Изобретение относится к машиностроению, а именно к захватным устройствам промышленных роботов и манипуляторов для автоматизации технологических процессов поштучного сбора плодов.
Известен «Плодосборник» [Патент RU на изобретение № 2094975, МПК A01D 46/24, Баликоев Кирамин Керменович; Патентообладатель(и): Баликоев Кирамин Керменович; заявитель и патентообладатель: Баликоев Кирамин Керменович; заявл. 08.02.1993; опубл. 10.11.1997], который используется в сельском хозяйстве и предназначен для сбора плодов. Плодосборник содержит подвижный пустотелый корпус, имеющий загрузочное отверстие с режущими кромками и выгрузочное окно, плодосборник дополнительно снабжён наружным напорным корпусом, который имеет два выступа, неподвижный корпус имеет загрузочное отверстие с режущими кромками и выгрузочное окна, совпадающие с окнами подвижного корпуса.
Недостатком плодосборника является высокая трудоёмкость сбора плодов из-за низкого уровня автоматизации, что не позволяет его использовать на манипуляторе.
Наиболее близким техническим решением, выбранным в качестве прототипа, является «Устройство для уборки плодов с деревьев» [Патент RU на полезную модель № 181469, МПК A01D 46/24, Малахов Юрий Антонович (RU), Рытов Михаил Юрьевич (RU), Серпиченко Вячеслав Николаевич (RU), Помогаева Ксения Юрьевна (RU); заявитель и патентообладатель: Федеральное Государственное Бюджетное Образовательное Учреждение Высшего Образования "Брянский государственный технический университет" (RU); заявл. 30.01.2018; опубл. 16.07.2018, бюл. №20]. Устройство для уборки плодов с деревьев содержит установленный на телескопическом шесте захват, выполненный из пластмассы и имеющий прорези и отверстие. В верхней части захвата выполнены четыре прорези, расположенные по окружности через каждые 90°, а в нижней боковой стенке захвата имеется отверстие с выпуклой рамкой, на которую присоединен гофрированный хобот, имеющий на конце мягкие гибкие лепестки. При этом к гофрированному хоботу прикреплена штанга с хомутом, к которой присоединяется подпружиненная рамка с двумя ячейками, на которые надеваются мешки, шест имеет в нижней части упор для освобождения одной руки при эксплуатации. На ячейки надеваются мешки для сбора плодов.
С существенными признаками изобретения совпадает следующая совокупность признаков прототипа: установленный на телескопическом шесте захват, выполненный из пластмассы и имеющий отверстие, к которому присоединен гофрированный хобот, имеющий на конце мягкие гибкие лепестки.
Недостатком прототипа является высокая трудоемкость процесса сбора плодов из-за его низкого уровня автоматизации.
Изобретение направлено на снижение трудоёмкости процесса сбора плодов за счет его автоматизации.
Это достигается тем, что автоматизированное захватное устройство для сбора плодов, содержит установленный на телескопическом шесте захват, выполненный из пластмассы и имеющий в нижней части отверстие, к которому присоединен гофрированный хобот, имеющий на конце мягкие гибкие лепестки. Отличается тем, что захват выполнен в виде внешней и внутренней труб. Поверхность внутренней трубы выполнена в виде спиралевидного зубчатого профиля параллельного поверхности шарико-винтовой передачи, за счёт которой внешняя труба подвижно соединена с внутренней трубой. Внутренняя труба имеет на торце подпружиненные поворотные пальцы, равномерно распределённые по окружности. Каждый из пальцев представляет собой поворотный рычаг с закреплёнными на нем храповым колесом, поворотной мягкой губкой и роликом. Вращение храпового колеса в одну из сторон фиксируется подпружиненной собачкой. Ролик пальца опирается на коническую часть внешней трубы. На внешней стороне внешней трубы установлен двигатель, сопряжённый со спиралевидным зубчатым профилем внутренней трубы посредством установленного на нем ведущего зубчатого колеса.
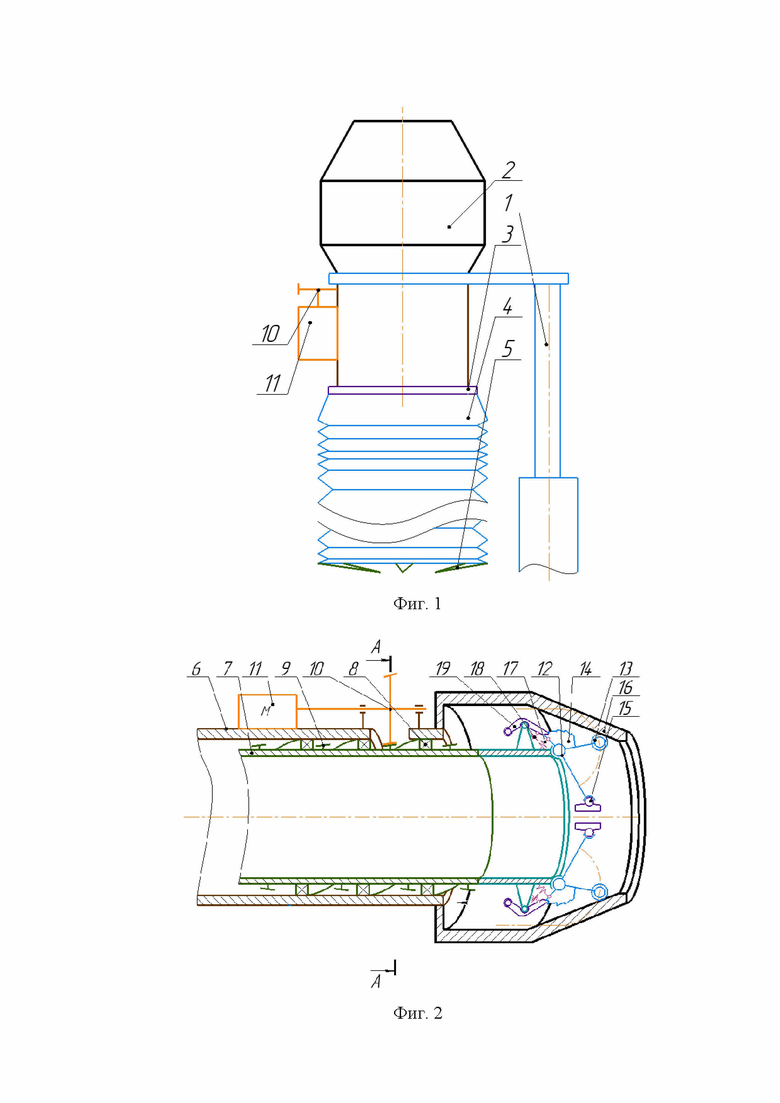
Сущность изобретения поясняется графическим материалом, где на фиг. 1 представлен общий вид автоматизированного захватного устройства для сбора плодов, на фиг. 2 - продольный разрез захвата, на фиг. 3 - разрез А-А на фиг. 2 (сопряжение ведущего зубчатого колеса и спиралевидного зубчатого профиля).
Автоматизированное захватное устройство для сбора плодов состоит из телескопического шеста 1, на котором установлен захват 2, выполненный из пластика. В нижней части захвата 2 имеется отверстие с выпуклой рамкой 3, к которой присоединён гофрированный хобот 4. На конце гофрированного хобота 4 выполнены мягкие гибкие лепестки 5 (фиг. 1).
Захват 2 выполнен в виде внешней 6 и внутренней 7 труб (фиг. 2). При этом внутренняя 7 труба подвижно соединена с внешней 6 трубой, например, посредством шарико-винтовой передачи 8. Поверхность внутренней 7 трубы выполнена в виде спиралевидного зубчатого профиля 9 параллельного поверхности шарико-винтовой передачи 8, за счёт которой внешняя 6 труба подвижно соединена с внутренней 7 трубой. (фиг. 3). Спиралевидный зубчатый профиль 9 сопряжён с ведущим зубчатым колесом 10, которое установлено на валу двигателя 11. При этом ведущее зубчатое колесо 10 и двигатель 11 закреплены на внешней 6 трубе. На одном торце внутренней 7 трубы установлены подпружиненные пальцы 12, равномерно распределённые по окружности торца. Каждый палец 12 представляет собой поворотный рычаг с закреплёнными на нём роликом 13, храповым колесом 14 и поворотной мягкой губкой 15. Пальцы 12 сопряжены с конической частью 16 внешней 6 трубы посредством ролика 13. Ролик прижат к конической части 16 внешней 6 трубы пружиной 17. К храповому колесу 14 пружиной 18 прижата собачка 19, которая шарнирно закреплена на внутренней 7 трубе.
Автоматизированное захватное устройство для сбора плодов работает следующим образом. При помощи телескопического шеста 1 происходит перемещение захвата 2 таким образом, чтобы плод, например, яблоко оказалось внутри захвата 2. Для осуществления фиксации плода, происходит активация двигателя 11, который выкручивает внутреннюю 7 трубу из внешней 6 трубы посредством вращения ведущего зубчатого колесе 10 и сопряженного с ним спиралевидного зубчатого профиля 9, создавая вращательно-поступательное движение. Вращательно-поступательное движение происходит за счёт сопряжения внутренней 7 и внешней 6 труб посредством шарико-винтовой передачи 8. Пальцы 12, с установленными на них роликами 13, прижаты пружиной 17 к поверхности конусной части 16 внешней трубы 6. В результате перемещения ролика 13 по поверхности конусной части 16 происходит сжатие пальцев 12, которые фиксируют плод поворотными мягкими губками 15. Когда происходит фиксация плода, подается команда реверсивного движения двигателя 11, в результате которой фиксируемый пальцами 12 плод вращается и втягивается в полость внешней 6 трубы вместе с внутренней 7 трубой. При реверсивном движении разжатие пальцев 12 не происходит из-за фиксации их храповых колес 14 при помощи собачек 19. Прижатие собачки 19 к храповому колесу 14 происходит при помощи пружины 18. В крайнем полностью закрученном положении, когда внутренняя 7 труба полностью находится во внешней 6 трубе, собачка 19, упираясь в стенку конической части 19 внешней 6 трубы, поворачивается и освобождает храповое колесо 14. В результате чего, пальцы 12 под воздействием пружины 17 разжимаются и плод попадает в гофрированный хобот 4 присоединенный к выпуклой рамке 3, по которому скатывается до мягких гибких лепестков 5, которые его останавливают.
Выполнение захвата в виде внешней 6 и внутренней 7 труб, одна из которых вкручивается в другую за счёт шарико-винтовой передачи 8 и имеет на одном торце поворотные подпружиненные пальцы 12, которые упираясь в коническую часть 16 внешней 6 трубы роликами 13 при вращательно-поступательном перемещении (откручивании) внутренней трубы 7, сжимаются, а также не разжимаются при реверсивном движении из-за установки на каждом пальце 12 храпового колеса 14, а выполнение на поверхности внутренней 7 трубы спиралевидного зубчатого профиля 9, выполненного параллельно винтовой поверхности шарико-винтовой передачи 8 и сопряженного с двигателем 11, момент которого передается на спиралевидный зубчатый профиль 9 внутренней 7 трубы посредством установленного ведущего зубчатого колеса 10 на внешней 6 трубе, позволяет снизить трудоёмкость процесса сбора плодов за счет его автоматизации.
Помимо этого, автоматизированное захватное устройство для сбора плодов является важным элементом любой роботизированной системы, эксплуатируемой при сборе плодов, например, при сборе плодов где необходимо что бы захватное устройство самостоятельно производило отделение плода, а роботизированная система только осуществляла позиционирование захвата. Автоматизированное захватное устройство для сбора плодов может быть использовано не только для плодов сада, но и для ягод, так как является масштабируемым.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛОДОСЪЕМНИК | 1990 |
|
RU2011329C1 |
| Устройство для сборки | 1991 |
|
SU1757836A1 |
| ОЕОС-ОЗМАЯ .,|ПДТ1|;ТНО"Ил:;г;Е1;КДя|ВИБЛИОТЕКА | 1971 |
|
SU304214A1 |
| МЕХАНИЗМ УСТАНОВКИ И УДЕРЖАНИЯ КРЫШКИ КОНТЕЙНЕРА (ПЕНАЛА) С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ | 2011 |
|
RU2456691C1 |
| МЕХАНИЗМ УСТАНОВКИ И УДЕРЖАНИЯ КРЫШКИ ПЕНАЛА ХРАНЕНИЯ ОТРАБОТАВШЕГО ЯДЕРНОГО ТОПЛИВА | 2012 |
|
RU2518158C1 |
| ВИБРОБЕЗОПАСНАЯ ПНЕВМАТИЧЕСКАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 2005 |
|
RU2309038C2 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| УСТАНОВКА ДЛЯ ИЗМЕЛЬЧЕНИЯ ИЗНОШЕННЫХ ПОКРЫШЕК | 1993 |
|
RU2042510C1 |
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |
| Вакуумное грузозахватное устройство | 1985 |
|
SU1324980A1 |

Изобретение относится к области сельского хозяйства. Устройство для сбора плодов содержит установленный на телескопическом шесте (1) захват (2), выполненный из пластмассы и имеющий отверстие, к которому присоединен гофрированный хобот (4). Хобот (4) содержит на конце мягкие гибкие лепестки (5). Захват (2) выполнен в виде внешней (6) и внутренней (7) труб. Поверхность внутренней (7) трубы выполнена в виде спиралевидного зубчатого профиля (9), параллельного поверхности шарико-винтовой передачи (8), за счет которой внешняя (6) труба подвижно соединена с внутренней (7) трубой. Внутренняя труба (7) содержит на торце подпружиненные поворотные пальцы (12), равномерно распределенные по окружности. Каждый палец (12) представляет собой поворотный рычаг с закрепленными на нем храповым колесом (14), фиксируемым подпружиненной собачкой (19), поворотной мягкой губкой (15) и роликом (13), который опирается на коническую часть (16) внешней (6) трубы. На внешней (6) стороне трубы установлен двигатель (11), сопряженный со спиралевидным зубчатым профилем (9) внутренней (7) трубы посредством установленного на нем ведущего зубчатого колеса (10). Обеспечивается снижение трудоемкости процесса сбора плодов за счет его автоматизации. 3 ил.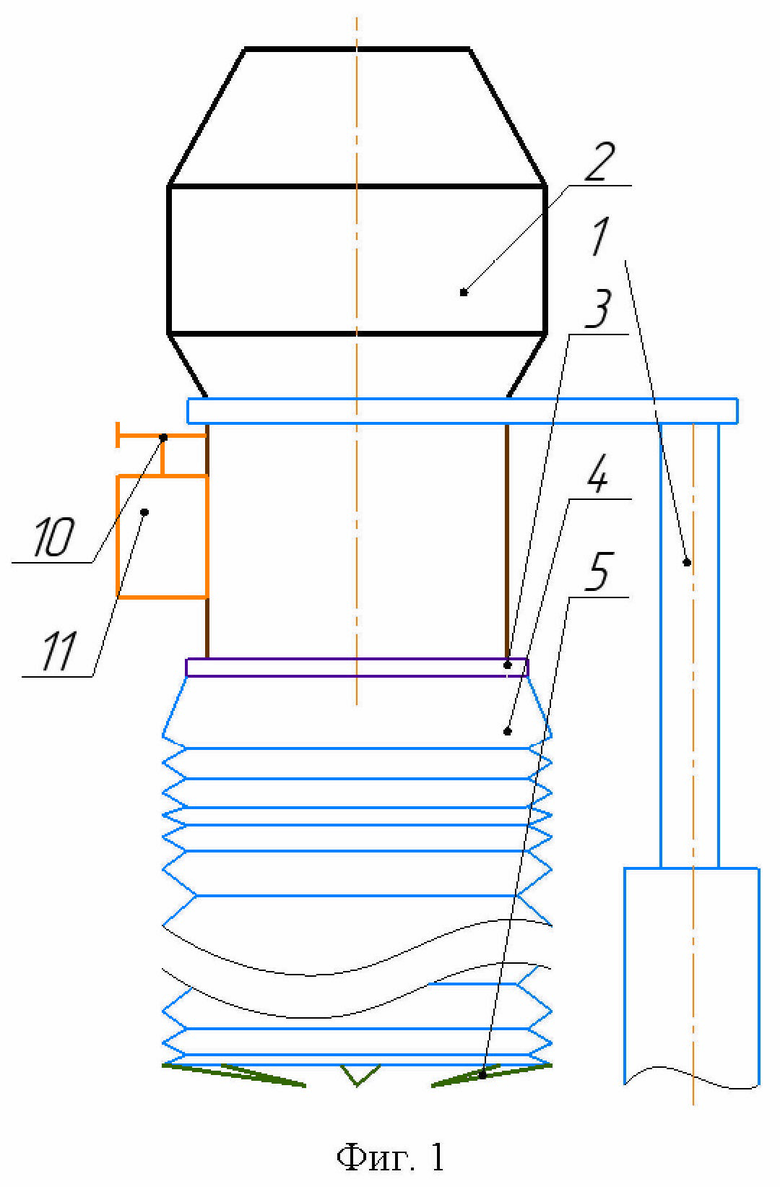
Автоматизированное захватное устройство для сбора плодов, содержащее установленный на телескопическом шесте захват, выполненный из пластмассы и имеющий отверстие, к которому присоединен гофрированный хобот, имеющий на конце мягкие гибкие лепестки, отличающееся тем, что захват выполнен в виде внешней и внутренней труб, при этом поверхность внутренней трубы выполнена в виде спиралевидного зубчатого профиля, параллельного поверхности шарико-винтовой передачи, за счет которой внешняя труба подвижно соединена с внутренней трубой, имеющей на торце подпружиненные поворотные пальцы, равномерно распределенные по окружности, каждый из которых представляет собой поворотный рычаг с закрепленными на нем храповым колесом, фиксируемым подпружиненной собачкой, поворотной мягкой губкой и роликом, который опирается на коническую часть внешней трубы, на внешней стороне которой установлен двигатель, сопряженный со спиралевидным зубчатым профилем внутренней трубы посредством установленного на нем ведущего зубчатого колеса.
| 0 |
|
SU181469A1 | |
| Устройство для отделения плодов | 1981 |
|
SU965386A1 |
| CN 208242276 U, 18.12.2018 | |||
| CN 105432236 A, 30.03.2016. | |||

