Изобретение относится к судостроению, в частности к устройствам, входящим в состав системы дистанционного управления судовыми двигателями.
Известна «Морская полностью вращающаяся рукоятка управления» (пат. № CN 211167360 U опубл. 04.08.2020 г.) обеспечивающая морскую ручку управления полным вращением, которая включает в себя основание, рабочую ручку, кожух и передаточный механизм, расположенный в кожухе. Ручка управления и кожух расположены над основанием, а рукоятка управления расположена с двух сторон кожуха. На верхней панели основания расположена подвижная шкала. Механизм трансмиссии содержит ведущий вал, ведущие зубья, ведомые зубья ведомый вал, крепежную раму ведомого вала и кулачок. При этом ведущий вал соединен с вращающимся валом рабочей рукоятки, ведущие зубья расположены на ведущем валу, а ведущие зубья входят в зацепление с ведомыми зубьями; ведомая шестерня установлена на ведомом валу, а ведомый вал соединен с крепежной рамой ведомого вала; рама крепления ведомого вала имеет первую, вторую и третью канавки; кулачок закреплен на внутренней стенке корпуса и соответствует положению рамы крепления ведомого вала. К недостаткам устройства можно отнести большие габаритные размеры.
Известна «Рукоятка управления движением с полным вращением» (пат. № CN 212099313 U опубл. 08.12.2020 г.), которая содержит монтажное основание, коробка передач неподвижно установлена в нижней части монтажного основания, ограничительный датчик подвижно соединен с монтажным основанием, соединительный главный вал соединен с монтажным основанием, ограничительный зонд, а игольчатая головка неподвижно установлена на одной стороне ограничительного зонда. Одна сторона ограничительного зонда снабжена поворотным блокирующим элементом, установленным с возможностью вращения на установочном основании, поворотный блокирующий элемент совмещен с игольчатой головкой, нижняя часть соединительного главного вала проходит в коробку передач, верхняя часть соединительного главного вала проходит в положение над установочным основанием, а в верхней части соединительного главного вала установлен ролик. В соответствии с рукояткой полного поворота, вращение на 360 градусов между 180 градусами и 0 градусами и 180 градусами может быть достигнуто, когда блокирующая вращение деталь установлена в наконечнике. К недостаткам устройства можно отнести большие габаритные размеры.
Известна «Морская полностью вращающаяся рукоятка управления» (пат. № CN 102390514 А опубл. 28.03.2012 г.), которая объединяет управление движением судна и управление по азимуту и может непрерывно вращаться на 360 градусов в окружном направлении для работы. В морской полностью вращающейся ручке управления рама образована панелью, монтажной пластиной зубчатого устройства, монтажной пластиной цифрового кодирующего устройства и нижней пластиной, которые расположены с интервалами сверху вниз; и компонентами ручки, главного механизма управления скоростью, ведомого устройства управления скоростью шестерня, устройство нулевого положения, потенциометр, зубчатое устройство, цифровой кодер, токопроводящее контактное кольцо и тому подобное расположены в раме. Рукоятку тянут и толкают взад и вперед, чтобы реализовать изменение скорости движения судна и направления продвижения или удаления, а именно изменение состояния продольного движения судна; и рукоятку поворачивают в окружном направлении, чтобы реализовать изменение азимутального угла модуля, а именно изменение состояния рулевого движения судна. К недостаткам можно отнести большие габаритные размеры устройства, занимающего большой объем внутрипультового пространства.
Наиболее близким к предлагаемому техническому решению является «Судовая ручка управления» (пат. RU №212499 U1 опубл. 26.07.2022 г.) к особенностям конструкции которой относится компоновка механизмов в верхней части корпуса ручки над рабочей панелью пульта управления. Судовая ручка управления, включающая в себя шкалу угла поворота, шкалу скорости движения, втулку, главную передачу управления скоростью, вал управления скоростью, фиксатор нуля, опорное основание, панель, ведомый механизм управления скоростью, потенциометр, крепежную панель потенциометра, вал управления азимутом, соединительную стойку, фиксирующее устройство, первую шестерню управления азимутом, вторую шестерню управления азимутом, вторую соединительную стойку, проводящее контактное кольцо, цифровой кодер, нижнюю пластину, клемму, пару эксцентриковых колес, провод потенциометра, при этом главная передача управления скоростью, вал управления скоростью, потенциометр расположены внутри корпуса судовой ручки управления, вал управления азимутом имеет опору скольжения с резиновым кольцом, фиксирующее устройство расположено непосредственно под панелью.
Недостатком устройства-прототипа является отсутствие встроенного шагового двигателя, работающего в микрошаговом режиме.
Основной задачей данного технического решения является создание устройства, обладающего компактными массогабаритными характеристиками, которое с повышенной точностью позиционирует рычаг ручки дистанционного управления главным судовым двигателем относительно шкалы положения топливной рейки за счет шагового двигателя и служит индикатором заданного режима работы главного судового двигателя (вперед: самый малый, малый, средний, полный; стоп; назад: самый малый, малый, средний, полный) при дистанционном управлении.
Техническим результатом изобретения является повышение точности позиционирования рычага ручки дистанционного управления главным судовым двигателем за счет дополнительно встроенного шагового двигателя, работающего в микрошаговом режиме.
Для решения указанной задачи ручка дистанционного управления главным судовым двигателем включает в себя шкалу положения топливной рейки, вал управления рычагом, потенциометр, фиксирующее устройство, первую шестерню и вторую шестерню вала управления рычагом, причем вал управления рычагом и потенциометр расположены внутри корпуса ручки дистанционного управления главным судовым двигателем.
Принципиальным отличием от прототипа является то, что дополнительно в корпус встроен шаговый двигатель, шестерня которого сцеплена с первой шестерней вала управления рычагом, а вторая шестерня вала управления рычагом сцеплена с шестерней потенциометра, который устанавливается таким образом, что при любом возможном положении рычага скользящий контакт потенциометра не проходит через ноль.
Заявленное изобретение иллюстрируется чертежами.
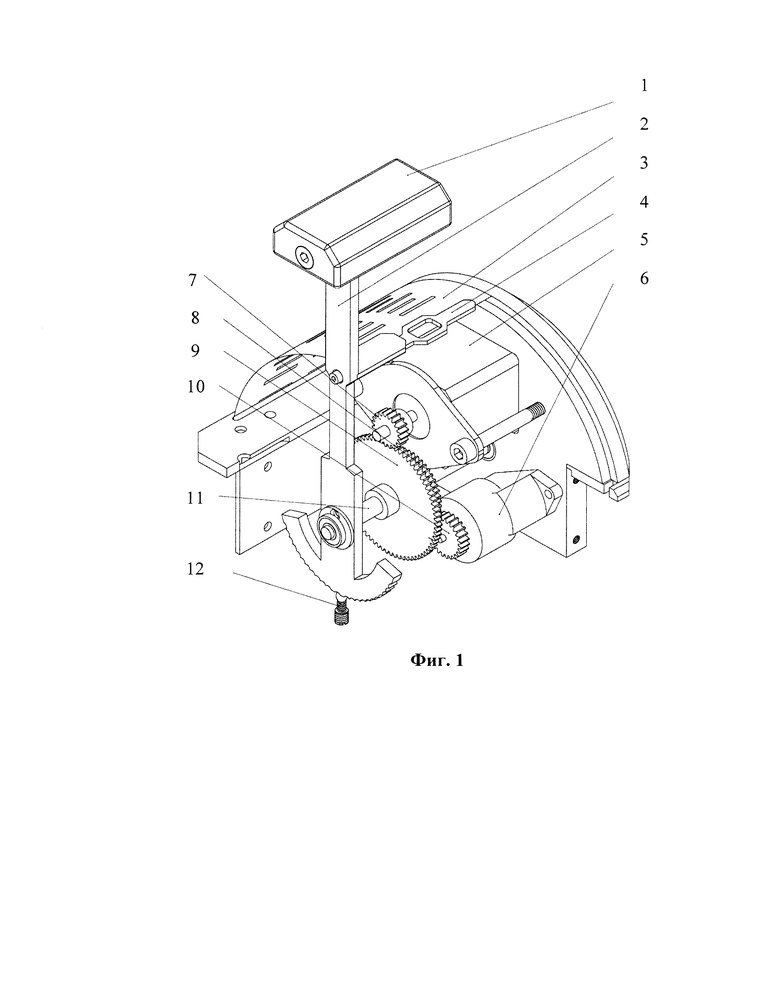
На фиг. 1 приведен сборочный чертеж ручки дистанционного управления главным судовым двигателем (далее ручка).
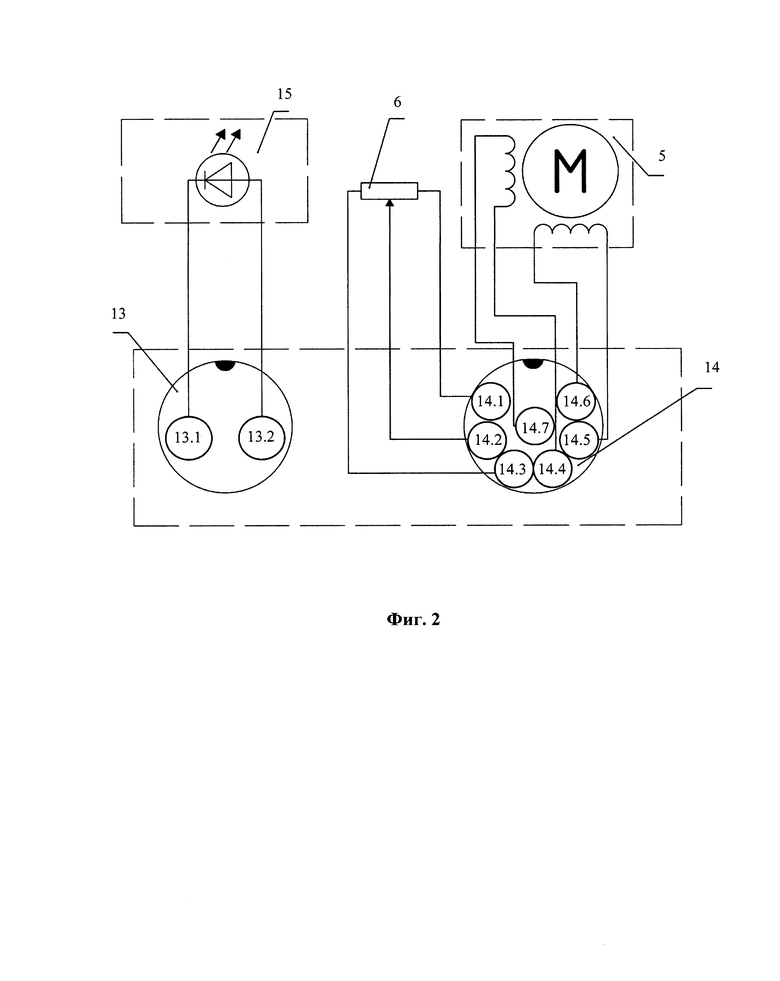
На фиг. 2 представлена электрическая схема подключения ручки.
Фиг. 1 содержит следующие элементы:
1. Рукоятка.
2. Рычаг.
3. Шкала положения топливной рейки.
4. Указатель положения.
5. Шаговый двигатель.
6. Потенциометр.
7. Шестерня шагового двигателя.
8. Первая шестерня вала управления рычагом.
9. Вторая шестерня вала управления рычагом.
10. Шестерня потенциометра.
11. Вал управления рычагом.
12. Фиксирующее устройство.
Как показано на фиг. 1 конструкция устройства включает в себя вал управления рычагом 11, который жестко связан с рычагом 2, при этом ось вращения вала является осью вращения рычага 2. Первая шестерня вала управления рычагом 8 и вторая шестерня вала управления рычагом 9 находятся на валу управления рычагом 11, соосны и жестко связаны с ним. Шестерня шагового двигателя 7 может выступать в качестве ведущей и в качестве ведомой.
В случае, когда рычаг 2 перемещается под воздействием внешних сил, а шаговый двигатель 5 обесточен, первая и вторая шестерни вала управления рычагом 8 и 9 являются ведущими, а шестерня потенциометра 10 и шестерня шагового двигателя 7 - ведомыми.
В случае, когда момент силы на валу шагового двигателя 5 превышает момент силы сопротивления системы, шестерня шагового двигателя 7 является ведущей, а первая шестерня вала управления рычагом 8 - ведомой.
Фиксирующее устройство 12 позволяет приводить рычаг 2 в фиксированные положения. Все элементы ручки закреплены болтовыми соединениями
Фиг. 2 содержит следующие элементы:
13. Разъем подсветки:
13.1. Узел цепи, потенциал которого условно принимается за ноль (GND).
13.2. Напряжение +24 V.
14. Разъем потенциометра и шагового двигателя:
14.1. Минусовой контакт потенциометра.
14.2. Подвижный контакт потенциометра.
14.3. Плюсовой контакт потенциометра.
14.4. Первый плюсовой контакт шагового двигателя.
14.5. Второй минусовой контакт шагового двигателя.
14.6. Второй плюсовой контакт шагового двигателя.
14.7. Первый минусовый контакт шагового двигателя.
15. Светодиодная лента.
Электропитание ручки осуществляется напряжением 24 В от судовой сети постоянного тока. В ручке предусмотрена подсветка шкалы положения топливной рейки с плавным регулированием яркости путем изменения приложенного напряжения в диапазоне 0-24 В. На фиг. 2 указано соответствие выводов встроенного шагового двигателя 5 обмоткам. Максимальный ток на фазу составляет - 1.7 А.
Ручка дистанционного управления главным судовым двигателем расположена на пульте управления судна и работает в двух режимах - неактивный и активный. В неактивном режиме ручка точно позиционирует рычаг, используя встроенный шаговый двигатель, и служит индикатором заданного режима работы главного судового двигателя (вперед: самый малый, малый, средний, полный; стоп; назад: самый малый, малый, средний, полный) при дистанционном управлении. В активном режиме ручка позволяет снять сигнал позиционирования рычага, несущий информацию о положении топливной рейки, для последующей записи полученных данных в память системы управления главным судовым двигателем.
Конструкция изобретения предполагает, что потенциометр устанавливается таким образом, что при любом возможном положении рычага скользящий контакт потенциометра не проходит через ноль. Это ограничение позволяет упростить калибровку, которая включает в себя процедуру сравнения электрического сигнала потенциометра с физическим положением рычага относительно шкалы положения топливной рейки.
Устройство работает следующим образом
В активном режиме оператор вручную перемещает рычаг 2 ручки вдоль шкалы положения топливной рейки 3 до необходимой отметки, обозначенной указателем положения 4 (см. фиг. 1). Вращение через ось потенциометра 6 передается на шестерню потенциометра 10, которая перемещает его скользящий контакт синхронно с рычагом 2 на угол, пропорциональный положению рычага 2, что позволяет снять электрический сигнал с потенциометра 6. Далее сигнал, содержащий информацию о положении топливной рейки, передается на внешнее устройство, подключенное к выводам 14.1, 14.2, 14.3 потенциометра 6 в соответствии со схемой, приведенной на фиг. 2, которое записывает сигнал в память системы управления главным судовым двигателем для дальнейшей обработки.
В неактивном режиме ручка служит индикатором заданного режима работы главного судового двигателя (вперед: самый малый, малый, средний, полный; стоп; назад: самый малый, малый, средний, полный) при дистанционном управлении. Для чего положение рычага 2 задается извне при помощи встроенного шагового двигателя 5 (см. фиг. 1).
При передаче управления с одного поста на другой на шаговый двигатель 5 приходит сигнал от системы управления главным судовым двигателем. Шаговый двигатель 5 движением своего вала, через шестерню шагового двигателя 7, сцепленную с первой шестерней вала управления рычагом 8 передает вращение на вал управления рычагом 11 и перемещает рычаг 2 на необходимый режим работы главного судового двигателя.
Поскольку положение скользящего контакта потенциометра 6 пропорционально положению рычага 2, сигнал с потенциометра 6 используется для контроля положения рычага 2 в качестве обратной связи, обеспечивающей точность его позиционирования.
Техническим результатом изобретения является повышение точности позиционирования рычага ручки дистанционного управления главным судовым двигателем за счет дополнительно встроенного шагового двигателя, работающего в микрошаговом режиме.
Устройство промышленно применимо, так как для его реализации используются распространенные ЭРИ и материалы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство ввода команд для системы управления винторулевой колонкой судна | 2023 |
|
RU2800615C1 |
| Устройство ввода команд для системы управления подруливающим устройством | 2023 |
|
RU2802096C1 |
| Дистанционное управление главной судовой паровой машиной | 1955 |
|
SU105884A1 |
| СУДОВОЙ БЛОК УПРАВЛЕНИЯ ЧАСТОТОЙ ВРАЩЕНИЯ И МОЩНОСТЬЮ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2023 |
|
RU2808732C1 |
| КРАЕОБМЕТОЧНАЯ ШВЕЙНАЯ МАШИНА | 2011 |
|
RU2493302C2 |
| РЕГУЛЯТОР РЕЖИМА РАБОТЫ СУДОВОГО ДИЗЕЛЯ С ДИСТАНЦИОННЫМ УПРАВЛЕНИЕМ | 1993 |
|
RU2044909C1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО | 1965 |
|
SU167403A1 |
| Система управления реверсированием двигателя внутреннего сгорания | 1965 |
|
SU518156A3 |
| Автоматический центр распила | 2017 |
|
RU2668314C1 |
| МЕХАНИЗМ ТРАНСПОРТИРОВАНИЯ ТКАНИ ШВЕЙНОЙ МАШИНЫ | 2012 |
|
RU2507326C2 |
Изобретение относится к судостроению, в частности к устройствам, входящим в состав системы дистанционного управления судовыми двигателями. Ручка дистанционного управления главным судовым двигателем, включает в себя шкалу положения топливной рейки, вал управления рычагом, потенциометр, фиксирующее устройство, первую шестерню и вторую шестерню вала управления рычагом, причем вал управления рычагом и потенциометр расположены внутри корпуса ручки дистанционного управления главным судовым двигателем. Принципиальным отличием от прототипа является то, что дополнительно в корпус встроен шаговый двигатель, шестерня которого сцеплена с первой шестерней вала управления рычагом, а вторая шестерня вала управления рычагом сцеплена с шестерней потенциометра, который устанавливается таким образом, что при любом возможном положении рычага скользящий контакт потенциометра не проходит через ноль. Техническим результатом изобретения является повышение точности позиционирования рычага ручки дистанционного управления главным судовым двигателем за счет дополнительно встроенного шагового двигателя, работающего в микрошаговом режиме. 2 ил.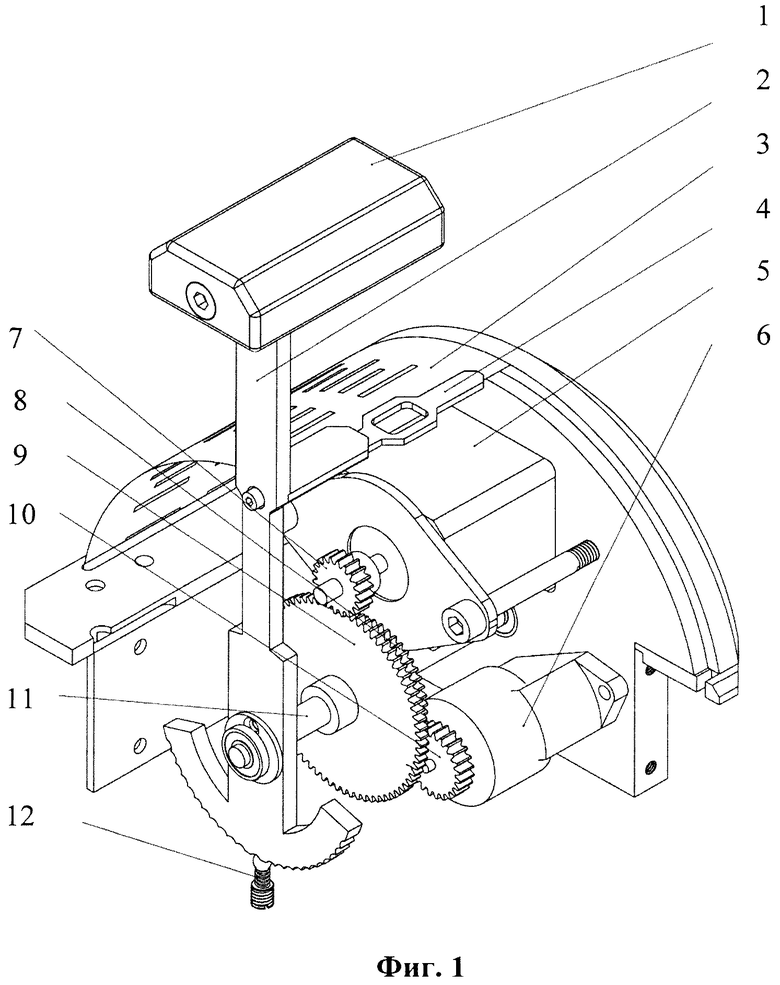
Ручка дистанционного управления главным судовым двигателем, включающая в себя шкалу положения топливной рейки, вал управления рычагом, потенциометр, фиксирующее устройство, первую шестерню и вторую шестерню вала управления рычагом, причем вал управления рычагом и потенциометр расположены внутри корпуса ручки дистанционного управления главным судовым двигателем, отличающаяся тем, что дополнительно в корпус встроен шаговый двигатель, шестерня которого сцеплена с первой шестерней вала управления рычагом, а вторая шестерня вала управления рычагом сцеплена с шестерней потенциометра, который устанавливается таким образом, что при любом возможном положении рычага скользящий контакт потенциометра не проходит через ноль.
| Включающее устройство | 1959 |
|
SU133506A1 |
| CN 212738477 U, 19.03.2021 | |||
| 0 |
|
SU212499A1 | |
| CN 211167360 U, 04.08.2020 | |||
| CN 104608899 B, 29.03.2017. | |||

