Изобретение относится к области беспилотных летательных аппаратов и оборудования для них, предназначено для транспортировки грузов различного вида и назначения.
В последние годы беспилотные летательные аппараты приобрели огромную популярность, особенно в наиболее развитых государствах мира. Область применения беспилотников довольно широка. Они активно развиваются, существует большое количество разновидностей этих аппаратов и продолжается создание новых и совершенствование уже существующих. Беспилотные летательные аппараты активно используются в различных сферах деятельности. В военном деле их используют для разведки, корректировки огня и нанесения ударов, съемки координат объектов противника, замера расстояний и площадей, они хорошо зарекомендовали себя в различных военных конфликтах.
В этой связи все большее внимание уделяется характеристикам беспилотных летательных аппаратов, их универсальности, возможности выполнять широкий спектр задач в течение длительного времени, возможность контролировать обстановку и доставлять грузы с различными массогабаритными характеристиками на большие расстояния.
Известна система спасения на водных бассейнах (патент RU № 2326019 от 2008 г. ), содержащая дирижабль с подъемно-спусковым механизмом и соединенный с последним контейнер, имеющий основание и ограждение. Основание контейнера выполнено в виде плота, состоящего из двух вертикально расположенных друг над другом секций, причем верхняя секция выполнена надувной и в ней установлен воздушный насос с электроприводом с возможностью наполнения этой секции воздухом как на поверхности водного бассейна, так и под ней, а в нижней секции установлен водяной насос с электроприводом с возможностью наполнения этой секции водой и слива из нее воды как на поверхности водного бассейна, так и под ней, при этом контейнер соединен с подъемно-спусковым механизмом посредством гибкого рукава, в котором проложены электрокабели для питания и управления указанными электроприводами из дирижабля.
Недостатком этого устройства является отсутствие возможности автоматической загрузки и выгрузки различного вида грузов.
Также известна система транспортировки груза (патент RU № 2797077 от 2023 г.), содержащая вычислитель и устройство для транспортировки груза, выполненное с возможностью прикрепления к летательному аппарату и содержащее лебедку, центрирующее устройство и трос, при этом: лебедка выполнена с возможностью сматывания и разматывания троса и содержит привод и катушку троса, при этом катушка троса выполнена с возможностью размещения на своей поверхности троса, привод выполнен с возможностью придания вращения катушке троса; центрирующее устройство выполнено с возможностью позиционирования и удержания груза и содержит корпус, захваты-фиксаторы и привод захватов, при этом каждый захват-фиксатор в верхней своей части соединен с корпусом центрирующего устройства с возможностью вращения вокруг него, нижняя часть захвата-фиксатора выполнена с возможностью фиксации устройства для подвеса груза, привод захватов соединен с захватами-фиксаторами и выполнен с возможностью приведения в движение захватов-фиксаторов по команде вычислителя для фиксации и высвобождения устройства для подвеса груза.
Недостатком этого устройства является использования только способа транспортировки грузов вывешенных на тросе, что увеличивает требования по мощности и надежности к лебедке и тросу и ухудшает аэродинамические свойства системы в полете.
Наиболее близкой по технической сущности к заявленному изобретению является БПЛА T400/TRV400 (производства английской компании Malloy Aeronautics), представляющий собой передовое технологическое решение в области автономных грузовых беспилотников с возможностью тяжеловесной перевозки. Это устройство разработано таким образом, чтобы удовлетворять потребности войск на поле боя, предоставляя им все необходимое для успешного выполнения задач: от еды и воды до запчастей, оборудования, оружия и боеприпасов. Сокращение TRV, использованное в названии модели, расшифровывается как «Тактическое Транспортное Средство» (Tactical Resypply Vehicle), что подчеркивает его первостепенное назначение - оперативная и эффективная доставка грузов в условиях боевых действий. Основные технологические особенности Т400 включают в себя системы, способные обнаруживать и избегать препятствия на пути полета, а также системы, обеспечивающие автоматическую посадку в сложных условиях. Что касается технических характеристик, Т400 может развивать крейсерскую скорость в 126 км/ч, что эквивалентно 78 милям в час. При этом его максимальная грузоподъемность достигает 180 кг. Если говорить о дальности полета, то при полной загрузке он может преодолеть расстояние в 19 км. Однако без дополнительного груза эта дистанция значительно увеличивается, составляя более 70 км.
На данном воздушном аппарате установлены четыре пары пропеллеров, расположенных вертикально один над другим. Эти пропеллеры крепятся к раме самолета с помощью специальных стропил, наклоненных под углом в 45 градусов и расположенных в каждом из четырех углов машины. Всего в конструкции восемь электромоторов, которые получают электроэнергию от батарей. Аккумуляторы имеют возможность быстрой замены: персонал может легко извлечь разряженный аккумулятор и заменить его на полностью заряженный, что существенно сокращает время простоя между заданиями. Для посадки аппарата предусмотрено неподвижное шасси, напоминающее лыжи.
Недостатком этого устройства является отсутствие возможности осуществлять автоматическую дистанционную погрузку и выгрузку различных грузов, в том числе и эвакуацию одиночных раненых в бессознательном состоянии.
Задачей изобретения является создание беспилотного летающего аппарата, обладающего возможностью обнаруживать и огибать препятствия на пути полета, обеспечивающего автоматическую посадку в сложных условиях, дистанционную автоматическую погрузку и выгрузку различных грузов, в том числе одиночных раненых, находящихся в бессознательном состоянии.
Техническим результатом является расширение возможностей беспилотного летающего аппарата по автоматизации доставки и эвакуации широкого спектра различных грузов.
Требуемый технический результат достигается тем, что беспилотный летательный аппарат для эвакуации раненых и доставки грузов, содержит четыре пары электромоторов с пропеллерами, расположенных вертикально один над другим. Электромоторы прикреплены к раме с помощью стропил в каждом из четырех углов. Питание электромоторов электроэнергией осуществляется от аккумуляторных батарей. Обеспечивается возможность пополнения заряда аккумуляторных батарей от солнечных батарей расположенных на верхней поверхности летательного аппарата. Беспилотный летательный аппарат дополнительно оборудован блоками систем управления и радиосвязи, системой спутниковой навигации ГЛОНАСС, оптическими и тепловизионными средствами наблюдения. Также беспилотный летательный аппарат для эвакуации раненых и доставки грузов оборудован электролебедкой с тросом и крюк-кошкой для подъема имущества и раненых из окопа и складок местности. Неподвижное шасси беспилотного летательного аппарата представляет собой каркас трапециевидной формы с двумя полозьями. На одном полозе в средней части располагается реверсивный электродвигатель с валом в обе стороны, имеющим в вырезах зубчатые колеса для перемещения перфорированных направляющих, имеющих на конце ролик, с противоположной стороны полоз имеет вырезы, оборудованные электронным устройством фиксации и освобождения.
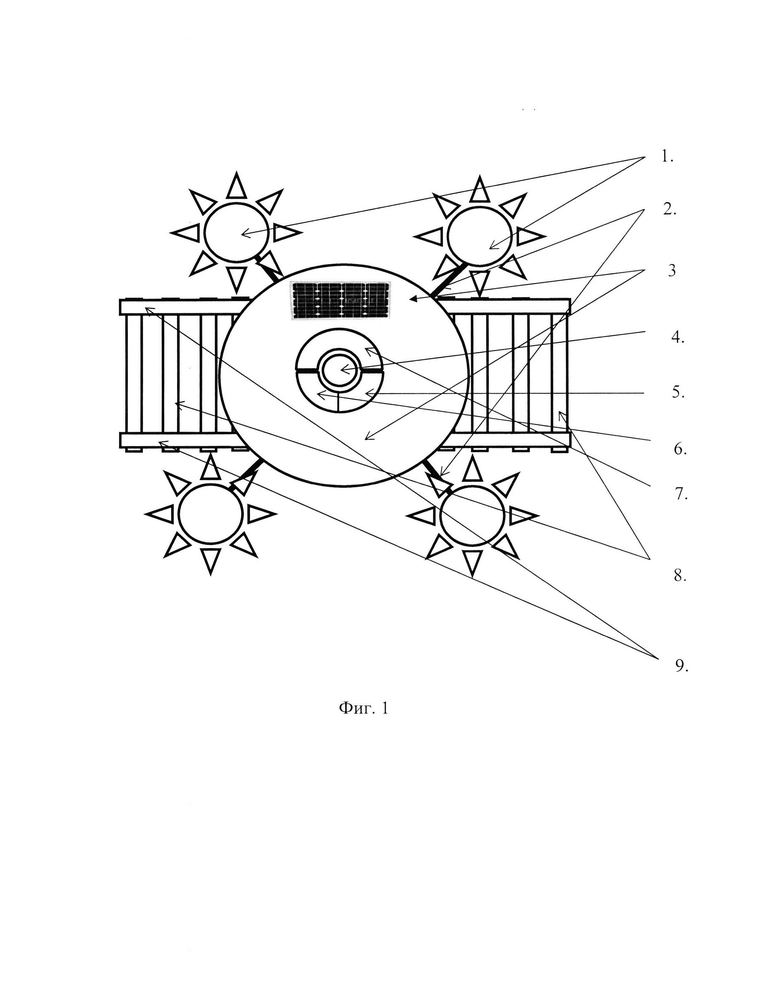
Сущность изобретения поясняется чертежом, где на Фиг. 1 представлена схема беспилотного летательного аппарата для эвакуации раненых и доставки грузов (вид сверху), где:
1 - электромоторы с пропеллерами;
2 - стропила;
3 - солнечные батареи;
4 - камера наблюдения за верхней полусферой;
5 - блок системы ГЛОНАСС;
6 - блок системы радиосвязи;
7 - блок системы управления;
8 - перфорированные направляющие;
9 - полозья.
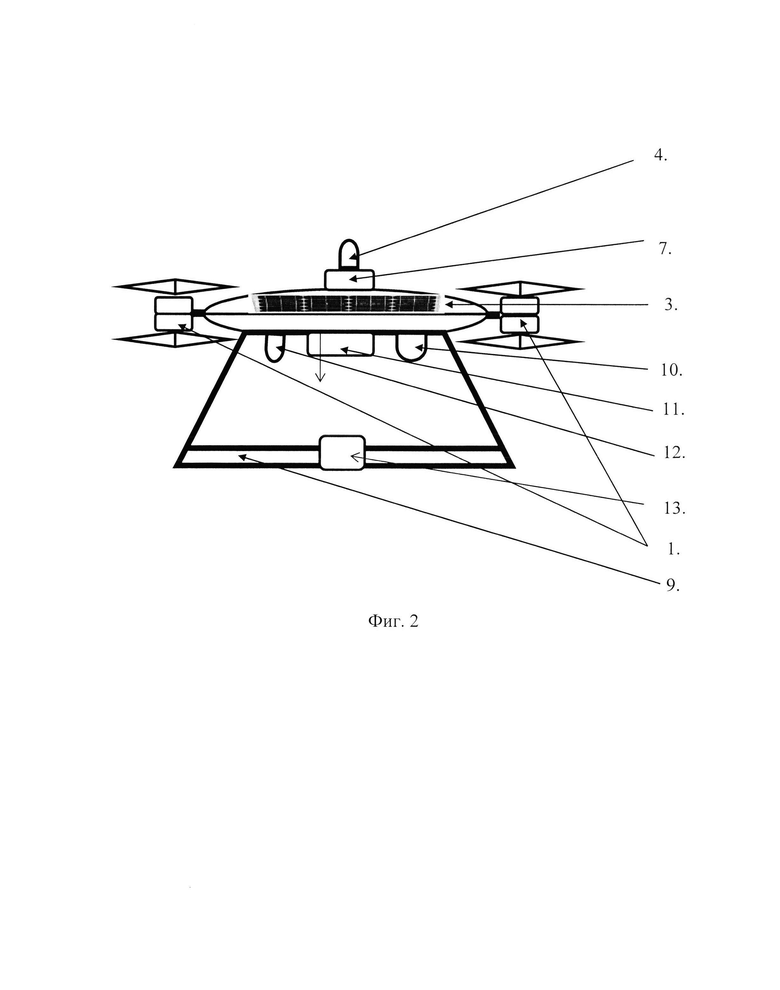
На Фиг. 2 так же представлена схема беспилотного летательного аппарата для эвакуации раненых и доставки грузов, где:
10 - тепловизионная камера;
11 - электролебедка с тросом и крюк-кошкой;
12 - камера наблюдения за нижней полусферой;
13 - реверсивный электродвигатель.
Изобретение работает следующим образом: с получением информации о необходимости транспортировки беспилотного летательного аппарата для эвакуации раненых и доставки грузов осуществляется перелет к месту загрузки. Существует возможность различных видов загрузки с участием человека или в автоматическом режиме.
В первом случае подготовленные специалисты размещают тот или иной вид груза на поверхности, образуемой зафиксированными перфорированными направляющими (8) между полозьями (9). Беспилотный летательный аппарат для эвакуации раненых и доставки грузов по команде оператора из пункта управления, поступающей через блок системы радиосвязи (6) на блок системы управления (7) взлетает и осуществляет перелет в точку доставки груза по маршруту под управлением оператора или по заранее загруженной программе. Полет осуществляется по информации, получаемой от блока системы спутниковой навигации ГЛОНАСС (5) и имеющихся камер наблюдения за верхней полусферой (4) и за нижней полусферой (12), а так же тепловизионной камеры (10). Выгрузка производится с использованием человека или в автоматическом режиме.
Для загрузки в автоматическом режиме беспилотный летательный аппарат для эвакуации раненых и доставки грузов осуществляет зависание над грузом. По команде оператора через блок системы радиосвязи (6) на блок системы управления (7) осуществляется освобождение от фиксации перфорированных направляющих (8) между полозьями (9). Производится запуск реверсивного электродвигателя (13) и перемещение перфорированных направляющих (8) вращением зубчатых колес на валу реверсивного электродвигателя (13) на открытие пространства между полозьями (9). Летательный аппарат осуществляет посадку, так чтобы груз находился между полозьями (9). Снова производится запуск реверсивного электродвигателя (13) и перемещение перфорированных направляющих (8) вращением зубчатых колес на закрытие пространства между полозьями (9). За счет мощности реверсивного электродвигателя (13), гибкости, прочности и малого сечения перфорированных направляющих (8) и наличия на конце ролика они продавливаются под грузом до противоположного полоза и фиксируются электронным устройством фиксации. При необходимости груз можно приподнять, используя лебедку с тросом и крюк-кошкой (11). Далее беспилотный летательный аппарат для эвакуации раненых и доставки грузов осуществляет перелет и выгрузку в обратной последовательности работы механизмов. Процесс загрузки и выгрузки контролируется через камеру наблюдения за нижней полусферой (12).
Для эвакуации раненных с линии боевого соприкосновения беспилотный летательный аппарат для эвакуации раненых и доставки грузов на небольшой высоте направляется к месту предполагаемого нахождения под управлением оператора. Используя камеру наблюдения за нижней полусферой (12) и тепловизионную камеру (10) осуществляется поиск и обнаружение. С помощью тепловизионной камеры (10) определяется состояние раненого по наличию теплового портрета. В случае обнаружения раненого он, при наличии физической возможности самостоятельно перемещается на перфорированные направляющие (8) между полозьями (9). В случае, когда раненый не может самостоятельно перемещаться, находится в бессознательном состоянии, загрузка осуществляется в автоматическом режиме. Беспилотный летательный аппарат для эвакуации раненых и доставки грузов осуществляет зависание над грузом. По команде оператора через блок системы радиосвязи (6) на блок системы управления (7) осуществляется освобождение от фиксации перфорированных направляющих (8) между полозьями (9). Производится запуск реверсивного электродвигателя (13) и перемещение перфорированных направляющих (8) вращением зубчатых колес на валу реверсивного электродвигателя (13) на открытие пространства между полозьями (9). Летательный аппарат осуществляет посадку, так чтобы раненый находился между полозьями (9). Снова производится запуск реверсивного электродвигателя (13) и перемещение перфорированных направляющих (8) вращением зубчатых колес на закрытие пространства между полозьями (9). За счет мощности реверсивного электродвигателя (13), прочности и малого сечения перфорированных направляющих (8) и наличия на конце ролика, они продавливаются под раненым до противоположного полоза и фиксируются электронным устройством фиксации. Такой способ загрузки имеет место быть при нахождении раненого на ровной поверхности.
При нахождении раненого в окопе, или каких либо других складках местности необходимо переместить его на ровную поверхность. Для этого используется электролебедка с тросом и крюк-кошкой (11). С помощью нее осуществляется зацепление раненого за имеющийся карабин или за амуницию или одежду. Далее подъем и перенос на ровную площадку для загрузки, так как описано выше. Полет с раненым с линии боевого соприкосновения должен осуществляется на небольшой высоте для предотвращения обнаружения противником.
Беспилотный летательный аппарат для эвакуации раненых и доставки грузов представляет собой технологическое решение в области грузовых беспилотников с возможностью тяжеловесной перевозки, особенно в труднодоступной местности. Имеет возможность удовлетворять потребности во многих областях: промышленности, сельском хозяйстве, военном деле. В военном деле непосредственно на поле боя позволяет предоставлять все необходимое для успешного выполнения задач: продовольствие, запасные части, оборудование, оружие, боеприпасы и др. При необходимости может использоваться и для применения различных видов оружия.
Беспилотный летательный аппарат для эвакуации раненых и доставки грузов расширяет возможности по охране государственной границы Российской Федерации. Прежде всего, его применением может быть обеспечено оперативное снабжение всем необходимым удаленных от транспортных коммуникаций объектов. Кроме того, появляется возможность с помощью устанавливаемых собственных средств не летального действия или применения их с другого беспилотного летательного аппарата обездвиживать нарушителя с последующей его загрузкой и эвакуацией. Это обеспечит не только оперативное обнаружение нарушителя, но и его задержание, что особенно актуально для протяженных, географически сложных участков государственной границы. Позволит экономить значительные людские и материальные ресурсы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аэромобильная система воздушного наблюдения | 2022 |
|
RU2782479C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| Многоцелевой комбинированный беспилотный летательный аппарат | 2024 |
|
RU2831435C1 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ТЕХНИЧЕСКОЙ РАЗВЕДКИ | 2023 |
|
RU2813930C2 |
| Система доставки груза горнодобывающим субъектом на место проведения взрывных работ (варианты) | 2024 |
|
RU2839710C1 |
| Привязная территориально распределенная воздушная система технического наблюдения | 2024 |
|
RU2828468C1 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ТУШЕНИЯ ПОЖАРОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2826399C2 |
| Способ применения БПЛА и система осуществления способа | 2023 |
|
RU2828920C1 |
Изобретение относится к области беспилотных летательных аппаратов (БПЛА) и оборудования для них, предназначено для транспортировки грузов различного вида и назначения. БПЛА содержит четыре пары электромоторов с пропеллерами, расположенных вертикально один над другим. Электромоторы прикреплены к раме с помощью стропил в каждом из четырех углов. Питание электромоторов электроэнергией осуществляется от аккумуляторных батарей. Обеспечивается возможность пополнения заряда аккумуляторных батарей от солнечных батарей, расположенных на верхней поверхности ЛА. БПЛА дополнительно оборудован блоками систем управления и радиосвязи, системой спутниковой навигации ГЛОНАСС, оптическими и тепловизионными средствами наблюдения. БПЛА оборудован электролебедкой с тросом и крюк-кошкой для подъема имущества и раненых из окопа и складок местности. Неподвижное шасси БПЛА представляет собой каркас трапециевидной формы с двумя полозьями. На одном полозе в средней части располагается реверсивный электродвигатель с валом в обе стороны, имеющим в вырезах зубчатые колеса для перемещения перфорированных направляющих, имеющих на конце ролик, с противоположной стороны полоз имеет вырезы, оборудованные электронным устройством фиксации и освобождения. 2 ил.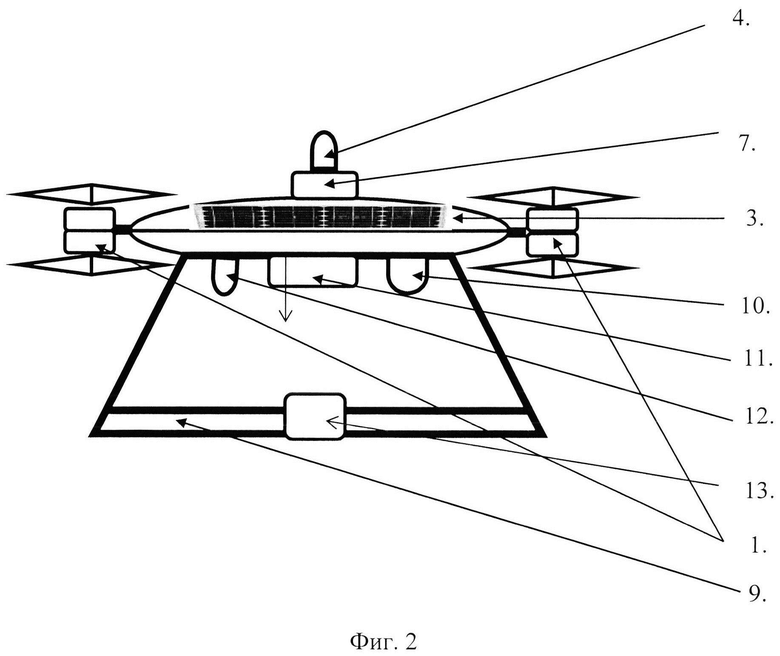
Беспилотный летательный аппарат для эвакуации раненых и доставки грузов, содержащий четыре пары электромоторов с пропеллерами, расположенных вертикально один над другим, прикрепленных к раме с помощью стропил, где электромоторы получают электроэнергию от аккумуляторных батарей, отличающийся тем, что верхняя поверхность дополнительно оборудована солнечными батареями, блоками системы управления, системы радиосвязи, системы спутниковой навигации ГЛОНАСС, кроме того, оборудован оптическими и тепловизионными средствами наблюдения, электролебедкой с тросом и крюк-кошкой, неподвижным шасси, представляющим собой каркас с двумя полозьями, на одном полозе в средней части располагается реверсивный электродвигатель с валом в обе стороны, имеющим в вырезах зубчатые колеса для перемещения перфорированных направляющих, имеющих на конце ролик, с противоположной стороны полоз имеет вырезы, оборудованные электронным устройством фиксации.
| Способ фотографической записи звуковых колебаний | 1922 |
|
SU400A1 |
| Военное обозрение, 03.09.2022 | |||
| ЛЕНТА ЛЕНТОЧНОГО КОНВЕЙЕРА | 0 |
|
SU201203A1 |
| СИСТЕМА ТРАНСПОРТИРОВКИ ГРУЗА | 2022 |
|
RU2797077C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНТЕГРАЛЬНЫХ ХАРАКТЕРИСТИК ПЕРЕМЕННЫХ НАПРЯЖЕНИЙ И МОЩНОСТИ В ИНТЕРВАЛ ВРЕМЕНИ | 1967 |
|
SU222735A1 |
| ТРАНСПОРТНЫЙ ГРУЗОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2776617C1 |
| CN 112478157 A, 12.03.2021. | |||

