Изобретение относится к робототехнике и может быть использовано в качестве мобильной роботизированной платформы в составе автоматизированных комплексов, предназначенных для очистки и технологической подготовки поверхностей крупногабаритных изделий с последующим нанесением на них различных покрытий. Сфера применения таких комплексов – корпуса и палубные надстройки речных и морских судов, крупногабаритное технологическое оборудование нефтегазовых и нефтехимических предприятий, строительные конструкции и др. Конструктивные особенности заявленного устройства упрощают управление роботизированными средствами для обработки поверхности, увеличивают их маневренность, что позволяет перемещать технологический инструмент в любом направлении вдоль обрабатываемой поверхности без промежуточных технологических операций, что в свою очередь, способствует улучшению качества обрабатываемой поверхности.
Известно Устройство для очистки корпусов судов RU 2706267 C1 от 11.04.2019, которое состоит из рамы в форме прямоугольного параллелепипеда, шести внутренних управляемых приводами лебедок с намотанными на них тросами, свободные концы которых прикреплены к корпусу рабочего механизма, перемещаемого в пространстве рамы с их помощью, к верхней горизонтальной конструкции ребра рамы, расположенной вдоль борта судна, прикреплены два троса, которые намотаны на барабан тяговой лебедки, расположенной на борту судна и имеющей механизм перемещения ее вдоль этого борта, в корпус рабочего механизма помещен привод вращения, выходной вал которого жестко связан с вращающимся рабочим инструментом, в нижней части рамы установлены управляемые шарниры, с внешней стороны к этим шарнирам с возможностью вращения относительно вертикальных осей прикреплены движители, на двух ближайших от борта судна вертикальных конструкциях ребер закреплены электромагниты, расположенные между этими конструкциями и бортом судна, причем каждый из электромагнитов первой пары, расположенной в горизонтальной плоскости, прикреплен к самой верхней части рамы, соответствующим ему стержнем, каждый из этих стержней имеет возможность телескопического изменения их длины посредством встроенных в них электроприводов и соединяется со своим электромагнитом шарнирно, а вторая горизонтально расположенная пара электромагнитов установлена на одинаковом расстоянии по вертикали от соответствующих магнитов первой пары, но выше нижней горизонтальной плоскости рамы, и жестко закреплена на соответствующих вертикальных конструкциях рамы. Для того чтобы осуществить очистку корпуса судна необходимо сначала произвести позиционирование и закрепить описываемое устройство на корпусе судна. Позиционирование осуществляется с помощью тяговой лебедки путем наматывания или разматывания тросов и перемещения тяговой лебедки вдоль борта судна, соединенных с рамой устройства. Закрепление устройства осуществляется с помощью четырех электромагнитов, размещенных на раме устройства. Компенсация кривизны поверхности корпуса судна осуществляется путем выдвижения телескопических стержней, которые имеются у двух верхних электромагнитов. Очистка поверхности корпуса судна осуществляется путем вращения и перемещения рабочего инструмента внутри рамы устройства, вращение рабочего инструмента осуществляется приводом с помощью внутренних управляемых лебедок, а перемещение внутри рамы – шестью внутренними управляемыми лебедками путем изменением длины тросов, соединяющих лебедки с корпусом рабочего механизма. Таким образом, за одну установку устройства выполняется очистка участка поверхности, ограниченного габаритами рамы. Чтобы осуществить следующий цикл очистки, необходимо снова произвести позиционирование и закрепление устройства на борту судна. Такой алгоритм работы устройства существенно увеличивает время, необходимое для очистки всей поверхности корпуса судна. Кроме того, система перемещения и позиционирования рабочего механизма внутри рамы является довольно сложной и малонадежной, так как требует согласованной работы под водой всех шести лебедок одновременно. Предложенное устройство затруднительно использовать на поверхностях с большой кривизной, так как возможность закрепления устройства на таких поверхностях ограничена длиной телескопических стержней электромагнитов.
Наиболее близким по технической сущности к достигаемому результату является транспортное средство WO 2000010864A1, способное перемещаться в направлении, пересекающем основное направление движения, т. е. способное двигаться боком, а также способное присасываться к рабочей поверхности, на которой осуществляется движение, такой как поверхность стены, под действием давления окружающей жидкости или воздуха и двигаться по этой поверхности. Транспортные средства, движущиеся таким образом, используются для снятия старых покрытий с поверхности крупных конструкций, таких как корпуса, различные цистерны и опоры, для покраски и выполнения подводных работ по очистке корпусов судов. Известное транспортное средство содержит воспринимающий давление основной корпус, имеющий в целом форму цилиндра и изготовленный из жесткого или полужесткого материала, такого как сталь; выступающие наружу опорные элементы, закрепленные на противоположных участках боковой стенки основного корпуса; две опорные рамы, прикрепленные к опорным элементам; установленные на опорных рамах ведущие колеса (в приведенном описании по два на каждую опорную раму); два электродвигателя, установленные на опорные рамы и передающие вращение каждой паре колес посредством цепной передачи; эластичную перегородку, имеющую в целом кольцевую форму и прикрепленную одной стороной к кольцевой пластине основного корпуса, а другой стороной контактирующую с рабочей поверхностью, по которой осуществляется движение транспортного средства, и выполненную из эластичного материала, такого как полиуретановый каучук, и способную упруго деформироваться в направлении рабочей поверхности и от нее; средство создания пониженного давления, роль которого может выполнять насос, инжектор, дренажный насос и т.д., которое создает пониженное давление в пространстве, образованном принимающим давление основным корпусом, рабочей поверхностью, по которой движется транспортное средство и эластичной перегородкой; соединительную трубу, расположенную на боковой стенке основного корпуса; всасывающий шланг, соединенный одним концом с соединительной трубой, а другим – со средством создания пониженного давления; четыре вспомогательные приводные ходовые средства, расположенные на концах опорных рам вблизи ведущих колес и состоящие из цилиндров, имеющих предотвращающие вращение штоков механизмы; ведомые колеса, установленные на концах штоков цилиндров вспомогательных приводных ходовых средств таким образом, чтобы их оси вращения были перпендикулярны осям вращения ведущих колес, при этом ведомые колеса могут входить и выходить в зацепление с рабочей поверхностью за счет перемещения штоков цилиндров. Известное транспортное средство работает следующим образом. Когда средство создания пониженного давления работает, действие средства создания пониженного давления вызывает всасывание текучей среды (например, воздуха при использовании в воздухе или воды при использовании, например, в воде) и создает разрежение в пространстве пониженного давления. Текучая среда выводится наружу через всасывающий шланг, тем самым снижая давление внутри зоны снижения давления по мере необходимости. Таким образом, поскольку эластичная перегородка изготовлена из относительно гибкого материала, окружающее давление жидкости или воздуха, действующее на воспринимающий давление основной корпус, из-за перепада давления в области пониженного давления, по существу передается с воспринимающего давление основного корпуса на рабочую поверхность через опорные рамы и установленные на них ведущие колеса, в результате чего транспортное средство прилипает к рабочей поверхности. Окружающее давление среды, действующее на эластичную перегородку из-за разницы давлений между внутренней и внешней частью области пониженного давления, смещает эластичную перегородку к рабочей поверхности и приводит ее концевую часть в контакт с рабочей поверхностью. Когда электродвигатели вращают ведущие колеса, установленные на опорных рамах, в одном и том же направлении, устройство движется прямо (вперед или назад) вдоль рабочей поверхности стены. Когда ведущие колеса, установленные на опорных рамах, приводятся во вращение в противоположных направлениях, устройство вращается (против или по часовой стрелке) вокруг своей оси и ориентируется в требуемом направлении. Смещение транспортного средства параллельно основному направлению движения осуществляется посредством последовательного включения вспомогательных приводных ходовых средств, расположенных на концах опорных рам. Далее опишем процесс такого смещения для варианта, когда транспортное средство движется вверх по рабочей поверхности (взгляд на транспортное средство и поверхность сверху) и необходимо совершить маневр вправо, а затем выровнять транспортное средство параллельно прежнему курсу. Цилиндр одного из вспомогательных приводных средств (в данном примере верхнее правое) опускает шток с установленным на его конце ведомым колесом до контакта с рабочей поверхностью так, чтобы конец опорной рамы приподнялся и ближайшее (в данном случае верхнее правое) ведущее колесо вышло из зацепления с рабочей поверхностью. Ведущие колеса на левой опорной раме, приводятся во вращение двигателем в направлении основного движения, а ведущие колеса на правой опорной раме не приводятся во вращение. Транспортное средство совершает поворот вправо вокруг центра, которым является пятно контакта не вращающегося нижнего правого ведущего колеса с рабочей поверхностью. Направление и траекторию поворота задают вращающиеся ведущие колеса, расположенные на левой опорной раме, находящееся в контакте с рабочей поверхностью ведомое колесо верхнего правого вспомогательного приводного средства и не вращающееся нижнее правое ведущее колесо. Выравнивание транспортного приводного средства осуществляется следующим образом. Цилиндр правого верхнего вспомогательного приводного ходового средства поднимает шток и ведомое колесо выходит из зацепления с рабочей поверхностью, правая опорная рама опускается и верхнее правое ведущее колесо входит в контакт с рабочей поверхностью. Далее цилиндр нижнего правого вспомогательного приводного средства опускает шток, нижнее правое ведомое колесо входит в контакт с рабочей поверхностью, приподнимает правую опорную раму и выводит из зацепления с контактной поверхностью нижнее правое ведущее колесо. Двигатель, расположенный на левой опорной раме, вращает ведущие колеса на левой опорной раме в направлении противоположном основному движению (в данном примере вниз), а ведущие колеса на правой опорной раме не вращаются. Транспортное средство совершает поворот вправо вокруг центра, которым является пятно контакта не вращающегося верхнего правого ведущего колеса с рабочей поверхностью. Направление и траекторию поворота задают вращающиеся ведущие колеса, расположенные на левой опорной раме, находящееся в контакте с рабочей поверхностью ведомое колесо нижнего правого вспомогательного приводного средства и не вращающееся верхнее правое ведущее колесо. После поворота транспортное средство занимает положение параллельное исходному, но с некоторым смещением. Величина смещения определяется геометрией и размерами транспортного средства, а также углом поворота, на который поворачивается транспортное средство при совершении данного маневра. В данном примере описано смещение транспортного средства вправо. Смещение транспортного средства влево осуществляется аналогично, с той лишь разницей, что направление и траекторию движения задают вращающиеся ведущие колеса на правой опорной раме, не вращающиеся ведущие колеса на левой опорной раме и ведомые колеса вспомогательных ходовых средств на левой опорной раме. В соответствии со вторым аспектом изобретения, приведенного в качестве ближайшего аналога, вместо вспомогательных приводных ходовых средств используются вибрационные средства. Вибрационные средства представляют собой пневматические поршневые вибраторы, шток каждого из которых соединен с концами обеих опорных рам, вибрация передается на концы опорных рам посредством возвратно-поступательного движения цилиндров, уменьшая тем самым силу трения ведущих колес, расположенных на концах опорных рам. В описываемом аналоге источником вибраций также могут служить роторные вибрационные механизмы. Смещение транспортного средства с вибрационными средствами параллельно основному направлению движения осуществляется посредством последовательного включения вибрационных средств, расположенных на концах опорных рам. Алгоритм такого маневра в целом аналогичен вышеописанному варианту, с той лишь разницей, что роль вспомогательных приводных средств выполняют вибрационные средства.
Преимуществами вышеприведенного транспортного средства являются компактность, высокие маневренные качества, возможность прилипать к поверхностям из любого материала. Однако данное транспортное средство не лишено ряда недостатков. К недостаткам можно отнести сложность управления транспортным средством при его маневрировании по рабочей поверхности, а также сложность выведения транспортного средства в заданную точку при перемещении боком, так как перемещение осуществляется путем последовательных поворотов транспортного средства. Кроме того, приподнимание опорных рам при маневрировании нарушает расстояние от исполнительного механизма до рабочей поверхности при выполнении операций, для которых важно постоянство этого расстояния, например при окрашивании поверхностей или нанесении полимерного покрытия.
Технический результат, достигаемый заявленным изобретением, заключается в создании транспортного средства, а конкретнее - мобильного роботизированного устройства с высокой степенью универсальности для выполнения различных технологических операций, в том числе по очистке протяженных поверхностей крупногабаритных конструкций и изделий, подготовке поверхностей к нанесению покрытий и последующего нанесения покрытий. Кроме того, предлагаемое техническое решение направлено на повышение маневренности мобильных роботизированных средств с одновременным упрощением управления ими и повышении качества выполняемых работ по очистке и подготовке поверхностей и нанесения покрытий.
Технический результат достигается тем, что мобильное роботизированное устройство для автоматизированной очистки и подготовки поверхностей изделий с последующим нанесением на них покрытий, содержащее корпус, боковую стенку корпуса, ведущие колеса, соединяющиеся с корпусом, эластичную перегородку, имеющую в целом кольцевую форму и прикрепленную одной стороной к боковой стенке корпуса, а другой стороной контактирующую с рабочей поверхностью, при этом эластичная перегородка и рабочая поверхность образуют пространство пониженного давления относительно давления окружающей среды, величина которого достаточна для удержания мобильного роботизированного устройства на рабочей поверхности прижимной силой, создаваемой за счет разницы между давлениями окружающей среды и давлением среды в пространстве пониженного давления, средство создания пониженного давления, в качестве которого использован насос, инжектор или дренажный насос, всасывающий рукав, всасывающий патрубок, расположенный на боковой стенке корпуса, при этом средство создания пониженного давления соединено с пространством пониженного давления через всасывающий патрубок и всасывающий рукав, дополнительно содержит нагнетающий патрубок, проходящий через боковую стенку в пространство пониженного давления, сопло, установленное на конце нагнетающего патрубка в пространстве пониженного давления и нагнетающий рукав, соединенный одним концом с нагнетающим патрубком, а другим концом - с компрессорной станцией, выполненной с возможностью подачи через нее на рабочую поверхность абразивного материала или водяной струи под давлением, обеспечивающим отделение продуктов очистки, отложений, покрытий от рабочей поверхности, при этом мобильное роботизированное устройство выполнено обеспечивающим осуществление очистки рабочей поверхности и отвода продуктов очистки в пространстве пониженного давления без проникновения продуктов очистки в окружающую среду; в каждое ведущее колесо встроен электродвигатель, при этом ведущие колеса являются мотор-колесами, а сами ведущие колеса установлены в корпусе посредством поворотных вилок, которые могут вращаться вокруг своих вертикальных осей; устройство содержит технологический инструмент, модуль управления положением технологического инструмента, датчик положения технологического инструмента, привод технологического инструмента, при этом датчик положения технологического инструмента выполнен с возможностью непрерывного измерения расстояния от технологического инструмента до рабочей поверхности и отправки этих данных в модуль управления положением технологического инструмента, представляющий собой электронное устройство с возможностью подачи команд приводу технологического инструмента на корректировку положения технологического инструмента в случае обнаружения его отклонения от заданного расстояния до рабочей поверхности; устройство содержит систему ориентации ведущих колес, представляющую собой кривошипно-кулисный механизм с двумя двойными поворотными кулисами с приводом системы ориентации ведущих колес, представляющим собой мотор-редуктор с шаговым электродвигателем, передающий посредством зубчатой передачи крутящий момент двум двойным поворотным кулисам, соединенным через кривошипы с ползунами с осями поворотных вилок ведущих колес, и позволяющую мобильному роботизированному устройству совершать плоско-параллельные перемещения по рабочей поверхности, при этом угол поворота ведущих колес определяется углом поворота поворотных кулис, который задается количеством шагов, на которые повернется шаговый электродвигатель мотор-редуктора привода системы ориентации ведущих колес; устройство содержит систему ориентации ведущих колес, представляющую собой кривошипно-кулисный механизм с двумя двойными поступательно движущимися по направляющим кулисами с приводом системы ориентации ведущих колес, представляющим собой мотор-редуктор с шаговым электродвигателем, и преобразующим через реечную передачу крутящий момент в поступательное движение двух двойных поступательно движущихся по направляющим кулис, соединенных через кривошипы с ползунами с осями поворотных вилок ведущих колес, и позволяющую мобильному роботизированному устройству совершать перемещения по рабочей поверхности вперед, назад, боком и поворачиваться вокруг своей центральной оси, при этом угол поворота ведущих колес определяется расстоянием, на которое перемещаются двойные поступательно движущиеся кулисы, которое задается количеством шагов, на которые повернется шаговый электродвигатель мотор-редуктора привода системы ориентации ведущих колес; устройство содержит модуль управления движением мобильного роботизированного устройства, представляющий собой электронное устройство, обрабатывающее сигналы, поступающие с пульта управления оператора или от системы машинного зрения или использующее заданный алгоритм движения мобильного роботизированного устройства и подающее команды ведущим колесам, представляющим собой мотор-колеса со встроенными электродвигателями, а также системе ориентации ведущих колес на вращение или останов; электропитание приводов ведущих колес, системы ориентации ведущих колес, технологического инструмента и электронных компонентов может осуществляться как от внешнего источника питания, так и от устанавливаемого на корпус модуля сменных аккумуляторов, общая емкость которых подбирается в зависимости от выполняемых технологических операций и объемов выполняемых работ.
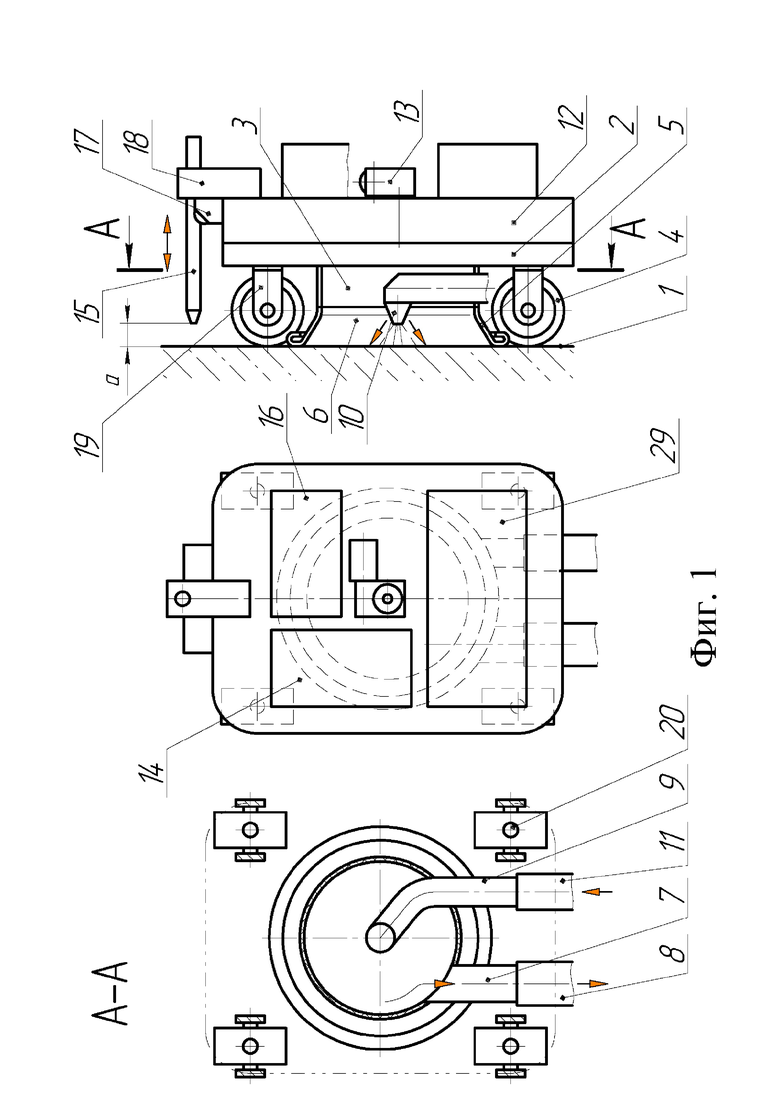
На фиг. 1 показан вид сверху, сбоку, разрез снизу мобильного роботизированного устройства и основные элементы, входящие в его состав.
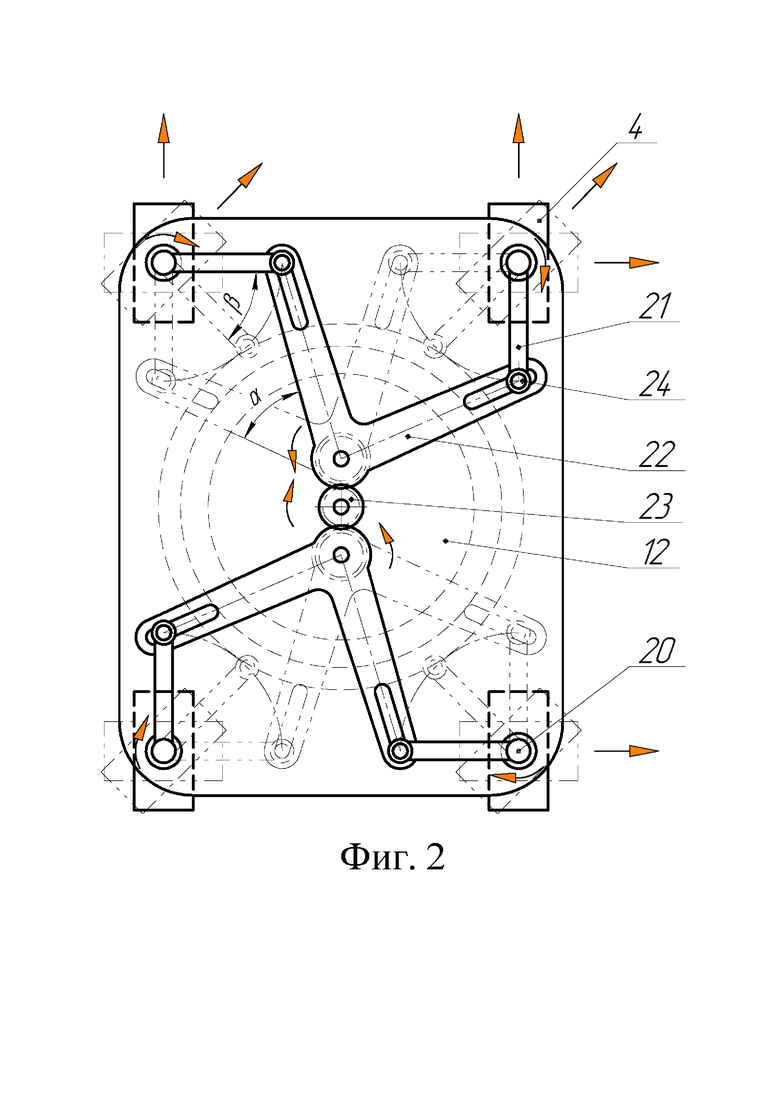
На фиг. 2 показано мобильное роботизированное устройство с 1-м вариантом системы ориентации ведущих колес, вид сверху.
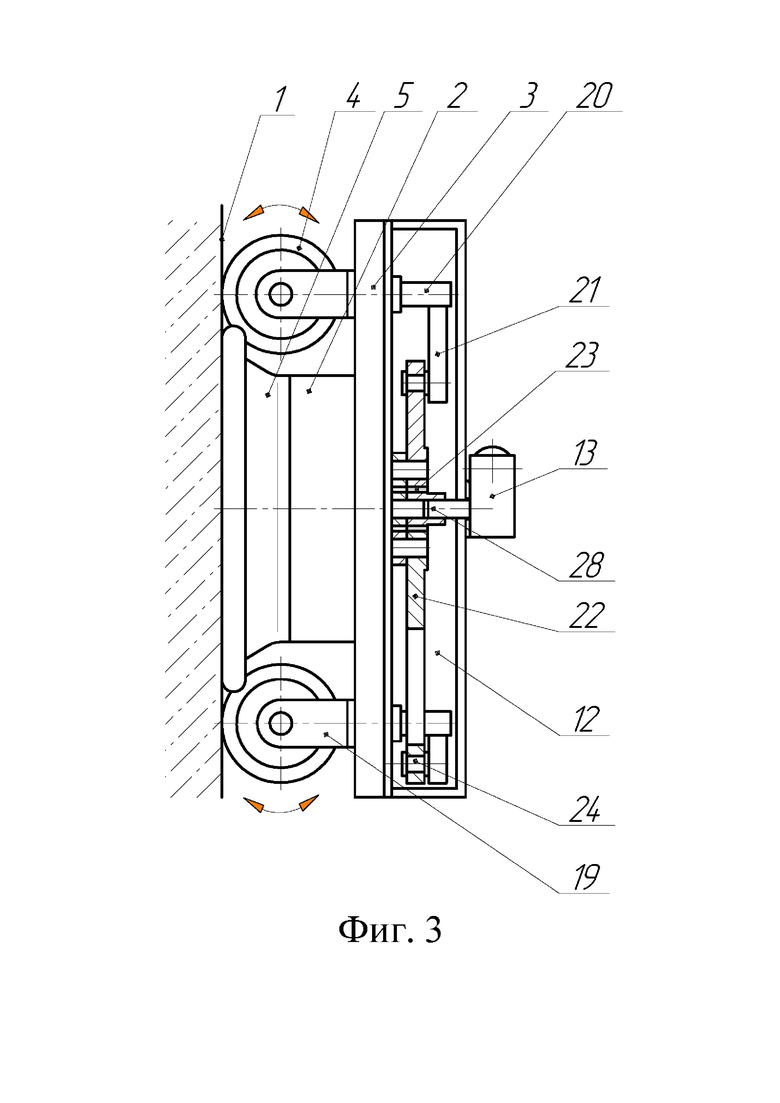
На фиг. 3 показано мобильное роботизированное устройство с 1-м вариантом системы ориентации ведущих колес, вид сбоку.
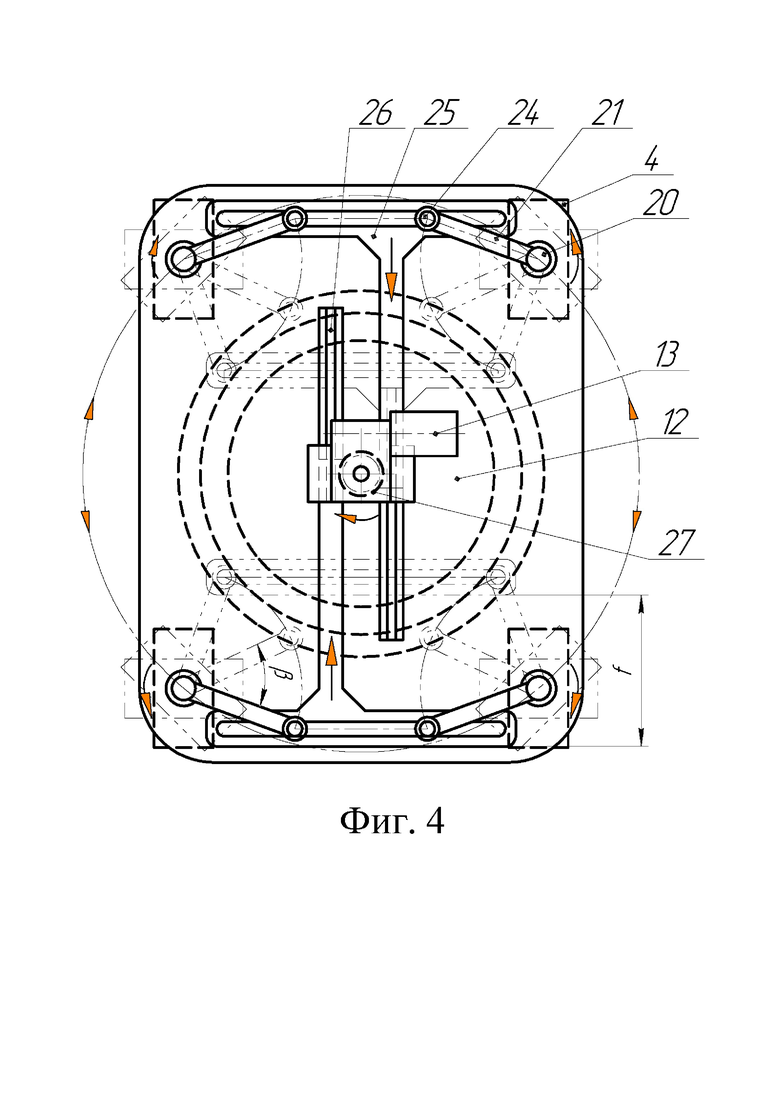
На фиг. 4 показано мобильное роботизированное устройство со 2-м вариантом системы ориентации ведущих колес, вид сверху.
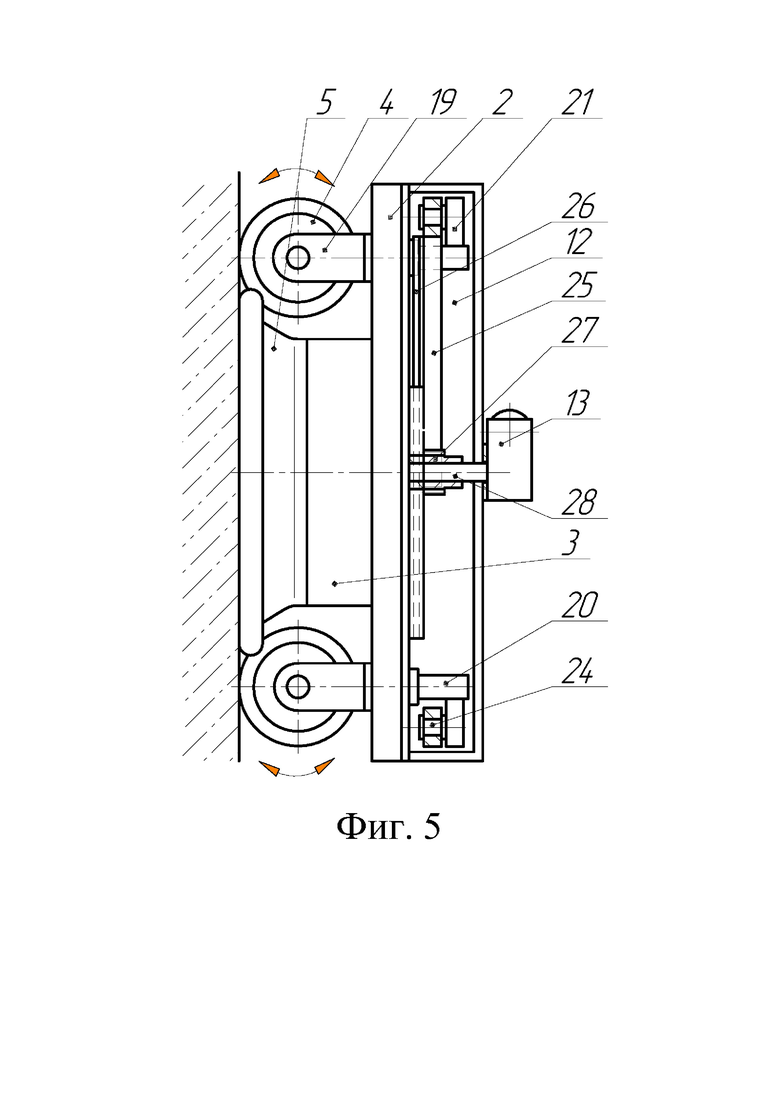
На фиг. 5 показано мобильное роботизированное устройство со 2-м вариантом системы ориентации ведущих колес, вид сбоку.
Мобильное роботизированное устройство, движущееся по рабочей поверхности 1, содержит основной корпус 2, боковую стенку основного корпуса 3, ведущие колеса 4, эластичную перегородку 5, пространство пониженного давления 6, всасывающий патрубок 7, расположенный на боковой стенке основного корпуса 3, всасывающий рукав 8, нагнетающий патрубок 9, сопло 10, нагнетающий рукав 11, систему ориентации ведущих колес 12, привод системы ориентации ведущих колес 13, модуль управления движением мобильного роботизированного устройства 14, технологический инструмент 15, модуль управления положением технологического инструмента 16, датчик положения технологического инструмента 17, привод технологического инструмента 18, поворотные вилки 19, оси поворотных вилок 20, кривошипы 21, соединенные с осями поворотных вилок 20, поворотные кулисы 22, зубчатую передачу 23, ползуны 24, поступательно движущиеся кулисы 25, направляющие 26, реечную передачу 27, выходной вал мотор-редуктора 28, модуль сменных аккумуляторов 29.
Предлагаемое мобильное роботизированное устройство работает следующим образом. Перед началом работы мобильное роботизированное устройство устанавливается на рабочую поверхность 1 (фиг. 1), которая может занимать любое пространственное положение. Для того чтобы мобильное роботизированное устройство удерживалось на рабочей поверхности 1 необходимо создать прижимную силу, действующую на основной корпус 2, который воздействует на ведущие колеса 4, а они, в свою очередь, удерживают мобильное роботизированное устройство на рабочей поверхности 1 за счет силы трения между рабочей поверхностью 1 и поверхностью качения ведущих колес 4. Эта прижимная сила создается за счет перепада давления между окружающей мобильное роботизированное устройство средой и пространством пониженного давления 6, образованном принимающим давление основным корпусом 2, рабочей поверхностью 1 и эластичной перегородкой 5, которая имеет в целом кольцевую форму и прикреплена одной стороной к боковой стенке основного корпуса 3, а другой стороной контактирует с рабочей поверхностью 1. Эластичная перегородка 5 выполнена из эластичного материала, такого как полиуретановый каучук, за счет этого она способна упруго деформироваться в направлении рабочей поверхности 1 и от нее. Разницу между давлением окружающей среды, воздействующим на основной корпус 2, и пространством пониженного давления 6 создает средство создания пониженного давления, роль которого может выполнять известное техническое устройство, такое как насос, инжектор, дренажный насос и т.д. (на чертежах не показано). Средство создания пониженного давления соединяется с пространством пониженного давления 6 через всасывающий патрубок 7, расположенный на боковой стенке основного корпуса 3, и всасывающий рукав 8. Средство создания пониженного давления непрерывно откачивает текучую среду (воздух или воду в случае выполнения работ по очистке под водой) из пространства пониженного давления 6. Текучая среда выводится наружу через всасывающий рукав 8, тем самым снижая давление внутри пониженного давления 6. Характеристики эластичной перегородки 5 подобраны таким образом, чтобы сила трения между ее концевым участком, контактирующем с рабочей поверхностью 1 и рабочей поверхностью 1 была меньше силы трения между ведущими колесами 4 и рабочей поверхностью 1. Величина перепада давления между окружающей средой и пространством пониженного давления 6 должна быть достаточной для удержания веса мобильного роботизированного устройства на рабочей поверхности 1, но в тоже время не быть избыточной, чтобы ведущие колеса 4 могли совершать качение по рабочей поверхности 1. Соблюдение этих условий позволяет мобильному роботизированному устройству перемещаться по рабочей поверхности 1.
Когда мобильное роботизированное устройство работает в режиме очистки поверхности, задействуется нагнетающий патрубок 9, сопло 10, нагнетающий рукав 11. Через эти элементы компрессорная станция (на чертежах не показана), нагнетает воздух с абразивным материалом или водяную струю высокого давления в пространство пониженного давления 6. Через сопло 10 воздух с абразивным материалом или вода высокого давления распыляется с высокой скоростью на рабочую поверхность 1. От соударения с рабочей поверхностью 1 струи воздуха с абразивным материалом или воды происходит отделение материалов, покрывающих рабочую поверхность 1, это могут быть, например, следы ржавчины, морские биоотложения, лакокрасочные или иные покрытия. Продукты очистки, смешанные с воздухом или водой, выводятся через всасывающий патрубок 7 и всасывающий рукав 8 за счет разрежения в пространстве пониженного давления 6, создаваемого средством создания пониженного давления и попадают на фильтрационную станцию (на чертежах не показана), где происходит отделение продуктов очистки от абразивного материала или воды. Далее очищенный абразив или вода вновь подаются компрессорной станцией в пространство пониженного давления 6, где происходит очистка рабочей поверхности 1. Этот процесс выполняется непрерывно одновременно с движением мобильного роботизированного устройства по рабочей поверхности 1. Таким образом, пространство пониженного давления 6, помимо функции удержания мобильного роботизированного устройства на рабочей поверхности 1, выполняет важную функцию отвода продуктов очистки и предотвращения их попадания в окружающую среду.
Рассмотрим работу мобильного роботизированного устройства в режиме нанесения покрытия. В этом режиме пространство пониженного давления 6 выполняет только функцию удержания устройства на рабочей поверхности 1. Для этого нагнетающий рукав 11 отсоединяется от нагнетающего патрубка 9, на открытый конец которого устанавливается герметичная заглушка (на чертежах не показана). Наносимое на рабочую поверхность 1 покрытие наносится технологическим инструментом 15, конструкция и размеры которого выбираются в зависимости от вида наносимого покрытия и технологических режимов нанесения. К технологическому инструменту 15 материал покрытия доставляется системой подачи (на чертежах не показана), которая создает необходимое давление на технологическом инструменте 15 и представляет собой известные технические устройства, предназначенные для подготовки и подачи материалов покрытий к в зону нанесения покрытия. Система подачи материала покрытия может находиться как непосредственно на мобильном роботизированном устройстве, так и удаленно от него. В случае удаленного расположения системы подачи материала материал подается на технологический инструмент по гибким рукавам (на чертежах не показаны). Для обеспечения заданных технологических режимов нанесения покрытия необходимо, чтобы технологический инструмент 15 находился на расстоянии a от рабочей поверхности 1. Это расстояние a не должно меняться в процессе движения мобильного роботизированного устройства по поверхности 1. Однако на пути движения мобильного роботизированного устройства могут возникать различные неровности, обусловленные конструкцией или дефектами обрабатываемой рабочей поверхности 1. К таким неровностям можно отнести выступающие усиления сварных швов, уступы, впадины, различные конструктивные элементы и т.д. Для обеспечения постоянного значения расстояния a мобильное роботизированное устройство оснащено модулем управления положением технологического инструмента 16, датчиком положения технологического инструмента 17, приводом технологического инструмента 18. Датчик положения технологического инструмента 17 непрерывно измеряет расстояние a, и отправляет эти данные в модуль управления положением технологического инструмента 16, который сравнивает эти данные с заданными технологическими параметрами и, в случае обнаружения отклонения межу ними, дает команду приводу технологического инструмента 18 на корректировку положения технологического инструмента 15 для того, чтобы он занял требуемое положение на расстоянии a от рабочей поверхности 1. Модуль управления положением технологического инструмента 16 представляет собой электронное устройство, основой которого является микроконтроллер, содержащий заданные параметры положения исполнительного инструмента 15, обрабатывающий получаемые от датчика положения исполнительного инструмента 17 данные и дающий команды приводу исполнительного инструмента 18.
Опишем подробнее процесс движения и маневрирования мобильного роботизированного устройства на рабочей поверхности 1. Управление мобильным роботизированным устройством осуществляется оператором удаленно посредством выносного проводного или беспроводного пульта управления (на чертежах не показан). Оператор может наблюдать текущее положение мобильного роботизированного устройства посредством визуального контроля, либо наблюдая за видеоизображением, получаемого с бортовых (на чертежах не показаны) или выносных видеокамер, размещенных в зоне проведения работ. Кроме того, движение мобильного роботизированного устройства на рабочей поверхности 1 может осуществляться по заранее заданному алгоритму без участия оператора, а также с использованием системы машинного зрения (на чертежах не показана). Функцию управления исполнительными механизмами мобильного роботизированного устройства выполняет модуль управления движением мобильного роботизированного устройства 14, который обрабатывает сигналы, поступающие с пульта управления или системы машинного зрения или использует заданный алгоритм движения и подает команды ведущим колесам 4 и системе ориентации ведущих колес 12. Ведущие колеса 4 представляют собой мотор-колеса со встроенными электродвигателями, которые при движении и маневрировании мобильного роботизированного устройства могут вращаться в одну или другую сторону. Электропитание исполнительных механизмов и электронных компонентов мобильного роботизированного устройства может осуществляться как от внешнего выносного источника питания (на чертежах не показан), так и от устанавливаемого на основной корпус 3 модуля сменных аккумуляторов 29, общая емкость которых подбирается в зависимости от выполняемых технологических операций и объемов выполняемых работ. В случае электропитания от внешнего источника модуль сменных аккумуляторов не устанавливается на основной корпус 3 и мобильное роботизированное устройство может нести дополнительную полезную нагрузку.
Система ориентации ведущих колес 12 в заявляемом мобильном роботизированном устройстве представлена в двух вариантах.
В первом варианте (фиг. 2, фиг. 5) система ориентации ведущих колес 12 представляет собой кривошипно-кулисный механизм с двумя двойными поворотными кулисами 22. Во вращение поворотные кулисы 22 приводит привод системы ориентации ведущих колес 13, соединенный с поворотными кулисами 22 посредством зубчатой передачи 23. Привод системы ориентации ведущих колес 13 представляет собой червячный мотор-редуктор с шаговым электродвигателем. С ведущими колесами 4 поворотные кулисы 22 соединены через ползуны 24, кривошипы 21, оси поворотных вилок 20, поворотные вилки 19. Кривошипы 21 крепятся к осям поворотных вилок 20 таким образом, чтобы при повороте кривошипов 21 поворачивались поворотные вилки 19, а сними и ведущие колеса 4. Таким образом, при повороте поворотных кулис 22 меняется угол положения ведущих колес 4 относительно основного корпуса 2 мобильного роботизированного устройства. В исходном положении ведущие колеса 4 направлены в одну сторону вдоль основного корпуса 2. В этом положении ведущих колес 4 мобильное роботизированное устройство движется по рабочей поверхности 1 вперед или назад, в зависимости от направления вращения ведущих колес 4. Когда необходимо сделать маневр, т.е. сместиться относительно текущего курса, приводится в действие привод системы ориентации ведущих колес 13, вращение от выходного вала мотор-редуктора 28 передается через зубчатую передачу 23 поворотным кулисам 22, которые поворачиваются на необходимый угол α, ползуны 24, перемещаясь в пазах поворотных кулис 22, поворачивают кривошипы 21, момент вращения от кривошипов 21 передается на оси поворотных вилок 20, поворотные вилки 19 вместе с ведущими колесами 4 поворачиваются на угол β. Угол α поворота поворотных кулис 22 и, соответственно, угол β поворота ведущих колес 4, задаются количеством шагов, на которые повернется электродвигатель мотор-редуктора привода ориентации ведущих колес 13. Конструкция и размеры кривошипов 21 и поворотных кулис 22 подобраны так, чтобы ведущие колеса 4 могли поворачиваться на угол β от 0° до 90°. Поскольку плоскости ведущих колес 4 параллельны друг другу в любом положении системы ориентации ведущих колес 12, мобильное роботизированное устройство может двигаться в разных направлениях не меняя положение основного корпуса 2. На фиг. 1 стрелками в качестве примера показаны направления движения мобильного роботизированного устройства при повороте ведущих колес 4 на угол β=0°, 45°, 90°, но направления движения мобильного роботизированного устройство могут быть и другими, в зависимости от угла поворота β ведущих колес 4. Таким образом, мобильное роботизированное устройство может совершать плоско-параллельные перемещения в различных направлениях вдоль рабочей поверхности 1.
Во втором варианте (фиг. 4, фиг. 5) система ориентации ведущих колес 12 представляет собой кривошипно-кулисный механизм с двумя двойными поступательно движущимися кулисами 25, движущимися по направляющим 26. В движение поступательно движущиеся кулисы 25 приводятся приводом системы ориентации ведущих колес 13 через реечную передачу 28. Как и в первом варианте, привод системы ориентации ведущих колес 13 представляет собой червячный мотор-редуктор с шаговым электродвигателем. С ведущими колесами 4 поступательно движущиеся кулисы 25 соединены через ползуны 24, кривошипы 21, оси поворотных вилок 20, поворотные вилки 19. Кривошипы 21 крепятся к осям поворотных вилок 20 таким образом, чтобы при повороте кривошипов 21 поворачивались поворотные вилки 19, а сними и ведущие колеса 4. Таким образом, при повороте поступательно движущихся кулис 25 меняется угол установки ведущих колес 4 относительно основного корпуса 2 мобильного роботизированного устройства. В исходном положении ведущие колеса 4 направлены в одну сторону вдоль основного корпуса 2. В этом положении ведущих колес 4 мобильное роботизированное устройство движется по рабочей поверхности 1 вперед или назад, в зависимости от направления вращения ведущих колес 4. Когда необходимо сделать маневр, т.е. сместиться с прямолинейного курса, приводится в действие привод системы ориентации ведущих колес 13, вращение от выходного вала мотор-редуктора 28 привода системы ориентации ведущих колес 13 передается через реечную передачу 27 поступательно движущимся кулисам 25, которые перемещаются по направляющим 26 на расстояние f. Ползуны 24, перемещаясь в пазах поступательно движущихся кулис 25, поворачивают кривошипы 21, момент вращения передается на оси поворотных вилок 20, поворотные вилки 19 вместе с ведущими колесами 4 поворачиваются на угол β, который может принимать значения от 0° до 90°. Величина расстояния f, на которое перемещаются поступательно движущиеся кулисы 25 и, соответственно, угол β поворота ведущих колес 4, задаются количеством шагов, на которые повернется электродвигатель мотор-редуктора привода ориентации ведущих колес 13. Однако, в отличие от первого варианта системы ориентации ведущих колес 12, здесь плоскости ведущих колес 4 в промежуточных положениях угла β не параллельны, поэтому рабочими в данном варианте являются углы β равные 0°, 45°, 90°. При угле β=0° мобильное роботизированное устройство, в зависимости от направления вращения ведущих колес 4, движется вперед или назад вдоль рабочей поверхности 1. При угле β=90° мобильное роботизированное устройство, в зависимости от направления вращения ведущих колес 4, движется боком в левую или правую сторону. При угле β=45° плоскости ведущих колес 3 становятся касательными к окружности, центром которой является ось симметрии основного корпуса 2 мобильного роботизированного устройства. Эта окружность является траекторией поворота мобильного роботизированного устройства. Таким образом, мобильное роботизированное устройство, в зависимости от направления вращения ведущих колес 4, может совершать разворот вокруг своей центральной оси по часовой или против часовой стрелки. Такая возможность позволяет разворачивать мобильное роботизированное устройство на месте без необходимости в дополнительных перемещениях, что значительно повышает его маневренность и возможность применения в ограниченном пространстве.
Предлагаемое мобильное роботизированное устройство за счет повышения маневренности и одновременного упрощения управления им позволяет значительно повысить производительность таких технологических процессов как очистка поверхностей, нанесение на протяженные поверхности лакокрасочный и иных покрытий. На маневрирование и позиционирование мобильного роботизированного устройства затрачивается меньше времени, оператору, управляющему мобильным роботизированным устройством, требуется меньше действий для этих операций. Применение в системе ориентации ведущих колес только одного электропривода снижает общее потребление электроэнергии мобильным роботизированным устройством, что позволяет использовать источники электропитания меньшей мощности и бортовые аккумуляторы меньшей емкости. Помимо повышения производительности предлагаемое мобильное роботизированное устройство повышает качество работ по нанесению покрытий за счет автоматизированного управления положением технологического инструмента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система непрерывной загрузки бурильных труб в рабочую зону буровой установки | 2022 |
|
RU2788220C1 |
| Секционное устройство для разогрева и доведения до готовности блюд-полуфабрикатов | 2023 |
|
RU2822280C1 |
| Устройство для разогрева и доготовки блюд-полуфабрикатов с функцией мармита | 2022 |
|
RU2788727C1 |
| Устройство для доставки приборов в горизонтальную скважину | 2023 |
|
RU2820514C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЕСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2019 |
|
RU2730561C1 |
| Способ приготовления блюд-полуфабрикатов в упаковке с возможностью их дальнейшего автоматизированного разогрева и/или доготовки | 2022 |
|
RU2767205C1 |
| РОБОТИЗИРОВАННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ТРАКТОР-ВЕЗДЕХОД | 2022 |
|
RU2783560C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
Изобретение относится к робототехнике и может быть использовано в качестве мобильной роботизированной платформы в составе автоматизированных комплексов, предназначенных для очистки и технологической подготовки поверхностей крупногабаритных изделий с последующим нанесением на них различных покрытий. Устройство содержит корпус, ведущие колеса, эластичную перегородку, имеющую кольцевую форму и прикрепленную одной стороной к боковой стенке корпуса, а другой стороной контактирующую с рабочей поверхностью. Эластичная перегородка и рабочая поверхность образуют пространство пониженного давления относительно давления окружающей среды, величина которого достаточна для удержания устройства на рабочей поверхности прижимной силой, создаваемой за счет разницы между давлениями окружающей среды и давлением среды в пространстве пониженного давления. Устройство содержит нагнетающий патрубок, проходящий через боковую стенку корпуса в пространство пониженного давления, сопло, установленное на конце нагнетающего патрубка в пространстве пониженного давления, и нагнетающий рукав, соединенный одним концом с нагнетающим патрубком, а другим концом - с компрессорной станцией для подачи через нее на рабочую поверхность абразивного материала или водяной струи под давлением, обеспечивающим отделение продуктов очистки, отложений, покрытий от рабочей поверхности. Обеспечивается очистка рабочей поверхности и отвод продуктов очистки в пространстве пониженного давления без проникновения продуктов очистки в окружающую среду при повышенной маневренности устройства. 6 з.п. ф-лы, 5 ил.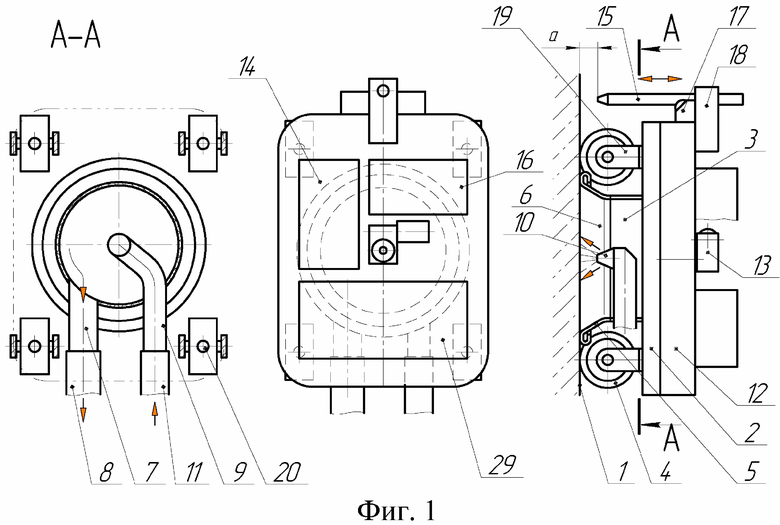
1. Мобильное роботизированное устройство для автоматизированной очистки и подготовки поверхностей изделий с последующим нанесением на них покрытий, содержащее корпус, боковую стенку корпуса, ведущие колеса, соединяющиеся с корпусом, эластичную перегородку, имеющую в целом кольцевую форму и прикрепленную одной стороной к боковой стенке корпуса, а другой стороной контактирующую с рабочей поверхностью, при этом эластичная перегородка и рабочая поверхность образуют пространство пониженного давления относительно давления окружающей среды, величина которого достаточна для удержания мобильного роботизированного устройства на рабочей поверхности прижимной силой, создаваемой за счет разницы между давлениями окружающей среды и давлением среды в пространстве пониженного давления, средство создания пониженного давления, в качестве которого использован насос, инжектор или дренажный насос, всасывающий рукав, всасывающий патрубок, расположенный на боковой стенке корпуса, при этом средство создания пониженного давления соединено с пространством пониженного давления через всасывающий патрубок и всасывающий рукав, отличающееся тем, что дополнительно содержит нагнетающий патрубок, проходящий через боковую стенку корпуса в пространство пониженного давления, сопло, установленное на конце нагнетающего патрубка в пространстве пониженного давления и нагнетающий рукав, соединенный одним концом с нагнетающим патрубком, а другим концом - с компрессорной станцией, выполненной с возможностью подачи через нее на рабочую поверхность абразивного материала или водяной струи под давлением, обеспечивающим отделение продуктов очистки, отложений, покрытий от рабочей поверхности, при этом мобильное роботизированное устройство выполнено обеспечивающим осуществление очистки рабочей поверхности и отвода продуктов очистки в пространстве пониженного давления без проникновения продуктов очистки в окружающую среду.
2. Устройство по п.1, отличающееся тем, что в каждое ведущее колесо встроен электродвигатель, при этом ведущие колеса являются мотор-колесами, а сами ведущие колеса установлены в корпусе посредством поворотных вилок, которые могут вращаться вокруг своих вертикальных осей.
3. Устройство по п.1, отличающееся тем, что содержит технологический инструмент, модуль управления положением технологического инструмента, датчик положения технологического инструмента, привод технологического инструмента, при этом датчик положения технологического инструмента выполнен с возможностью непрерывного измерения расстояния от технологического инструмента до рабочей поверхности и отправки этих данных в модуль управления положением технологического инструмента, представляющий собой электронное устройство с возможностью подачи команд приводу технологического инструмента на корректировку положения технологического инструмента в случае обнаружения его отклонения от заданного расстояния до рабочей поверхности.
4. Устройство по п.1, отличающееся тем, что содержит систему ориентации ведущих колес, представляющую собой кривошипно-кулисный механизм с двумя двойными поворотными кулисами с приводом системы ориентации ведущих колес, представляющим собой мотор-редуктор с шаговым электродвигателем, передающий посредством зубчатой передачи крутящий момент двум двойным поворотным кулисам, соединенным через кривошипы с ползунами с осями поворотных вилок ведущих колес, и позволяющую мобильному роботизированному устройству совершать плоско-параллельные перемещения по рабочей поверхности, при этом угол поворота ведущих колес определяется углом поворота поворотных кулис, который задается количеством шагов, на которые повернется шаговый электродвигатель мотор-редуктора привода системы ориентации ведущих колес.
5. Устройство по п.1, отличающееся тем, что содержит систему ориентации ведущих колес, представляющую собой кривошипно-кулисный механизм с двумя двойными поступательно движущимися по направляющим кулисами с приводом системы ориентации ведущих колес, представляющим собой мотор-редуктор с шаговым электродвигателем и преобразующим через реечную передачу крутящий момент в поступательное движение двух двойных поступательно движущихся по направляющим кулис, соединенных через кривошипы с ползунами с осями поворотных вилок ведущих колес, и позволяющую мобильному роботизированному устройству совершать перемещения по рабочей поверхности вперед, назад, боком и поворачиваться вокруг своей центральной оси, при этом угол поворота ведущих колес определяется расстоянием, на которое перемещаются двойные поступательно движущиеся кулисы, которое задается количеством шагов, на которые повернется шаговый электродвигатель мотор-редуктора привода системы ориентации ведущих колес.
6. Устройство по п.1, отличающееся тем, что содержит модуль управления движением мобильного роботизированного устройства, представляющий собой электронное устройство, обрабатывающее сигналы, поступающие с пульта управления оператора или от системы машинного зрения или использующее заданный алгоритм движения мобильного роботизированного устройства и подающее команды ведущим колесам, представляющим собой мотор-колеса со встроенными электродвигателями, а также системе ориентации ведущих колес на вращение или останов.
7. Устройство по п.1, отличающееся тем, что электропитание приводов ведущих колес, системы ориентации ведущих колес, технологического инструмента и электронных компонентов может осуществляться как от внешнего источника питания, так и от устанавливаемого на корпус модуля сменных аккумуляторов, общая емкость которых подбирается в зависимости от выполняемых технологических операций и объемов выполняемых работ.
| WO 2000010864 A1, 02.03.2000 | |||
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2719222C1 |
| РОБОТ-ПЫЛЕСОС И СПОСОБ УПРАВЛЕНИЯ ЭТИМ РОБОТОМ-ПЫЛЕСОСОМ | 2006 |
|
RU2314557C2 |
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |
| KR 1020160043841 A, 22.04.2016. | |||

