Изобретение относится к грузоподъемной технике, в частности к устройствам для захвата и перемещения грузов с такелажными петлями.
Цепь изобретения - повышение надежности работы грузозахватного устройства.
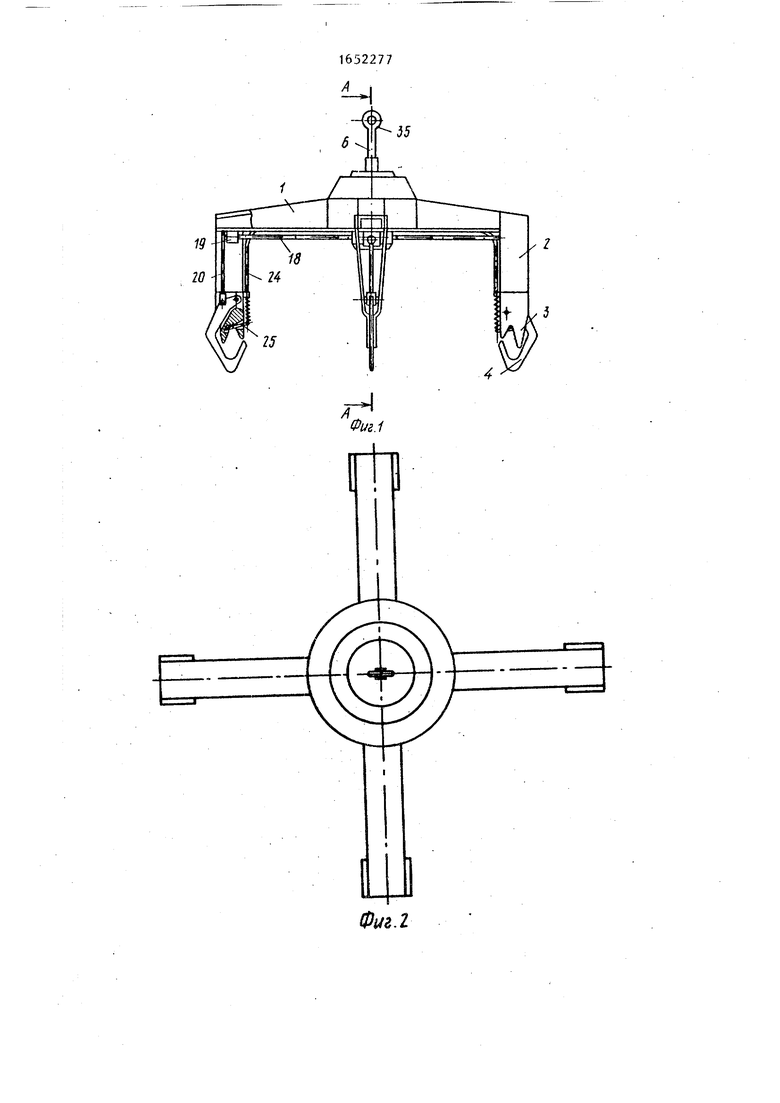
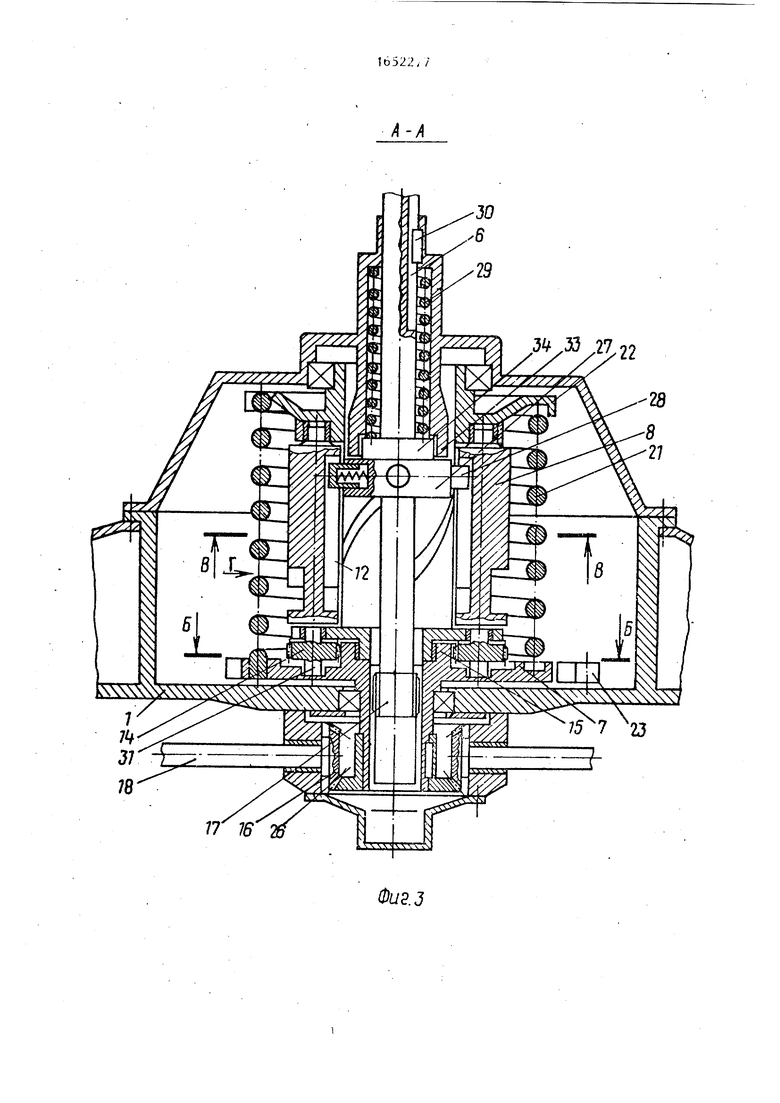
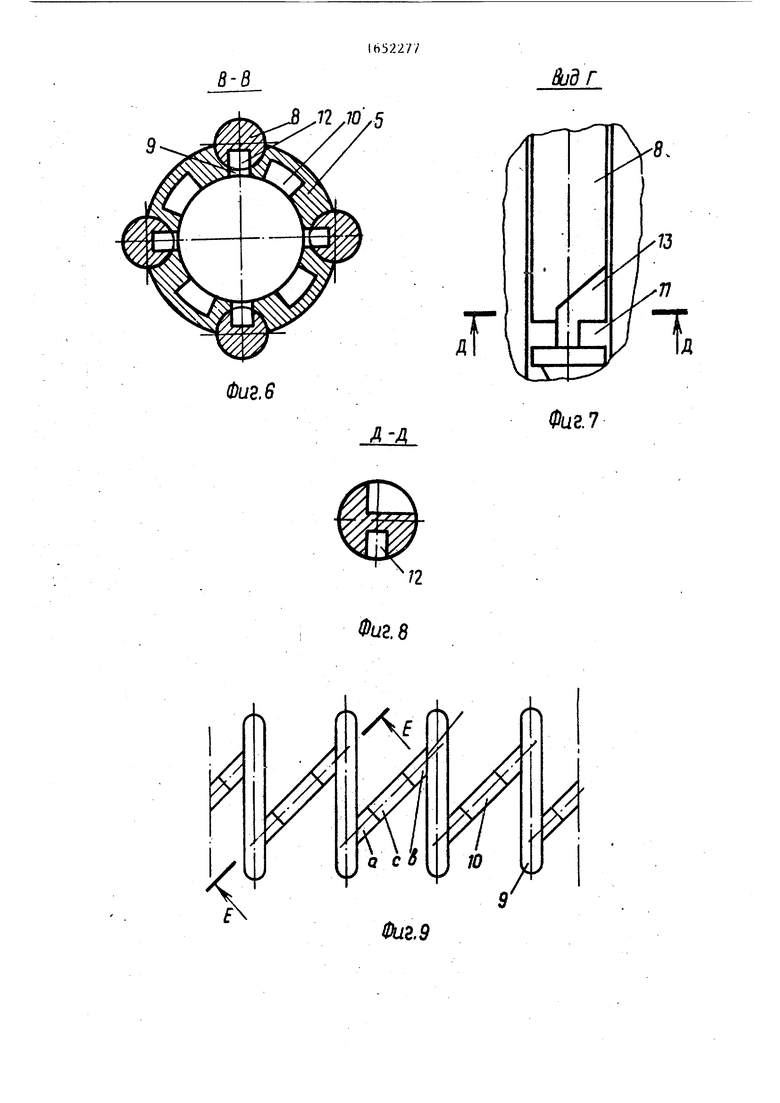
На фиг. I показано предлагаемое устройство, оЫций вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - сечение Б-Б на фиг. 3; на фиг. 5 - ловитель с упорами; на фиг. о - сечение В-В на фиг, 3; на фиг . / - вид по стрелке Г на фиг. 3; на фш . 8 -- сечение Д-Д на фиг. 7; на фиг . У - развертка
фигурного паза барабана; на фиг.10 - сечение Е-Е на фиг. 9; на фиг. II - развертка поверхности вкладыша.
Грузозахватное устройство содер- жит корпус 1, на стоиках 2 которого расположены ловители 3 и захватные рычаги 4, установленные шарнирно. На корпусе 1 установаен механизм управления захватными рычагами, состоящий из копира 5, штока b и храпового колеса /. Копир 5 выполнен в форме полого о,фаояна с радиусными выемками с на- ру/лнои стороны под цилиндрические вкладыши 8 и фигурным пазом с внутренней стороны, состоящим из пряных 9 и наклонных 10 участков. Прямые
СЭ СП N3 ГО vj
участки выполнены сквозными с выходом на вкладыши 8. Участки 10 имеют части а и b с переменной глубиной. Часть а имеет большую глубину чем часть Ь. Части а и b соединены между собой наклонными частями с. При переходе из наклонного участка в прямой паз имеет ступеньку d. Вкладыши 8 имеют кольцевой паз 11, продольный паз 12 и скос 13. В нижней части вкладыша 3 закреплена шестеренка 14, которая находится в зацеплении (передаточное отношение 0,з) с храповым колесом 7, имеющим в верхней части зубчатый ве- нец 15. В нижней части храпового колеса 7 закреплена коническая шестерня 1Ь, которая находится в зацеплении с шестернями 17 валов 18 (передаточное отношение 0,5). Валы 18 через кривошипы 19 связаны с тягами 20 захватных рычагов 4. Храповое колесо 7 подпружинено пружиной 21 кручения, которая одним концом закреплена на флан це 22 барабана 5, а другим - на храповом колесе 7. От проворота храповое колесо / удерживается собачками 23 и штоком 6. Собачки 23 посредством гибких тросиков 24 связаны с упорами 25, расположенными в ловителях 3. Шток 6 находится в шлицевом соединении 26 с храповым колесом 7. В средней части штока 6 имеется неподвижно закрепленный на нем ползун 2/ с подпружиненными пальцами 28. Пальцы 28 входят в пазы барабана 5 и вклады- шеи 8. Направление движения пальцев 28 по пазам определяется положением вкладышей 8. Шток 6 подпружинен пружиной 29 относительно корпуса 1, может совершать только возвратно поступательное движение и удерживается от проворота шпонкой 30. Часть вкладышей 8 имеют цилиндрические выступы 31, которые входят в радиусные пазы 32 храпового колеса 7 и обеспечивают относительное движение барабана и храпового колеса 7 только на 1/4 полного оборота. Корпус 1 имеет упор 33. Шток 6 имеет выступ 34. На верхнем конце штока находится приспособление 35 для подвески на кран.
Работает грузозахватное устройст- ро следующим образом.
В исходном состоянии захватные ры- Маги 4 разведены, храповое колесо 7 застопорено собачками 23 и шлицевым соединением штока 6, Пальцы 28 ползуна 27 находятся в прямых участках 9
20
25
30
5 ейеЮа 5 е.
- 65227/л
фигурного паза бараьана. Внутренняя поверхность пазов образована продольными пазами 12 вкладышей 8, которые j. препятствуют выходу в наклонный участок 10 барабана 5 (соответствует взведенному состоянию пружины 21).
Опускаясь, грузозахватное устройство ловителями 3 садится на такелажные элементы .Такелажные элементы воздействуют на упоры 25, которые посредством гибких тросиков 24 разводят собачки 23, освобождая храповое колесо 7. Кран, опуская грузозахватное устройство на груз, ослабляет трос. Шток 6 под действием пружины 29 опус- КЭРТСЯ в крайнее нижнее положение. При этом пальцы 28 ползуна 27 в ниж- неи части прямых участков 9 входят в кольцевые пазы 11 вкладышей 8. Одновременно шток 6 выходит из шлицевого соединения 26 с храповым колесом, В случае, если ловители 3 встают на соответствующие такелажные элементы груза, все собачки 23 освобождают храповое колесо 7, и шток 6 опускается в крайнее нижнее положение, выходя из шлицевого зацепления. Храповое колесо 7 проворачивается на 1/4 оиорота относительно барабана 5. Четверть оборота обеспечивается шысту- пом Л вкладышей 8 и пазом 32 храпового колеса 7. Вращение храпового копеса 7 передается чере; передачу (шестерни 17 и 16) на валы 18 и кривошипы 19, которые совершают половину своего полного оборота, приводя в поступательное движение тяги 200 Тяги 20 сводят захватные рычаги 4, захватывая все такелажные элементы груза. При повороте храповое колесо 7 зубчатым венцом 15 вращает шестеренку 14 совместно с вкладышами 8, которые разворачиваются против участков 9 паза барабана своими скосами 13, открывая тем самым выход пальцам 28 ползуна 27 в наклонные участки Ю и препятствуют движению по прямым участкам 9 барабана. Барабан удерживается пальцами 28 ползуна 27 от поворота за счет шпонки 30 штока 6.
При подъеме под действием крана шток t, начиная свое движение вверх, входит в шлицевое соединение 26 с храповым колесом 7, фиксируя его от проворота. При дальнейшем движении штока 6 подпружиненные пальцы 28 за счет скоса 13 вкладыша 8 входят в наклонные участки 10. вижение пальцев 28
35
40
45
50
55
.по наклонным участкам 10 фигурного |паза заставляет вращаться барабан 5, Который взводит пружину 21 для повтор ног о срабатьшания механизма. Во время движения пальцы 28 проходят части а, с, b и поднимаются, а после ступеньки d защелкиваются в прямых участках 9. Ступенька d препятствует обратному движению пальцев 28.
Пружина 21 взведена. Далее шток 6 своим выступом 34 упирается в упор 33 корпуса 1 и поднимает грузозахватное устройство.
При подъеме освобождаются упоры 25, расположенные в ловителях 3, вследствие чего собачки 23 возвращаются в зацеплении с храповым колесом 7, а захватные рычаги 4 за такелажные элементы удерживают груз.
Отдача груза происходит в той же последовательности, что и захват груза.
Использование предлагаемого устройства позволяет повысить безопасность при погрузочно-разгрузочных работах с вэрывопожароопасными грузами, так как захват груза происходит тольк в том случае, если ловители всех захватных рычагов садятся на такелажные элементы.Последние, воздействуя на упоры в ловителях, выводят собачки из зацепления с храповым колесом, которое, освобождаясь, поворачивается и сводит захватные рычаги. В противном случае храповое колесо удерживается собачкой, соответствующей ловителю, который не садится на такелажный элемент груза.
Формула изобретения
Грузозахватное устройство, содержащее корпус, размещенную в нем с возможностью перемещения по вертикали штангу, закрепленный на ней. ползун, соединенные с ползуном пальцы, копир с фигурными пазами для взаимодействия с пальцами, шарнирно установленные на
5
ные на корпусе поворотные согчпки, отличающеес я тем,что, с целью повышения надежности работы, оно снабжено установленным на штанге с возможностью поворота вокруг нее храповым колесом с выполненными на его торце радиусными пазами, закрепленными на корпусе ловителями для взапмо- действия с такелажными органами груза, шарнирно установленными в них упорами, гибкими тросиками, соединенными с упорами и собачками, валами, кинематически связанными одними своими 5 концами с захватными рычагами, а другими - с храповым колесом, кинематически соединенными с храповым колесом цилиндрическими вкладышами с цилиндрическими выступами, расположенными в радиусных пазах храпового колеса с возможностью перемещения по ним, и пружиной кручения, концы которой закреплены на копире и храповом колесе, при этом штанга и храповое колесо выполнены со средствами фиксации для удерживания храпового колеса от поворота в нижнем положении штанги, копир выполнен в виде установленного с возможностью поворота на штанге полого барабана, на внутренней поверхности которого выполнены упомянутые фигурные пазы, имеющие прямые и сопряженные с ними наклонные участки с переменной глубиной, а на наружной - радиусные выемки, симметрично расположенные относительно прямых участков пазов на внутренней поверхности и пересекающиеся с ними, в которых расположены с возможностью поворота вокруг своей оси упомянутые цилиндрические вкладыши, выполненные с кольцевой канавкой в нижней части и диаметрально противоположно расположенными скосом для сопряжения кольцевой канавки с наклонным участком паза барабана и параллельным оси вкладыша пазом, поворотные собачки подпружинены к зубьям храпового колеса, причем число собачек и ловителей равно числу захватных
0
5
0
5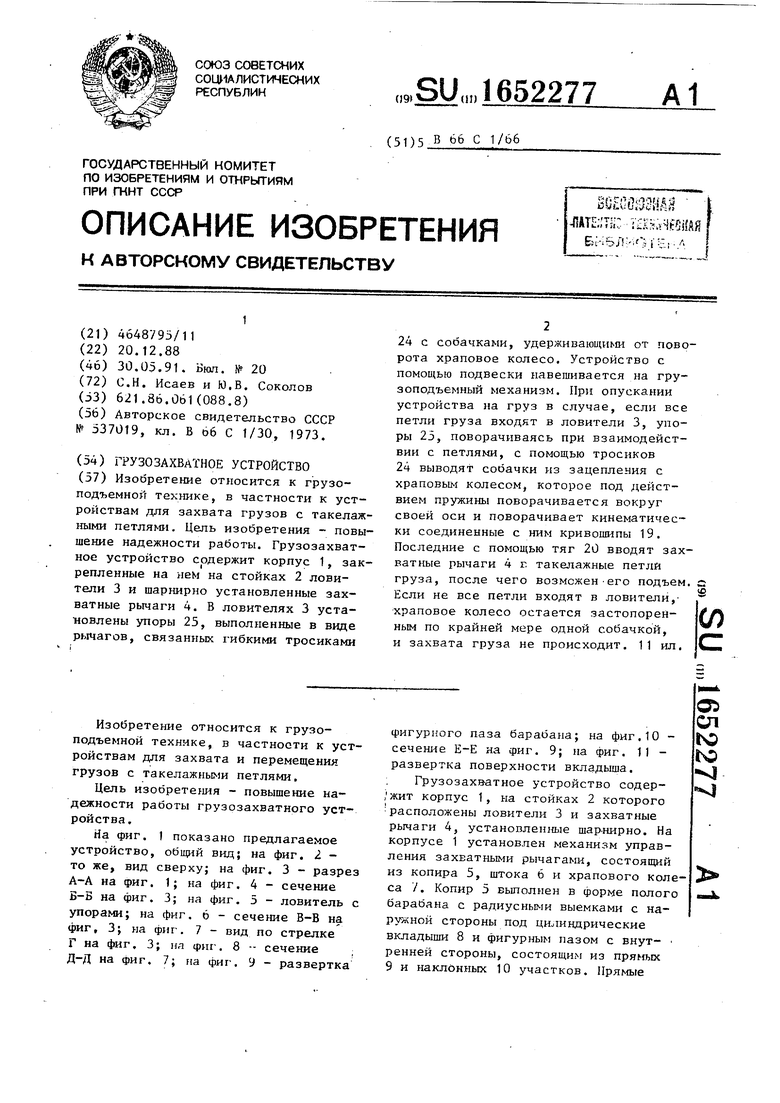
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Грузозахватное устройство | 1989 |
|
SU1768492A2 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Автоматический ключ для свинчивания и развинчивания насосных штанг | 1986 |
|
SU1350325A1 |
| Грузозахватное устройство | 1977 |
|
SU839978A1 |
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Захватное устройство для грузов с такелажными кронштейнами | 1990 |
|
SU1736903A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Автомат для сборки радиаторов | 1982 |
|
SU1042944A1 |
| Грузозахватное устройство | 1990 |
|
SU1798290A1 |


Изобретение относится к грузоподъемной те., в частности к устройствам для захвата грузов с такелажными петлями. Цель изобретения - повышение надежности работы. Грузозахватное устройство содержит корпус 1, закрепленные на нем на стойках 2 ловители 3 и шарнирно установленные захватные рычаги 4. В ловителях 3 установлены упоры 25, выполненные в виде рычагов, связанных iибкими тросиками 24 с собачками, удерживающими от поворота храповое колесо. Устроисгво с помощью подвески навешивается на грузоподъемный механизм. При опускании устройства на груз в случае, если все петли груза входят в ловители 3, упоры 25, поворачиваясь при взаимодействии с петлями, с помощью тросиков 2ц выводят собачки из зацепления с храповым колесом, которое под действием пружины поворачивается вокруг своей оси и поворачивает кинематически соединенные с ним кривошипы 19. Последние с помощью тяг 20 вводят захватные рычаги 4 г такелажные петли груза, после чего возможен его подъем, с Ксли не все петли входят в ловители, храповое колесо остается застопоренным по крайней мере одной сооачкой, и захвата груза не происходит. 11 ил. (Л
корпусе захватные рычаги и установлен-50 рычагов.
и
Фиг1
Фиг.I
вг
91 М
Ы
«I
6-5
Увеличено, повернуто 90
24
Фиг. 5
Г:
OQ
I
ОЭ
05
CSI
00
CVJ
k:
°
CO
4
CO
cu
s
Фиг.Ю
Фаг. 11
