Область техники
Предлагаемое изобретение относится к системе управления буровыми роботами для спускоподъемных операций при бурении и способу ее работы.
Предшествующий уровень техники
Из уровня техники известна буровая установка PACE®-R801, показанная на видео “PACE®-R801, the World’s First Fully Automated Land Drilling Rig”, опубликованном в сети интернет 07.10.2021 по адресу https://www.youtube.com/watch?v=6V5GXk4zrXY, в которой робот берет секции трубы и перемещает их над центром буровой колонны, чтобы быстро соединить трубу. Принцип работы указанной установки заключается в том, что робот берет свечу из множества горизонтально уложенных свечей, поднимает ее на определенную высоту, поворачивает и подводит к месту соединения с колонной бурильных труб, затем она подвешивается на элеватор и свинчивается с колонной.
Недостатками известной установки являются необходимость использовать мощные роботы, которые смогут удерживать вес свечи, сложность расчетов для определения местоположения конца свечи, который подлежит соединению с колонной бурильных труб, поскольку аз-за неровной укладки свечей невозможно точно рассчитать положение конца трубы. Кроме того, в известной установке отсутствует ограничитель для удержания свечей, что повышает риск аварий на установке.
В качестве наиболее близкого аналога можно выбрать публикацию международной заявки на выдачу патента WO 2021203122 A1, опубликованную 07.10.2021, из которой известна система манипулирования бурильными трубами на буровой установке, которая включает в себя подъемную систему для управления нагрузкой на свечу, первый робот для манипулирования нижним концом свечи, второй робот для манипулирования верхним концом свечи и магазин для хранения свечей.
Недостатком известной установки также является необходимость использовать мощные роботы, которые смогут удерживать вес свечи, отсутствие контроля за положением нижнего конца свечи, который подлежит соединению с колонной бурильных труб, поскольку нижний робот начинает взаимодействие с нижним концом трубы после того, как верхний робот уже отклонил ее и подвел к элеватору, что увеличивает риск неконтролируемого отклонения нижнего конца свечи и сложность ее поиска нижним роботом. Кроме того, в известной установке отсутствует ограничитель для удержания свечей в магазине, что повышает риск аварий на установке.
Раскрытие сущности изобретения
Задачей настоящего изобретения и техническим результатом является повышение безопасности и надёжности осуществления спускоподъемных операций, снижение требований к используемому оборудованию и сокращение времени на осуществление спускоподъемных операций.
Для решения вышеуказанной задачи и достижения технического результата предлагается система буровых роботов для спускоподъемных операций, включающая
нижний робот, имеющий захват, выполненный с возможностью удерживать нижний конец свечи и регулировать его положение в горизонтальной плоскости,
верхний робот, имеющий захват, выполненный с возможностью удерживать верхний конец свечи и регулировать его положение в горизонтальной плоскости,
элеватор, выполненный с возможностью регулировать высоту подъема свечи,
магазин для удержания свечей,
средства управления, выполненные с возможностью управления положением элеватора, нижнего робота и верхнего робота,
отличающаяся тем, что
средства управления выполнены с возможностью с заданной периодичностью определять значение высоты подъема свечи (y) и перемещать захват нижнего робота вместе с нижним концом свечи в горизонтальной плоскости в заранее заданные координаты (x, z), соответствующие определенному значению высоты подъема свечи (y).
За счет удержания (фиксации) концов свечи в захватах нижнего и верхнего роботов можно в любой момент времени узнавать их положение с помощью прямой кинематики робота. О том, как на основании данных о перемещении узлов робота можно рассчитать координаты местонахождения заданного узла и управлять им удаленно, рассказывается например, в статье «Cartesian coordinate control for teleoperated construction machines», опубликованной 15.07.2020, авторы Hyung Joo Lee, Sigrid Brell-Cokcan, URL: https://link.springer.com/article/10.1007/s41693-021-00055-y.
За счет того, что средства управления выполнены с возможностью с заданной периодичностью определять значение высоты подъема свечи (y) и перемещать захват нижнего робота вместе с нижним концом свечи в горизонтальной плоскости в заранее заданные координаты (x, z), соответствующие определенному значению высоты подъема свечи (y), можно уменьшить нагрузку от веса свечи, приходящуюся на нижний робот, поскольку в таком случае от него требуется лишь своевременно перемещать нижний конец свечи в заданные координаты по горизонтали, в то время как подъем свечи производится элеватором, поскольку нижний робот удерживает свечу, то он также поднимается со свечой при ее подъеме. Это позволит использовать менее мощные роботы, поскольку от них не требуется удерживать вес свечи, их функция заключается лишь в удержании (фиксации) нижнего конца свечи и перемещении его в заданном направлении по горизонтали, чтобы в конечном итоге постепенно подвести нижний конец свечи к месту его присоединения к колонне бурильных труб (муфте). Использование менее мощных роботов позволит проводить модернизацию не только произведенных, но и уже эксплуатирующихся буровых установок.
При подъеме из скважины бурильные свечи нижним концом устанавливают на подсвечник, а верхний конец свечей заводят в магазин для удержания свечей, который обычно находится на уровне балкона верхового.
Предпочтительно, магазин для удержания свечей имеет пальцы и оснащенные рычагами ограничители, причем рычаги выполнены с возможностью под воздействием на них подвижного модуля последовательно отклонять ограничители, освобождая проход для свечи по мере ее движения, при этом подвижный модуль выполнен с возможностью приводиться в движение средствами управления при заданном положении верхнего робота, а ограничители выполнены с возможностью после отклонения возвращаться в исходное положение под действием силы тяжести.
Ограничитель предназначен для предотвращения выпадения свечей из магазина для удержания свечей. Автоматически открываемый ограничитель позволяет избегать аварийных ситуаций от выпадения свечей из магазина, а также позволяет сократить время на вывод свечи из магазина. Предлагаемый вид автоматизации работы ограничителя магазина для удержания свечей позволяет проводить модернизацию не только произведенных, но и уже эксплуатирующихся буровых установок. В отличие от предлагаемых на рынке решений, где каждый ограничитель выпадения свечей управляется собственным пневмо-/гидроцилиндром, в настоящем изобретении управление ограничителями осуществляется одним подвижным модулем, что значительно уменьшает количество сигналов и устройств, а значит повышает надежность системы. Кроме того, использование одного подвижного модуля для активации нескольких ограничителей позволяет уменьшить размеры системы управления ограничителями, облегчить ее обогрев и препятствовать ее заклиниванию на морозе.
Предпочтительно, подвижный модуль представляет собой устройство для нажатия на рычаги, перемещаемое в линейном направлении вдоль направляющей.
Предпочтительно, подвижный модуль представляет собой пневмоцилиндр, гидроцилиндр, электроцилиндр или приводной кулачок, перемещаемый вдоль направляющей.
Предпочтительно, подвижный модуль представляет собой кулачок с зубчатым колесом, перемещаемый вдоль зубчатой рейки, или исполнительный механизм, перемещаемый на ременной передаче.
Вышеуказанные варианты осуществления подвижного модуля являются предпочтительными поскольку они позволяют получить надежный и компактный механизм для управления ограничителями.
Предпочтительно, захват нижнего робота шарнирно соединен с нижним роботом, а захват верхнего робота шарнирно соединен с верхним роботом.
Наличие шарнира между захватом и основным телом робота позволяет компенсировать отклонения свечи при сохранении ее фиксации в захвате, что повышает точность определения местоположения конца свечи, а также позволяет избегать аварийных ситуаций, связанных с заклиниванием свечи или захвата при передвижении.
Кроме того, для решения вышеуказанной задачи и достижения технического результата предлагается способ управления системой буровых роботов для спускоподъемных операций, включающей
нижний робот, имеющий захват, выполненный с возможностью удерживать нижний конец свечи и регулировать его положение в горизонтальной плоскости,
верхний робот, имеющий захват, выполненный с возможностью удерживать верхний конец свечи и регулировать его положение в горизонтальной плоскости,
элеватор, выполненный с возможностью регулировать высоту подъема свечи,
магазин для удержания свечей,
средства управления, выполненные с возможностью управления положением элеватора, нижнего робота и верхнего робота,
при этом способ включает этапы:
a) захватом верхнего робота передвигают верхний конец свечи из магазина для удержания свечей в зону для зацепления с элеватором, причем после зацепления верхнего конца свечи с элеватором верхний робот отпускает верхний конец свечи,
b) с помощью элеватора поднимают верхний конец свечи на заданную высоту подъема свечи,
при этом во время подъема свечи средства управления с заданной периодичностью определяют значение высоты подъема свечи (y) и перемещают захват нижнего робота вместе с нижним концом свечи в горизонтальной плоскости в заранее заданные координаты (x, z), соответствующие определенному значению высоты подъема свечи (y).
Предпочтительно, во время этапа a) захват нижнего робота обеспечивает нахождение нижнего конца свечи в заданной зоне на полу буровой.
Удержание нижним роботом нижнего конца свечи в заданной зоне до начала перемещения верхнего конца свечи верхним роботом позволяет точно рассчитывать местоположение нижнего конца свечи, например, путем обратной кинематики на основании данных о положении узлов робота, и избегать аварийных ситуаций от непредсказуемого перемещения нижнего конца свечи, которое происходит, если нижний конец свечи не удерживают во время перемещения верхнего конца свечи. Это также позволяет экономить время на поиск нижнего конца свечи и как результат сокращать время спускоподъемных операций.
Предпочтительно, магазин для удержания свечей имеет пальцы и оснащенные рычагами ограничители, причем рычаги под воздействием на них подвижного модуля последовательно отклоняют ограничители, освобождая проход для свечи по мере ее движения, при этом подвижный модуль приводится в движение средствами управления при заданном положении верхнего робота, а ограничители после отклонения возвращаются в исходное положение под действием силы тяжести.
Предпочтительно, до этапа a) нижний робот используют для контроля смазки муфты, с которой будет соединяться свеча, и определения координат муфты.
Это позволит уменьшить количество устройств на буровой и сократить время на осуществление спускоподъемных операций, при этом на основании данных, полученных от нижнего робота, можно определить координаты муфты и рассчитать траекторию движения нижнего конца свечи таким образом, чтобы она могла беспрепятственно соединиться с муфтой.
Предпочтительно, верхний робот начинает передвижение свечи из магазина для удержания свечей в зону для зацепления с элеватором на основании полученных данных о положении и состоянии элеватора.
На основании данных о положении и состоянии элеватора можно прогнозировать время прохождения объектов, блокирующих перемещение (другие свечи и т.п.), а также местоположение и состояние элеватора (высота, наклон, открыты/закрыты створки) в заданный момент времени, что позволяет начать движение в заблокированную в текущий момент зону с учетом её освобождения к моменту её прохода. Это позволит сократить время на осуществление спускоподъемных операций и повысить надежность и безопасность осуществления спускоподъемных операций. Данные о положении и состояния элеватора могут быть получены любым известным способом, например, путем использования меток и оптических датчиков меток, которые позволяют определить состояние, в частности факт открытия/закрытия створок элеватора, отклонение элеватора на штропах и так далее.
Краткое описание чертежей
Чертежи представлены для лучшего понимания изобретения, однако специалисту в данной области техники будет очевидно, что раскрытое изобретение не ограничивается вариантом, представленным на них.
На фиг. 1 представлена фотография пола буровой установки с установленными на нем свечами.
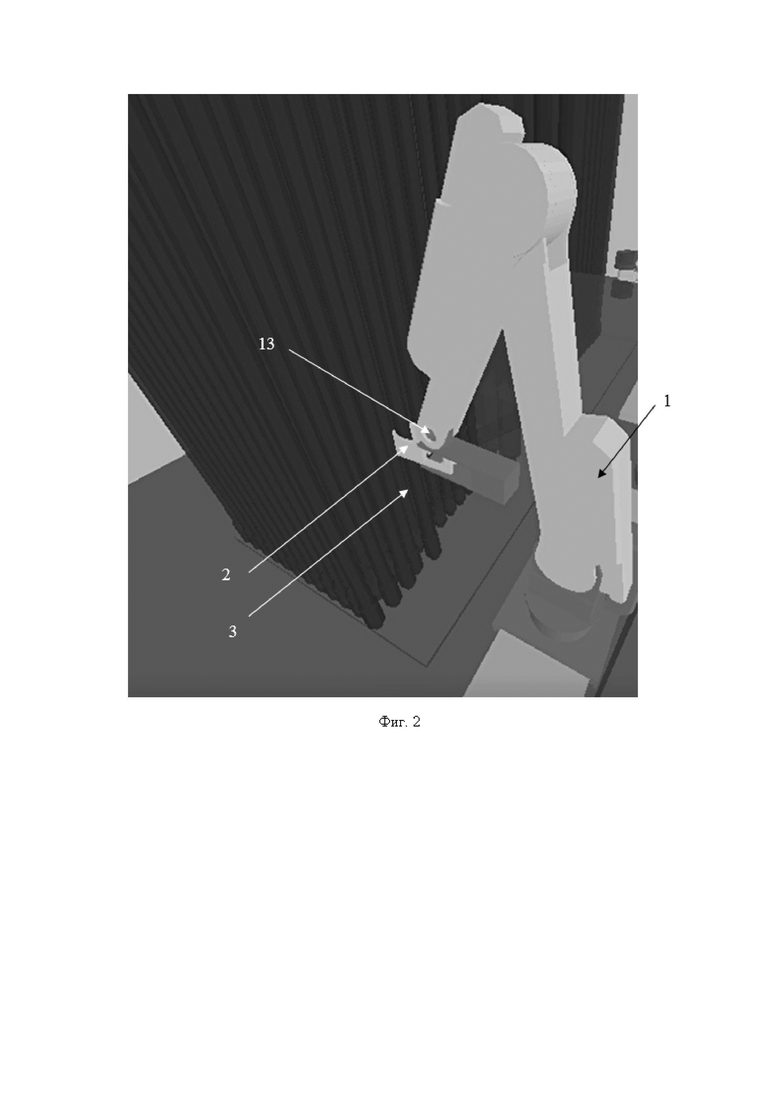
На фиг. 2 представлено объемное изображение нижнего робота, захват которого удерживает нижний конец свечи.
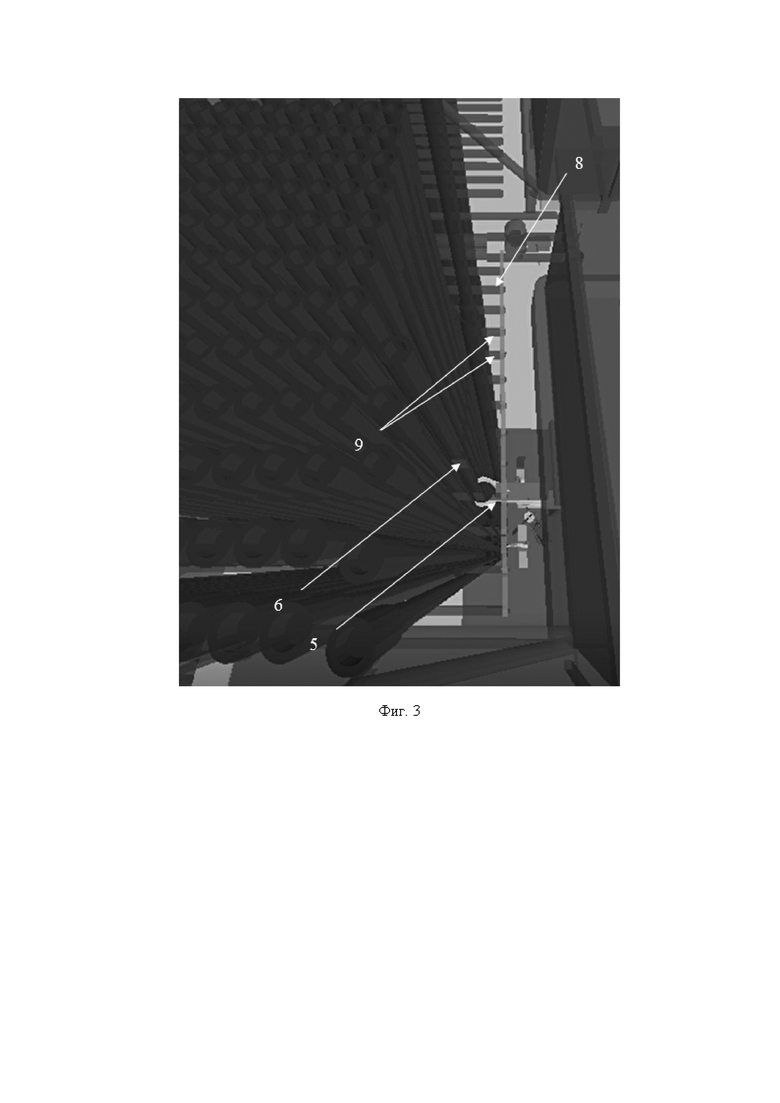
На фиг. 3 представлено объемное изображение, вид сверху верхнего робота, приближающегося к верхнему концу свечи.
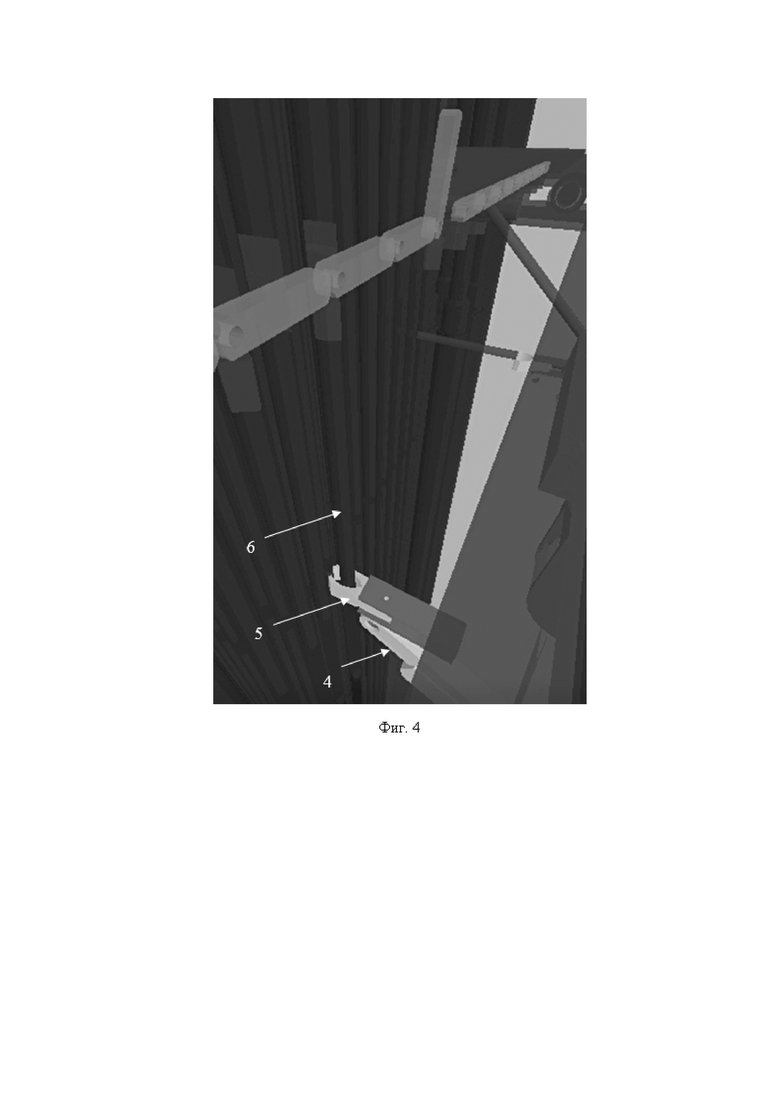
На фиг. 4 представлено объемное изображение верхнего робота, вид сбоку, захват которого удерживает верхний конец свечи.
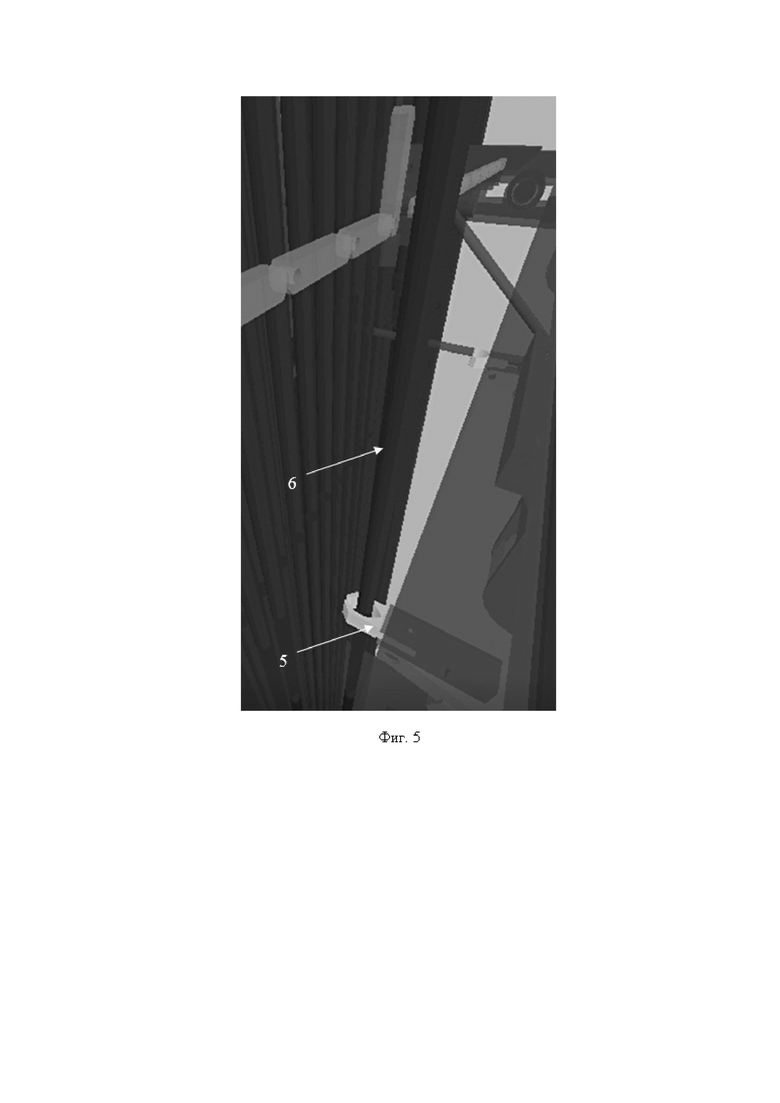
На фиг. 5 представлено объемное изображение, вид сбоку, того, как верхний робот выводит верхний конец свечи из магазина для удержания свечей.
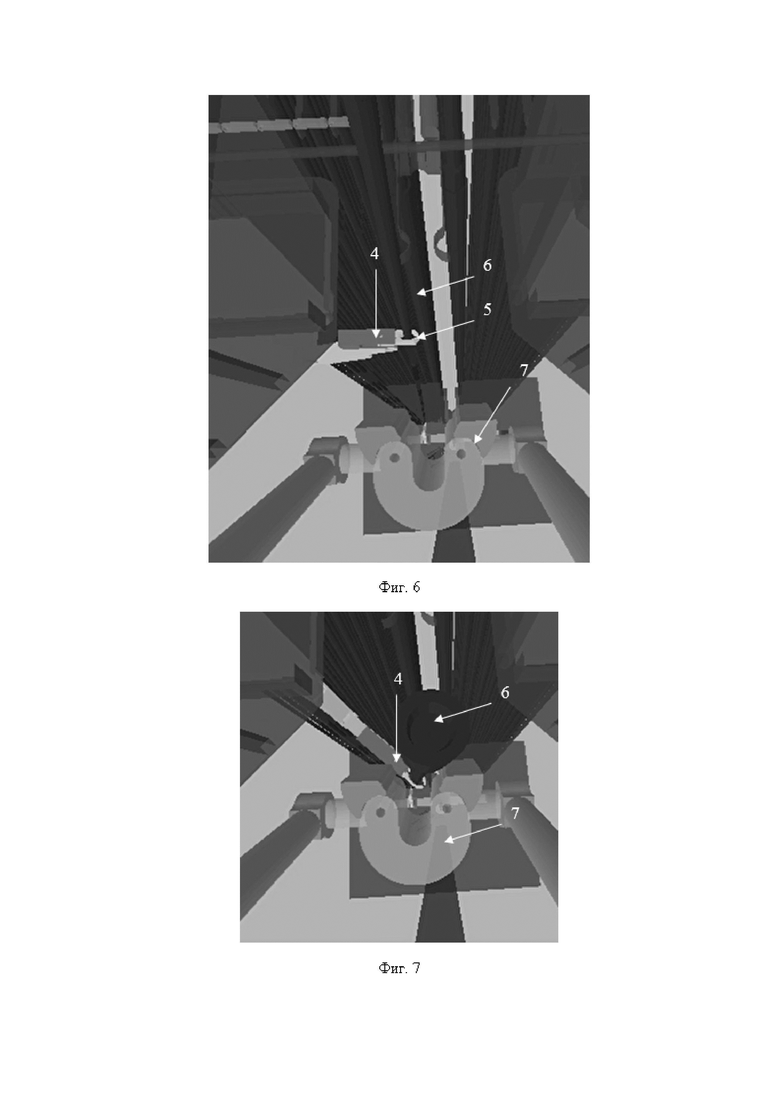
На фиг. 6, 7 представлено объемное изображение, вид сверху, того, как верхний робот подводит верхний конец свечи к элеватору.
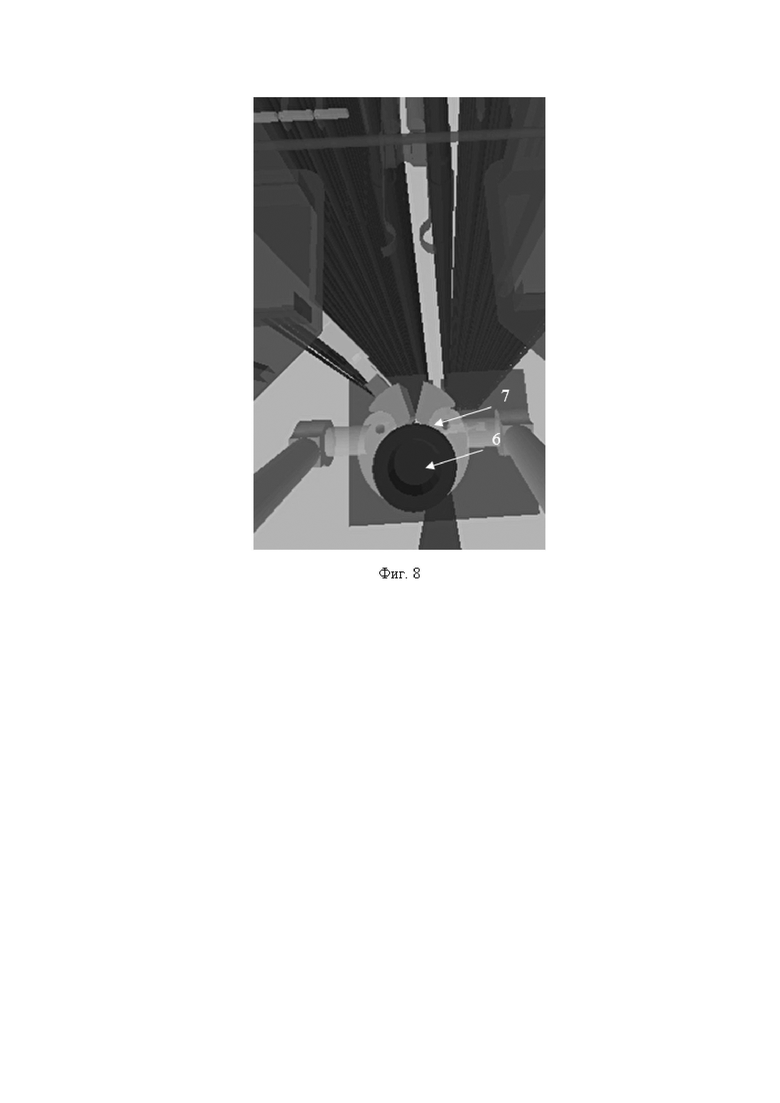
На фиг. 8 представлено объемное изображение, вид сверху, того, как створки элеватора зажимают верхний конец свечи.
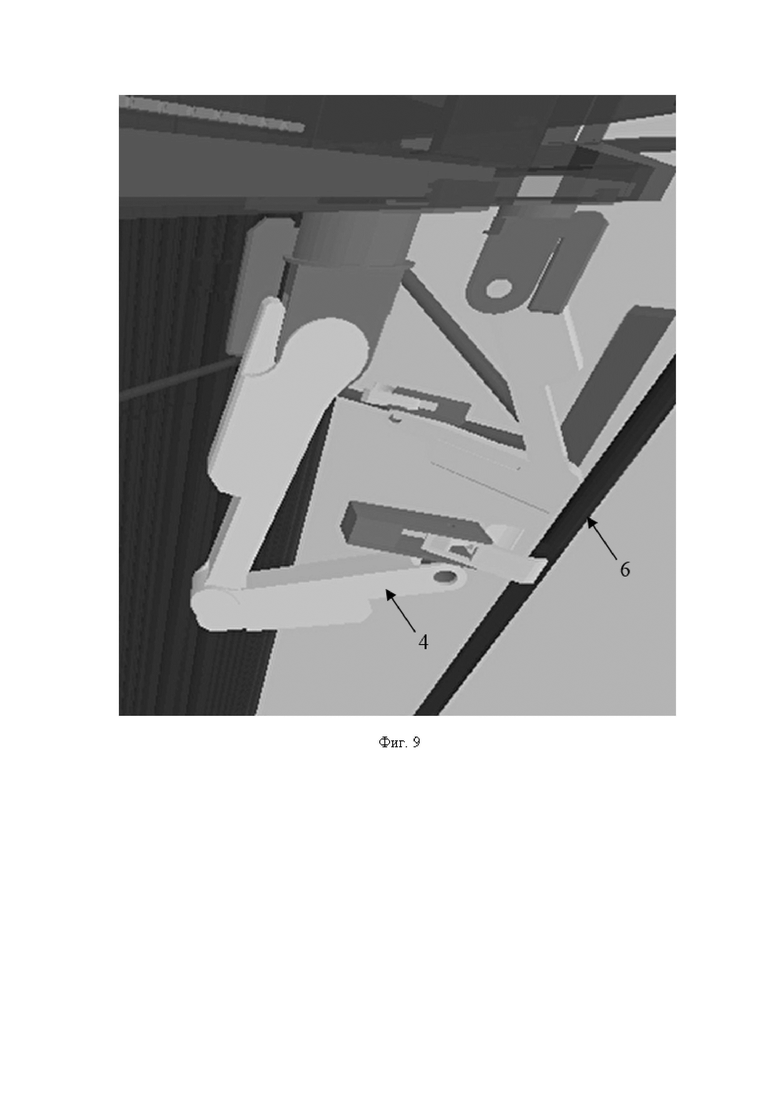
На фиг. 9 представлено объемное изображение, вид сбоку, того, как верхний робот отпускает верхний конец свечи.
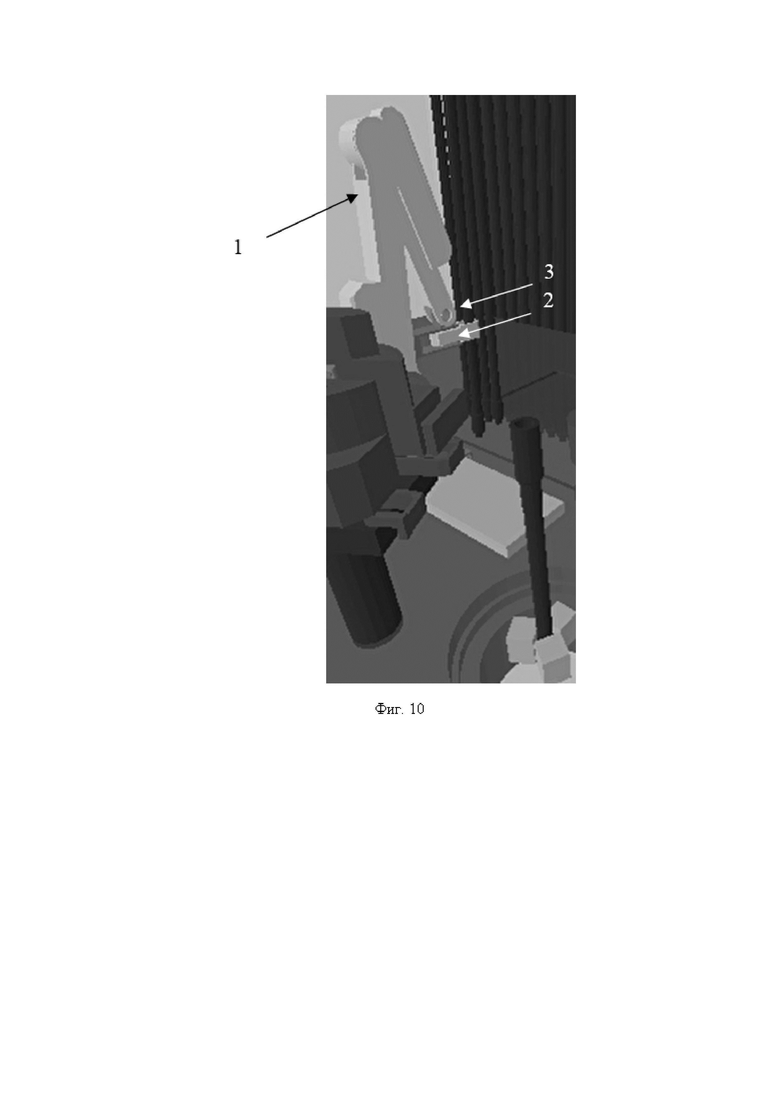
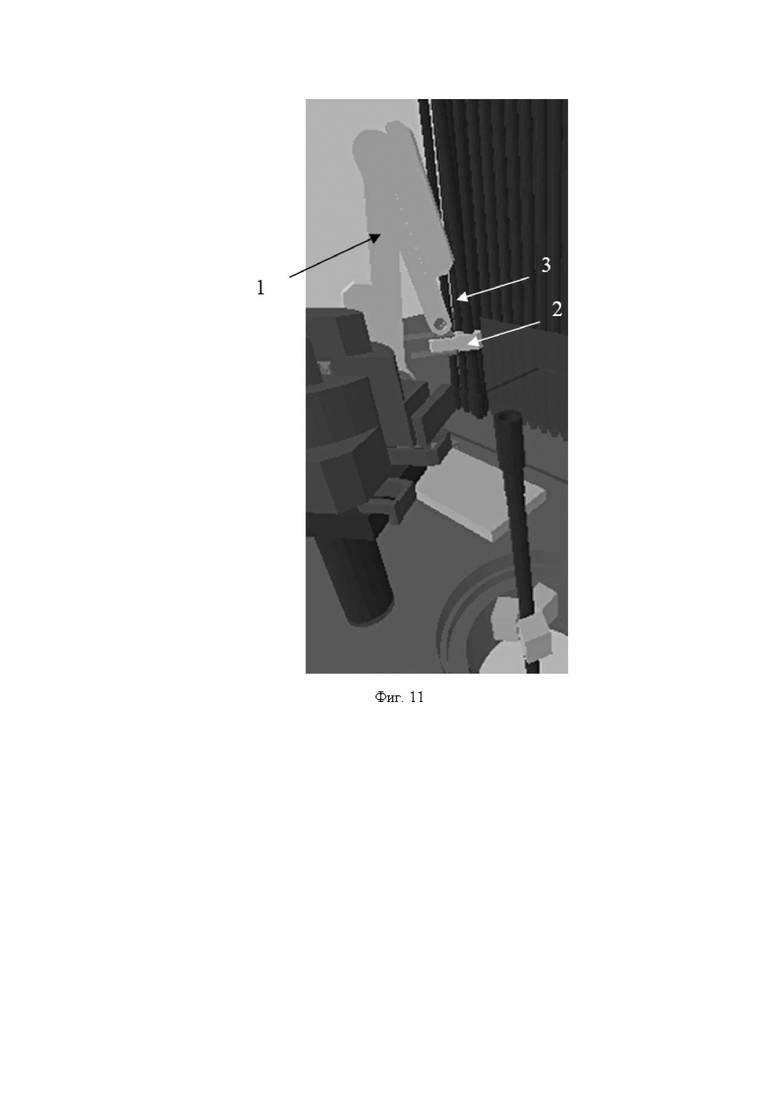
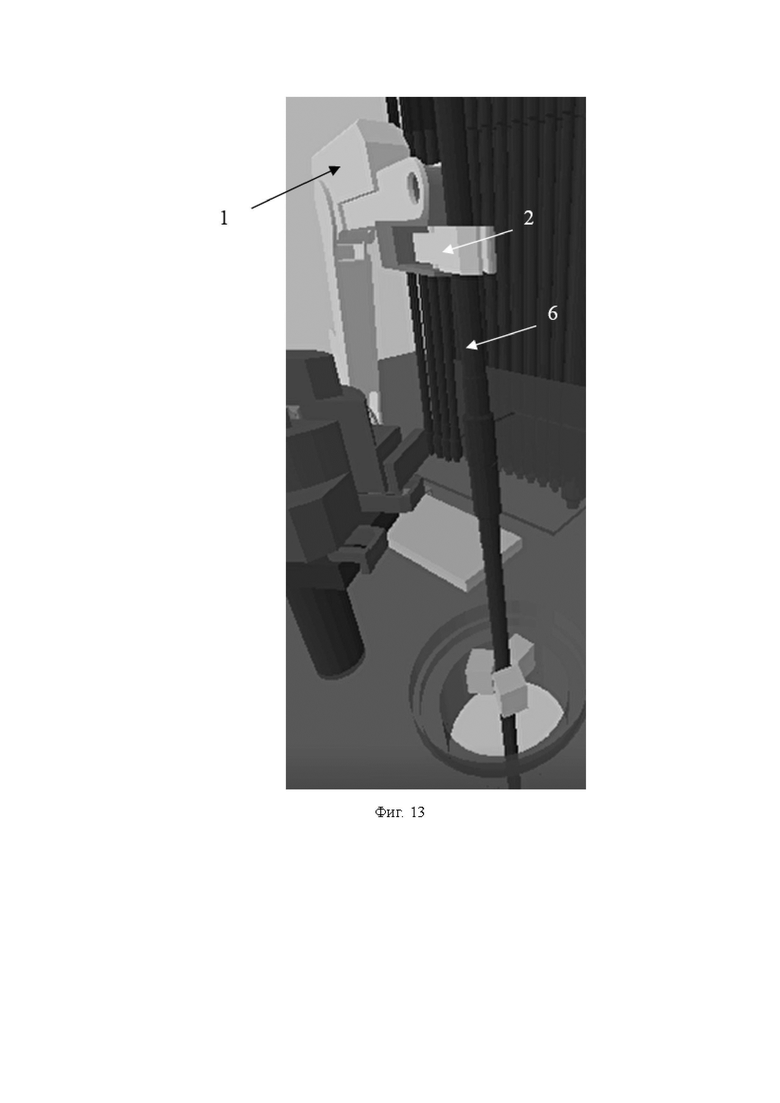
На фиг. 10-13 представлено объемное изображение, вид сбоку, того, как нижний робот перемещает нижний конец свечи к колонне бурильных труб, с которой она будет соединена.
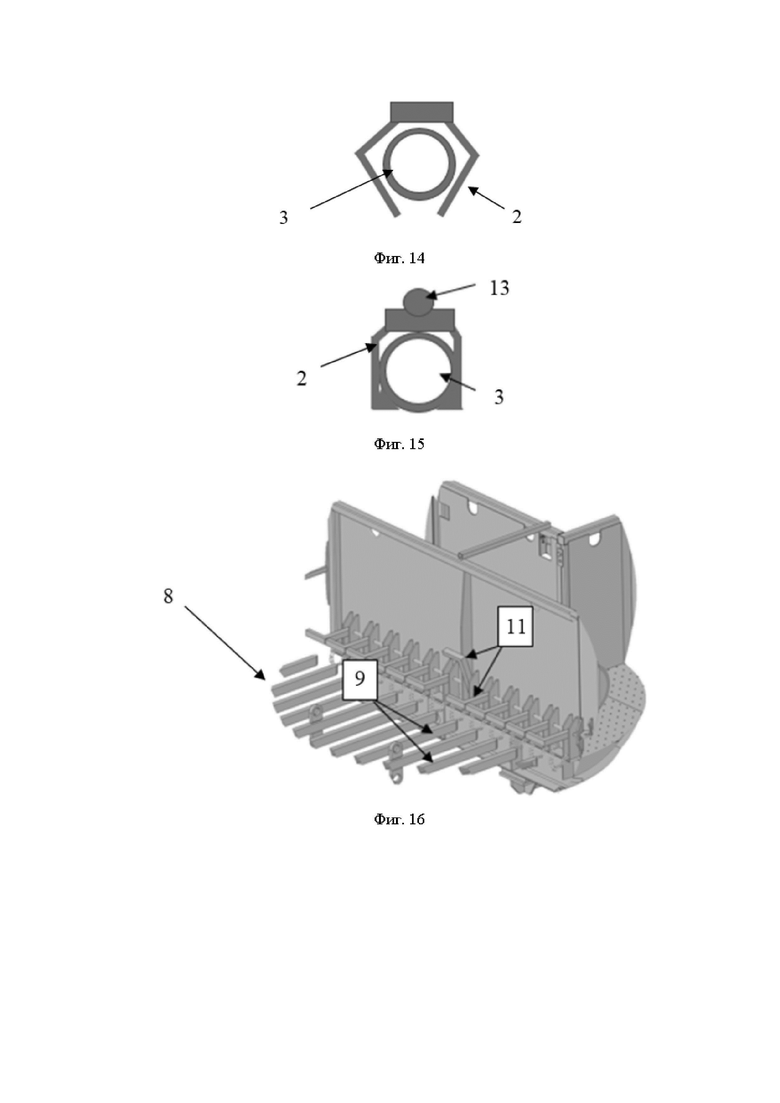
На фиг. 14 представлено схематичное изображение, вид сверху, захвата робота, известного из уровня техники.
На фиг. 15 представлено схематичное изображение, вид сверху, захвата робота согласно настоящему изобретению.
На фиг. 16 представлено объемное изображение вида спереди магазина для удержания свечей.
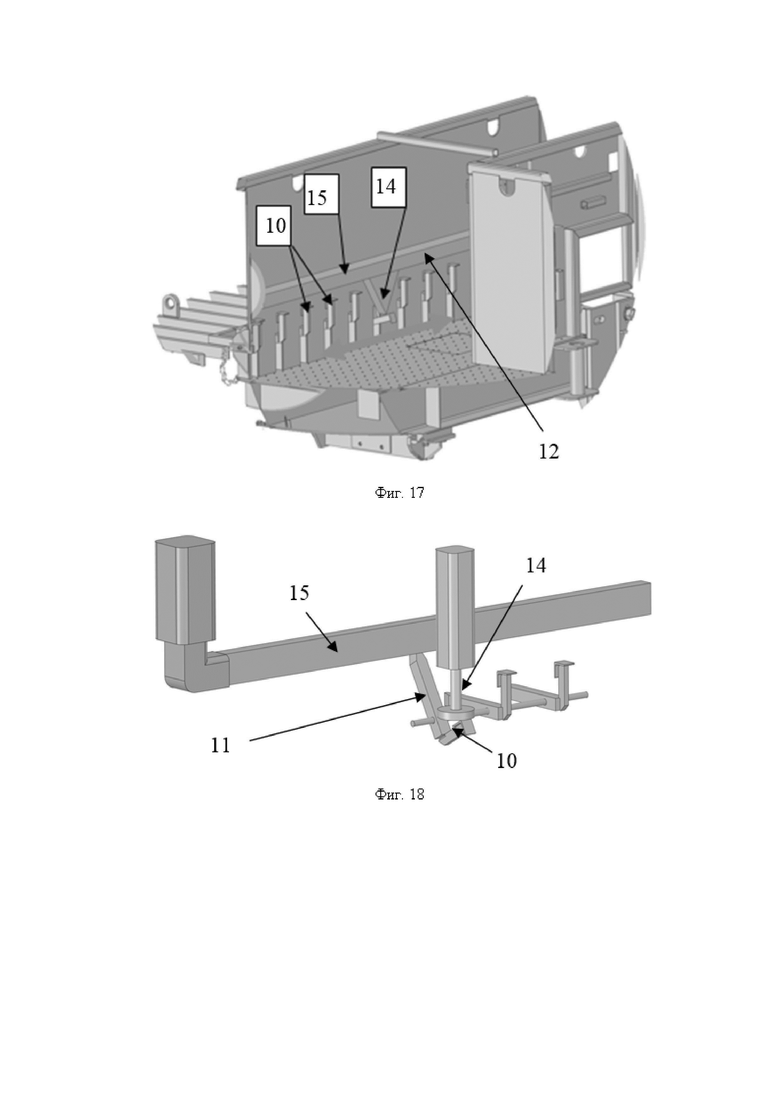
На фиг. 17 представлено объемное изображение вида сзади магазина для удержания свечей.
На фиг. 18 представлено объемное изображение подвижного модуля, который представляет собой пневмоцилиндр, гидроцилиндр или электроцилиндр, перемещаемый вдоль направляющей на каретке.
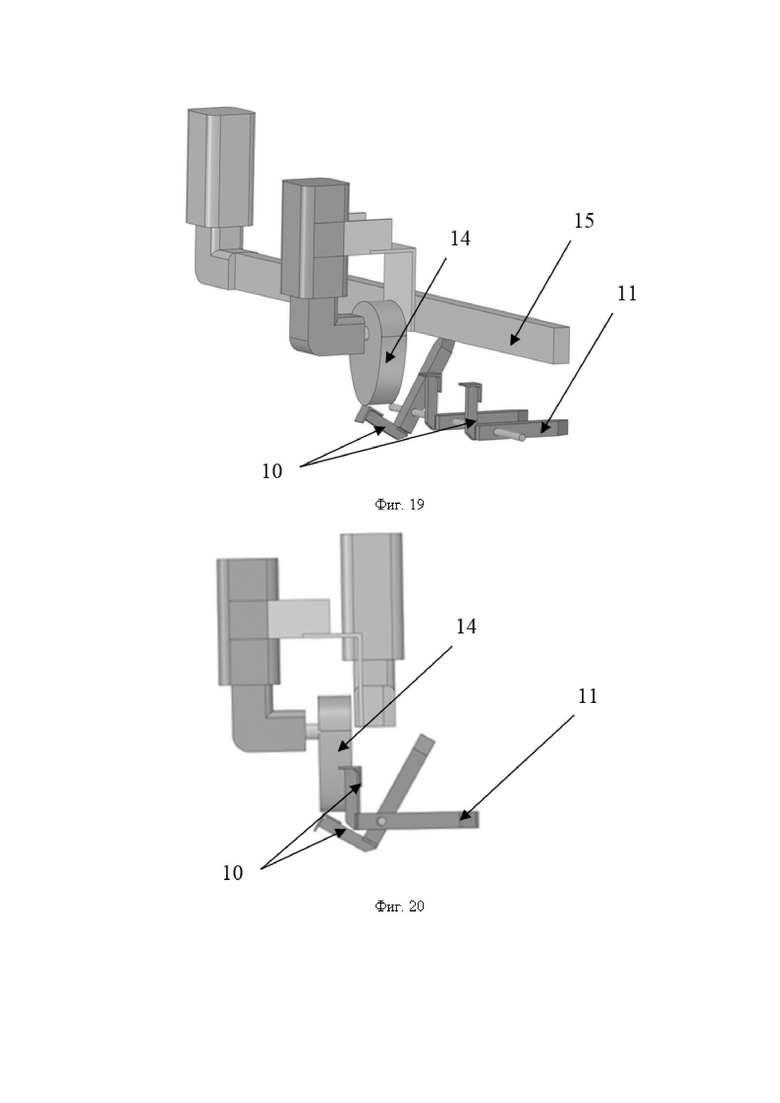
На фиг. 19, 20 представлено объемное изображение подвижного модуля, который представляет собой приводной кулачок, перемещаемый вдоль направляющей.
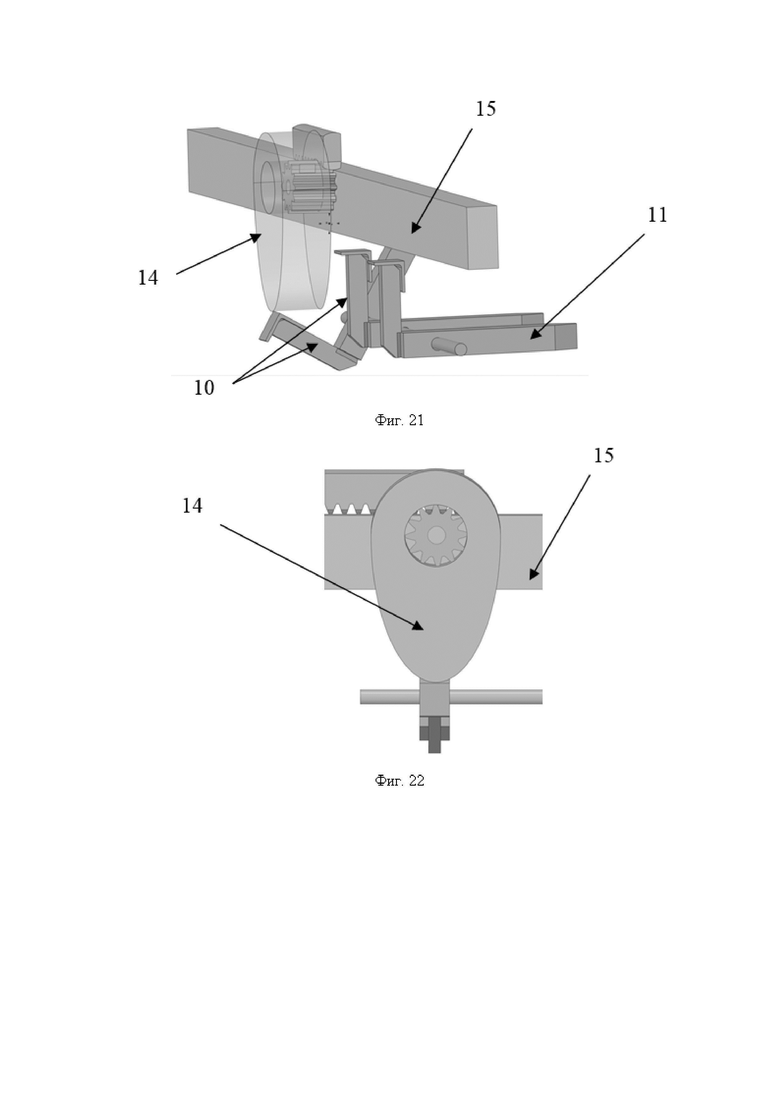
На фиг. 21, 22 представлено объемное изображение подвижного модуля, который представляет собой кулачок с зубчатым колесом, перемещаемым вдоль зубчатой рейки.
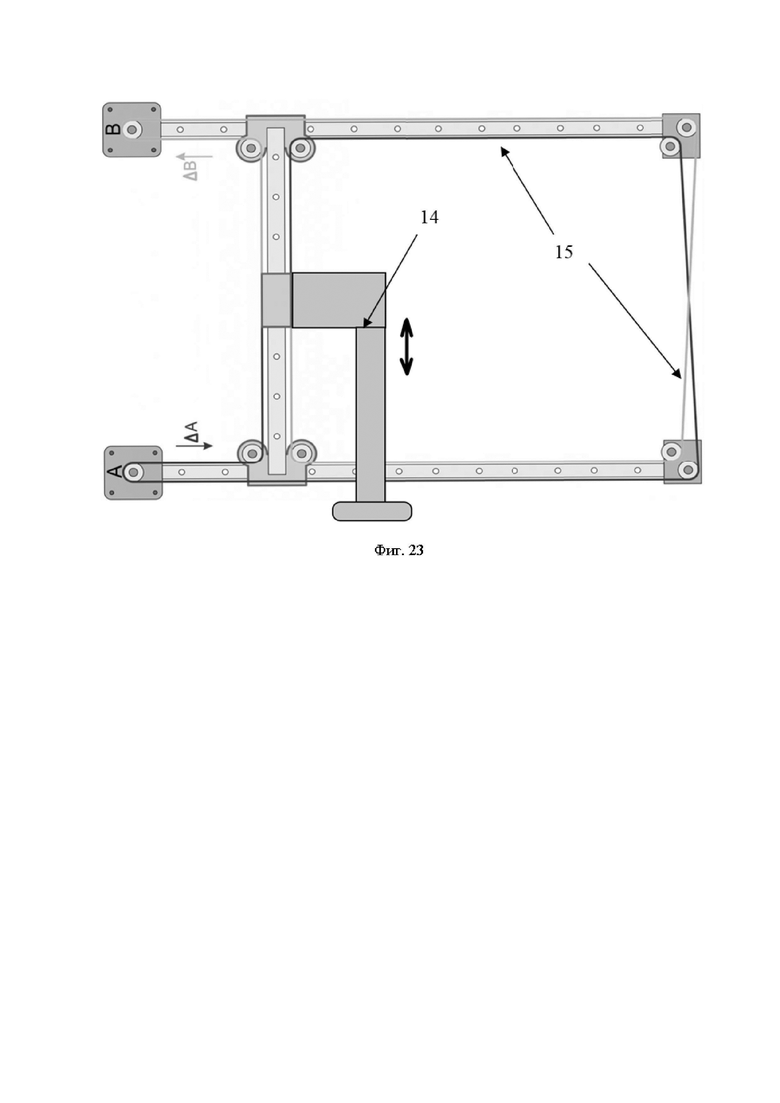
На фиг. 23 представлен вид сверху подвижного модуля, который представляет собой исполнительный механизм, перемещаемый на ременной передаче
Лучшие варианты осуществление изобретения
Система буровых роботов для спускоподъемных операций, включает
нижний робот 1, имеющий захват 2, выполненный с возможностью удерживать нижний конец 3 свечи и регулировать его положение в горизонтальной плоскости,
верхний робот 4, имеющий захват 5, выполненный с возможностью удерживать верхний конец 6 свечи и регулировать его положение в горизонтальной плоскости,
элеватор 7, выполненный с возможностью регулировать высоту подъема свечи,
магазин 8 для удержания свечей,
средства управления (не показаны), выполненные с возможностью управления положением элеватора 7, нижнего робота 1 и верхнего робота 4.
Магазин 8 для удержания свечей имеет пальцы 9 и оснащенные рычагами 10 ограничители 11, причем рычаги 10 под воздействием на них подвижного модуля 12 последовательно отклоняют ограничители 11, освобождая проход для свечи по мере ее движения.
Подвижный модуль 12 приводится в движение средствами управления при заданном положении верхнего робота 4, а ограничители 11 после отклонения возвращаются в исходное положение под действием силы тяжести.
Захват робота (верхнего или нижнего) соединен с роботом посредством шарнирного соединения 13.
Пример операции спуска.
Этап 1. Определение положения муфты свечи, с которой будет соединяться ниппель новой свечи.
Положение муфты обеспечивается лебедкой после завершения предыдущего цикла операций.
В настоящем изобретении нижний робот определяет компьютерным зрением центр торца муфты свечи и ее высоту над полом при операции контроля смазки муфты и пересчитывает пространственные координаты (x, y, z) с помощью прямой кинематики робота.
Таким образом, нижний робот получает данные о позиции муфты свечи, на основании которых компьютер с учётом сведений о диаметре отверстия муфты рассчитывает положение точек зоны отверстия этой муфты, а также положение точек зоны, в которую нужно переместить ниппель новой свечи для безопасного соединения с муфтой, чтобы избежать столкновения с муфтой и при этом оказаться от нее на малом расстоянии.
Этап 2. Перемещение верхней части свечи из подсвечника в элеватор.
Нижний робот 1 удерживает (фиксирует) захватом 2 нижний конец 3 свечи в заданной зоне на полу буровой, в результате свеча не может двигаться по вертикали, поскольку она упирается в пол буровой установки под своим весом, а в горизонтальной плоскости она удерживается нижним роботом 1.
Пока нижний конец 3 свечи удерживается нижним роботом 1 на полу буровой, верхний робот 4 захватывает верхний конец 6 свечи и, наклоняя её, подводит в заданную точку ожидания подъема элеватора 7.
На основании данных о положении верхнего робота 4 средствами управления приводится в движение подвижный модуль 12, размещенный на внутренней стороне балкона, который воздействует на рычаги 10 ограничителей 11 и последовательно отклоняет ограничители 11, освобождая проход для свечи по мере ее движения между пальцами 9 магазина 8 для удержания свечей. Ограничители 11 после отклонения возвращаются в исходное положение под действием силы тяжести. Ограничители 11 нужны для удержания свечей в магазине и исключения их выпадения из него.
Подвижный модуль 12 представляет собой устройство 14 для нажатия на рычаги, перемещаемое в линейном направлении вдоль направляющей 15.
В частных вариантах реализации устройство 14 для нажатия на рычаги может представлять собой пневмоцилиндр/гидроцилиндр/электроцилиндр (см. фиг. 18) или приводной кулачок (см. фиг. 19, 20) или кулачок с зубчатым колесом (см. фиг. 21, 22) или исполнительный механизм (см. фиг. 23), а направляющая 15 может представлять собой балку (см. фиг. 18-20), зубчатую рейку (см. фиг. 21, 22) или ременную передачу (см. фиг. 23).
На основании данных о положении и состоянии элеватора (положение метки) в вычисленный момент времени средствами управления (компьютером) принимается решение о начале движения верхнего робота 4 с предварительно захваченным верхним концом 6 свечи от точки ожидания к точке, достижение которой захватом соответствует попаданию свечи в зев элеватора 7.
Открываются створки элеватора 7, верхний конец 6 свечи, удерживаемый верхним роботом, перемещается в элеватор 7. При этом нижний робот придерживает свечу, как было указано ранее. Происходит закрытие створок элеватора 7.
Вычисление момента времени для начала движения к элеватору происходит исходя из учёта прогноза прибытия элеватора 7 в точку захвата им свечи. При этом принимается в расчет возможность изменения движения верхнего робота 4 со свечой как до полной остановки (оставляется запас времени и расстояния для торможения), так и его ускорение. Также возможно движение верхнего робота 4 в обратную сторону.
По мере продвижения элеватора 7 система компьютерного зрения по меткам корректирует прогноз прибытия в нужную точку элеватора 7. С учётом обновленных данных корректируется движение верхнего и нижнего роботов. В случае обнаружения раскачивания элеватора 7 дается команда на замедление движения роботов (вплоть до остановки). После остановки раскачивания движение продолжается.
Возможна установка свечи в движущийся элеватор 7 с целью сокращения времени операции, когда тот находится в зоне завершения движения.
Для получения данных о положении и состоянии элеватора могут использоваться такие оптические системы как трекинг по меткам (инфракрасные метки, световозвращающие метки, контрастные метки, qr-коды), при этом метки могут размещаться на створках, корпусе элеватора, движущихся частях верхнего привода. В качестве вспомогательных методов могут выступать лидар и распознавание объектов на изображениях.
Этап 3. Перемещение нижнего конца свечи из зоны на полу буровой в зону над муфтой другой свечи, с которой будет соединяться эта свеча.
После закрытия створок элеватора 7, верхний робот 4 открывает захват 5, отпуская верхний конец 6 свечи, и начинает движение к следующей свече в магазине.
Лебедка продолжает подъем элеватора 7. Элеватор 7 скользит по свече до упора в расширяющуюся часть свечи (замковая муфта - фланец с внутренней конической резьбой на верхнем конце свечи), и свеча начинает подниматься.
Во время подъема свечи средства управления с заданной периодичностью, например каждые 0,003-0,010 секунды, предпочтительно каждые 0,004 секунды, определяют значение высоты подъема свечи (y) и перемещают захват нижнего робота 1 вместе с нижним концом 3 свечи в горизонтальной плоскости в заранее заданные координаты (x, z), соответствующие определенному значению высоты подъема свечи (y).
Таким образом, нижний робот 1 сопровождает нижний край 3 свечи к скважине, управляя перемещением захвата 2 по заданной траектории, чтобы подвести замковый ниппель этой свечи (фланец с внешней конической резьбой на нижнем конце свечи) из зоны на полу буровой к зоне над замковой муфтой ранее опущенной свечи в составе колонны.
Планирование траектории перемещения конца ниппеля свечи из зоны на полу буровой в зону над торцом муфты.
Перед операциями возможно откалибровать робота на вертикальном подъеме свечи и получить циклограмму разгона и торможения лебедки. На основе этих данных можно выбрать наиболее рациональную траекторию перемещения свечи.
Когда лебедка с элеватором начинает поднимать свечу, одновременно производится подъем захвата нижнего робота 1, который ее удерживает. С помощью прямой кинематики нижнего робота 1 измеряется высота его подъема, по рассчитанной траектории определяется координата в горизонтальной плоскости, которая соответствует данной высоте, и захват робота перемещается в горизонтальной плоскости в эту точку, то есть каждой координате по высоте (y) нижнего робота в заранее заложенной траектории соответствуют координаты в горизонтальной плоскости (x, z), в которых он должен быть. Каждые 0,004 секунды робот проверяет на какой он высоте, определяет, где он должен быть по горизонтали и перемещается туда, одновременно смещая свечу, которую он удерживает.
Положение ниппеля свечи рассчитывается из прямой кинематики нижнего робота, на основании известной длины его узлов и их перемещения.
Свеча не может скользить вертикально вверх-вниз относительно захвата нижнего робота 1, что позволяет всегда знать точное положение свечи по вертикали.
При опускании ниппеля свечи в муфту можно получить дополнительную обратную связь о том, где свеча находится в каждый момент времени и когда она оперлась конусом ниппеля на муфту.
Далее лебедка медленно опускает свечу вниз, нижний робот 1 с помощью обратной кинематики контролирует спуск (центрирует конус ниппеля в конус муфты) и подает команду для остановки, когда нижний край опустится достаточно для начала скручивания с колонной. После этого происходит открытие захвата нижнего робота 1, и он перемещается к следующей свече. Начинается процесс скручивания свечи с колонной.
В процессе перемещения свечи к скважине возможно проведение операции по очистке, контролю и смазке резьбы ниппеля свечи.
Во время операции подъема элеватора для забора новой свечи возможна операция по очистке, контролю и смазке муфты уже установленной и спущенной в скважину свечи.
Настоящее изобретение обеспечило повышение безопасности и надёжности осуществления спускоподъемных операций, снижение требований к используемому оборудованию и сокращение времени на осуществление спускоподъемных операций.
Описанные примеры осуществления приведены исключительно в целях иллюстрации. Специалисту будет очевидно, что возможны и иные варианты осуществления без изменения сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУРОВАЯ УСТАНОВКА | 2013 |
|
RU2541972C2 |
| Буровая установка | 1982 |
|
SU1046467A1 |
| Буровая установка для бурения с плавучего средства | 1980 |
|
SU939715A1 |
| Автомат для спуско-подъемных операций в бурении | 1974 |
|
SU629314A1 |
| ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ СПУСКА-ПОДЪЕМА ТРУБ | 2018 |
|
RU2774268C2 |
| Элеватор | 1987 |
|
SU1460185A1 |
| Устройство для вертикального размещения труб на буровой вышке | 1989 |
|
SU1730422A1 |
| БУРОВАЯ УСТАНОВКА | 1995 |
|
RU2100565C1 |
| Устройство для перемещения труб в штангоприемник буровой вышки | 1989 |
|
SU1740615A1 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ПРОВЕДЕНИЯ СПУСКОПОДЪЕМНЫХ ОПЕРАЦИЙ | 2009 |
|
RU2505661C2 |


Группа изобретений относится к системе управления буровыми роботами для спускоподъемных операций при бурении и способу ее работы. Система буровых роботов для спускоподъемных операций включает нижний робот, имеющий захват, выполненный с возможностью удерживать нижний конец свечи и регулировать его положение в горизонтальной плоскости, верхний робот, имеющий захват, выполненный с возможностью удерживать верхний конец свечи и регулировать его положение в горизонтальной плоскости, элеватор, выполненный с возможностью регулировать высоту подъема свечи, магазин для удержания свечей, средства управления, выполненные с возможностью управления положением элеватора, нижнего робота и верхнего робота. Средства управления выполнены с возможностью с заданной периодичностью определять значение высоты подъема свечи и перемещать захват нижнего робота вместе с нижним концом свечи в горизонтальной плоскости в заранее заданные координаты, соответствующие определенному значению высоты подъема свечи. Техническим результатом является повышение безопасности и надёжности осуществления спускоподъемных операций, снижение требований к используемому оборудованию и сокращение времени на осуществление спускоподъемных операций. 2 н. и 9 з.п. ф-лы, 23 ил.
1. Система буровых роботов для спускоподъемных операций, включающая
нижний робот, имеющий захват, выполненный с возможностью удерживать нижний конец свечи и регулировать его положение в горизонтальной плоскости,
верхний робот, имеющий захват, выполненный с возможностью удерживать верхний конец свечи и регулировать его положение в горизонтальной плоскости,
элеватор, выполненный с возможностью регулировать высоту подъема свечи,
магазин для удержания свечей,
средства управления, выполненные с возможностью управления положением элеватора, нижнего робота и верхнего робота,
отличающаяся тем, что
средства управления выполнены с возможностью с заданной периодичностью определять значение высоты подъема свечи (y) и перемещать захват нижнего робота вместе с нижним концом свечи в горизонтальной плоскости в заранее заданные координаты (x, z), соответствующие определенному значению высоты подъема свечи (y).
2. Система по п. 1, отличающаяся тем, что магазин для удержания свечей имеет пальцы и оснащенные рычагами ограничители, причем рычаги выполнены с возможностью под воздействием на них подвижного модуля последовательно отклонять ограничители, освобождая проход для свечи по мере ее движения, при этом подвижный модуль выполнен с возможностью приводиться в движение средствами управления при заданном положении верхнего робота, а ограничители выполнены с возможностью после отклонения возвращаться в исходное положение под действием силы тяжести.
3. Система по п. 1, отличающаяся тем, что подвижный модуль представляет собой устройство для нажатия на рычаги, перемещаемое в линейном направлении вдоль направляющей.
4. Система по п. 1, отличающаяся тем, что подвижный модуль представляет собой пневмоцилиндр, гидроцилиндр, электроцилиндр или приводной кулачок, перемещаемый вдоль направляющей.
5. Система по п. 1, отличающаяся тем, что подвижный модуль представляет собой кулачок с зубчатым колесом, перемещаемый вдоль зубчатой рейки, или исполнительный механизм, перемещаемый на ременной передаче.
6. Система по п. 1, отличающаяся тем, что захват нижнего робота шарнирно соединен с нижним роботом, а захват верхнего робота шарнирно соединен с верхним роботом.
7. Способ управления системой буровых роботов для спускоподъемных операций, включающей
нижний робот, имеющий захват, выполненный с возможностью удерживать нижний конец свечи и регулировать его положение в горизонтальной плоскости,
верхний робот, имеющий захват, выполненный с возможностью удерживать верхний конец свечи и регулировать его положение в горизонтальной плоскости,
элеватор, выполненный с возможностью регулировать высоту подъема свечи,
магазин для удержания свечей,
средства управления, выполненные с возможностью управления положением элеватора, нижнего робота и верхнего робота,
при этом способ включает этапы:
a) захватом верхнего робота передвигают верхний конец свечи из магазина для удержания свечей в зону для зацепления с элеватором, причем после зацепления верхнего конца свечи с элеватором верхний робот отпускает верхний конец свечи,
b) с помощью элеватора поднимают верхний конец свечи на заданную высоту подъема свечи,
при этом во время подъема свечи средства управления с заданной периодичностью определяют значение высоты подъема свечи (y) и перемещают захват нижнего робота вместе с нижним концом свечи в горизонтальной плоскости в заранее заданные координаты (x, z), соответствующие определенному значению высоты подъема свечи (y).
8. Способ по п. 7, отличающийся тем, что во время этапа a) захват нижнего робота обеспечивает нахождение нижнего конца свечи в заданной зоне на полу буровой.
9. Способ по п. 7, отличающийся тем, что магазин для удержания свечей имеет пальцы и оснащенные рычагами ограничители, причем рычаги под воздействием на них подвижного модуля последовательно отклоняют ограничители, освобождая проход для свечи по мере ее движения, при этом подвижный модуль приводится в движение средствами управления при заданном положении верхнего робота, а ограничители после отклонения возвращаются в исходное положение под действием силы тяжести.
10. Способ по п. 7, отличающийся тем, что до этапа a) нижний робот используют для контроля смазки муфты, с которой будет соединяться свеча, и определения координат муфты.
11. Способ по п. 7, отличающийся тем, что верхний робот начинает передвижение свечи из магазина для удержания свечей в зону для зацепления с элеватором на основании полученных данных о положении и состоянии элеватора.
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |
| ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ СПУСКА-ПОДЪЕМА ТРУБ | 2018 |
|
RU2774268C2 |
| Устройство для осуществления спуско-подъемных операций при бурении | 1961 |
|
SU142969A1 |
| БУРОВОЙ СТАНОК | 2021 |
|
RU2760657C1 |
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |

