Область техники, к которой относится изобретение
[001] Настоящая технология относится к роботизированным транспортным средствам для доставки товаров пользователям, в частности к соединительной системе для установки компьютерного процессора.
Уровень техники
[002] Автономные роботизированные транспортные средства представляют собой транспортные средства, способные автономно передвигаться по частной территории и/или в общественных местах. Компьютерный процессор, размещенный в роботизированном транспортном средстве, выполняет при его эксплуатации ряд задач, таких как прием сигналов от системы датчиков, которые определяют местоположение и/или распознают окружающее пространство, а также управление скоростью и направлением движения роботизированного транспортного средства на основе этих сигналов. Например, к роботам-доставщикам относятся автономные роботизированные транспортные средства, способные передвигаться по улицам, доставляя товары покупателям. Роботы-доставщики содержат контейнер для размещения доставляемых товаров, датчики, установленные снаружи робота-доставщика для получения информации об окружающем пространстве во время его эксплуатации, и компьютерную систему для обработки информации от датчиков.
[003] Элементы компьютерного процессора во время работы выделяют тепло. В отсутствие эффективной системы охлаждения выделяемое тепло не отводится в достаточной мере, что приводит к повреждению элементов компьютерного процессора и, как следствие, к нарушению работы роботизированного транспортного средства. Для ремонта роботизированного транспортного средства и обеспечения его нормальной работы необходимо иметь доступ к процессору компьютера для восстановления и/или замены его элементов. При этом получить доступ к процессору компьютера не всегда легко. В частности, отключение и подключение компьютерного процессора может представлять собой сложную и трудоемкую задачу.
[004] В известных технических решениях был предложен ряд способов для решения вышеуказанной технической задачи.
[005] В патенте US 11001443B1 «Drainage system for a delivery autonomous ground vehicle» («Дренажная система для автономного наземного транспортного средства доставки»), выданном 11 мая 2021 года и принадлежащем компании Amazon Technologies, Inc., раскрыто автономное наземное транспортное средство доставки, которое содержит ряд дренажных средств, предотвращающих попадание воды на доставляемую упаковку и чувствительные элементы.
[006] В патентной заявке US 2021070339A1 «Vehicle systems and methods» («Транспортные системы и способы транспортировки»), опубл. 11 марта 2021 года и принадлежащей John Bradford King, раскрыта транспортная система, которая включает в себя шасси, множество колес, соединенных с шасси и служащих опорой шасси для обеспечения его движения по поверхности, и транспортировочную платформу, соединенную с шасси.
[007] В полезной модели CN 214875236U «Intelligent mobile device» («Интеллектуальное мобильное устройство»), выданной 26 ноября 2021 года и принадлежащей компании Suzhou HYC Technology Co., Ltd., раскрыто интеллектуальное мобильное устройство, содержащее мобильную базу.
[008] В патентной заявке US 2021197387A1 «Self-driving robot and method of operating the same» («Самоуправляемый робот и способ управления им»), опубликованной 1 июля 2021 года и принадлежащей компании LG Electronics, Inc., раскрыт самоуправляемый робот, который содержит грузовой контейнер, включающий в себя по меньшей мере одно грузовое пространство, канал связи, обеспечивающий передачу или прием сигнала, устройство сбора информации, способное распознавать окружающее пространство, приводное устройство, способное обеспечивать движение самоуправляемого робота, и процессор, способный управлять грузовым контейнером, каналом связи и устройством сбора информации.
Раскрытие изобретения
[009] Целью настоящей технологии является устранение по меньшей мере части недостатков известных технических решений.
[010] В соответствии с широким аспектом настоящей технологии реализовано роботизированное транспортное средство для доставки товаров, включающее в себя компьютерный процессор, корпус для размещения компьютерного процессора, первый соединительный элемент, расположенный на корпусе, кожух, размещенный в кузове роботизированного транспортного средства и вмещающий корпус, и второй соединительный элемент, комплементарный первому соединительному элементу и расположенный на кожухе. Второй соединительный элемент может разъемным образом соединяться с первым соединительным элементом, а также задавать положение и ориентацию корпуса совместно с первым соединительным элементом при установке корпуса в кожух.
[011] В некоторых вариантах осуществления корпус содержит канал охлаждения для охлаждения компьютерного процессора, а первый соединительный элемент имеет выходное отверстие канала, сообщающееся по текучей среде с каналом охлаждения для подачи охлаждающей среды в канал охлаждения.
[012] В некоторых вариантах осуществления канал охлаждения окружает компьютерный процессор и проходит по длине корпуса.
[013] В некоторых вариантах осуществления кожух имеет выходное отверстие, сообщающееся по текучей среде с внешним каналом кузова роботизированного транспортного средства для подачи охлаждающей среды, а также сообщающееся по текучей среде с выходным отверстием канала для подачи охлаждающей среды в канал охлаждения.
[014] В некоторых вариантах осуществления выходное отверстие кожуха и выходное отверстие канала первого соединительного элемента совмещаются при соединении первого соединительного элемента со вторым соединительным элементом.
[015] В некоторых вариантах осуществления первый соединительный элемент включает в себя первую часть корпуса и вторую часть корпуса, между которыми расположена промежуточная часть корпуса. В первой части корпуса имеется выходное отверстие канала, промежуточная часть корпуса образует камеру, сообщающуюся по текучей среде с выходным отверстием канала, а во второй части корпуса имеется отверстие, сообщающееся по текучей среде с камерой в промежуточной части корпуса и с каналом охлаждения корпуса.
[016] В некоторых вариантах осуществления канал охлаждения содержит первый канал и второй канал, а отверстие во второй части корпуса включает в себя первое отверстие, сообщающееся по текучей среде с первым каналом, и второе отверстие, сообщающееся по текучей среде со вторым каналом.
[017] В некоторых вариантах осуществления первая часть корпуса, вторая часть корпуса и промежуточная часть корпуса образуют единое целое.
[018] В некоторых вариантах осуществления первый соединительный элемент содержит канавку, а второй соединительный элемент содержит направляющую, геометрически комплементарную канавке, вследствие чего направляющая способна направлять корпус компьютерного процессора при его установке в кожух за счет стыковки с канавкой первого соединительного элемента.
[019] В некоторых вариантах осуществления первый соединительный элемент включает в себя первую часть корпуса и вторую часть корпуса, между которыми расположена промежуточная часть корпуса. Канавка проходит от наружной поверхности первой части корпуса до внутренней поверхности второй части корпуса.
[020] В некоторых вариантах осуществления канавка имеет скошенную часть, образующую наружную стенку промежуточной части корпуса.
[021] В некоторых вариантах осуществления первая часть корпуса, вторая часть корпуса и промежуточная часть корпуса образуют единое целое.
[022] В некоторых вариантах осуществления канавка является непрерывной и имеет U-образную форму и направляющая является непрерывной и имеет U-образную форму.
[023] В некоторых вариантах осуществления первый соединительный элемент может вдвигаться во второй соединительный элемент.
[024] В некоторых вариантах осуществления корпус содержит два первых соединительных элемента, каждый из которых расположен на наружной поверхности боковой стенки корпуса.
[025] В некоторых вариантах осуществления кожух содержит два вторых соединительных элемента, каждый из которых расположен на боковой стенке кожуха.
[026] В некоторых вариантах осуществления два первых соединительных элемента расположены на противоположных боковых стенках корпуса, а два вторых соединительных элемента – на внутренней поверхности противоположных боковых стенок кожуха.
[027] В некоторых вариантах осуществления второй соединительный элемент установлен на внутренней поверхности кожуха.
[028] В некоторых вариантах осуществления кожух расположен на передней панели кузова роботизированного транспортного средства.
[029] В некоторых вариантах осуществления первый соединительный элемент и второй соединительный элемент разъемным образом соединены друг с другом для обеспечения быстрого соединения корпуса с кожухом.
Краткое описание чертежей
[030] Эти и другие признаки, аспекты и преимущества настоящей технологии содержатся в дальнейшем описании, в приложенной формуле изобретения и на следующих чертежах.
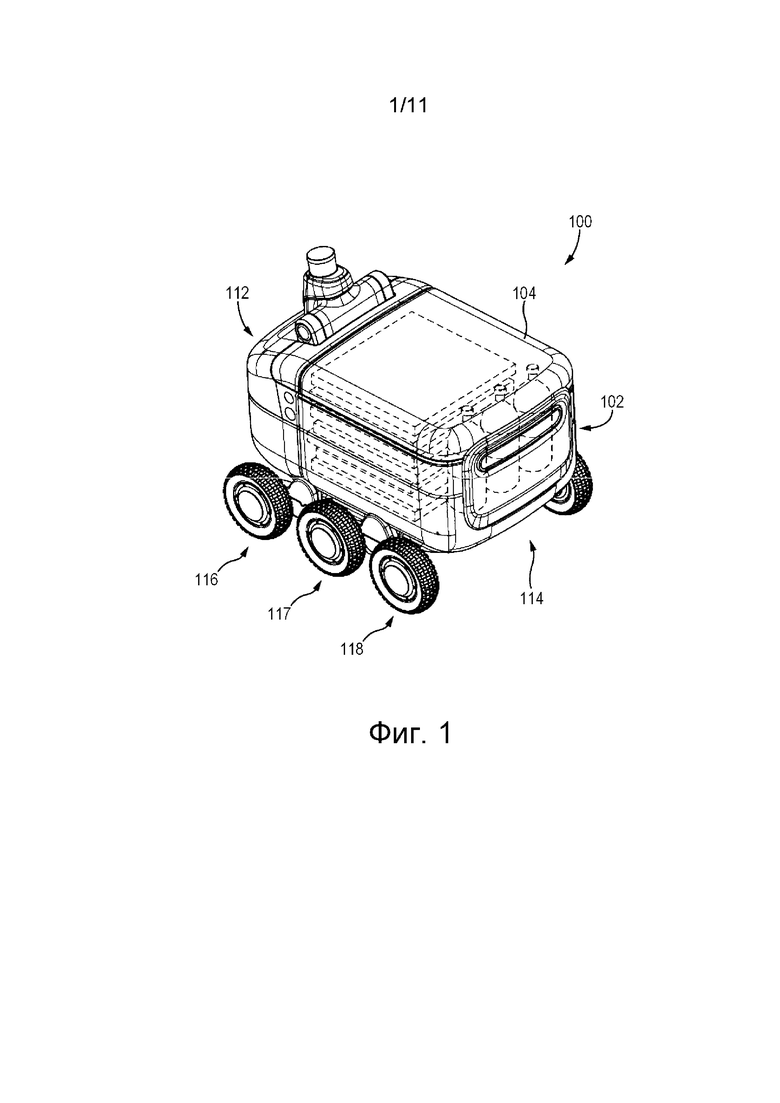
[031] На фиг. 1 представлен аксонометрический вид справа сзади роботизированного транспортного средства с крышкой в закрытом положении в соответствии с некоторыми вариантами осуществления настоящей технологии.
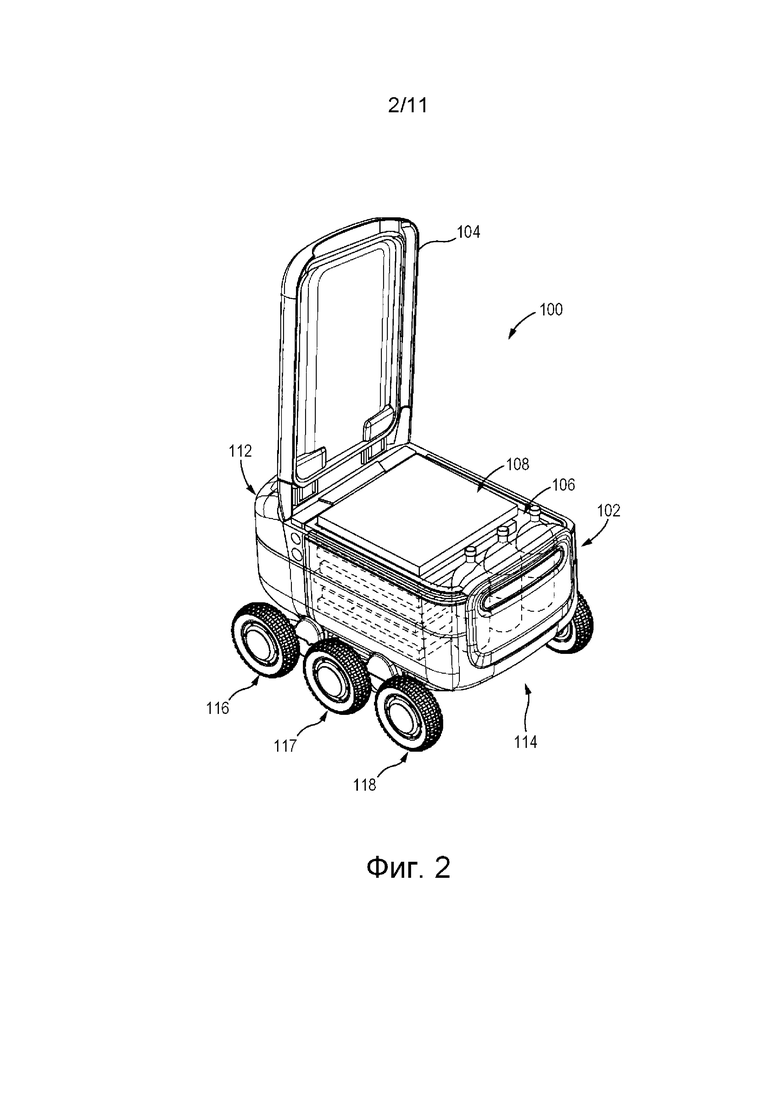
[032] На фиг. 2 представлен аксонометрический вид справа сзади роботизированного транспортного средства, изображенного на фиг. 1, с крышкой в открытом положении в соответствии с некоторыми вариантами осуществления настоящей технологии.
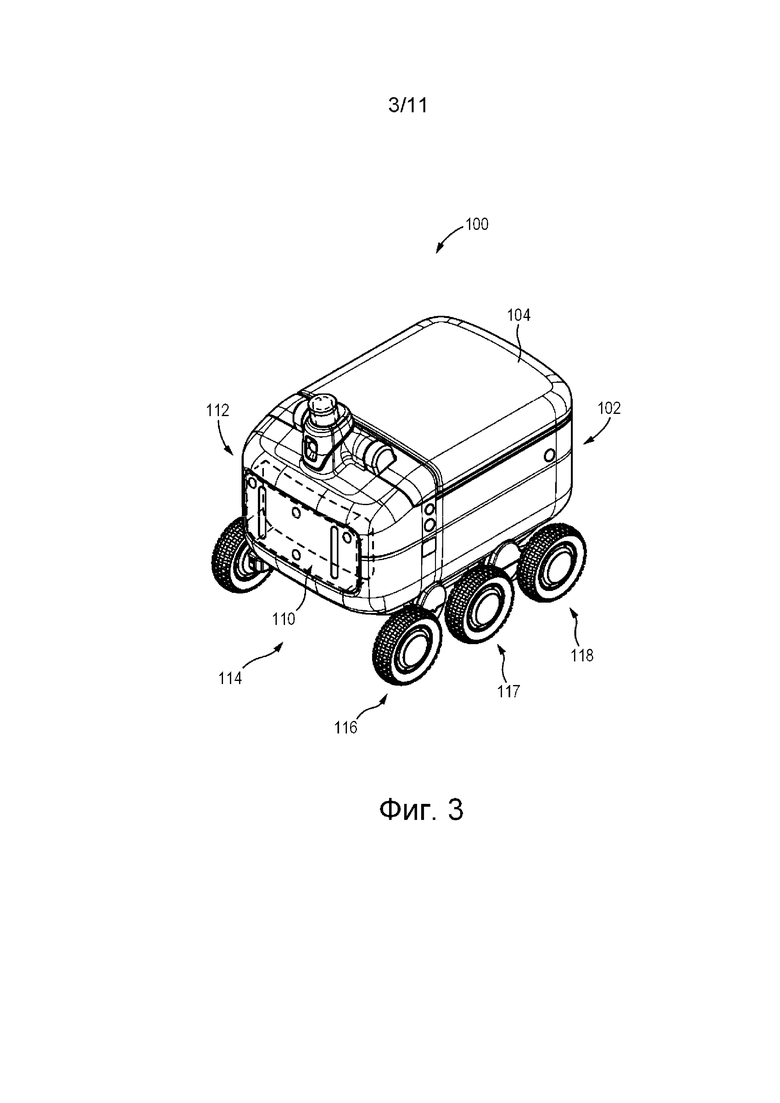
[033] На фиг. 3 представлен аксонометрический вид справа спереди роботизированного транспортного средства, изображенного на фиг. 1, в соответствии с некоторыми вариантами осуществления настоящей технологии.
[034] На фиг. 4 представлен вид сверху системы охлаждения роботизированного транспортного средства, изображенного на фиг. 1, в соответствии с некоторыми вариантами осуществления настоящей технологии.
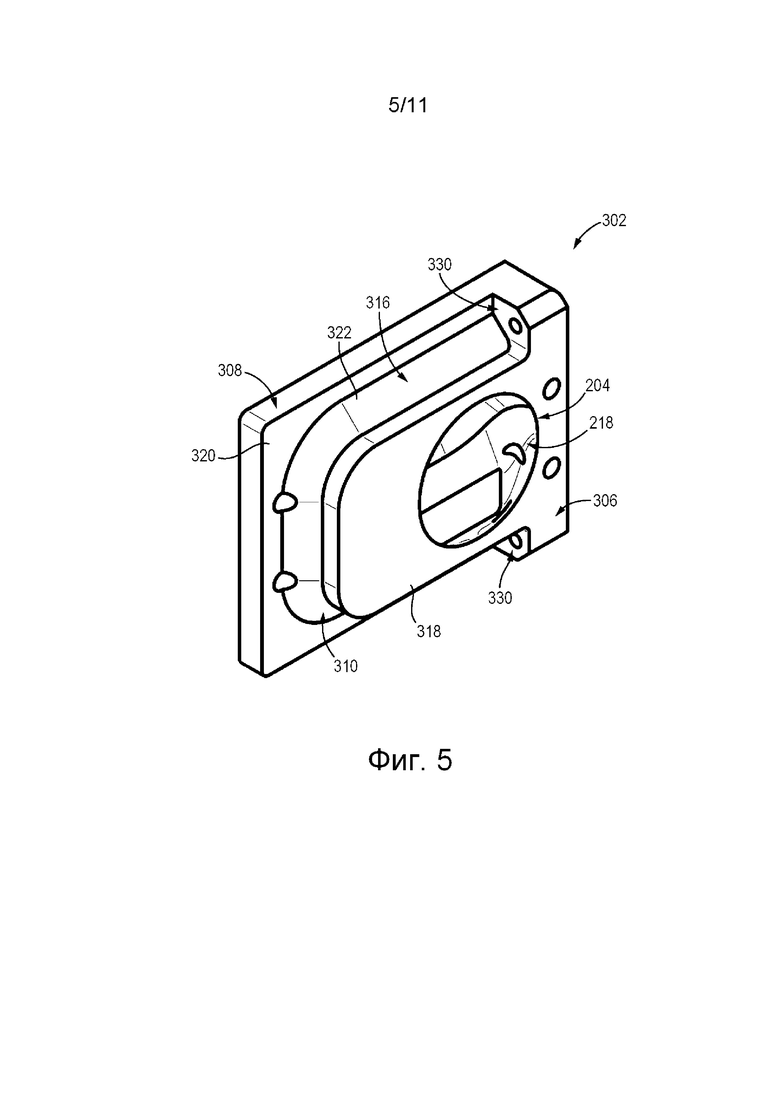
[035] На фиг. 5 представлен аксонометрический вид первого соединительного элемента роботизированного транспортного средства, изображенного на фиг. 1, в соответствии с некоторыми вариантами осуществления настоящей технологии.
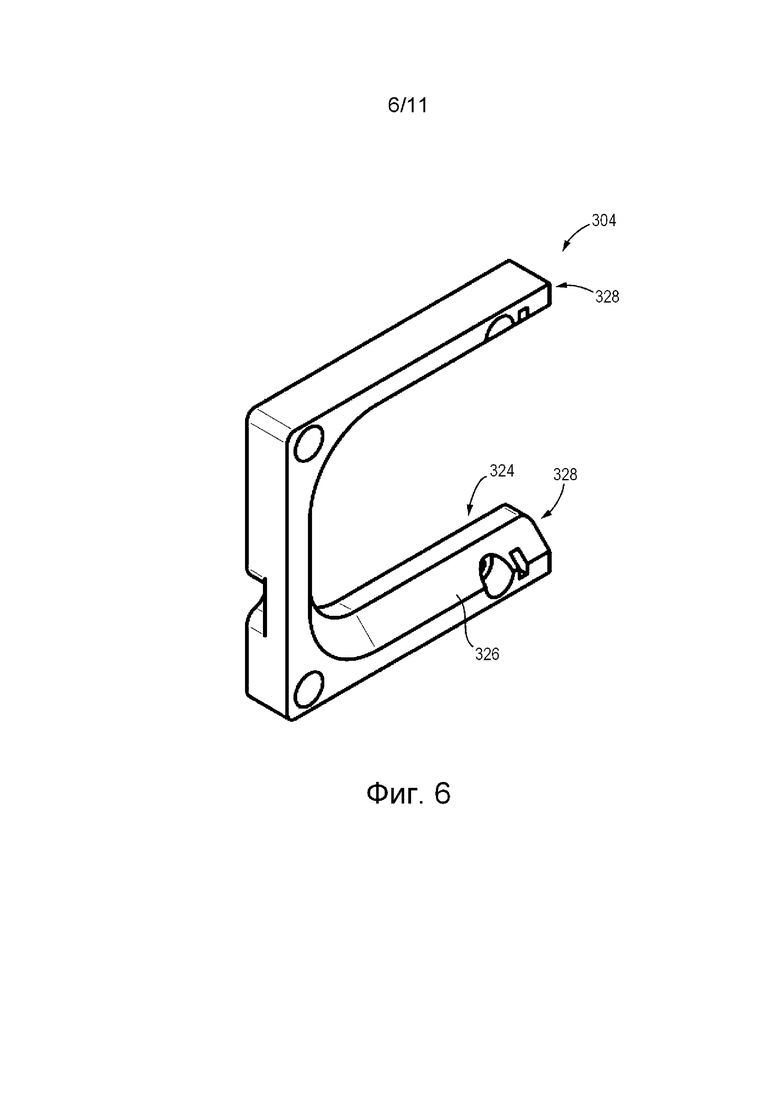
[036] На фиг. 6 представлен аксонометрический вид второго соединительного элемента роботизированного транспортного средства, изображенного на фиг. 1, в соответствии с некоторыми вариантами осуществления настоящей технологии.
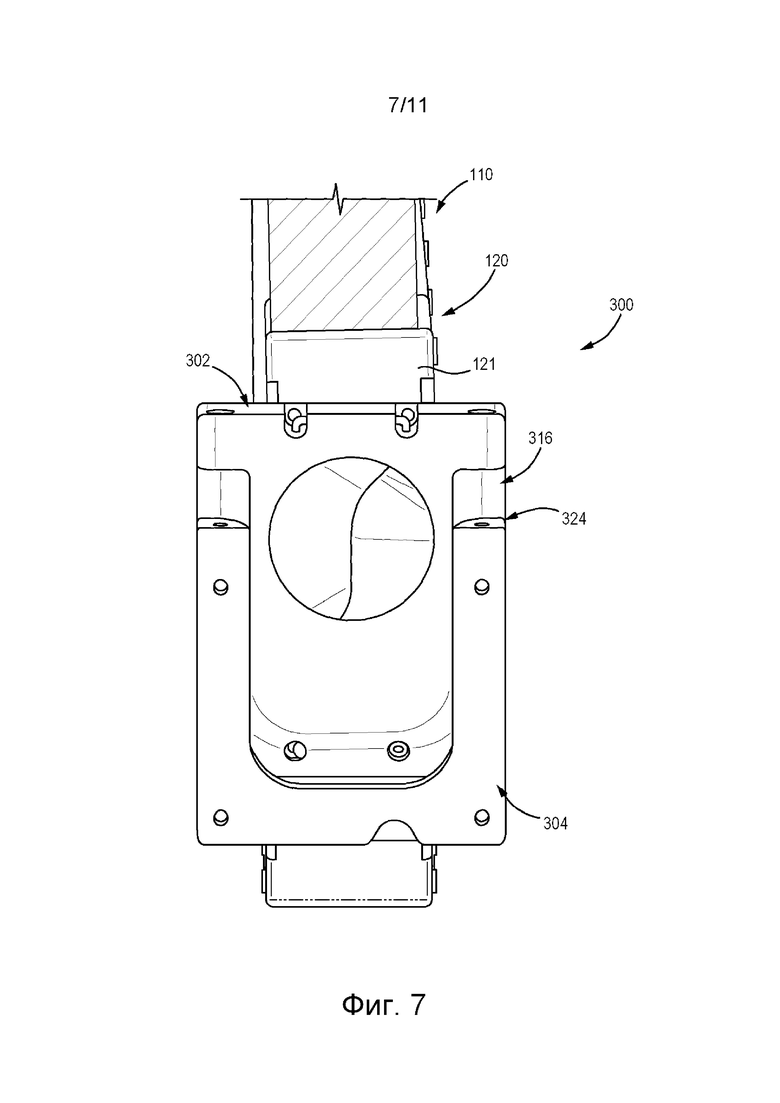
[037] На фиг. 7 представлен вид спереди первого соединительного элемента, изображенного на фиг. 5, и второго соединительного элемента, изображенного на фиг. 6, с первым соединительным элементом, взаимодействующим со вторым соединительным элементом, в соответствии с некоторыми вариантами осуществления настоящей технологии.
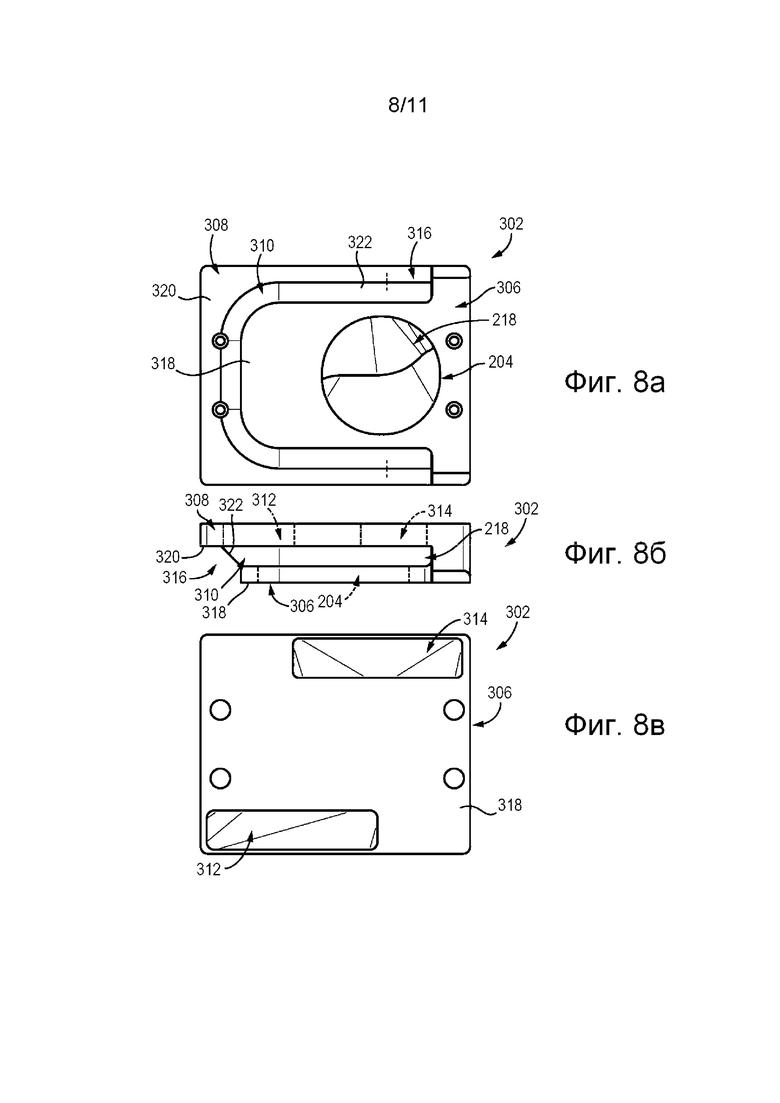
[038] На фиг. 8а представлен вид спереди первого соединительного элемента, изображенного на фиг. 5, в соответствии с некоторыми вариантами осуществления настоящей технологии.
[039] На фиг. 8б представлен вид справа первого соединительного элемента, изображенного на фиг. 5, в соответствии с некоторыми вариантами осуществления настоящей технологии.
[040] На фиг. 8в представлен вид сзади первого соединительного элемента, изображенного на фиг. 5, в соответствии с некоторыми вариантами осуществления настоящей технологии.
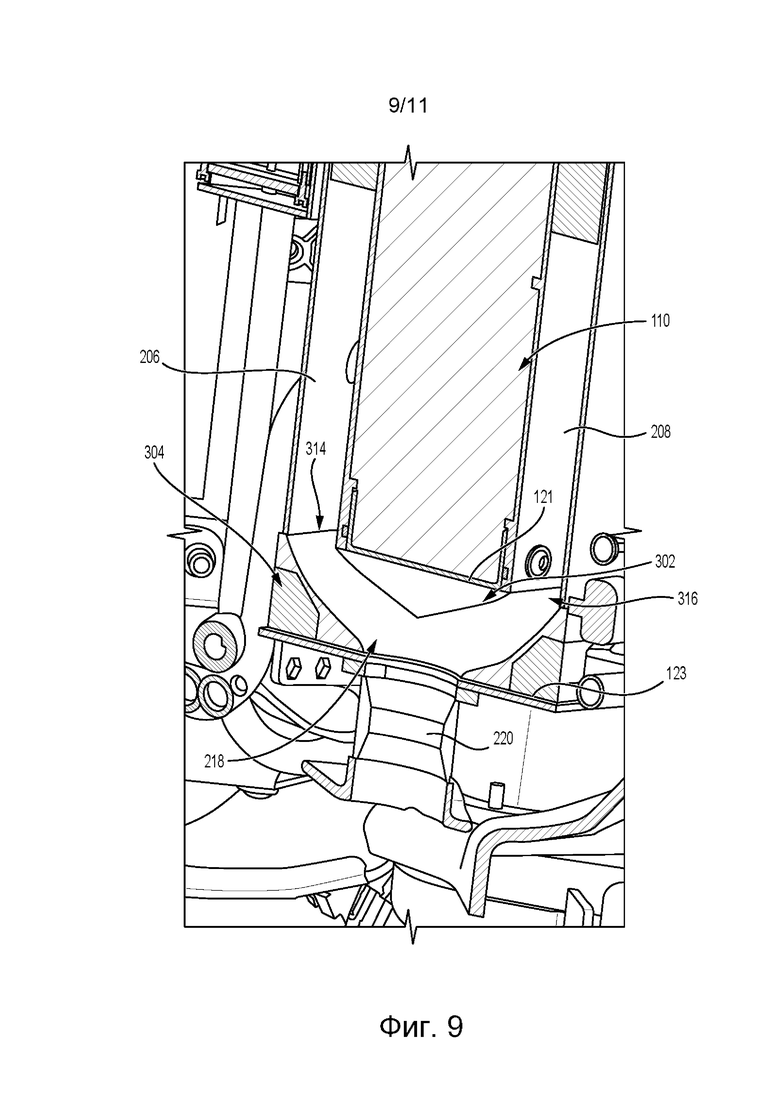
[041] На фиг. 9 представлен аксонометрический вид половины системы охлаждения и соединительной системы роботизированного транспортного средства, изображенного на фиг. 1, в соответствии с некоторыми вариантами осуществления настоящей технологии.
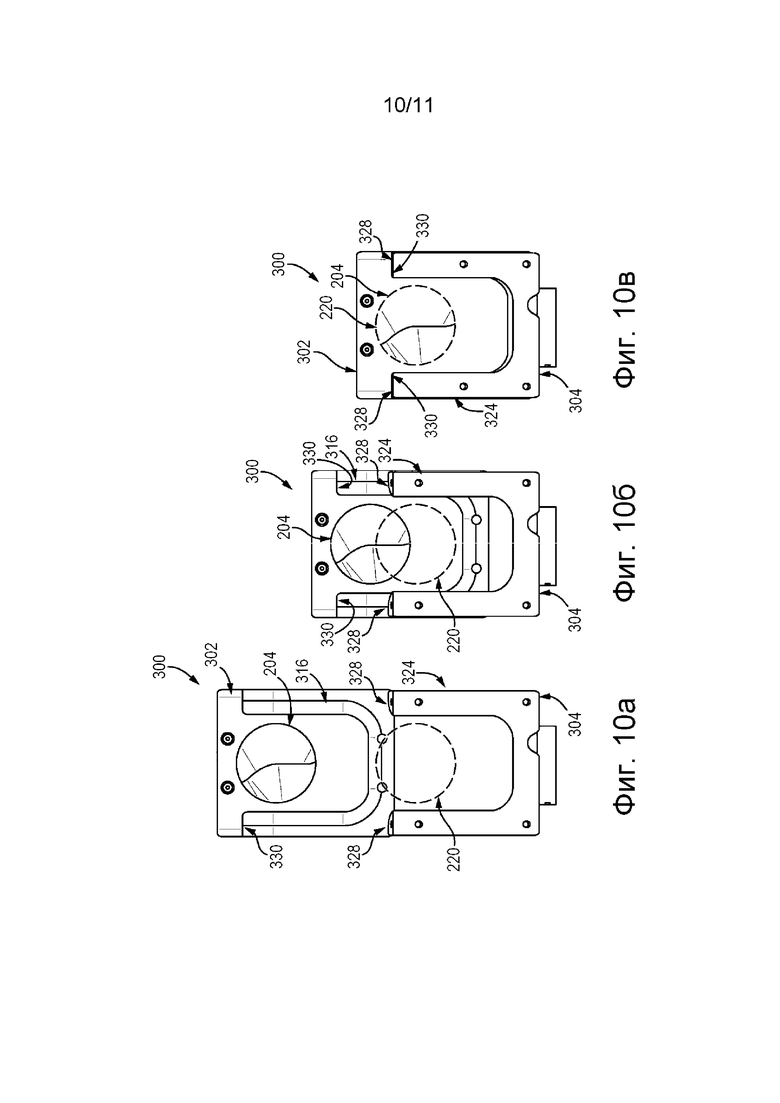
[042] На фиг. 10а представлен вид спереди соединительной системы, изображенной на фиг. 7, в положении ввода в соответствии с некоторыми вариантами осуществления настоящей технологии.
[043] На фиг. 10б представлен вид спереди соединительной системы, изображенной на фиг. 7, в промежуточном положении в соответствии с некоторыми вариантами осуществления настоящей технологии.
[044] На фиг. 10в представлен вид спереди соединительной системы, изображенной на фиг. 7, в совмещенном положении в соответствии с некоторыми вариантами осуществления настоящей технологии.
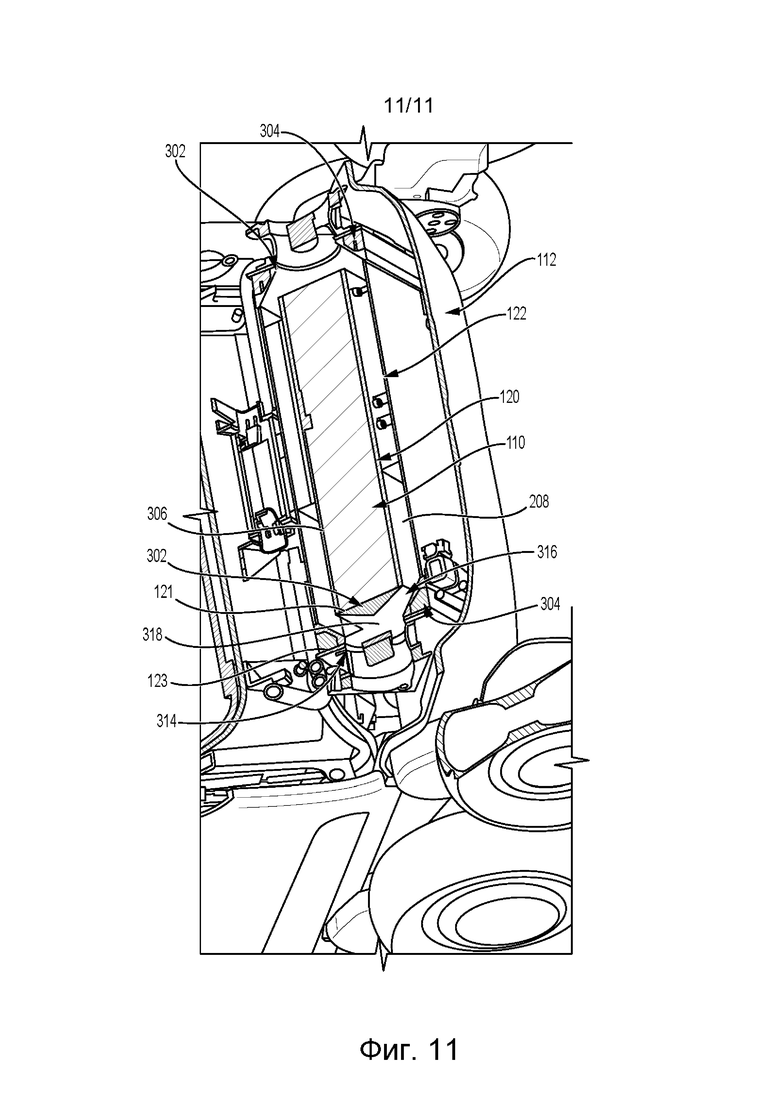
[045] На фиг. 11 представлен аксонометрический вид системы охлаждения и соединительной системы роботизированного транспортного средства, изображенного на фиг. 1, в соответствии с некоторыми вариантами осуществления настоящей технологии.
Осуществление изобретения
[046] Ниже со ссылкой на приложенные чертежи приводится более подробное описание различных иллюстративных вариантов реализации раскрытой технологии. При этом настоящая технология может быть реализована в самых разных формах и не должна считаться ограниченной рассмотренными в настоящем документе иллюстративными вариантами. Размеры и соотношение размеров слоев и областей на чертежах могут быть увеличены для наглядности. Нумерация элементов является сквозной.
[047] Представленные здесь примеры и условный язык предназначены для обеспечения лучшего понимания принципов настоящей технологии, а не для ограничения ее объема до таких специально приведенных примеров и условий. Очевидно, что специалисты в данной области техники способны разработать различные способы и устройства, которые явно не описаны и не показаны, но реализуют принципы настоящей технологии в пределах ее существа и объема.
[048] Чтобы способствовать лучшему пониманию, последующее описание может содержать упрощенные варианты реализации настоящей технологии. Специалисты в данной области должны понимать, что различные варианты осуществления настоящей технологии могут быть значительно сложнее.
[049] В некоторых случаях приводятся предположительно полезные примеры модификаций настоящей технологии. Они призваны способствовать пониманию и также не определяют объема или границ настоящей технологии. Представленный перечень модификаций не является исчерпывающим и специалист в данной области может разработать другие модификации в пределах объема настоящей технологии. Кроме того, если в некоторых случаях модификации не описаны, это не означает, что они невозможны и/или что описание содержит единственно возможный вариант реализации того или иного элемента настоящей технологии.
[050] Следует понимать, что для описания различных элементов в настоящем документе могут использоваться термины «первый», «второй», «третий» и т.д., но такое описание не должно считаться носящим ограничительный характер. Эти термины служат лишь для указания на различие между элементами. Таким образом, без отступления от существа и объема настоящей технологии рассматриваемый ниже первый элемент может быть назван вторым элементом. В данном контексте термин «и/или» означает все без исключения комбинации одного или нескольких относящихся к нему перечисленных элементов.
[051] Следует понимать, что когда тот или иной элемент описан как «соединенный» или «связанный» с другим элементом, он может быть соединен или связан с другим элементом как непосредственно, так и через промежуточные элементы. Когда же тот или иной элемент описан как «непосредственно соединенный» или «непосредственно связанный» с другим элементом, это означает, что промежуточные элементы отсутствуют. Другие слова, используемые для описания взаимосвязи между элементами, следует интерпретировать аналогичным образом (например, «между» и «непосредственно между», «вблизи» и «в непосредственной близи» и т.д.).
[052] Используемая здесь терминология предназначена исключительно для описания отдельных иллюстративных вариантов реализации изобретения и не носит ограничительного характера для настоящей технологии. Формы единственного числа включают в себя и формы множественного числа, если из контекста явно не следует иное. Кроме того, следует понимать, что термины «содержит/включает в себя» и/или «содержащий/включающий в себя» в контексте настоящего описания указывают на наличие указанных признаков, частей изобретения, шагов, операций, элементов и/или компонентов, но не исключают наличия или возможности добавления одного или нескольких других признаков, частей изобретения, шагов, операций, элементов, компонентов и/или их групп.
[053] Функции различных элементов, показанных на чертежах, включая все функциональные блоки, обозначенные как «процессор», могут быть реализованы с использованием специализированных аппаратных средств, а также аппаратных средств, способных обеспечивать работу соответствующего программного обеспечения. Если используется процессор, эти функции могут выполняться одним выделенным процессором, одним совместно используемым процессором или несколькими отдельными процессорами, некоторые из которых могут использоваться совместно. В некоторых вариантах осуществления настоящей технологии процессор может представлять собой процессор общего назначения, например, центральный процессор, или процессор, предназначенный для решения конкретной задачи, например, цифровой сигнальный процессор. Кроме того, явное использование термина «процессор» не должно трактоваться как указание исключительно на аппаратные средства, способные обеспечивать работу программного обеспечения, и может подразумевать, среди прочего, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), ПЗУ для хранения программного обеспечения, ОЗУ и энергонезависимое ЗУ. Также могут подразумеваться другие аппаратные средства, общего назначения и/или заказные.
[054] Описание принципов, аспектов и вариантов реализации настоящей технологии, а также их конкретные примеры предназначены для охвата их структурных и функциональных эквивалентов, независимо от того, известны они в настоящее время или будут разработаны в будущем.
[055] С учетом вышеизложенных принципов ниже рассмотрены некоторые не имеющие ограничительного характера примеры, иллюстрирующие различные варианты реализации аспектов настоящего изобретения.
[056] На фиг. 1–3 представлены изображения транспортного средства 100 в соответствии с настоящей технологией. Роботизированное транспортное средство 100 содержит кузов 102 и крышку 104. В зависимости от решаемых задач, возможны и другие конфигурации. Показанное роботизированное транспортное средство 100 может использоваться, в частности, для перемещения грузов (например, почты, продуктов, посылок, пакетов, цветов, медицинского оборудования и/или покупок). Как можно видеть, крышка 104 шарнирно соединена с кузовом 102, вследствие чего крышка 104 может находиться в закрытом положении (фиг.1 и фиг. 3) и в открытом положении (фиг. 2). Следует понимать, что без отступления от существа и объема настоящей технологии крышка 104 может иметь и другую конструкцию. Когда крышка 104 находится в открытом положении, обеспечивается доступ к внутреннему пространству 106 для размещения и/или извлечения товаров 108. Товарами 108 могут быть, например, продукты питания, напитки и/или товары длительного пользования.
[057] В нижней части роботизированного транспортного средства 100 расположено шасси 114. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии предусмотрены три комплекта или пары колес, а именно колеса 116, колеса 117 и колеса 118. Роботизированное транспортное средство 100 также содержит световые или сигнальные элементы, которые служат для предоставления визуальной информации человеку или людям, находящимся в окружающем пространстве роботизированного транспортного средства 100. Предполагается, что к шасси 114 могут крепиться различные системы и элементы роботизированного транспортного средства 100, такие как система подвески, аккумуляторная батарея, панели наружной обшивки, электронные элементы и каркас корпуса, но не ограничиваясь ими. В некоторых вариантах реализации изобретения шасси 114 может быть изготовлено из алюминия. В других вариантах реализации изобретения как кузов 102, так и шасси 114 могут быть изготовлены из стеклопластика.
[058] Роботизированное транспортное средство 100 может представлять собой полностью автономное транспортное средство, способное передвигаться в процессе эксплуатации независимо от решений, принимаемых человеком, или частично автономное транспортное средство, в котором человек-оператор может выборочно осуществлять дистанционное управление некоторыми аспектами функционирования роботизированного транспортного средства, а другие аспекты при этом автоматизированы, либо человек-оператор может брать на себя управление при определенных условиях, например, если роботизированное транспортное средство 100 застряло и не в состоянии определить в автономном режиме, как двигаться дальше. Одним из не имеющих ограничительного характера примеров является роботизированное транспортное средство 100, которое может функционировать автономно до тех пор, пока не возникнет неожиданная или необычная ситуация, с которой оно не способно справиться самостоятельно, и не потребуется дистанционное вмешательство человека-оператора. Следует отметить, что при этом не накладывается ограничений на конкретные параметры роботизированного транспортного средства 100, к числу которых, например, относятся производитель, модель, год выпуска, масса транспортного средства, размеры транспортного средства, распределение массы транспортного средства, площадь поверхности транспортного средства, высота транспортного средства, тип двигателя, вид шин (если они используются), система питания и прочие характеристики или параметры транспортного средства. Роботизированным транспортным средством 100 может быть любое роботизированное транспортное средство, предназначенное для доставки грузов, работы на складе и т.д.
[059] Роботизированное транспортное средство 100 также содержит компьютерный процессор 110, размещенный в корпусе 120. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии корпус 120 может располагаться внутри кузова 102 роботизированного транспортного средства 100. Как показано на фиг. 3, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии корпус 120 может съемно устанавливаться в кузове 102, что позволяет подсоединять и отсоединять корпус 120 (и, соответственно, компьютерный процессор 110) для технического обслуживания и/или ремонта компьютерного процессора 110. В частности, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии корпус 120 размещен в кожухе 122, расположенном в кузове 102 роботизированного транспортного средства 100. Например, кожух 122 может располагаться в передней части 112, обеспечивая удобный доступ к корпусу 120 и к компьютерному процессору 110 в ходе технического обслуживания роботизированного транспортного средства. При этом предполагается, что в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии компьютерный процессор 110 может быть размещен в другой части кузова 102 роботизированного транспортного средства 100.
[060] В по меньшей мере некоторых не имеющих ограничительного характера вариантах реализации настоящей технологии компьютерный процессор 110 связан с системами управления роботизированного транспортного средства 100. Компьютерный процессор 110 способен управлять различными рабочими системами роботизированного транспортного средства 100, включая систему управления двигателем, системы рулевого управления, а также системы освещения и сигнализации, но не ограничиваясь ими.
[061] В соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии, на реализацию компьютерного процессора 110 не накладывается особых ограничений. Например, компьютерный процессор 110 может быть реализован в виде блока управления двигателем транспортного средства, центрального процессора транспортного средства, компьютерного процессора, встроенного в роботизированное транспортное средство 100, съемного блока управления и т.д.
[062] В некоторых вариантах реализации изобретения компьютерный процессор 110 является частью бортовой компьютерной системы. В некоторых вариантах осуществления настоящей технологии компьютерная система может быть по меньшей мере частично размещена в корпусе 120. Компьютерная система может включать в себя один или несколько процессоров, устройство хранения данных и память. Иными словами, компьютерная система содержит аппаратные средства и/или программное обеспечение и/или микропрограммное обеспечение либо их комбинацию для осуществления обработки данных и выполнения различных действий в зависимости от обрабатываемых данных. Например, компьютерный процессор 110 может получать данные от одного или нескольких датчиков и/или серверов, обрабатывать полученные данные и обеспечивать перемещение роботизированного транспортного средства 100 на основе обработанных данных. Компьютерный процессор 110 может использовать ряд датчиков и систем для сбора информации об окружающем пространстве роботизированного транспортного средства 100. Роботизированное транспортное средство 100 оборудовано множеством датчиков (не обозначены). Следует отметить, что для сбора различных видов данных об окружающем пространстве роботизированного транспортного средства 100 могут применяться различные системы датчиков. Предполагается, что на роботизированном транспортном средстве 100 множество различных систем датчиков может использоваться совместно. Следует понимать, что в некоторых вариантах осуществления настоящей технологии дополнительные электронные элементы компьютерной системы могут выделять тепло при функционировании роботизированного транспортного средства 100. Например, в некоторых вариантах осуществления компьютерная система может содержать устройство хранения данных, в частности, твердотельный накопитель или жесткий диск, выделяющие тепло во время работы. В некоторых вариантах осуществления устройство хранения данных по меньшей мере частично размещено в корпусе 120.
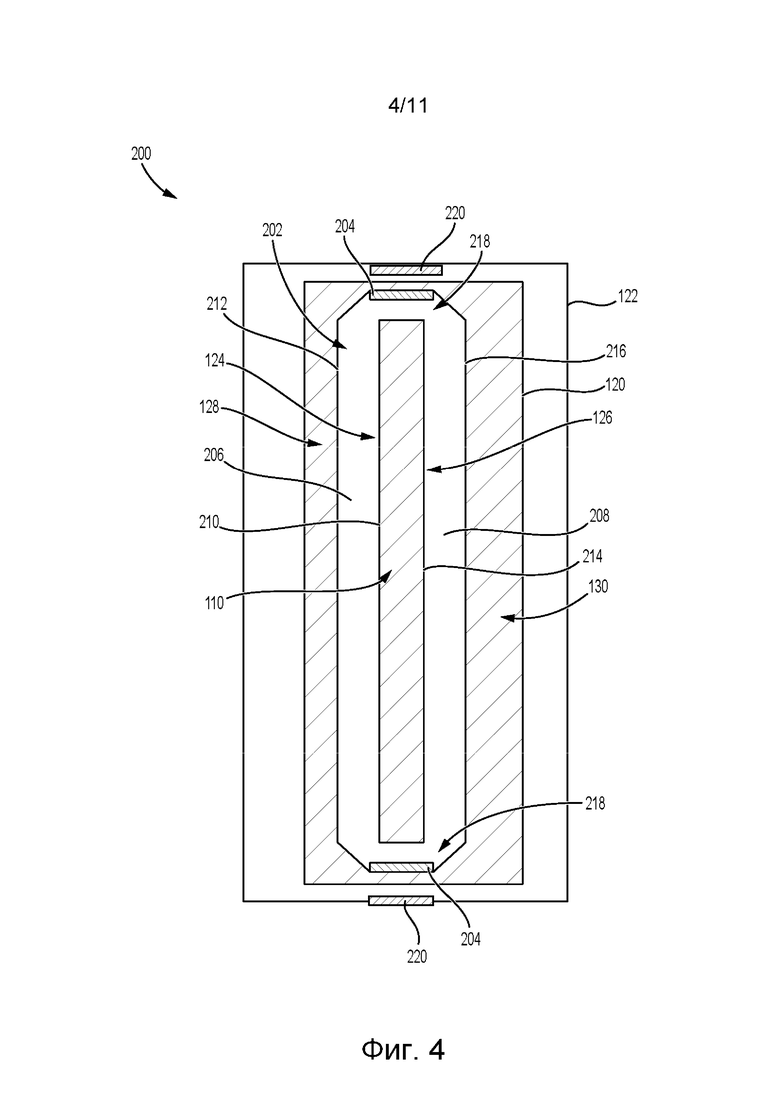
[063] В процессе управления различными рабочими системами роботизированного транспортного средства 100 компьютерный процессор 110 выделяет тепло. Как показано на фиг. 4, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, роботизированное транспортное средство 100 содержит систему 200 охлаждения для предотвращения перегрева и снижения риска повреждения компьютерного процессора 110.
[064] В общем случае система 200 охлаждения содержит канал 202 охлаждения для охлаждения компьютерного процессора 110 и имеет выходное отверстие 204 канала, сообщающееся по текучей среде с каналом 202 охлаждения для подачи охлаждающей среды в канал 202 охлаждения. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии канал 202 охлаждения сформирован внутри корпуса 120 и окружает компьютерный процессор 110.
[065] В некоторых не имеющих ограничительного характера вариантах осуществления канал 202 охлаждения образован двумя каналами 206, 208, сообщающимися друг с другом по текучей среде. Первый канал 206 проходит вдоль первой поверхности 124 компьютерного процессора 110. В некоторых не имеющих ограничительного характера вариантах осуществления одна боковая стенка 210 первого канала 206 образована первой поверхностью 124 компьютерного процессора 110, а противоположная боковая стенка 212 первого канала 206 – первой боковой стенкой 128 корпуса 120. Подобным образом, второй канал 208 проходит вдоль второй поверхности 126 компьютерного процессора 110. Одна боковая стенка 214 второго канала 208 образована второй поверхностью 126 компьютерного процессора 110, а противоположная боковая стенка 216 – второй боковой стенкой 130 корпуса 120. В других не имеющих ограничительного характера вариантах осуществления первый и второй каналы 206, 208 могут проходить вдоль первой и второй поверхностей 124, 126, соответственно. В некоторых не имеющих ограничительного характера вариантах осуществления каждый из первого и второго каналов 206, 208 полностью окружает соответствующие поверхности 124, 126 компьютерного процессора 110. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии первый и второй каналы 206, 208 могут иметь разные формы. Например, первый и второй каналы 206, 208 могут иметь змеевидную форму на соответствующих поверхностях 124, 126. В дополнительных не имеющих ограничительного характера вариантах осуществления настоящей технологии система 200 охлаждения может содержать единственный канал, проходящий вдоль одной из поверхностей компьютерного процессора 110. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии система 200 охлаждения может содержать более двух каналов, распределенных по соответствующим поверхностям 124, 126.
[066] Как показано на фиг. 4, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии система 200 охлаждения имеет два выходных отверстия 204 канала, сообщающихся по текучей среде с каналом 202 охлаждения для подачи охлаждающей среды. В частности, каждое из двух выходных отверстий 204 канала сообщается по текучей среде с каждым из двух каналов 206, 208 канала 202 охлаждения. Как показано на фиг. 4, выходные отверстия 204 канала расположены на противоположных сторонах корпуса 120. При этом без отступления от существа и объема настоящей технологии возможны альтернативные варианты расположения выходных отверстий 204 канала.
[067] Система 200 охлаждения дополнительно содержит две камеры 218, расположенные на противоположных сторонах корпуса 120, которые связывают по текучей среде два канала 206, 208 с выходными отверстиями 204 канала. Кроме того, камеры 218 связывают по текучей среде каналы 206 и 208 друг с другом. Следует понимать, что в других не имеющих ограничительного характера вариантах осуществления настоящей технологии могут использоваться другие конструкции камер 218. В других альтернативных не имеющих ограничительного характера вариантах осуществления камеры 218 могут отсутствовать.
[068] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, в системе 200 охлаждения также предусмотрено выходное отверстие 220, расположенное в кожухе 122 роботизированного транспортного средства 100. Как показано на фиг. 4, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии в системе 200 охлаждения имеются два выходных отверстия 220, расположенных на противоположных сторонах кожуха 122. Каждое выходное отверстие 220 совмещается с соответствующим выходным отверстием 204 канала, благодаря чему одно выходное отверстие 220 сообщается по текучей среде с одним выходным отверстием 204 канала для подачи охлаждающей среды в канал 202 охлаждения. В частности, каждое выходное отверстие 220 совмещается с соответствующим выходным отверстием 204 канала, когда корпус 120 устанавливается в кожухе 122 (размещается в нем), вследствие чего между каждым выходным отверстием 220 и каналом 202 охлаждения обеспечивается сообщение по текучей среде (через соответствующее выходное отверстие 204). В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии охлаждающей средой может быть любое вещество, обеспечивающее отвод тепла от компьютерного процессора 110, например, охлаждающей средой может быть воздух или диэлектрическая жидкость.
[069] На фиг. 5–10 представлены не имеющие ограничительного характера варианты осуществления соединительной системы 300 роботизированного транспортного средства 100. В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления, соединительная система 300 связана с корпусом 120 и с кожухом 122 для обеспечения надлежащего положения и ориентации корпуса 120 при его установке в кожух 122. Соединительная система 300 дополнительно обеспечивает быстрое соединение корпуса 120 с кожухом 122, а также их быстрое разъединение при техническом обслуживании и ремонте компьютерного процессора 110.
[070] Как показано на фиг. 5 и 6, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии соединительная система 300 содержит первый соединительный элемент 302 (показан на фиг. 5) и второй соединительный элемент 304 (показан на фиг. 6). Первый соединительный элемент 302 и второй соединительный элемент 304 комплементарны друг другу, что позволяет выборочно соединять их друг с другом разъемным образом и, как следствие, обеспечивает быстрое соединение и/или разъединение корпуса 120 и кожуха 122. В некоторых вариантах осуществления первый соединительный элемент 302 может сдвигаться относительно второго соединительного элемента 304. Иными словами, первый соединительный элемент 302 может вдвигаться во второй соединительный элемент 304. В некоторых вариантах осуществления такое соединение первого соединительного элемента 302 со вторым соединительным элементом 304 обеспечивает возможность соединения корпуса 120 с кожухом 122 одной рукой.
[071] Как показано на фиг. 7 и 9, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый соединительный элемент 302 может располагаться на корпусе 120. Как показано на фиг. 7, в некоторых не имеющих ограничительного характера вариантах осуществления первый соединительный элемент 302 съемно закреплен на части наружной поверхности одной из боковых стенок 121 корпуса 120. Например, первый соединительный элемент 302 может быть закреплен на наружной поверхности с помощью крепежных элементов, таких как болты или винты. В других не имеющих ограничительного характера вариантах осуществления первый соединительный элемент 302 может быть закреплен на части наружной поверхности одной из боковых стенок 121 корпуса 120 несъемным образом, например, приварен, приклеен и т.п. В других не имеющих ограничительного характера вариантах осуществления первый соединительный элемент 302 образует по меньшей мере часть одной из боковых стенок 121 корпуса 120.
[072] На фиг. 5 и фиг. 8а–8в изображен первый соединительный элемент 302 в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии. В некоторых не имеющих ограничительного характера вариантах осуществления первый соединительный элемент 302 имеет корпус. Корпус первого соединительного элемента 302 включает в себя первую часть 306 корпуса, вторую часть 308 корпуса и расположенную между ними промежуточную часть 310 корпуса. В некоторых не имеющих ограничительного характера вариантах осуществления первая часть 306 корпуса, вторая часть 308 корпуса и промежуточная часть 310 корпуса образуют единое целое. Таким образом, можно утверждать, что первая часть 306 корпуса, вторая часть 308 корпуса и промежуточная часть 310 корпуса могут формироваться совместно. В других не имеющих ограничительного характера вариантах осуществления первая часть 306 корпуса, вторая часть 308 корпуса и промежуточная часть 310 корпуса состоят из множества деталей, соединенных вместе. Таким образом, можно утверждать, что первый соединительный элемент 302 может быть собран из первой части корпуса 306, второй части корпуса 308 и промежуточной части корпуса 310.
[073] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии система 200 охлаждения связана с соединительной системой 300. Иными словами, соединительная система 300 содержит элементы системы 200 охлаждения.
[074] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый соединительный элемент 302 содержит камеру 218 и имеет выходное отверстие 204 канала. В частности, выходное отверстие 204 канала расположено в первой части 306 корпуса, а камера 218 образована промежуточной частью 310 корпуса.
[075] Как показано на фиг. 8в, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии вторая часть 308 корпуса имеет отверстия, обеспечивающие сообщение по текучей среде камеры 218 с первым и вторым каналами 206, 208 системы 200 охлаждения. В частности, вторая часть 308 корпуса имеет первое отверстие 312, связывающее по текучей среде первый канал 206 с камерой 218, и второе отверстие 314, связывающее по текучей среде второй канал 206 с камерой 218.
[076] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый соединительный элемент 302 содержит канавку 316, комплементарную соответствующей части второго соединительного элемента 304 (который более подробно описан ниже). Канавка 316 выполнена с возможностью зацепления и разъемного соединения с соответствующей частью второго соединительного элемента 304 для обеспечения быстрого соединения и разъединения первого и второго соединительных элементов 302, 304 и/или для облегчения позиционирования первого и второго соединительных элементов 302, 304 (и, соответственно, корпуса 120 и кожуха 122).
[077] Канавка 316 проходит вдоль части первого соединительного элемента 302. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии канавку 316 образует корпус первого соединительного элемента 302. Канавка 316 может проходить от внутренней к наружной поверхности корпуса. В некоторых случаях канавка 316 проходит по всей ширине корпуса. Иными словами, канавка 316 образована двумя стенками. В других случаях канавка 316 частично проходит в направлении противоположной поверхности и, таким образом, формируется тремя стенками.
[078] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии канавка 316 проходит от первой части 306 корпуса до второй части 308 корпуса. Как показано на фиг. 8б, канавка 316 проходит от наружной поверхности 318 первой части 306 корпуса до внутренней поверхности 320 второй части 308 корпуса. В некоторых не имеющих ограничительного характера вариантах осуществления канавка 316 проходит вдоль части внешнего периметра первого соединительного элемента 302. Например, как показано на фиг. 5 и фиг. 8а, канавка 316 непрерывна и имеет U-образную форму. Канавка 316 проходит вдоль трех краев первого соединительного элемента 302. Как показано на фиг. 8б, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии канавка 316 дополнительно имеет скошенную часть 322, образующую наружную стенку промежуточной части 310 корпуса. Следует понимать, что без отступления от существа и объема настоящей технологии могут быть реализованы и другие формы канавки 316. Например, в других не имеющих ограничительного характера вариантах осуществления настоящей технологии канавка 316 может иметь прямолинейную форму и проходить вдоль одного края первого соединительного элемента 302.
[079] Как показано на фиг. 6 и фиг. 8, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, второй соединительный элемент 304 может располагаться на кожухе 122. В частности, в некоторых не имеющих ограничительного характера вариантах осуществления второй соединительный элемент 304 расположен на боковой стенке кожуха 122. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии второй соединительный элемент 304 закреплен на части внутренней поверхности одной из боковых стенок 123 кожуха 122. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии второй соединительный элемент 304 образует по меньшей мере часть одной из боковых стенок 123 кожуха 122.
[080] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, второй соединительный элемент 304 обеспечивает сообщение по текучей среде между выходным отверстием 220 и выходным отверстием 204 канала. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии второй соединительный элемент 304 предотвращает перекрытие выходного отверстия 220. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии второй соединительный элемент 304 может иметь выходное отверстие, совмещаемое с выходным отверстием 220 кожуха 120, обеспечивая сообщение по текучей среде, когда первый соединительный элемент 302 вставлен во второй соединительный элемент 304.
[081] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии второй соединительный элемент 304 содержит направляющую 324. Направляющая 324 геометрически комплементарна канавке 316 первого соединительного элемента 302. В некоторых не имеющих ограничительного характера вариантах осуществления весь второй соединительный элемент 304 представляет собой направляющую 324. Например, как показано на фиг. 6, второй соединительный элемент 304 представляет собой непрерывную направляющую 324 U-образной формы. Направляющая 324 дополнительно имеет скошенную часть 326 (комплементарную по форме скошенной части 322 канавки). U-образная форма направляющей 324 (и, соответственно, второго соединительного элемента 304) предотвращает перекрывание выходного отверстия 220 кожуха 122, обеспечивая сообщение по текучей среде между выходным отверстием 204 канала и выходным отверстием 220, когда первый соединительный элемент 302 вставлен во второй соединительный элемент 304. Следует понимать, что без отступления от существа и объема настоящей технологии направляющая 324 может иметь и другие формы.
[082] Направляющая 324 второго соединительного элемента 304, взаимодействуя с канавкой 316 первого соединительного элемента 302, направляет первый соединительный элемент 302 в процессе ввода (и, таким образом, направляет корпус 120 при установке в кожух 122). Благодаря направляющей 324 первый соединительный элемент 302 занимает требуемое положение, что обеспечивает надлежащую установку корпуса 120 в кожух 122. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии при надлежащем размещении корпуса 120 в кожухе 122 выходное отверстие 220 кожуха 122 совмещено с выходным отверстием 204 канала на первом соединительном элементе 302.
[083] Следует понимать, что в других не имеющих ограничительного характера вариантах осуществления настоящей технологии первый и второй соединительные элементы 302, 304 могут разъемным образом зацепляться при сопряжении иным образом.
[084] На фиг. 10а–10в показан процесс введения первого соединительного элемента 302 во второй соединительный элемент 304 в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии. В частности, как показано на фиг. 10а, первый соединительный элемент 302 сначала располагается в положении ввода напротив второго соединительного элемента 304. Иными словами, первый соединительный элемент 302 располагается так, чтобы канавка 316 совмещалась с направляющей 324 второго соединительного элемента 304. На фиг. 10б показано промежуточное положение, занимаемое элементами при вхождении первого соединительного элемента 302 во второй соединительный элемент 304. В этом положении канавка 316 и направляющая 324 зацепляются друг с другом, в результате чего направляющая 324 направляет первый соединительный элемент 302 вдоль канавки 316 в процессе ввода. Как показано на фиг. 10в, первый соединительный элемент 302 продвигается до положения совмещения, в котором упорная поверхность 328 направляющей 324 соприкасается с упорной поверхностью 330 канавки 316, что вызывает прекращение продвижения и, в некоторых не имеющих ограничительного характера вариантах осуществления, совмещение выходного отверстия 220 с выходным отверстием 204 канала.
[085] Как показано на фиг. 11, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии соединительная система 300 содержит два первых соединительных элемента 302 и два комплементарных вторых соединительных элемента 304. Два первых соединительных элемента 302 расположены на противоположных сторонах корпуса 120. Два вторых соединительных элемента 304 подобным образом расположены на противоположных сторонах кожуха 122. Следует понимать, что в других не имеющих ограничительного характера вариантах осуществления настоящей технологии два первых соединительных элемента 302 не обязательно должны располагаться на противоположных сторонах корпуса 120, а два вторых соединительных элемента 304 так же не обязательно должны располагаться на противоположных сторонах кожуха 122. Например, два первых и вторых соединительных элемента 302, 304 могут располагаться на смежных боковых стенках корпуса 120 и кожуха 122, соответственно. Также следует понимать, что без отступления от существа и объема настоящей технологии может быть реализовано любое количество первых и вторых соединительных элементов 302, 304. Например, соединительная система 300 может содержать один первый соединительный элемент 302 и один второй соединительный элемент 304.
[086] Следует понимать, что в других не имеющих ограничительного характера вариантах осуществления настоящей технологии без отступления от ее существа и объема система 200 охлаждения и соединительная система 300 не обязательно должны быть связанными друг с другом и могут быть реализованы независимо. Например, соединительная система 300 может содержать только первый соединительный элемент 302 с канавкой 316 и второй соединительный элемент 304 с комплементарной направляющей 324, а элементы системы 200 охлаждения могут размещаться в корпусе 120 и кожухе 122.
[087] Очевидно, что не все технические эффекты, упомянутые в настоящем документе, подлежат реализации в каждом конкретном варианте осуществления настоящей технологии.
[088] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОТКРЫВАЮЩИЙ МЕХАНИЗМ КРЫШКИ РОБОТИЗИРОВАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2810933C2 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО И ОПОРНЫЙ УЗЕЛ ЕГО КОЛЕСА | 2022 |
|
RU2830639C2 |
| Способ и процессор для классификации точек на границе многоугольного участка | 2023 |
|
RU2836700C1 |
| Колесный узел для роботизированного транспортного средства и оснащенное им роботизированное транспортное средство. | 2023 |
|
RU2831446C1 |
| Способ управления роботизированным транспортным средством | 2021 |
|
RU2808469C2 |
| СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-ИНВЕНТАРИЗАТОРОМ | 2023 |
|
RU2839294C1 |
| Лидарная система и способ с когерентным детектированием | 2020 |
|
RU2792949C2 |
| МУЛЬТИСПЕКТРАЛЬНЫЕ ЛИДАРНЫЕ СИСТЕМЫ И СПОСОБЫ | 2020 |
|
RU2792948C2 |
| ОПТИЧЕСКИЕ СИСТЕМЫ И СПОСОБЫ УПРАВЛЕНИЯ ИМИ | 2020 |
|
RU2793241C2 |
| ЛИДАРНАЯ СИСТЕМА И СПОСОБ КАЛИБРОВКИ ЛИДАРНОЙ СИСТЕМЫ | 2021 |
|
RU2829088C1 |
Изобретение относится к роботизированным транспортным средствам для доставки товаров пользователям. Роботизированное транспортное средство для доставки товаров содержит компьютерный процессор, корпус для размещения компьютерного процессора, первый соединительный элемент, расположенный на корпусе, кожух, размещенный в кузове роботизированного транспортного средства и выполненный с возможностью размещения в нем корпуса, и второй соединительный элемент, комплементарный первому соединительному элементу и расположенный на кожухе. Второй соединительный элемент выполнен с возможностью разъемного соединения с первым соединительным элементом, а также выполнен с возможностью направления и позиционирования корпуса совместно с первым соединительным элементом при установке корпуса в кожух. Достигается создание соединительной системы для установки компьютерного процессора в роботизированное ТС, обеспечивающей возможность подсоединения и отсоединения корпуса и, соответственно, компьютерного процессора, для его технического обслуживания и/или ремонта. 19 з.п. ф-лы, 11 ил.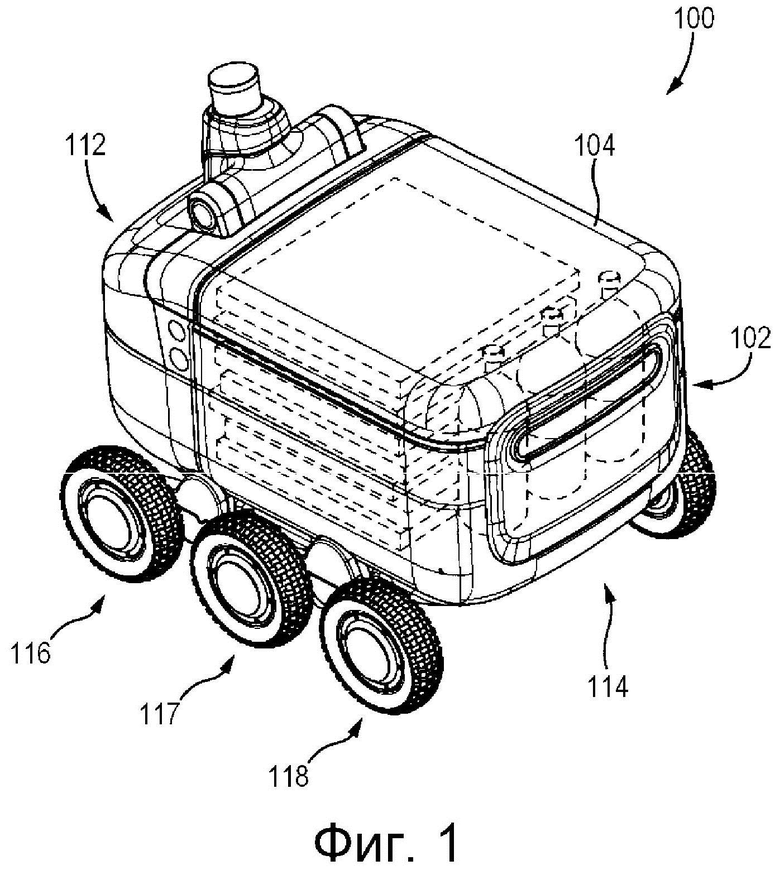
1. Роботизированное транспортное средство для доставки товаров, содержащее:
- компьютерный процессор;
- корпус для размещения компьютерного процессора;
- первый соединительный элемент, расположенный на корпусе;
- кожух, размещенный в кузове роботизированного транспортного средства и выполненный с возможностью размещения в нем корпуса; и
- второй соединительный элемент, комплементарный первому соединительному элементу и расположенный на кожухе, причем второй соединительный элемент выполнен с возможностью разъемного соединения с первым соединительным элементом, а также выполнен с возможностью направления и позиционирования корпуса совместно с первым соединительным элементом при установке корпуса в кожух.
2. Роботизированное транспортное средство по п. 1, в котором корпус содержит канал охлаждения для охлаждения компьютерного процессора, а первый соединительный элемент имеет выходное отверстие канала, сообщающееся по текучей среде с каналом охлаждения для подачи охлаждающей среды в канал охлаждения.
3. Роботизированное транспортное средство по п. 2, в котором канал охлаждения окружает компьютерный процессор и проходит по длине корпуса.
4. Роботизированное транспортное средство по п. 2, в котором кожух имеет выходное отверстие, сообщающееся по текучей среде с внешним каналом кузова роботизированного транспортного средства для подачи охлаждающей среды, а также сообщающееся по текучей среде с выходным отверстием канала для подачи охлаждающей среды в канал охлаждения.
5. Роботизированное транспортное средство по п. 4, в котором выходное отверстие кожуха и выходное отверстие канала первого соединительного элемента совмещены при соединении первого соединительного элемента и второго соединительного элемента.
6. Роботизированное транспортное средство по п. 2, в котором первый соединительный элемент содержит первую часть корпуса и вторую часть корпуса, между которыми расположена промежуточная часть корпуса, при этом в первой части корпуса имеется выходное отверстие канала, промежуточная часть корпуса образует камеру, сообщающуюся по текучей среде с выходным отверстием канала, а во второй части корпуса имеется отверстие, сообщающееся по текучей среде с камерой в промежуточной части корпуса и с каналом охлаждения корпуса.
7. Роботизированное транспортное средство по п. 6, в котором канал охлаждения содержит первый канал и второй канал, а отверстие во второй части корпуса включает в себя первое отверстие, сообщающееся по текучей среде с первым каналом, и второе отверстие, сообщающееся по текучей среде со вторым каналом.
8. Роботизированное транспортное средство по п. 6, в котором первая часть корпуса, вторая часть корпуса и промежуточная часть корпуса образуют единое целое.
9. Роботизированное транспортное средство по п. 1, в котором первый соединительный элемент содержит канавку, а второй соединительный элемент содержит направляющую, геометрически комплементарную канавке, вследствие чего направляющая способна направлять корпус компьютерного процессора при его установке в кожух за счет стыковки с канавкой первого соединительного элемента.
10. Роботизированное транспортное средство по п. 9, в котором первый соединительный элемент содержит первую часть корпуса и вторую часть корпуса, между которыми расположена промежуточная часть корпуса, а канавка проходит от наружной поверхности первой части корпуса до внутренней поверхности второй части корпуса.
11. Роботизированное транспортное средство по п. 10, в котором канавка имеет скошенную часть, образующую наружную стенку промежуточной части корпуса.
12. Роботизированное транспортное средство по п. 10, в котором первая часть корпуса, вторая часть корпуса и промежуточная часть корпуса образуют единое целое.
13. Роботизированное транспортное средство по п. 9, в котором канавка и направляющая являются непрерывными и имеют U-образную форму.
14. Роботизированное транспортное средство по п. 1, в котором первый соединительный элемент способен вдвигаться во второй соединительный элемент.
15. Роботизированное транспортное средство по п. 1, в котором корпус содержит два первых соединительных элемента, причем каждый из двух первых соединительных элементов расположен на наружной поверхности боковой стенки корпуса.
16. Роботизированное транспортное средство по п. 15, в котором кожух содержит два вторых соединительных элемента, причем каждый из двух вторых соединительных элементов расположен на боковой стенке кожуха.
17. Роботизированное транспортное средство по п. 16, в котором два первых соединительных элемента расположены на противоположных боковых стенках корпуса, а два вторых соединительных элемента - на внутренней поверхности противоположных боковых стенок кожуха.
18. Роботизированное транспортное средство по п. 1, в котором второй соединительный элемент установлен на внутренней поверхности кожуха.
19. Роботизированное транспортное средство по п. 1, в котором кожух расположен на передней панели кузова роботизированного транспортного средства.
20. Роботизированное транспортное средство по п. 1, в котором первый соединительный элемент и второй соединительный элемент разъемно соединены друг с другом для обеспечения быстрого соединения корпуса с кожухом.
| US 2021302971 A1, 30.09.2021 | |||
| US 20210197387 A1, 01.07.2021 | |||
| CN 206690067 U, 01.12.2017 | |||
| WO 2014090684 A1, 19.06.2014 | |||
| ОПЕРАЦИОННОЕ УСТРОЙСТВО ДЛЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2020 |
|
RU2757806C1 |

