция повторяет конструкцию, описанную в примере осуществления №18 (по изобретению), но, в отличие от конструкции по примеру осуществления №18, магнитоуправляемый сенсор 12, размещенный в основании 3, с боковой стороны постоянного магнита 10, смонтирован на печатной плате 20, установленной в нижней части основания 3.
Пример осуществления №20 (фиг. 19)
Конструкция повторяет конструкцию, описанную в примере осуществления №18 (по изобретению), но, в отличие от конструкции по примеру осуществления №18, магнитоуправляемый сенсор 12, установленный в полости основания 3, расположен в зоне магнитного поля со стороны выпуклой поверхности постоянного магнита 10.
Пример осуществления №21 (фиг. 20)
Конструкция повторяет конструкцию, описанную в примере осуществления №20 (по изобретению), но, в отличие от конструкции по примеру осуществления №20, магнитоуправляемый сенсор 12, размещенный в основании 3, со стороны выпуклой поверхности постоянного магнита 10, смонтирован на печатной плате 20, установленной в нижней части основания 3.
Устройство согласно примерам осуществления №18-№21 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №1-№4 (по изобретению), но, в отличие от описания в динамике для примеров осуществления №1-№4, при наклоне рукоятки 4 от нейтрального положения, выход полости 14 рукоятки 4 смещается относительно выреза 16 основания 3, нажимая на один из опорных концов пружинного элемента 6. При наклоне рукоятки 4 в другом направлении от нейтрального положения, рукоятка 4 нажимает на другой опорный конец пружинного элемента 6. Таким образом, пружинный элемент 6 обеспечивает упругость узла вращения рукоятки 4, а также возврат в нейтральное положение при отсутствии механического воздействия оператором на рукоятку 4.
Пример осуществления №22 (фиг. 21)
Конструкция повторяет конструкцию, описанную в примере осуществления №18 (по изобретению), но, в отличие от конструкции по примеру осуществления №18, магнитоуправляемый сенсор 12 размещен вне джойстика, в составе ЭУУ, и закреплен с внутренней стороны приборной панели 1 ЭУУ любым известным способом, например, с помощью клея. При этом магнитоуправляемый сенсор 12 размещен со стороны выпуклой поверхности постоянного магнита 10. Провода, связанные с магнитоуправляемым сенсором 12, непосредственно соединены с электронной частью ЭУУ для последующей обработки сигнала от магнитоуправляемого сенсора 12.
При установке на приборную панель 1 ЭУУ, джойстик 2 не требует герметизации, так как не содержит электронных элементов.
Пример осуществления №23 (фиг. 22)
Конструкция повторяет конструкцию, описанную в примере осуществления №22 (по изобретению), но, в отличие от конструкции по примеру осуществления №22, магнитоуправляемый сенсор 12, входящий в состав ЭУУ, смонтирован на печатной плате 20, установленной с внутренней стороны приборной панели 1 ЭУУ, и, аналогично примеру осуществления №22 (по изобретению), магнитоуправляемый сенсор 12 размещен со стороны выпуклой поверхности постоянного магнита 10. Печатная плата 20 с магнитоуправляемым сенсором 12, соединена с электронной частью ЭУУ для последующей обработки сигнала от магнитоуправляемого сенсора 12, либо печатная плата 20 является продолжением электронной платы ЭУУ в которой выполняется обработка сигнала от магнитоуправляемого сенсора 12.
При установке на приборную панель ЭУУ 1, джойстик 2 не требует герметизации, так как не содержит электронных элементов.
Устройство согласно примерам осуществления №22, №23 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №18-№21 (по изобретению), но, в отличие от описания в динамике для примеров осуществления №18-№21, движение постоянного магнита 10 осуществляется относительно неподвижного магнитоуправляемого сенсора 12, размещенного снаружи джойстика в составе ЭУУ, со стороны выпуклой поверхности постоянного магнита 10, в зоне его магнитного поля.
Пример осуществления №24 (фиг. 23)
Конструкция повторяет конструкцию, описанную в примере осуществления №18 (по изобретению), но, в отличие от конструкции по примеру осуществления №18, джойстик одноосевой пропорциональный содержит дополнительную взаимодействующую пару - магнитоуправляемый сенсор и постоянный магнит. Второй магнитоуправляемый сенсор 13, размещен в основании 3, с противоположной от стороны расположения магнитоуправляемого сенсора 12. Второй постоянный магнит 11 установлен в полость 19 рукоятки 4, выполненную с противоположной боковой стороны нижней части рукоятки 4.
Устройство согласно примеру осуществления №24 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №18-№21 (по изобретению), но, в отличие от описания в динамике для примеров осуществления №18-№21, в случае отказа магнитоуправляемого сенсора 12, ЭУУ обработает сигнал от магнитоуправляемого сенсора 13, который составляет дублирующую пару с постоянным магнитом 11. Постоянный магнит 11 движется параллельно и одновременно с постоянным магнитом 10, при этом магнитоуправляемый сенсор 13 отслеживает вращение рукоятки 4 аналогично принципу работы, описанному в динамике для примеров №18-№21 (по изобретению).
Пример осуществления №25 (фиг. 24)
Джойстик 2 одноосевой пропорциональный, неподвижно установленный на приборную панель 1 ЭУУ, содержит основание 3, рукоятку 4, шарнир 5, пружинный элемент 6, представляющий собой пружину кручения, двухполюсный постоянный магнит 10, магнитоуправляемый сенсор 12. Основание 3 и рукоятка 4 выполнены из немагнитного материала и соединены между собой при помощи одноосевого цилиндрического шарнира 5, образованного нижней частью рукоятки 4, верхней частью основания 3 и шипами, выполненными с боковых сторон нижней части рукоятки 4.
Постоянный магнит 10 выполнен в форме объемного кольцевого сектора с постоянным поперечным сечением по всей длине, образованного вогнутой поверхностью, выпуклой поверхностью, двумя боковыми поверхностями и двумя торцевыми поверхностями. Постоянный магнит 10 имеет диаметральную намагниченность вдоль его боковых поверхностей, таким образом, что торцевые поверхности являются магнитными полюсами.
Магнитоуправляемый сенсор 12 размещен в основании 3, в его внутренней полости.
Нижняя часть рукоятки 4 имеет форму на основе полуцилиндра и содержит выемки. С боковых сторон нижней части рукоятки 3 размещены шипы шарнира 5, выполненные единой деталью с рукояткой 4 и расположенные на оси вращения рукоятки 4.
Пружинный элемент 6 установлен в полость 14, образованную вокруг шипа с боковой стороны нижней части рукоятки 4. В нижней части полость 14 имеет сквозной вырез для вывода опорных концов 8, 9 пружинного элемента 6.
В основание 3 установлена рукоятка 4. В верхней части основания 3 сформирована шарнирная вилка, образованная двумя полукруглыми боковыми стенками, содержащими ответные гнезда, предназначенные для установки шипов шарнира 5.
В основании 3 между двумя полукруглыми стенками выполнен прямоугольный вырез 16, по форме, размерам и расположению соответствующий выходу полости 14. В нейтральном положении рукоятки 4 выход полости 14 и вырез 16 устанавливаются друг над другом. Опорные концы 8, 9 пружинного элемента 6 опираются на стенки выхода полости 14 и выреза 16.
С боковой стороны полуцилиндрической части рукоятки 4 выполнена полость 18, дно которой имеет форму кольцевого сектора. Полость 18 расположена вдоль дуги окружности, центр которой лежит на оси цилиндрического шарнира 5. В полость 18 установлен постоянный магнит 10 любым известным способом, например, с помощью клея. Рукоятка 4, при установке в основание 3, ориентирована таким образом, чтобы магнитоуправляемый сенсор 12, расположенный в основании 3 находился в зоне действия постоянного магнита 10.
В приборной панели 1 ЭУУ выполнено отверстие, расположенное непосредственно под основанием 3 джойстика 2, через которое провода, соединенные с магнитоуправляемым сенсором 12, заводят в ЭУУ, где они соединяются с электронной частью ЭУУ для последующей обработки сигнала с магнитоуправляемого сенсора 12.
При установке на приборную панель ЭУУ 1, основание 3 джойстика 2 герметизируют любым известным способом, например, путем прокладки резинового уплотнения между основанием 3 и поверхностью приборной панели 1 ЭУУ.
Пример осуществления №26 (фиг. 25)
Конструкция повторяет конструкцию, описанную в примере осуществления №25 (по изобретению), но, в отличие от конструкции по примеру осуществления №25, магнитоуправляемый сенсор 12, размещенный в основании 3, смонтирован на печатной плате 20, установленной в нижней части основания 3.
Пример осуществления №27 (фиг. 26)
Конструкция повторяет конструкцию, описанную в примере осуществления №25 (по изобретению), но, в отличие от конструкции по примеру осуществления №25, магнитоуправляемый сенсор 12, размещенный в основании 3, установлен со стороны выпуклой поверхности постоянного магнита 10.
Пример осуществления №28 (фиг. 27)
Конструкция повторяет конструкцию, описанную в примере осуществления №27 (по изобретению), но, в отличие от конструкции по примеру осуществления №27, магнитоуправляемый сенсор 12, размещенный в основании 3, установлен со стороны выпуклой поверхности постоянного магнита 10, на печатной плате 20.
Устройство согласно примерам осуществления №25-№28 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №18-№21 (по изобретению).
Пример осуществления №29 (фиг. 28)
Конструкция повторяет конструкцию, описанную в примере осуществления №25 (по изобретению), но, в отличие от конструкции по примеру осуществления №25, джойстик 2 одноосевой пропорциональный дополнительно содержит пружинный элемент 7, представляющий собой пружину кручения. Пружинные элементы 6, установлены в симметрично расположенных полостях 14, 15 выполненных с боковых сторон нижней части рукоятки 4. В нижней части каждой из полостей 14, 15 выполнен сквозной вырез для вывода опорных концов пружинных элементов 6, 7.
Устройство согласно примеру осуществления №29 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примера №17 (по изобретению), но, в отличие от описания в динамике для примеров осуществления №17, при наклоне рукоятки 4 от нейтрального положения, выход полости 14 смещается относительно выреза 16, нажимая на один из опорных концов пружинного элемента 6. Одновременно с этим выход полости 15 смещается относительно выреза 17, нажимая на один из опорных концов пружинного элемента 7. При наклоне рукоятки 4 в противоположном направлении от нейтрального положения, рукоятка 4 нажимает на другие опорные концы пружинных элементов 6 и 7.
Пример осуществления №30 (фиг. 29)
Конструкция повторяет конструкцию, описанную в примере осуществления №25 (по изобретению), но, в отличие от конструкции по примеру осуществления №25, магнитоуправляемый сенсор 12 размещен вне джойстика, в составе ЭУУ, и закреплен с внутренней стороны приборной панели 1 ЭУУ любым известным способом, например, с помощью клея. При этом магнитоуправляемый сенсор 12 размещен со стороны выпуклой поверхности постоянного магнита 10. Провода, связанные с магнитоуправляемым сенсором 12, непосредственно соединены с электронной частью ЭУУ для последующей обработки сигнала от магнитоуправляемого сенсора 12.
При установке на приборную панель 1 ЭУУ, джойстик 2 не требует герметизации, так как не содержит электронных элементов.
Пример осуществления №31 (фиг. 30)
Конструкция повторяет конструкцию, описанную в примере осуществления №30 (по изобретению), но, в отличие от конструкции по примеру осуществления №30, магнитоуправляемый сенсор 12, входящий в состав ЭУУ, смонтирован на печатной плате 20, установленной с внутренней стороны приборной панели 1 ЭУУ, и, аналогично примеру осуществления №30 (по изобретению), магнитоуправляемый сенсор 12 размещен со стороны выпуклой поверхности постоянного магнита 10. Печатная плата 20 с магнитоуправляемым сенсором 12, соединена с электронной частью ЭУУ для последующей обработки сигнала от магнитоуправляемого сенсора 12, либо печатная плата 20 является продолжением электронной платы ЭУУ в которой выполняется обработка сигнала от магнитоуправляемого сенсора 12.
При установке на приборную панель ЭУУ 1, джойстик 2 не требует герметизации, так как не содержит электронных элементов.
Устройство согласно примерам осуществления №30, №31 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №22, №23 (по изобретению).
Пример осуществления №32 (фиг. 31)
Конструкция повторяет конструкцию, описанную в примере осуществления №25 (по изобретению), но, в отличие от конструкции по примеру осуществления №25, джойстик одноосевой пропорциональный содержит дополнительную взаимодействующую пару - магнитоуправляемый сенсор и постоянный магнит. Второй магнитоуправляемый сенсор 13, размещен в основании 3, с противоположной от стороны расположения магнитоуправляемого сенсора 12. Второй постоянный магнит 11 установлен в полость 19 рукоятки 4, выполненную с противоположной стороны полуцилиндрической части рукоятки 4.
Устройство согласно примеру осуществления №32 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примера №25-№28 (по изобретению), но в случае отказа магнитоуправляемого сенсора 12, ЭУУ обработает сигнал от магнитоуправляемого сенсора 13, который составляет дублирующую пару с постоянным магнитом 11. Постоянный магнит 11 движется параллельно и одновременно с постоянным магнитом 10, при этом магнитоуправляемый сенсор 13 отслеживает вращение рукоятки 4 аналогично принципу работы, описанному в динамике для примеров №1-№4 (по изобретению).
Пример осуществления №33 (фиг. 32)
Конструкция повторяет конструкцию, описанную в примере осуществления №25 (по изобретению), но, в отличие от конструкции по примеру осуществления №25, шипы шарнира 5, расположены с внутренней стороны полукруглых стенок верхней части основания 3 и выполнены единой деталью с основанием 3, а с боковых сторон нижней полуцилиндрической части рукоятки 4 расположены гнезда для установки шипов шарнира 5.
Устройство согласно примеру осуществления №33 работает следующим образом. Принцип работы конструкции, повторяет описание в динамике для примеров №25-№28 (по изобретению).
Сопоставительный анализ с ближайшим аналогом показывает, что заявляемое устройство отличается от прототипа следующим:
1. Постоянный магнит установлен непосредственно в рукоятку, без дополнительной промежуточной детали, испытывающей нагрузку. Это исключает возникновение люфта между рукояткой и постоянным магнитом и способствует сохранению точности выходного сигнала в процессе эксплуатации джойстика.
2. Постоянный магнит выполнен в форме объемного кольцевого сектора с постоянным поперечным сечением, с диаметральной намагниченностью вдоль его боковых поверхностей таким образом, что торцевые поверхности являются магнитными полюсами.
3. В конструкции джойстика постоянный магнит смещен от оси вращения рукоятки, что обеспечивает возможность движения постоянного магнита, передаваемого от рукоятки, по траектории в виде дуги окружности. Форма магнита и соответствующая ей траектория движения соотносятся с поступательным движением «развернутого» (имеющего форму параллелепипеда) магнита, относительно неподвижного сенсора. В том и в другом случаях обеспечивается широкий диапазон изменения и линейность сигнала на выходе магнитоуправляемого сенсора, но, при этом, вариант постоянного магнита в форме кольцевого сектора, по сравнению с «развернутым» магнитом, обеспечивает конструкции значительное сокращение габаритных размеров. Описанное решение позволяет получить линейность зависимости электрического сигнала на выходе сенсора от угла наклона рукоятки, пропорциональность управления и необходимую точность определения угла наклона рукоятки.
4. Перемещение магнитоуправляемого сенсора по отношению к постоянному магниту «от полюса к полюсу» по дуге окружности позволяет обеспечить максимальный диапазон линейной характеристики изменения сигнала на выходе магнитоуправляемого сенсора в диапазоне углов наклона рукоятки джойстика.
5. Не требуется высокой точности взаимного расположения постоянного магнита и магнитоуправляемого сенсора, так как отсутствует необходимость размещения их на одной оси.
6. Для обеспечения работоспособности и надежности предлагаемой конструкции джойстика достаточно одного пружинного элемента.
Сопоставительный анализ с приведенными аналогами выявляет следующие улучшения эксплуатационных свойств предлагаемого технического решения:
1. Наличие пружинного элемента обеспечивает безопасность работы устройства.
В машинах, например, в кране, принято, что максимальному углу наклона рукоятки соответствует максимальная скорость выполнения операции исполнительным механизмом, а минимальному углу - минимальная скорость. Также из опыта эксплуатации машин известно, что точное и плавное управление выполнением операции требуется на «малых» скоростях исполнительных механизмов и абсолютно неэффективно на «больших» скоростях. Из практического опыта известно, что точность движений рук оператора больше при небольших нагрузках. Поэтому, при увеличении скорости выполнения операции должно увеличиваться и возвратное сопротивление рукоятки, а также при положениях рукоятки соответствующих «малым» скоростям должно быть минимальное возвратное сопротивление и отсутствие скачкообразного изменения возвратного сопротивления.
В заявленной конструкции по мере увеличения угла наклона рукоятки относительно нейтрального положения возвратное сопротивление рукоятки возрастает за счет пружины. При малых углах наклона рукоятки относительно нейтрального положения возвратное сопротивление минимально, что позволяет плавно и точно управлять рукояткой.
В заявленной конструкции возвратное сопротивление рукоятки является максимальным в крайних положениях рукоятки относительно нейтрального.
Таким образом, заявленная конструкция надежно обеспечит возврат рукоятки в нейтральное положение при отсутствии воздействия на нее оператора, что соответствует требованиям безопасности, предъявляемым к органам управления физическими объектами, например, краном.
2. Наличие цилиндрического шарнира обеспечивает надежное соединение рукоятки и основания джойстика, предотвращает самопроизвольное рассоединение узла вращения рукоятки.
3. Форма постоянного магнита, его расположение в конструкции с возможностью движения по траектории в виде дуги окружности относительно неподвижного магнитоуправляемого сенсора обеспечивают максимальный диапазон изменения сигнала на выходе магнитоуправляемого сенсора, что обеспечивает повышение разрешающей способности пропорционального регулирования и уменьшению влияния изменения температуры окружающей среды на относительное изменение выходного сигнала магнитоуправляемого сенсора.
4. Отсутствие в конструкции постоянных магнитов применяемых в качестве силовых элементов, испытывающих нагрузку, в том числе силу трения, повышает эксплуатационную надежность.
5. Отсутствие между рукояткой и постоянным магнитом промежуточной детали, испытывающей нагрузку, способствует сохранению точности выходного сигнала в процессе эксплуатации джойстика.
6. Упрощение конструкции заявленного устройства достигается за счет того, что постоянный магнит установлен в рукоятке и отсутствуют дополнительные промежуточные детали между основанием и рукояткой, кроме цилиндрического шарнира; отсутствует промежуточная деталь между рукояткой и магнитом, а также для обеспечения работоспособности и надежности предлагаемого устройства достаточно применения одного пружинного элемента.
Вышеизложенное позволяет сделать вывод о том, что заявляемая совокупность признаков характеризует новое техническое решение, ранее не известное и явным образом не следующее из уровня техники, а следовательно, заявленное изобретение соответствует критериям «новизна» и «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ ЭЛЕКТРОННЫЙ ДЖОЙСТИК С БЕСКОНТАКТНЫМ ДАТЧИКОМ | 2024 |
|
RU2827681C1 |
| МОДУЛЬ ЭЛЕКТРОННОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ НА СЕНСОРАХ ХОЛЛА | 2006 |
|
RU2334267C2 |
| Устройство ввода команд для системы управления экскаватором | 2023 |
|
RU2809499C1 |
| Устройство для управления | 2020 |
|
RU2730081C1 |
| УКАЗАТЕЛЬ ПОВОРОТА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2021924C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ИНОРОДНОГО ТЕЛА ВНУТРИ ПАЦИЕНТА ВНЕШНИМ МАГНИТНЫМ ПОЛЕМ | 2017 |
|
RU2667880C1 |
| УСТРОЙСТВО РУЧНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ-ТРИПОДОМ | 2011 |
|
RU2501648C2 |
| КОМПЛЕКТ ДЛЯ ДЕМОНСТРАЦИИ ЗАКОНОВ МЕХАНИКИ (ВАРИАНТЫ), МАГНИТНЫЙ ГЕРКОНОВЫЙ ДАТЧИК И ПРИСПОСОБЛЕНИЕ ДЛЯ ОПРЕДЕЛЕНИЯ МГНОВЕННОЙ СКОРОСТИ ТЕЛА, БРОШЕННОГО ГОРИЗОНТАЛЬНО | 2011 |
|
RU2460146C1 |
| ТРЕНАЖЕР ДЛЯ ОБУЧЕНИЯ ПРИЕМАМ ЭКСТРЕННОЙ ТРАВМАТОЛОГИЧЕСКОЙ И РЕАНИМАЦИОННОЙ ПОМОЩИ | 1993 |
|
RU2124762C1 |
| ПРИБОР ДЛЯ ИЗУЧЕНИЯ ЗАКОНОВ МЕХАНИКИ | 2011 |
|
RU2473974C1 |
Изобретение относится к джойстикам, основанным на применении магнитоуправляемого сенсора, и предназначено для точного управления перемещением исполнительных механизмов в машиностроении. Джойстик одноосевой пропорциональный содержит основание, рукоятку, установленную на основание посредством цилиндрического шарнира, состоящего из полуцилиндрической верхней части основания, шарнирной вилки нижней части рукоятки и штифта, закрепленного между ними. Пружинный элемент, представляющий собой пружину кручения, установлен на штифт в полости верхней части основания с выводом опорных концов в рукоятку. Магнитоуправляемый сенсор размещен в основании, в зоне магнитного поля двухполюсного постоянного магнита, размещенного в рукоятке, имеющего диаметральную намагниченность вдоль его боковых поверхностей и выполненного в форме объемного кольцевого сектора с постоянным поперечным сечением по всей длине. Техническим результатом заявляемого изобретения является повышение точности регулирования выходного сигнала и сохранение ее в процессе эксплуатации, получение линейной характеристики выходного сигнала, упрощение конструкции. 4 з.п. ф-лы, 32 ил.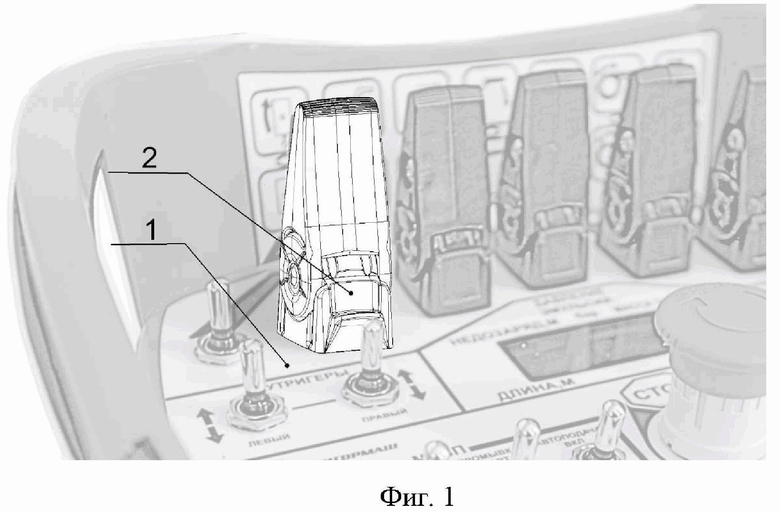
1. Джойстик одноосевой пропорциональный, содержащий основание, рукоятку, соединенную с основанием с возможностью вращательного движения, по меньшей мере один двухполюсный постоянный магнит, по меньшей мере один магнитоуправляемый сенсор, размещенный неподвижно относительно основания в зоне магнитного поля постоянного магнита, по меньшей мере один пружинный элемент, отличающийся тем, что рукоятка соединена с основанием посредством одноосевого цилиндрического шарнира, причем основание и рукоятка опираются на опорные концы по меньшей мере одного пружинного элемента, при этом постоянный магнит выполнен в форме объемного кольцевого сектора с постоянным поперечным сечением, с диаметральной намагниченностью вдоль его боковых поверхностей таким образом, что торцевые поверхности являются магнитными полюсами, при этом постоянный магнит неподвижно связан с рукояткой с возможностью движения, передаваемого от рукоятки, по траектории в виде дуги окружности, центр которой лежит на оси вращения рукоятки, а его вогнутая поверхность обращена к шарниру, при этом движение постоянного магнита обеспечивает изменение положения магнитоуправляемого сенсора в магнитном поле от одного полюса к другому.
2. Джойстик одноосевой пропорциональный по п.1, отличающийся тем, что магнитоуправляемый сенсор размещен в основании.
3. Джойстик одноосевой пропорциональный по пп.1, 2, отличающийся тем, что магнитоуправляемый сенсор размещен в полости основания со стороны боковой поверхности постоянного магнита.
4. Джойстик одноосевой пропорциональный по пп.1, 2, отличающийся тем, что магнитоуправляемый сенсор размещен в полости основания со стороны выпуклой поверхности постоянного магнита.
5. Джойстик одноосевой пропорциональный по п.1, отличающийся тем, что магнитоуправляемый сенсор размещен снаружи джойстика в составе электронного устройства управления, на которое установлен джойстик, со стороны выпуклой поверхности постоянного магнита.
| US 4500867 A, 19.02.1985 | |||
| БОКС ДЛЯ ЗАГОТОВКИ КРОВИ | 0 |
|
SU171081A1 |
| US 2007262959 A1, 15.11.2007 | |||
| US 6353430 B2, 05.03.2002. | |||

