Область техники, к которой относится изобретение
[001] Настоящая технология в целом относится к роботам, предназначенным для транспортировки различных предметов на складе из одного места в другое.
Уровень техники
[002] Роботы-инвентаризаторы широко используются для транспортировки различных предметов, хранящихся на складе, например, готовых изделий, сырья и т.п., из одного места склада в другое. В частности, такие роботы, как правило, включают в себя (1) подвижную платформу, позволяющую роботу-инвентаризатору перемещаться по проходам склада между рядами, (2) раму со стойкой, размещенной на подвижной платформе, и (3) контейнер или ящик, размещенный на стойке с возможностью скольжения и обеспечивающий транспортировку товаров на складе из одного места в другое, например, с места хранения в место обработки и/или отгрузки.
[003] Для обеспечения доступа к предметам, хранящимся на верхних полках склада, высота стойки робота превышает размер подвижной платформы, выполненной так, чтобы робот мог беспрепятственно перемещаться по складу. Как следствие, стойка колеблется во время движения робота. В некоторых случаях, при совпадении частот колебаний стойки и подвижной платформы, может возникать резонанс, приводящий к усилению колебаний стойки. По мере увеличения амплитуды и частоты колебаний стойки робот начинает наклоняться и в конечном итоге может опрокинуться. Это ставит под угрозу безопасность работников склада и способно приводить к повреждению складских стеллажей и/или перемещаемых роботом товаров.
[004] В известных технических решениях был предложен ряд способов для решения вышеуказанной технической проблемы.
[005] В патентной заявке US 2008223134 A1 «Method and device for testing the stability and/or bending strength of masts», опубликованной 18 сентября 2008 года (правообладатели Homburg Sven, Jost Gunther), раскрыт способ проведения динамических испытаний стоек на устойчивость и прочность при изгибе.
[006] В патентной заявке US 2017312922 A1 «Vibration measurement method for moving part, vibration measurement method for robot, and control device», опубликованной 2 ноября 2017 года (правообладатель Seiko Epson Corp.), раскрыт способ измерения вибрации подвижной части, в котором вибрация подвижной части измеряется с использованием первого инерциального датчика.
[007] В статье Pradeep K.W. Abeygunawardhana, Toshiyuki Murakami «Vibration suppression of two-wheel mobile manipulator using resonance-ratio-control-based null-space control», December 2010, IEEE Transactions on Industrial Electronics 57(12): 4137-4146, раскрыт двухколесный мобильный манипулятор, выполняющий функции многофункционального робота, в котором используется управление перевернутым маятником с регулированием положения центра тяжести для обеспечения равновесия робота, и описано подавление колебаний рабочих органов манипулятора.
[008] В патентной заявке US 2020376656 A1 «Mobile robot morphology», опубликованной 3 декабря 2020 года (правообладатель X DEV LLC), раскрыты подвижное основание, опорная колонна, закрепленная на подвижном основании, роботизированная рука с семью степенями свободы (7DOF), содержащая вращающееся сочленение, которое обеспечивает вращение роботизированной руки с семью степенями свободы относительно опорной колонны, и сенсорный блок, содержащий один или несколько датчиков.
[009] В патентной заявке US 2021403024 A1 «Hybrid autonomy system for autonomous and automated delivery vehicle», опубликованной 30 декабря 2021 года (правообладатель DoorDash Inc.), раскрыт способ управления автономным транспортным средством для доставки скоропортящихся товаров.
Раскрытие изобретения
[010] Целью настоящей технологии является устранение по меньшей мере части недостатков известных технических решений.
[011] В соответствии с широким аспектом настоящей технологии реализован способ управления роботизированным транспортным средством, содержащим платформу, выполненную с возможностью перемещения по поверхности склада, продольный корпус, размещенный на платформе, датчик, расположенный на продольном корпусе, и процессор, связанный с датчиком. Способ предусматривает получение сигнала, формируемого датчиком и характеризующего колебательное движение продольного корпуса при работе роботизированного транспортного средства на поверхности склада, и получение опорного сигнала, характеризующего нормальное рабочее состояние роботизированного транспортного средства. При выходе сигнала за пороговый интервал, заданный относительно опорного сигнала, предусмотрено изменение текущей скорости роботизированного транспортного средства для уменьшения колебательного движения продольного корпуса.
[012] В некоторых вариантах осуществления изменение текущей скорости роботизированного транспортного средства включает в себя уменьшение текущей скорости роботизированного транспортного средства.
[013] В некоторых вариантах осуществления продольный корпус имеет верхний конец и нижний конец, соединенный с платформой. Датчик представляет собой первый датчик, расположенный на верхнем конце продольного корпуса, а сигнал представляет собой первый сигнал, характеризующий колебательное движение верхнего конца продольного корпуса. Роботизированное транспортное средство дополнительно содержит второй датчик, связанный с процессором и расположенный на части продольного корпуса, находящейся между верхним концом и нижним концом. Способ предусматривает контроль второго сигнала, выдаваемого вторым датчиком и характеризующего колебательное движение этой части продольного корпуса. При выходе второго сигнала за второй пороговый интервал, заданный относительно второго опорного сигнала, предусмотрено изменение текущей скорости роботизированного транспортного средства для уменьшения колебательного движения этой части продольного корпуса.
[014] В некоторых вариантах осуществления способ предусматривает сравнение первого сигнала от первого датчика и второго сигнала от второго датчика и определение того, какой риск несут колебания продольного корпуса - повышенный или пониженный. Колебания с повышенным риском имеют место, когда первый и второй сигналы синфазны, а колебания с пониженным риском - когда первый и второй сигналы не синфазны.
[015] В некоторых вариантах осуществления, если определяется, что колебания несут повышенный риск, то в качестве порогового интервала принимается первый пороговый интервал повышенного риска, а в качестве второго порогового интервала - второй пороговый интервал повышенного риска, а если определяется, что колебания несут пониженный риск, то в качестве порогового интервала принимается первый пороговый интервал пониженного риска, а в качестве второго порогового интервала - второй пороговый интервал пониженного риска. Первый пороговый интервал пониженного риска отличается от первого порогового интервала повышенного риска, а второй пороговый интервал пониженного риска - от второго порогового интервала повышенного риска.
[016] В некоторых вариантах осуществления роботизированное транспортное средство дополнительно содержит третий датчик, связанный с процессором и расположенный в нижней части, находящейся между вторым датчиком и нижним концом. Способ предусматривает контроль третьего сигнала, выдаваемого третьим датчиком и характеризующего колебательное движение нижней части продольного корпуса. При выходе третьего сигнала за пороговый интервал, заданный относительно третьего опорного сигнала, предусмотрено изменение текущей скорости роботизированного транспортного средства для уменьшения колебательного движения нижней части продольного корпуса.
[017] В некоторых вариантах осуществления сигнал, формируемый датчиком, характеризует по меньшей мере одно из следующего: векторную скорость, угловую скорость, линейную скорость, смещение, угловое ускорение и линейное ускорение продольного корпуса.
[018] В некоторых вариантах осуществления дополнительно предусмотрено переопределение положения контейнера по длине продольного корпуса и отправка предупреждения оператору.
[019] В соответствии с другим широким аспектом настоящей технологии реализовано роботизированное транспортное средство для перемещения контейнеров по складу. Роботизированное транспортное средство содержит платформу, выполненную с возможностью перемещения по поверхности склада, продольный корпус, размещенный на платформе и предназначенный для размещения и перемещения контейнера, датчик, расположенный на продольном корпусе и предназначенный для формирования сигнала, характеризующего колебательное движение продольного корпуса, и по меньшей мере один процессор, связанный с датчиком. По меньшей мере один процессор способен принимать сигнал, формируемый датчиком, сравнивать этот сигнал с опорным сигналом и при выходе этого сигнала за пороговый интервал, заданный относительно опорного сигнала, изменять текущую скорость роботизированного транспортного средства для уменьшения колебательного движения продольного корпуса.
[020] В некоторых вариантах осуществления продольный корпус имеет верхний конец и нижний конец, соединенный с платформой. Датчик представляет собой первый датчик, предназначенный для формирования первого сигнала и расположенный на верхнем конце продольного корпуса так, чтобы первый сигнал, формируемый первым датчиком, характеризовал колебательное движение верхнего конца продольного корпуса.
[021] В некоторых вариантах осуществления роботизированное транспортное средство дополнительно содержит второй датчик, расположенный на части продольного корпуса, находящейся между верхним концом и нижним концом продольного корпуса, и предназначенный для формирования второго сигнала, характеризующего колебательное движение этой части продольного корпуса. По меньшей мере один процессор, связанный со вторым датчиком, способен принимать второй сигнал, формируемый вторым датчиком, сравнивать второй сигнал со вторым опорным сигналом и в случае выхода второго сигнала за второй пороговый интервал, заданный относительно второго опорного сигнала, изменять текущую скорость роботизированного транспортного средства для уменьшения колебательного движения этой части продольного корпуса.
[022] В некоторых вариантах осуществления первый и второй датчики равномерно распределены по длине продольного корпуса.
[023] В некоторых вариантах осуществления роботизированное транспортное средство дополнительно содержит третий датчик, расположенный в нижней части продольного корпуса, находящейся между нижним концом и вторым датчиком, и предназначенный для формирования третьего сигнала, характеризующего колебательное движение нижней части продольного корпуса, и по меньшей мере один процессор, связанный с третьим датчиком. По меньшей мере один процессор способен принимать третий сигнал, формируемый третьим датчиком, сравнивать третий сигнал с третьим опорным сигналом и в случае выхода третьего сигнала за третий пороговый интервал, заданный относительно третьего опорного сигнала, изменять текущую скорость роботизированного транспортного средства для уменьшения колебательного движения нижней части продольного корпуса.
[024] В некоторых вариантах осуществления первый, второй и третий датчики равномерно распределены по длине продольного корпуса.
[025] В некоторых вариантах осуществления продольный корпус является складным и содержит первый корпус, шарнирно соединенный со вторым корпусом.
[026] В некоторых вариантах осуществления длина продольного корпуса превышает длину платформы.
[027] В соответствии с еще одним широким аспектом настоящей технологии реализован способ управления роботизированным транспортным средством. Роботизированное транспортное средство содержит платформу, выполненную с возможностью перемещения по поверхности склада. От платформы отходит продольный корпус. На продольном корпусе расположен датчик, с которым связан процессор. Способ предусматривает получение сигнала, формируемого датчиком и характеризующего колебательное движение продольного корпуса при работе роботизированного транспортного средства на поверхности склада, и передачу этого сигнала для определения прогнозного класса в алгоритм машинного обучения, обученный определению принадлежности сигнала к первому или второму классу на основе обучающего сигнала и метки, характеризующей принадлежность обучающего сигнала к первому или второму классу. В зависимости от прогнозного класса, способ предусматривает изменение текущей скорости роботизированного транспортного средства для уменьшения колебательного движения продольного корпуса.
[028] В контексте настоящего описания термин «электронное устройство» используется для обозначения любых компьютерных аппаратных средств, способных обеспечивать работу программного обеспечения, подходящего для решения поставленной задачи. В контексте настоящего описания термин «электронное устройство» подразумевает, что устройство может функционировать в качестве сервера для других электронных и клиентских устройств, впрочем, это не носит обязательного характера для настоящей технологии. Таким образом, примерами (не имеющими ограничительного характера) электронных устройств являются персональные компьютеры (настольные компьютеры, ноутбуки, нетбуки и т.п.), смартфоны и планшеты, а также сетевое оборудование, например, маршрутизаторы, коммутаторы и шлюзы. Следует понимать, что в данном контексте факт функционирования оборудования в качестве электронного устройства не означает, что оно не может функционировать в качестве сервера для других электронных устройств. Употребление выражения «электронное устройство» не исключает использования нескольких клиентских устройств для приема, передачи, выполнения или инициирования выполнения каких-либо задач или запросов, результатов каких-либо задач или запросов либо шагов какого-либо описанного здесь способа.
[029] Здесь термины, относящиеся к пространственной ориентации, такие как вперед, назад, вверх, вниз, влево и вправо, соответствуют их общепринятому пониманию пользователем или оператором съемочного устройства. Термины, относящиеся к пространственной ориентации, при описании или указании элементов или подсистем устройства отдельно от этого устройства следует понимать так, словно эти элементы или подсистемы установлены в этом устройстве.
[030] Каждый вариант осуществления настоящей технологии относится к по меньшей мере одному из вышеупомянутых аспектов, но не обязательно ко всем ним. Следует понимать, что некоторые аспекты настоящей технологии, связанные с попыткой достижения вышеупомянутой цели, могут не соответствовать этой цели и/или могут соответствовать другим целям, не упомянутым здесь явным образом.
[031] Дополнительные и/или альтернативные признаки, аспекты и преимущества вариантов осуществления настоящей технологии содержатся в дальнейшем описании, на приложенных чертежах и в формуле изобретения.
Краткое описание чертежей
[032] Для обеспечения более полного понимания настоящей технологии, а также ее аспектов и дополнительных признаков предназначено следующее описание, которое следует использовать в сочетании с сопроводительными чертежами.
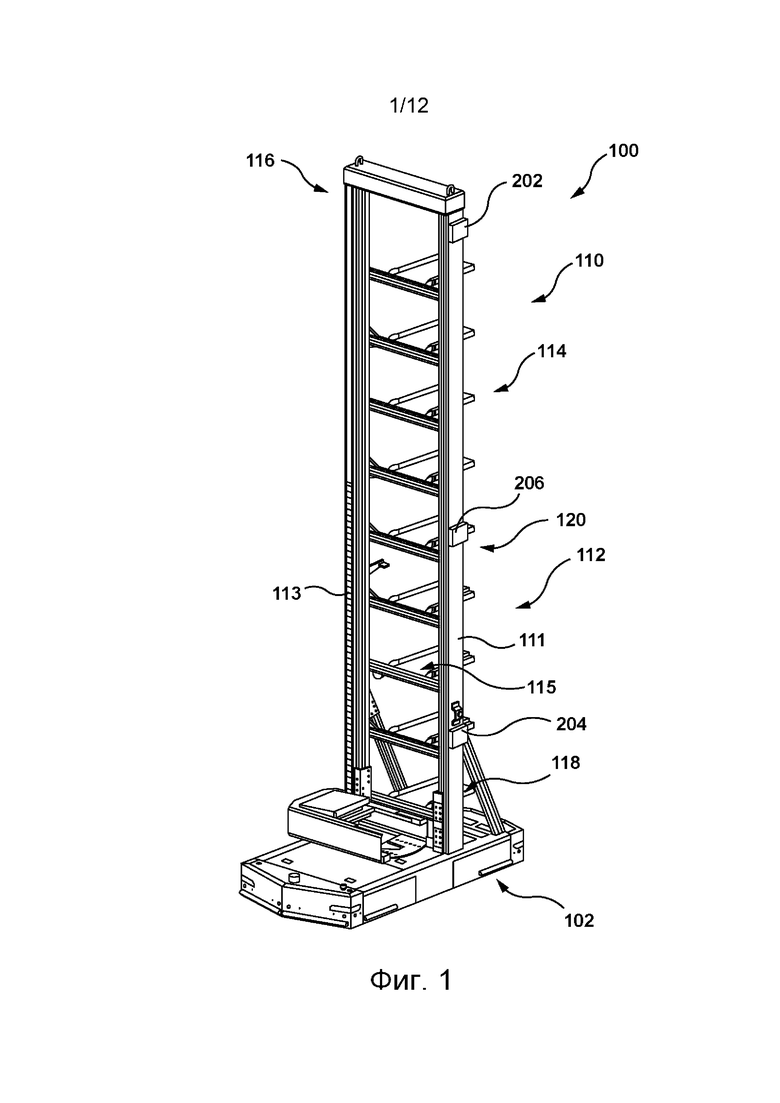
[033] На фиг. 1 представлен аксонометрический вид роботизированного транспортного средства в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[034] На фиг. 2 представлен вид спереди роботизированного транспортного средства, показанного на фиг. 1, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
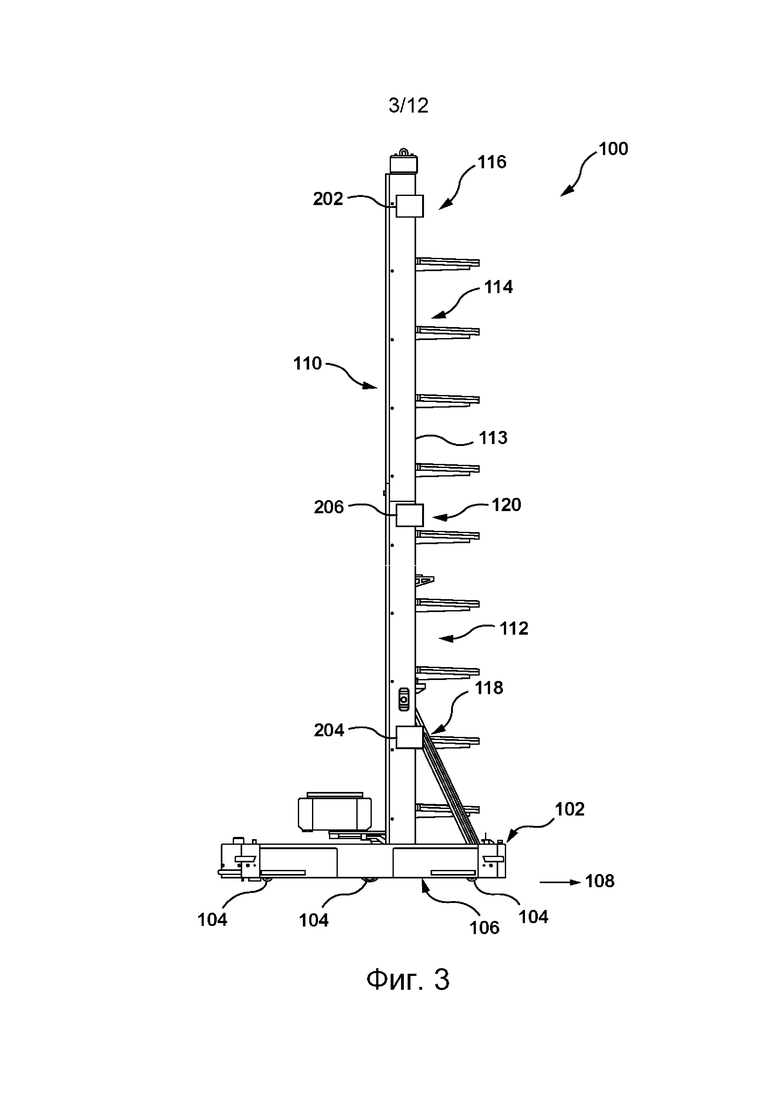
[035] На фиг. 3 представлен вид сбоку роботизированного транспортного средства, показанного на фиг. 1, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
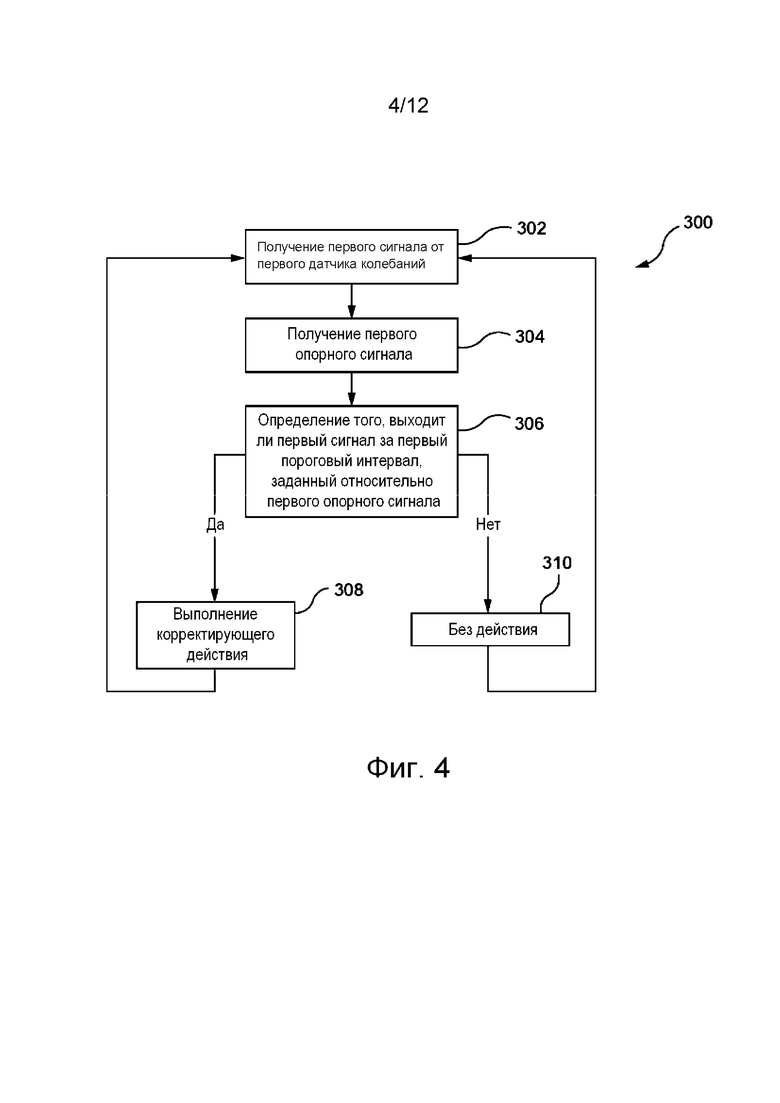
[036] На фиг. 4 представлена блок-схема процесса управления роботизированным транспортным средством при получении сигнала процессором роботизированного транспортного средства в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
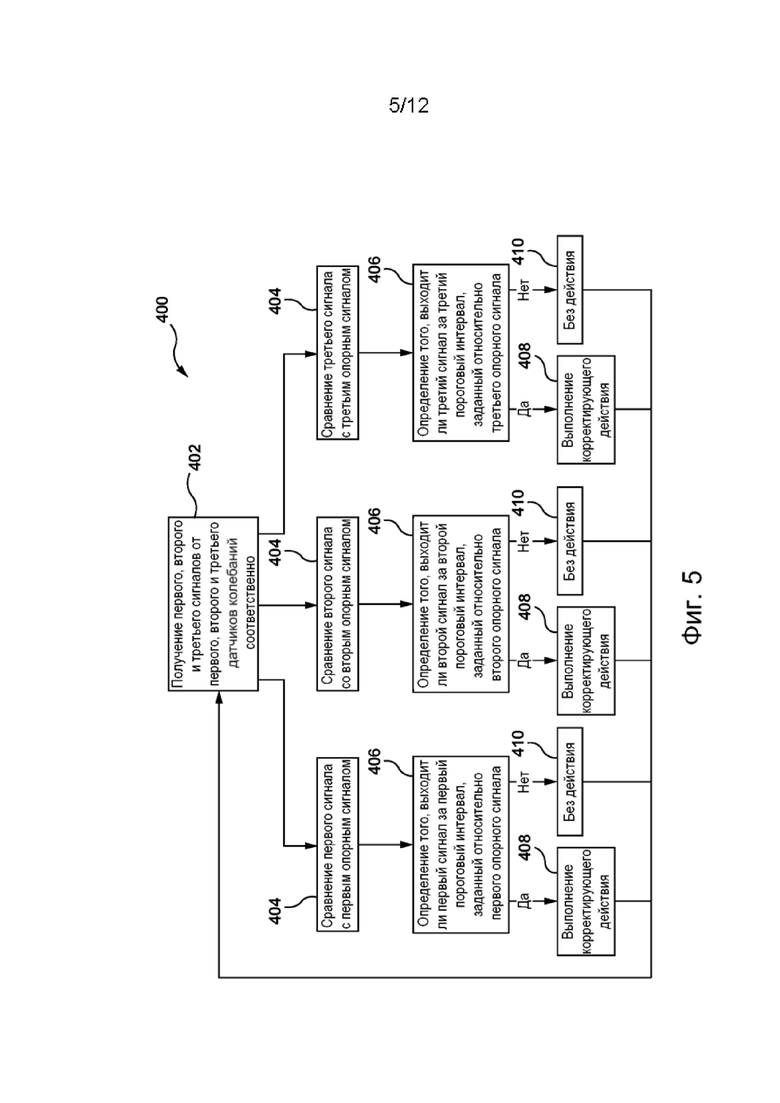
[037] На фиг. 5 представлена блок-схема процесса управления роботизированным транспортным средством при получении сигналов процессором роботизированного транспортного средства в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[038] На фиг. 6A представлен график первого сигнала от первого датчика колебаний, демонстрирующий допустимые колебания, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
[039] На фиг. 6Б представлен график первого сигнала от первого датчика колебаний, демонстрирующий колебания с высоким риском, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
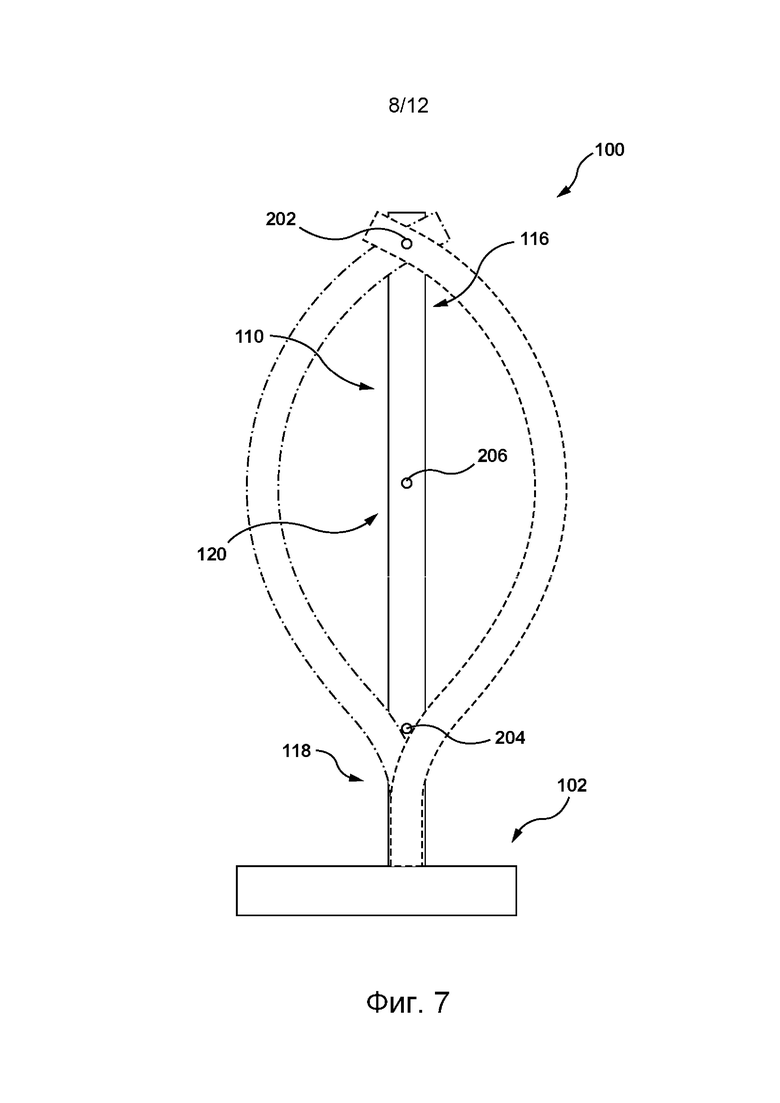
[040] На фиг. 7 представлен вид сбоку роботизированного транспортного средства со средней частью стойки роботизированного транспортного средства, совершающей колебания, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
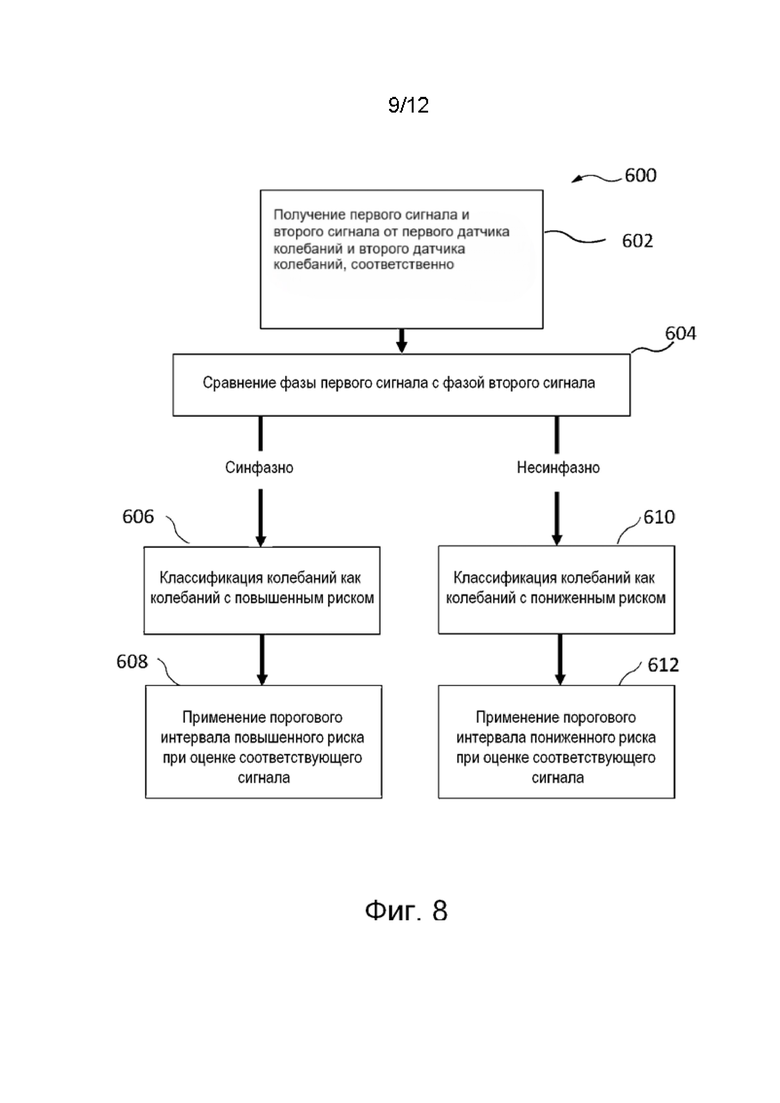
[041] На фиг. 8 представлена блок-схема управления роботизированным транспортным средством при получении сигналов процессором роботизированного транспортного средства в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
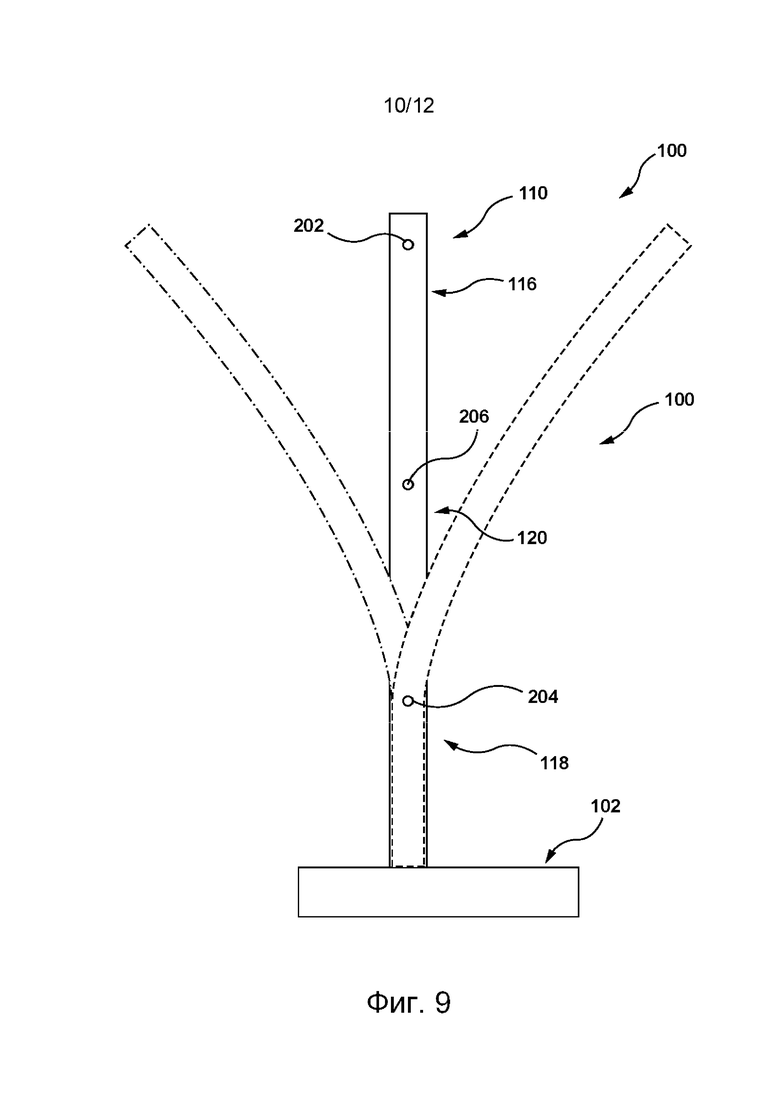
[042] На фиг. 9 представлен вид сбоку роботизированного транспортного средства со средней частью стойки роботизированного транспортного средства, совершающей колебания, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
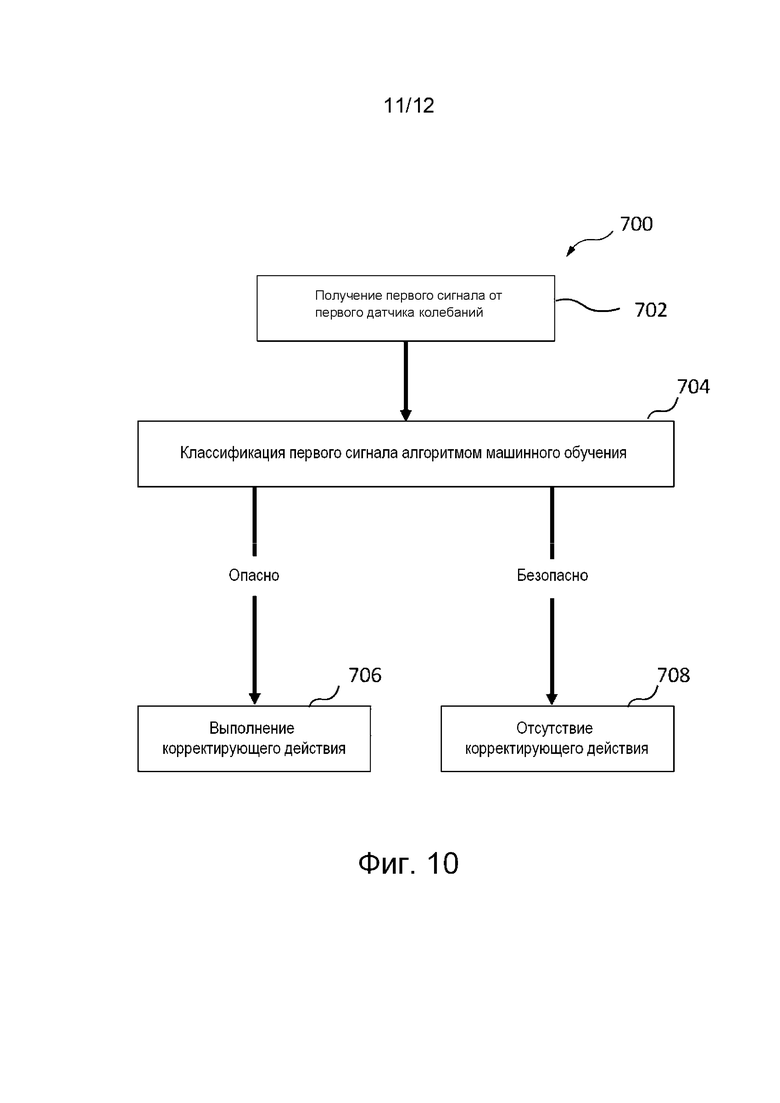
[043] На фиг. 10 представлена блок-схема процесса управления роботизированным транспортным средством при реализации алгоритма машинного обучения в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
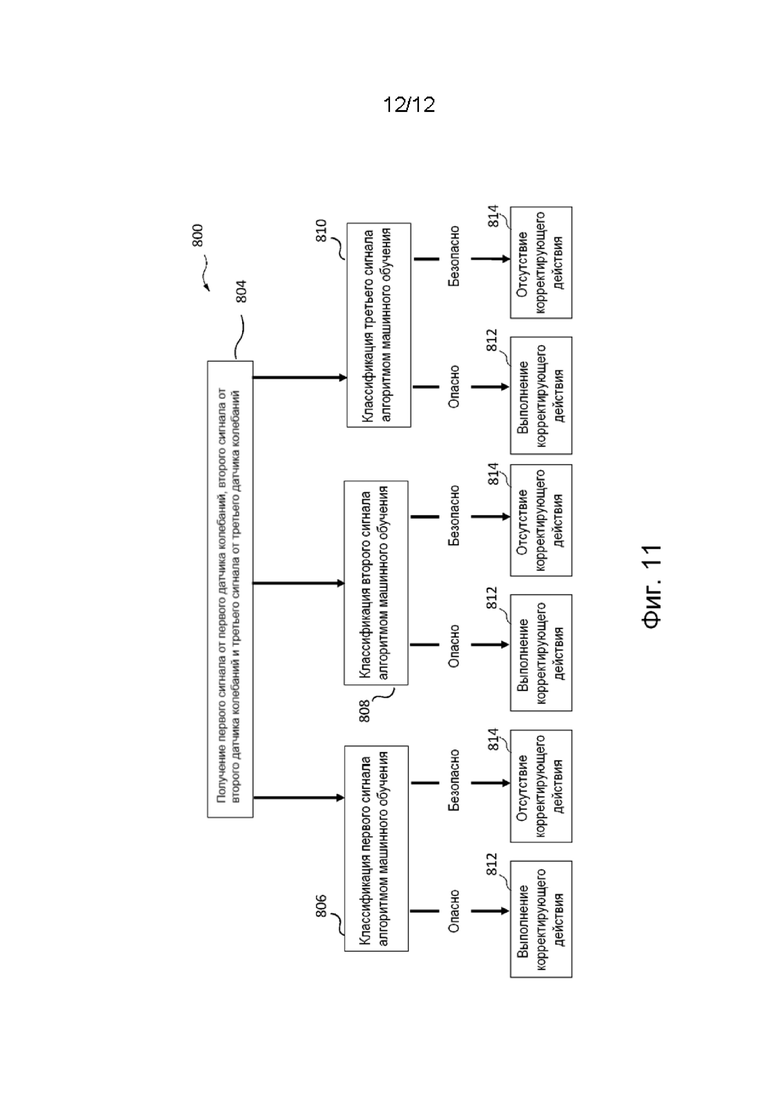
[044] На фиг. 11 представлена блок-схема процесса управления роботизированным транспортным средством при реализации алгоритма машинного обучения в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии.
Осуществление изобретения
[045] На фиг. 1-3 изображено роботизированное транспортное средство 100. В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, роботизированное транспортное средство 100 представляет собой робот-инвентаризатор 100, который может использоваться для перемещения различных предметов, хранящихся на складе, из одного места в другое, в частности, из места хранения в место обработки или отгрузки на складе. Такие предметы могут включать в себя, среди прочего, пищевые продукты, промышленные товары, сырье, используемое для производства различных продуктов и изделий и т.п. В общем случае на складе могут быть установлены складские стеллажи с несколькими уровнями полок для хранения предметов. Предметы могут храниться на полках складских стеллажей как по отдельности, так и в контейнерах соответствующих размеров, например, на поддонах.
[046] Робот-инвентаризатор 100 способен передвигаться вдоль складских стеллажей (которые, как правило, образуют проходы на складе) и перемещать предметы, хранящиеся на полках складских стеллажей, в другие места на складе. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии робот-инвентаризатор 100 может содержать сканирующие датчики для сканирования предметов на полках в целях наблюдения и/или выбора предметов, подлежащих перемещению. В одном из примеров робот-инвентаризатор 100 сканирует предметы, хранящиеся на полках, и определяет конкретный предмет, который необходимо переместить. Затем робот-инвентаризатор 100 забирает предмет с полки и перемещает его в нужное место.
[047] Как показано на фиг. 1, робот-инвентаризатор 100 содержит подвижную платформу 102 и избирательно удлиняемую раму 110, отходящую наружу от подвижной платформы 102.
[048] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, как показано на фиг. 1, подвижная платформа 102 может иметь верхнюю поверхность (отдельно не обозначена), проходящую по существу параллельно опорной поверхности, по которой передвигается робот-инвентаризатор 100, такой как пол склада. На форму верхней поверхности подвижной платформы 102 не накладывается ограничений и в различных не имеющих ограничительного характера вариантах осуществления настоящей технологии эта поверхность может иметь круглую, прямоугольную, квадратную, овальную и любую другую форму. Как показано на фиг. 1, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии подвижная платформа 102 может иметь форму параллелепипеда, каждая грань которого может представлять собой прямоугольник. На материал подвижной платформы 102 не накладывается ограничений и таким материалом могут быть, например, различные пластмассы или металлы, в частности, оцинкованная или нержавеющая сталь.
[049] Как показано на фиг. 3, подвижная платформа 102 может иметь колеса 104, прикрепленные к нижней поверхности 106 подвижной платформы 100 и способные перемещаться по опорной поверхности. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии каждое колесо 104 подвижной платформы 102 (когда оно прикреплено к нижней поверхности 106 подвижной платформы 102) способно вращаться только вокруг своей горизонтальной оси, проходящей через центр колеса, что позволяет подвижной платформе 102 осуществлять линейное перемещение вдоль опорной поверхности. Соответственно, вращение колес 104 против часовой стрелки обеспечивает движение подвижной платформы 102 и, как следствие, робота-инвентаризатора 100 в направлении вперед, которое для ясности обозначено здесь как направление 108 движения. И наоборот, вращение колес по часовой стрелке обеспечивает движение подвижной платформы 102 и, как следствие, робота-инвентаризатора 100 в направлении назад.
[050] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии подвижная платформа 102 может иметь колеса 104, распределенные по нижней поверхности 108. Например, подвижная платформа 102 может иметь по меньшей мере передние колеса, размещенные в передней части нижней поверхности 106, и по меньшей мере задние колеса, размещенные в задней части нижней поверхности 106. Передние колеса подвижной платформы 102 способны вращаться вокруг вертикальной оси (проходящей перпендикулярно нижней поверхности 106 подвижной платформы 102), чтобы подвижная платформа 102 могла поворачивать вправо и влево при перемещении в направлении 108 движения. В дополнительных не имеющих ограничительного характера вариантах осуществления настоящей технологии каждое из колес 104 подвижной платформы способно поворачиваться вокруг своей оси на угол 90°, что дает подвижной платформе 102 возможность перемещаться в поперечном направлении 108. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии каждое из колес 104 подвижной платформы 102 способно поворачиваться вокруг своей оси на любой угол, что дает подвижной платформе 102 возможность перемещаться в разных направлениях.
[051] Следует понимать, что в объем настоящей технологии включены разные конструкции колес 104 подвижной платформы 102. В частности, колеса 104 могут быть выполнены в виде самоориентирующихся колес, имеющих любой подходящий размер, например, диаметр от 1 до 10 см, и/или рассчитанных на соответствующий диапазон нагрузки, действующей на колеса 104, включая массу подвижной платформы 102, избирательно удлиняемой рамы 110 и дополнительного оборудования, установленного внутри робота-инвентаризатора 100, например, менее 250 кг, от 250 до 1000 кг и более 1000 кг. При этом на материал колес 104 подвижной платформы 102 не накладывается ограничений и в конкретных не имеющих ограничительного характера вариантах осуществления настоящей технологии таким материалом может быть, например, вязкая сталь, фенольный нейлон или полиуретан. Кроме того, без отступления от существа и объема настоящей технологии предусмотрены и такие варианты осуществления, в которых колеса 104 подвижной платформы 102 снабжены гусеничными лентами.
[052] Для приведения в движение колес 104 с целью перемещения подвижной платформы 102 робот-инвентаризатор 100, в соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии, может содержать привод платформы (отдельно не обозначен), представляющий собой, например, вращательный привод, чей вал соединен с осями всех передних и задних колес, чтобы сообщать им крутящий момент, вызывая вращение колес 104 и, как следствие, перемещение подвижной платформы 102. Например, вал привода платформы может быть соединен с осями колес 104 через трансмиссию подвижной платформы 102, которая обеспечивает передачу крутящего момента от вала привода на каждое из колес 104.
[053] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии трансмиссия подвижной платформы 102 способна передавать крутящий момент от привода платформы на каждое из колес 104 отдельно. Иными словами, в таких вариантах осуществления трансмиссия подвижной платформы 102 способна обеспечивать привод на все колеса.
[054] При этом на реализацию вращательного привода, обеспечивающего движение колес 104 подвижной платформы 102, не накладывается ограничений. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии вращательный привод может быть реализован в виде электродвигателя. В конкретном не имеющем ограничительного характера примере электродвигателем может быть какой-либо из серводвигателей MicroFlex e190, выпускаемых компанией ABB Ltd, Affolternstrasse 44, 8050, Zurich, Switzerland (Швейцария). При этом следует отметить, что электродвигатель может быть реализован на базе любого другого подходящего оборудования, к которому относятся, среди прочего, бесщеточные и шаговые электродвигатели. Также следует отметить, что без отступления от существа и объема настоящей технологии для реализации привода платформы могут использоваться и другие типы двигателей, в том числе, например, пневматические и гидравлические двигатели. Привод платформы может быть установлен, например, внутри подвижной платформы 102, в отсеке, образованном ее поверхностями.
[055] Кроме того, для управления приводом платформы, а также другими электрическими и электронными элементами робота-инвентаризатора 100, как поясняется в приведенном ниже описании, робот-инвентаризатор 100, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, может содержать контроллер (не показан).
[056] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии контроллер содержит процессор. В некоторых вариантах осуществления настоящей технологии процессор может содержать один или несколько процессоров и/или один или несколько микроконтроллеров, обеспечивающих исполнение команд и выполнение операций, связанных с работой робота-инвентаризатора 100. В различных не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор может быть реализован в виде однокристальной микросхемы, многокристальной микросхемы и/или других электрических элементов, содержащих одну или несколько интегральных схем и печатных плат. Процессор может дополнительно содержать модуль кэш-памяти для временного локального хранения команд, данных или дополнительной компьютерной информации. Например, процессор может содержать один или несколько процессоров либо один или несколько контроллеров, предназначенных для выполнения тех или иных задач обработки в роботе-инвентаризаторе 100, или один многофункциональный процессор или контроллер. Кроме того, явное использование термина «процессор» или «контроллер» не должно трактоваться как указание исключительно на аппаратные средства, способные обеспечивать работу программного обеспечения, и может подразумевать, среди прочего, аппаратные средства цифрового сигнального процессора (DSP), сетевой процессор, специализированную интегральную схему (ASIC), программируемую вентильную матрицу (FPGA), ПЗУ для хранения программного обеспечения, ОЗУ и энергонезависимое ЗУ.
[057] Также в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, контроллер может содержать модуль связи (не показан). Такой модуль связи может устанавливать связь по одному из протоколов связи (беспроводной или проводной), обеспечивая подключение процессора к другим электронным устройствам или удаленным серверам. Примерами реализации модуля связи, среди прочего, являются модуль связи Bluetooth™, модуль связи UART™, модуль связи Wi-Fi™, модуль связи LTE™ и т.п.
[058] В соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии, связь между контроллером и другими электрическими и электронными элементами робота-инвентаризатора 100, такими как привод платформы (не показан), как должно быть понятно из приведенного ниже описания, может осуществляться через одну или несколько внутренних и/или внешних шин (таких как шина PCI, шина USB, шина FireWire стандарта IEEE 1394, шина SCSI, шина Serial-ATA и т.д.), с которыми совместимы все эти электрические и электронные элементы. Контроллер может быть размещен, например, в отсеке, образованном поверхностями подвижной платформы 102.
[059] Таким образом, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, процессор контроллера способен за счет исполнения соответствующих команд управления осуществлять управление приводом платформы и, как следствие, движением подвижной платформы 102, которое предусматривает, среди прочего, (1) инициирование и прекращение движения подвижной платформы 102, (2) выбор направления 108 движения подвижной платформы 102, (3) регулирование параметров движения подвижной платформы 102 в направлении 108 движения, таких как текущая скорость и текущее ускорение, (4) маневрирование подвижной платформы 102 и т.п. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии команды управления могут передаваться в процессор в режиме реального времени от удаленного электронного устройства или от сервера через соответствующий канал связи, как описано выше, тем самым обеспечивая управление движением робота-инвентаризатора 100 в режиме реального времени. При этом в других не имеющих ограничительного характера вариантах осуществления настоящей технологии команды управления могут предварительно загружаться в запоминающее устройство, соединенное с процессором, например, чтобы обеспечивать движение робота-инвентаризатора 100 по определенным маршрутам. В таких вариантах осуществления команды управления могут периодически обновляться.
[060] Как показано на фиг. 1 и 3, избирательно удлиняемая рама 110 содержит по меньшей мере две вертикально-подвижные секции, а именно первую вертикально-подвижную секцию 112 и вторую вертикально-подвижную секцию 114. Одна из первой и второй вертикально-подвижных секций 112, 114, например, первая вертикально-подвижная секция 112, содержит первую стойку 111 и вторую стойку 113, которые соединены друг с другом поперечной соединительной секцией 115. Первая и вторая стойки 111, 113 первой вертикально-подвижной секции 112 прикреплены к подвижной платформе 102, а стойки второй вертикально-подвижной секции 114 фиксируются на первой и второй стойках 111, 113 первой вертикально-подвижной секции 112 на заданном уровне относительно них, что позволяет устанавливать требуемое значение длины избирательно удлиняемой рамы 110.
[061] В соответствии с различными не имеющими ограничительного характера вариантами осуществления настоящей технологии, на способ крепления первой и второй стоек 111, 113 первой вертикально-подвижной секции 112 к подвижной платформе 102 не накладывается ограничений. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первая и вторая стойки 111, 113 могут быть приварены к подвижной платформе 102. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии первая и вторая стойки 111, 113 могут быть прикреплены к подвижной платформе 102 с помощью крепежных элементов, таких как элементы болтового соединения.
[062] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первая и вторая стойки 111, 113 могут быть прикреплены к подвижной платформе 102 так, чтобы первая вертикально-подвижная секция 112 и, соответственно, избирательно удлиняемая рама 110 были по существу перпендикулярными подвижной платформе 102. При этом в других не имеющих ограничительного характера вариантах осуществления настоящей технологии первая и вторая стойки 111, 113 могут быть прикреплены к подвижной платформе 102 так, чтобы первая вертикально-подвижная секция 112 образовывала с подвижной платформой угол, не равный 90°. Иными словами, в таких вариантах осуществления избирательно удлиняемая рама 110 может быть наклонена либо вперед, либо назад относительно подвижной платформы 102. На угол между первой вертикально-подвижной секцией 112 и подвижной платформой 102 не накладывается ограничений и в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии этот угол может быть выбран так, чтобы горизонтальная проекция центра тяжести избирательно удлиняемой рамы 110 находилась в пределах периметра подвижной платформы 102.
[063] В дополнительных не имеющих ограничительного характера вариантах осуществления настоящей технологии избирательно удлиняемая рама 110 может быть дополнительно закреплена на подвижной платформе 102 с помощью тросов (не показаны), туго натянутых между верхней вертикально-подвижной секцией избирательно удлиняемой рамы 110, то есть второй вертикально-подвижной секцией 114, и подвижной платформой 102. К каждой боковой стороне второй вертикально-подвижной секции 114 относительно направления 108 движения робота-инвентаризатора 100 может быть прикреплено некоторое количество тросов, например, два троса. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии каждый трос может быть реализован в виде плетеного стального троса с сечением, выбранным, например, исходя из массы избирательно удлиняемой рамы 110.
[064] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, стойки каждой из первой и второй вертикально-подвижных секций 112, 114, например, первая и вторая стойки 111, 113 первой вертикально-подвижной секции 112, расположены поперек направления 108 движения робота-инвентаризатора 100. Кроме того, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первая и вторая стойки 111, 113 могут располагаться в целом параллельно друг другу. При этом в других не имеющих ограничительного характера вариантах осуществления настоящей технологии первая и вторая стойки 111, 113 могут располагаться под некоторым углом друг к другу. Например, первая и вторая стойки 111, 113 могут образовывать соответствующие рычаги с заданным углом наклона.
[065] На реализацию первой и второй стоек 111, 113 не накладывается ограничений. В различных не имеющих ограничительного характера вариантах осуществления настоящей технологии каждая из первой и второй стоек 111, 113 может иметь, среди прочего, треугольное, квадратное, прямоугольное, многогранное или круглое сечение. При этом в одних не имеющих ограничительного характера вариантах осуществления настоящей технологии каждая из первой и второй стоек 111, 113 является полой, а в других не имеющих ограничительного характера вариантах осуществления настоящей технологии - сплошной. На материал каждой из первой и второй стоек 111, 113 не накладывается ограничений и в различных не имеющих ограничительного характера вариантах осуществления настоящей технологии таким материалом может быть, среди прочего, металл (например, сталь или алюминий), пластмасса, дерево и др. На толщину каждой из первой и второй стоек 111, 113 также не накладывается ограничений и ее выбор может осуществляться, например, на основе компромисса между требуемой массой стойки и ее несущей способностью.
[066] Поперечная соединительная секция 115 может включать в себя множество поперечин, расположенных между первой и второй стойками 111, 113 и прикрепленных к ним, например, с использованием сварки. В других не имеющих ограничительного характера вариантах осуществления первая и вторая стойки 111, 113 и множество поперечин могут быть монолитными. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии конструкция и материал каждой из множества поперечин могут быть такими же, как у первой и второй стоек 111, 113. При этом в других не имеющих ограничительного характера вариантах осуществления настоящей технологии конструкция и материал каждой из множества поперечин могут отличаться от конструкции и материала первой и второй стоек 111, 113. Например, в таких вариантах осуществления каждая из первой и второй стоек 111, 113 может быть полой, а каждая из множества поперечин - сплошной. В другом примере каждая из первой и второй стоек 111, 113 в таких вариантах осуществления может иметь круглое сечение, а каждая поперечина - прямоугольное. В еще одном примере каждая из первой и второй стоек 111, 113 в таких вариантах осуществления может быть изготовлена из стали, а каждая поперечина - из алюминия.
[067] Кроме того, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, множество поперечин равномерно распределены между первой и второй стойками 111, 113 первой вертикально-подвижной секции 112, например, с заданным шагом, который может составлять, в частности, 20, 30 или 50 см. При этом в других не имеющих ограничительного характера вариантах осуществления настоящей технологии поперечины могут быть размещены только в некоторых частях пространства между первой и второй стойками 111, 113, например, на их концах и посередине.
[068] Кроме того, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии все поперечины из множества поперечин могут располагаться параллельно друг другу. В таких вариантах осуществления, если первая и вторая стойки 111, 113 также параллельны друг другу, то каждая из поперечин перпендикулярна первой и второй стойкам 111, 113. При этом в других не имеющих ограничительного характера вариантах осуществления настоящей технологии по меньшей мере некоторые из поперечин могут располагаться под заданным углом к стойке из первой и второй стоек 111, 113. Например, заданный угол может быть выбран равным, среди прочего, 30°, 45° и т.п.
[069] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии одни поперечины могут располагаться под первым заданным углом к стойке из первой и второй стоек 111, 113, а другие - под вторым заданным углом к этой стойке. Например, первый заданный угол может быть выбран равным 60°, а второй заданный угол - 120°. В другом примере первый и второй заданные углы между поперечинами и стойкой могут быть выбраны равными 45° и 135°, соответственно. Следует понимать, что поперечины могут располагаться между первой и второй стойками 111, 113 под более чем двумя углами к стойке и в различных не имеющих ограничительного характера вариантах осуществления настоящей технологии множество поперечин могут располагаться между первой и второй стойками 111, 113 под множеством заданных углов, в частности, под 3, 4, 5 или даже 10 разными заданными углами к стойке из первой и второй стоек 111, 113.
[070] Кроме того, очевидно, что в объем настоящей технологии включены разные варианты расположения поперечной соединительной секции 115. Например, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии множество поперечин поперечной соединительной секции 115, расположенных под разными заданными углами к стойке из первой и второй стоек 111, 113, могут образовывать различные периодически повторяющиеся структуры. Например, такая периодически повторяющаяся структура может представлять собой последовательность из (1) первой поперечины, расположенной под первым заданным углом, (2) второй поперечины, расположенной перпендикулярно, и (3) третьей поперечины, расположенной под вторым заданным углом к стойке из первой и второй стоек 111, 113 первой вертикально-подвижной секции 112. Без отступления от существа и объема настоящей технологии возможны и другие периодически повторяющиеся структуры, определяющие расположение множества поперечин в поперечной соединительной секции 115.
[071] Очевидно, что в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии вторая вертикально-подвижная секция 112 может быть выполнена подобно первой вертикально-подвижной секции 114.
[072] Кроме того, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии для обеспечения перемещения второй вертикально-подвижной секции 114 относительно первой вертикально-подвижной секции 112 каждая из первой и второй стоек 111, 113 первой вертикально-подвижной секции 112 может иметь направляющие (отдельно не обозначены), установленные вдоль каждой из первой и второй стоек 111, 113, а каждая из стоек (отдельно не обозначены) второй вертикально-подвижной секции 114 может иметь выступы (отдельно не показаны), сформированные вдоль каждой из этих стоек. Направляющие могут обеспечивать перемещение второй вертикально-подвижной секции 114 относительно первой вертикально-подвижной секции 112 за счет взаимодействия с этими выступами тем или иным образом. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии направляющие первой и второй стоек 111, 113 первой вертикально-подвижной секции 112 могут обеспечивать вхождение в них стоек второй вертикально-подвижной секции 114. Соответственно, такая конструкция первой и второй вертикально-подвижных секций 112, 114 позволяет избирательно увеличивать или уменьшать длину избирательно удлиняемой рамы 110 на требуемую длину.
[073] Длина первой и второй вертикально-подвижных секций 112, 114 не ограничивается и в общем случае выбирается в зависимости от требуемой максимальной длины (то есть от длины в полностью выдвинутом состоянии) избирательно удлиняемой рамы 110. Например, при требуемой максимальной длине избирательно удлиняемой рамы 110, равной четырем метрам, длина каждой из первой и второй вертикально-подвижных секций 112, 114 может составлять приблизительно два метра. При этом предусмотрены и такие варианты, в которых первая и вторая вертикально-подвижные секции 112, 114 имеют разные длины, в частности, один и три метра, соответственно, в приведенном выше примере. Кроме того, следует отметить, что для достижения требуемой максимальной длины избирательно удлиняемая рама 110 может содержать более двух, например, три или пять, вертикально-подвижных секций, каждая из которых может сдвигаться относительно предыдущей, как описано выше применительно к первой и второй вертикально-подвижным секциям 112, 114.
[074] Также, чтобы обеспечить перемещение второй вертикально-подвижной секции 114 относительно первой вертикально-подвижной секции 112, позволяющее избирательно увеличивать или уменьшать длину избирательно удлиняемой рамы 110, робот-инвентаризатор 100 в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии может дополнительно содержать привод рамы (не показан), вал которого связан со второй вертикально-подвижной секцией 114. В общем случае привод рамы способен (1) обеспечивать перемещение стоек второй вертикально-подвижной секции 114 по направляющим первой вертикально-подвижной секции 112, что позволяет первой и второй вертикально-подвижным секций 112, 114 избирательно выдвигаться и вдвигаться друг относительно друга, и (2) фиксировать вторую вертикально-подвижную секцию 114 на заданном уровне относительно первой вертикально-подвижной секции 112, устанавливая требуемую длину избирательно удлиняемой рамы 110.
[075] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии привод рамы может представлять собой вращательный привод, способный обеспечивать линейное перемещение второй вертикально-подвижной секции 114 по направляющим первой вертикально-подвижной секции 112. В таких вариантах осуществления привод рамы может быть реализован аналогично описанному выше приводу платформы.
[076] В других не имеющих ограничительного характера вариантах осуществления настоящей технологии привод рамы может представлять собой линейный привод. Как и в случае с описанным выше вращательным приводом, в различных не имеющих ограничительного характера вариантах осуществления настоящей технологии в качестве линейного привода может использоваться привод любого типа, например, электрический, пневматический или гидравлический привод. В конкретном не имеющем ограничительного характера примере линейным приводом может быть какой-либо из линейных электрических сервоприводов серии SGLF, выпускаемых компанией Yaskawa Electric Corporation, 2-1 Kurosakishiroishi, Yahatanishi-ku, Kitakyushu, 806-0004, Japan (Япония). При этом следует отметить, что линейный электрический сервопривод может быть реализован на базе любого другого подходящего оборудования.
[077] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, привод рамы, подобно приводу платформы, может быть связан с процессором контроллера робота-инвентаризатора 100, а процессор может на основе соответствующих команд управления обеспечивать перемещение приводом рамы второй вертикально-подвижной секции 114 относительно первой вертикально-подвижной секции 112 вверх или вниз (при ориентации, показанной на фиг. 1), заставляя избирательно удлиняемую раму 110 удлиняться или укорачиваться, соответственно, до требуемой длины.
[078] Следует отметить, что в тех вариантах осуществления, в которых избирательно удлиняемая рама 110 содержит более двух вертикально-подвижных секций, каждую из них, за исключением первой вертикально-подвижной секции 112, может приводить в движение отдельный привод рамы, реализованный подобно вышеописанному приводу рамы.
[079] При этом следует отметить, что без отступления от существа и объема настоящей технологии возможно и ручное приведение в движение второй вертикально-подвижной секции 114 относительно первой вертикально-подвижной секции 112 с фиксацией первой секции на заданном уровне относительно второй, например, путем установки штифтов в соответствующих отверстиях, выполненных в стойках каждой из первой и второй вертикально-подвижных секций 112, 114.
[080] В других не имеющих ограничительного характера вариантах осуществления настоящей технологии избирательно удлиняемая рама 110 может быть выполнена в виде телескопической рамы со складными первой и второй секциями 112, 114. В некоторых других не имеющих ограничительного характера вариантах осуществления настоящей технологии избирательно удлиняемая рама 110 может содержать более двух секций, способных складываться друг на друга. Как отмечалось выше, приведение в движение избирательно удлиняемой рамы 110, чтобы удлинять или укорачивать ее, может осуществляться с помощью электрического привода или вручную.
[081] Для контроля колебаний избирательно удлиняемой рамы 110 во время движения робота-инвентаризатора 100, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, робот-инвентаризатор 100 дополнительно содержит один или несколько датчиков колебаний, расположенных вдоль избирательно удлиняемой рамы 110, например, на стойке первой и/или второй вертикально-подвижных секций 112, 114. Один или несколько датчиков колебаний способны регистрировать движение стойки, например, ее колебания. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии один или несколько датчиков колебаний способны измерять параметры, связанные со скоростью, например, векторную скорость, угловую скорость, линейную скорость, смещение относительно предыдущего положения, угловое ускорение и/или линейное ускорение стойки. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии по меньшей мере один датчик колебаний представляет собой гироскоп, измеряющий угловую скорость. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии по меньшей мере один датчик колебаний представляет собой акселерометр, измеряющий линейное ускорение.
[082] Как показано на фиг. 1-3, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии на каждой стойке первой и второй вертикально-подвижных секций 112, 114 избирательно удлиняемой рамы 110, такой как первая и вторая стойки 113, 115 первой вертикально-подвижной секции 112 и/или второй вертикально-подвижной секции 114, могут быть расположены один или несколько датчиков колебаний.
[083] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии робот-инвентаризатор 100 содержит первый датчик колебаний 202, расположенный на стойке. В частности, первый датчик колебаний 202 установлен в верхней части 116 стойки второй вертикально-подвижной секции 114 для регистрации колебаний верхней части 116 этой стойки. Например, стойка может иметь длину 12 м, а первый датчик колебаний 202 может располагаться в верхней части 12-метровой стойки.
[084] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый датчик колебаний 202 связан с процессором робота-инвентаризатора 100. Как отмечалось выше, первый датчик колебаний 202 способен измерять параметр, связанный со скоростью, и передавать в процессор первый сигнал, характеризующий колебания верхней части 116 этой стойки. Процессор способен принимать первый сигнал и за счет этого обеспечивать контроль колебаний стойки в режиме реального времени и оценку необходимости выполнения корректирующих действий для предотвращения наклона или опрокидывания робота-инвентаризатора 100. Робот-инвентаризатор 100 может наклоняться или опрокидываться в результате вхождения в резонанс стойки (и, соответственно, избирательно удлиняемой рамы 110) и подвижной платформы 102. Иными словами, во время движения робота-инвентаризатора 100 частота колебаний стойки может приближаться к частоте колебаний подвижной платформы 102 или совпадать с ней, приводя к усилению колебаний стойки. Это, в свою очередь, вызывает увеличение амплитуды колебаний стойки, вследствие чего возникает наклон или, в худшем случае, опрокидывание робота-инвентаризатора 100, что создает угрозу для безопасности работников и может приводить к повреждению складских стеллажей, товаров и/или собственно робота-инвентаризатора 100. Таким образом, контроль колебаний стойки и обеспечение выполнения корректирующих действий в случае превышения колебаниями порогового уровня позволяют предотвращать наклон и опрокидывание робота-инвентаризатора 100.
[085] На фиг. 4 представлена блок-схема способа 300 управления роботом-инвентаризатором 100. В общем случае, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, способ 300 предусматривает получение первого сигнала от первого датчика колебаний 202 (шаг 302), получение первого опорного сигнала (шаг 304) и определение того, выходит ли первый сигнал за первый пороговый интервал, заданный относительно первого опорного сигнала (шаг 306). Если первый сигнал выходит за первый пороговый интервал, то для предотвращения наклона и опрокидывания робота-инвентаризатора 100 выполняются корректирующие действия (шаг 308). Если первый сигнал не выходит за первый пороговый интервал, корректирующие действия не выполняются. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый опорный сигнал задается заранее и может формироваться на основе различных параметров робота 100. Первый пороговый интервал также задается заранее, а его величина может быть как абсолютной, так и относительной. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии этот процесс может повторяться для обеспечения управления роботом-инвентаризатором 100 в режиме реального времени.
[086] На фиг. 6A и 6Б представлены примеры сигнала первого датчика колебаний 202 (т.е. первого датчика колебаний 202, расположенного в верхней части стойки). На фиг. 6A показан график линейного ускорения стойки по осям x, y и z, при котором колебания считаются допустимыми. На фиг. 6Б показан график линейного ускорения стойки по осям x, y и z, при котором колебания выходят за пороговый интервал и, соответственно, считаются колебаниями с высоким риском и требуют выполнения корректирующих действий.
[087] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии корректирующие действия выполняются в случае выхода сигнала за пороговый интервал, чтобы предотвратить наклон и опрокидывание робота-инвентаризатора 100. Как отмечалось выше, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии процессор робота-инвентаризатора 100 способен управлять двигателем (и, таким образом, регулировать скорость) робота-инвентаризатора 100. Соответственно, выполняемые им корректирующие действия включают в себя изменение текущей скорости робота-инвентаризатора 100 для рассинхронизации частот колебаний стойки и робота-инвентаризатора 100. Например, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии при этом уменьшается текущая скорость робота-инвентаризатора 100. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии текущая скорость робота-инвентаризатора 100 может увеличиваться. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии корректирующие действия могут включать в себя регулирование высоты избирательно удлиняемой рамы 110, регулирование высоты расположения контейнера (или перераспределение нескольких контейнеров) на избирательно удлиняемой раме 110 и/или отправку предупреждения для оповещения персонала склада.
[088] Как показано на фиг. 1-3, в соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии робот-инвентаризатор 100 содержит второй датчик колебаний 206 и третий датчик колебаний 204, расположенные по длине стойки.
[089] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии второй датчик колебаний 206 расположен между верхней частью 116 и нижней частью 118 стойки. Иными словами, второй датчик колебаний 206 находится в средней части 120 стойки. Второй датчик колебаний 206 связан с процессором робота-инвентаризатора 100. Как описано выше применительно к первому датчику колебаний202, второй датчик колебаний206 способен измерять параметр, связанный со скоростью, и передавать второй сигнал, характеризующий колебания средней части 120 стойки, в процессор, способный принимать второй сигнал.
[090] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии в нижней части 118 стойки первой вертикально-подвижной секции 112 расположен третий датчик колебаний 204 для регистрации колебаний нижней части 118 этой стойки. Третий датчик колебаний 204 связан с процессором робота-инвентаризатора 100. Как описано выше применительно к первому и второму датчикам колебаний 202, 206, третий датчик колебаний 204 способен измерять параметр, связанный со скоростью, и передавать третий сигнал, характеризующий колебания нижней части 118 стойки, в процессор, способный принимать третий сигнал.
[091] Следует понимать, что в других не имеющих ограничительного характера вариантах осуществления настоящей технологии первый, второй и третий датчики колебаний 202, 206, 204 могут быть связаны с соответствующими отдельными процессорами.
[092] На фиг. 5 представлена блок-схема способа 400 управления роботом-инвентаризатором 100 в соответствии с не имеющими ограничительного характера вариантами осуществления настоящей технологии. В общем случае способ 400 предусматривает получение первого, второго и третьего сигналов от первого, второго и третьего датчиков колебаний 202, 206, 204, соответственно, (шаг 402) и сравнение этих сигналов с первым, вторым и третьим опорными сигналами (шаг 404). Для каждого из первого, второго и третьего сигналов и соответствующих опорных сигналов определяется, выходит ли такой сигнал за пороговый интервал, заданный относительно соответствующего опорного сигнала (шаг 406). Иными словами, первый сигнал сравнивается с первым опорным сигналом, чтобы выяснить, выходит ли первый сигнал за первый пороговый интервал, второй сигнал сравнивается со вторым опорным сигналом, чтобы выяснить, выходит ли второй сигнал за второй пороговый интервал, а третий сигнал сравнивается с третьим опорным сигналом, чтобы выяснить, выходит ли третий сигнал за третий пороговый интервал. Если тот или иной сигнал выходит за соответствующий пороговый интервал, то выполняются корректирующие действия (шаг 408). Если сигнал не выходит за соответствующий пороговый интервал, корректирующие действия не выполняются (шаг 410). Как отмечалось выше, в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый, второй и третий опорные сигналы задаются заранее и могут формироваться на основе различных параметров робота 100. Первый, второй и третий пороговые интервалы также задаются заранее. Величины пороговых интервалов могут быть как абсолютными, так и относительными. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии этот процесс может повторяться для обеспечения управления роботом-инвентаризатором 100 в режиме реального времени.
[093] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии способ 400 предусматривает получение первого, второго и третьего сигналов (шаг 402) от соответствующих датчиков колебаний 202, 206, 204. Первый датчик колебаний 202 выдает первый сигнал, характеризующий колебания, которые испытывает верхняя часть 116 стойки. Второй датчик колебаний 206 выдает второй сигнал, характеризующий колебания, которые испытывает средняя часть 120 стойки. Третий датчик колебаний 204 выдает третий сигнал, характеризующий колебания, которые испытывает нижняя часть 118 стойки. В не имеющих ограничительного характера вариантах осуществления настоящей технологии первый, второй и третий датчики колебаний 202, 206, 204 равномерно распределены по длине стойки. Например, если длина стойки составляет 12 м, то первый датчик колебаний 202 может располагаться на высоте 12 м (верх стойки), второй датчик колебаний 206 - на высоте 6 м (середина стойки), а третий датчик колебаний 204 - на высоте 0 м (основание стойки). В других не имеющих ограничительного характера вариантах осуществления настоящей технологии первый, второй и третий датчики колебаний 202, 206, 204 могут быть равноудалены друг от друга, то есть расстояние от первого датчика колебаний 202 до второго датчика колебаний 206 может совпадать с расстоянием от второго датчика колебаний 206 до третьего датчика колебаний 204.
[094] В альтернативных не имеющих ограничительного характера вариантах осуществления настоящей технологии вместо нескольких опорных сигналов и пороговых интервалов в процессе сравнения каждого из сигналов, формируемых датчиками колебаний 202, 206, 204, может использоваться один опорный сигнал и один пороговый интервал.
[095] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии корректирующие действия выполняются в случае выхода первого, второго или третьего сигналов за пороговые интервалы, заданные относительно соответствующих пороговых сигналов. Как и в приведенном выше описании, корректирующие действия включают в себя изменение текущей скорости робота-инвентаризатора 100, например, уменьшение текущей скорости робота-инвентаризатора 100. В других не имеющих ограничительного характера вариантах осуществления настоящей технологии текущая скорость робота-инвентаризатора 100 может увеличиваться. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии корректирующие действия могут включать в себя регулирование высоты избирательно удлиняемой рамы 110, регулирование высоты контейнера на избирательно удлиняемой раме 110 и/или отправку предупреждения для оповещения персонала склада. Например, в одном из вариантов осуществления второй датчик колебаний 206 может выдавать второй сигнал, характеризующий ускорение. В этом примере второй пороговый интервал составляет от 0,5 до 2,0 м/с2. Если второй сигнал выходит за указанный второй пороговый интервал, выполняются корректирующие действия. В другом примере второй датчик колебаний 206 может выдавать второй сигнал, характеризующий угловую скорость. В этом примере второй пороговый интервал составляет от 0,02 до 0,06 м/с2. Если второй сигнал выходит за указанный второй пороговый интервал, выполняются корректирующие действия. В различных не имеющих ограничительного характера вариантах осуществления настоящей технологии первый и третий сигналы и соответствующие им пороговые интервалы могут быть реализованы аналогично второму сигналу и второму пороговому интервалу. При этом в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии первый, второй и третий сигналы, а также соответствующие им пороговые интервалы могут быть реализованы по-разному, а их значения могут выбираться специалистами в данной области техники в зависимости от конкретного варианта реализации.
[096] В некоторых не имеющих ограничительного характера вариантах осуществления получение сигналов, сравнение этих сигналов с соответствующими опорными сигналами и определение того, выходит ли каждый сигнал за соответствующий порог, могут осуществляться параллельно (как показано на фиг. 5). При этом в других не имеющих ограничительного характера вариантах осуществления настоящей технологии такие действия могут выполняться последовательно. Например, такие операции могут выполняться в порядке убывания риска. Иными словами, действия для тех частей стойки, колебания которых создают наибольший риск наклона и опрокидывания, могут выполняться в первую очередь, а для тех частей стойки, колебания которых создают наименьший риск, - в последнюю очередь.
[097] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии сигналы от первого, второго и третьего датчиков колебаний 202, 206, 204 могут использоваться для классификации различных типов колебаний, совершаемых стойкой, и для применения порогового интервала «повышенного риска» или порогового интервала «пониженного риска». После этого может производиться оценка уровня таких сигналов для определения того, выходят ли они за пороговый интервал повышенного риска или за пороговый интервал пониженного риска и требуется ли выполнять соответствующие корректирующие действия.
[098] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии может выполняться сравнение первого и второго сигналов, чтобы определить, находятся они в фазе или нет, и исходя из этого классифицировать колебания как колебания с повышенным риском или колебания с пониженным риском (как показано на фиг. 8). Когда сигналы синфазны, они совпадают по величине в каждый момент времени. Иными словами, минимумы и максимумы таких сигналов достигаются в одно и то же время и перекрываются. Как следствие, когда сигналы складываются друг с другом, их амплитуды суммируются, что приводит к усилению сигнала и в конечном итоге к увеличению амплитуды колебаний с повышением риска. И наоборот, когда сигналы не синфазны, они не совпадают по форме сигнала. В результате, когда сигналы складываются друг с другом, возникает их интерференция, что приводит к ослаблению сигнала и в конечном итоге к уменьшению амплитуды колебаний с понижением риска. Способ 600 предусматривает получение первого сигнала и второго сигнала от первого датчика колебаний 202 и второго датчика колебаний 206 (шаг 602), соответственно, и сравнение первого сигнала со вторым сигналом, чтобы определить, синфазны ли первый сигнал и второй сигнал (шаг 604). Если сигналы синфазны, то колебания классифицируются как колебания с повышенным риском (шаг 606) и применяется пороговый интервал повышенного риска (шаг 608). Если сигналы не синфазны, то колебания классифицируются как колебания с пониженным риском (шаг 610) и применяется пороговый интервал пониженного риска (шаг 612).
[099] Когда амплитуда колебаний в верхней части 116 стойки превышает амплитуду колебаний в нижней части 118 стойки, риск наклона и опрокидывания повышается (как показано на фиг. 7). При таких колебаниях с повышенным риском первый сигнал от первого датчика колебаний 202 и второй сигнал от второго датчика колебаний 206 оказываются синфазными. В результате для этих сигналов может использоваться пороговый интервал повышенного риска. Когда амплитуда колебаний в средней части 120 стойки превышает амплитуду колебаний в верхней и нижней частях 116, 118 стойки, риск наклона и опрокидывания снижается (как показано на фиг. 9). При таких колебаниях с пониженным риском первый сигнал от первого датчика колебаний 202 и второй сигнал от второго датчика колебаний 206 оказываются сдвинутыми по фазе. В результате для этих сигналов может использоваться пороговый интервал пониженного риска. Значения порогового интервала пониженного риска и порогового интервала повышенного риска различаются. Например, в связи с пониженным риском наклона и опрокидывания значения порогового интервала пониженного риска могут характеризоваться большей величиной допуска, чем значения порогового интервала повышенного риска.
[0100] Следует понимать, что может быть реализовано любое количество описанных выше способов 300, 400, 600 управления роботом-инвентаризатором 100 для предотвращения наклона в любых сочетаниях.
[0101] В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии способы 300, 400, 600 управления указанным роботом-инвентаризатором 100 могут применяться параллельно.
[0102] В других не имеющих ограничительного характера вариантах осуществления способы 300, 400, 600 могут применяться последовательно. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии способы 300, 400, 600 могут быть ранжированы по степени риска. Например, колебания верхней части 116 стойки с амплитудой, превышающей пороговое значение, создают более высокий риск наклона с опрокидыванием и, таким образом, могут оцениваться на первом этапе.
[0103] Следует понимать, что в некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии для управления роботом-инвентаризатором 100 может быть реализован алгоритм машинного обучения. Алгоритм машинного обучения может быть обучен на основе данных испытаний робота-инвентаризатора 100. Данные, собранные в ходе испытаний робота-инвентаризатора 100, классифицируются как данные «высокого риска» (то есть приводящие к наклону и/или опрокидыванию) или как данные «низкого риска» (то есть не приводящие к наклону и/или опрокидыванию). В частности, первый сигнал от первого датчика колебаний 202, второй сигнал от второго датчика колебаний 206 (если применимо) и третий сигнал от третьего датчика колебаний 204 (если применимо) регистрируются и классифицируются как указывающие на «высокий риск» или «низкий риск».
[0104] В некоторых вариантах осуществления настоящей технологии данные испытаний могут включать в себя множество обучающих наборов данных, содержащих обучающие входные данные, характеризующие обучающие сигналы, и метки, указывающие на класс («высокого риска» или «низкого риска»), к которому относятся эти обучающие сигналы. Следует отметить, что без отступления от существа и объема настоящей технологии множество обучающих наборов данных может быть сгруппировано по скоростям движения робота-инвентаризатора 100. Предполагается, что обучающие входные данные могут дополнительно включать в себя скорость робота-инвентаризатора 100, с которой двигался робот-инвентаризатор 100 в момент регистрации датчиком соответствующего обучающего сигнала.
[0105] В общем случае алгоритмы машинного обучения могут использоваться для обработки сигналов датчиков колебаний в различных областях применения, таких как вибрационный анализ, контроль состояния конструкций и диагностика неисправностей. Такие алгоритмы используют данные, формируемые датчиками колебаний, для получения ценной информации и принятия взвешенных решений, например, на основе классификации сигналов. В одном из вариантов осуществления алгоритмом машинного обучения может быть нейронная сеть (NN, Neural Network), реализованная на базе процессора. Нейронная сеть представляет собой вычислительную модель, состоящую из взаимосвязанных узлов или искусственных нейронов, разделенных на слои. Эти узлы взаимодействуют друг с другом, обрабатывая данные и обучаясь на них, что позволяет использовать нейронные сети в методах машинного обучения и глубокого обучения. В некоторых вариантах осуществления алгоритм машинного обучения может быть реализован в виде модели глубокого обучения, такой как сверточная нейронная сеть (CNN, Convolutional Neural Network) или рекуррентная нейронная сеть (RNN, Recurrent Neural Network), способной обрабатывать, среди прочего, данные датчиков колебаний в целях классификации. Сверточные нейронные сети эффективно применяются для выделения признаков из сигналов датчиков, а рекуррентные нейронные сети пригодны для анализа последовательных данных.
[0106] На фиг. 10 представлена блок-схема способа 700 управления роботом-инвентаризатором 100 с использованием первого датчика колебаний 202. Способ 700 предусматривает получение первого сигнала от первого датчика колебаний (шаг 702) и передачу сигнала в алгоритм машинного обучения, который классифицирует первый сигнал как сигнал «высокого риска» или как сигнал «низкого риска» (шаг 704). Если сигнал классифицируется как сигнал «высокого риска», выполняются корректирующие действия (шаг 706). Если сигнал классифицируется как сигнал «низкого риска», корректирующие действия не выполняются (шаг 708).
[0107] На фиг. 11 представлена блок-схема способа 800 управления роботом-инвентаризатором 100 с использованием первого датчика колебаний 202, второго датчика колебаний 206 и третьего датчика колебаний 204. Способ 800 предусматривает получение первого сигнала от первого датчика колебаний, второго сигнала от второго датчика колебаний и третьего сигнала от третьего датчика колебаний (шаг 804) и классификацию этих сигналов с использованием алгоритма машинного обучения (шаги 806, 808, 810). Если сигнал классифицируется как сигнал «высокого риска», выполняются корректирующие действия (шаг 812). Если сигнал классифицируется как сигнал «низкого риска», корректирующие действия не выполняются (шаг 814).
[0108] В соответствии с некоторыми не имеющими ограничительного характера вариантами осуществления настоящей технологии, по длине стойки избирательно удлиняемой рамы 110 может быть расположено любое количество датчиков колебаний. В некоторых не имеющих ограничительного характера вариантах осуществления настоящей технологии на каждой секции избирательно удлиняемой рамы 110 может быть установлен один датчик колебаний. Например, избирательно удлиняемая рама 110 может быть выполнена в виде складной рамы, состоящей из четырех складных секций, и на каждой из этих четырех секций может быть расположен датчик колебаний для обеспечения обратной связи по колебаниям этой секции. В общем случае применение нескольких датчиков колебаний позволяет пользователям получать более детальное представление о том, как колеблется стойка во время эксплуатации.
[0109] Таким образом, некоторые не имеющие ограничительного характера варианты осуществления настоящей технологии позволяют более эффективно контролировать колебания стойки (и, соответственно, избирательно удлиняемой рамы 110) робота-инвентаризатора 100. Иными словами, за счет использования одного или нескольких датчиков колебаний, расположенных по длине стойки, можно контролировать колебания соответствующих частей стойки. Также некоторые не имеющие ограничительного характера варианты осуществления настоящей технологии позволяют более эффективно реагировать на увеличение амплитуды колебаний стойки (то есть на вхождение стойки в резонанс с подвижной платформой 102). В общем случае сигналы, формируемые одним или несколькими датчиками колебаний, принимаются процессором и если какой-либо из сигналов выходит за пороговый интервал, характеризующий допустимый диапазон колебаний, то выполняются корректирующие действия. Кроме того, при использовании множества датчиков колебаний может быть обеспечен более детализированный подход к контролю колебаний и реагированию на колебания с повышенным риском.
[0110] Следует отметить, что приведенное здесь описание относится к роботу-инвентаризатору 100, но настоящая технология может быть применена к любому роботизированному транспортному средству, колебания которого могут привести к его наклону и опрокидыванию.
[0111] Для специалиста в данной области могут быть очевидными возможные изменения и усовершенствования описанных выше вариантов осуществления настоящей технологии. Предшествующее описание приведено лишь в иллюстративных целях, а не для ограничения объема изобретения. Объем охраны настоящей технологии определяется исключительно объемом приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесный узел для роботизированного транспортного средства и оснащенное им роботизированное транспортное средство. | 2023 |
|
RU2831446C1 |
| ОТКРЫВАЮЩИЙ МЕХАНИЗМ КРЫШКИ РОБОТИЗИРОВАННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2021 |
|
RU2810933C2 |
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОМ | 2021 |
|
RU2800529C1 |
| Роботизированное транспортное средство для доставки товаров | 2023 |
|
RU2829939C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО И МЕХАНИЗМ УПРАВЛЕНИЯ ЕГО КРЫШКОЙ | 2022 |
|
RU2831317C2 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА, ОСНАЩЕННАЯ ПОЗИЦИОНЕРАМИ ПЛАТФОРМ, И РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО, ОСНАЩЕННОЕ ПОЗИЦИОНЕРАМИ ПЛАТФОРМ | 2023 |
|
RU2831415C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ СРЕДСТВО И ОПОРНЫЙ УЗЕЛ ЕГО КОЛЕСА | 2022 |
|
RU2830639C2 |
| Способ управления роботизированным транспортным средством | 2021 |
|
RU2808469C2 |
| ПОДЪЕМНЫЙ УЗЕЛ, ОСНАЩЕННАЯ ИМ ПЛАТФОРМА И СКЛАДСКОЙ РОБОТ | 2024 |
|
RU2841430C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ФОРМИРОВАНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2024 |
|
RU2839125C1 |



Группа изобретений относится к роботизированным транспортным средствам, предназначенным для транспортирования предметов на складе. Техническим результатом является детекция колебательных движений рамы робота для уменьшения колебательного движения рамы и предотвращение опрокидывания робота. Способ управления роботизированным транспортным средством, содержащим платформу, выполненную с возможностью перемещения по поверхности склада, продольный корпус, размещенный на платформе, датчик, расположенный на продольном корпусе, и процессор, связанный с датчиком, причем способ содержит этапы: получение сигнала, формируемого датчиком и характеризующего колебательное движение продольного корпуса при работе роботизированного транспортного средства на поверхности склада; получение опорного сигнала, характеризующего нормальное рабочее состояние роботизированного транспортного средства; и изменение текущей скорости роботизированного транспортного средства для уменьшения колебательного движения продольного корпуса при выходе сигнала за пороговый интервал, заданный относительно опорного сигнала. 3 н. и 14 з.п. ф-лы, 11 ил.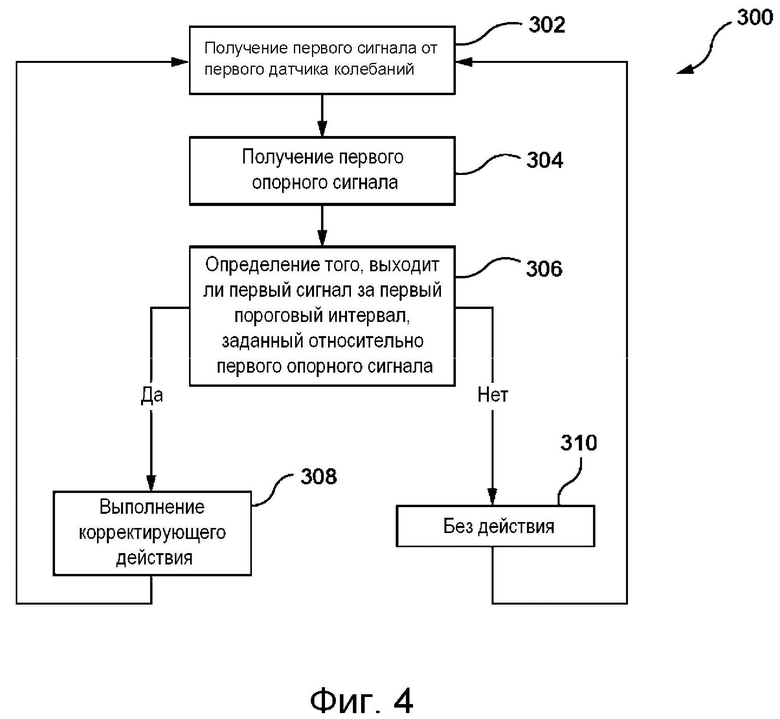
1. Способ управления роботизированным транспортным средством, содержащим
платформу, выполненную с возможностью перемещения по поверхности склада,
продольный корпус, размещенный на платформе,
датчик, расположенный на продольном корпусе, и
процессор, связанный с датчиком, причем способ предусматривает:
- получение сигнала, формируемого датчиком и характеризующего колебательное движение продольного корпуса при работе роботизированного транспортного средства на поверхности склада;
- получение опорного сигнала, характеризующего нормальное рабочее состояние роботизированного транспортного средства; и
- изменение текущей скорости роботизированного транспортного средства для уменьшения колебательного движения продольного корпуса при выходе сигнала за пороговый интервал, заданный относительно опорного сигнала.
2. Способ по п. 1, в котором изменение текущей скорости роботизированного транспортного средства включает в себя уменьшение текущей скорости роботизированного транспортного средства.
3. Способ по п. 1, в котором:
- продольный корпус имеет верхний конец и нижний конец, соединенный с платформой;
- датчик представляет собой первый датчик, расположенный на верхнем конце продольного корпуса, а сигнал представляет собой первый сигнал, характеризующий колебательное движение верхнего конца продольного корпуса;
- роботизированное транспортное средство содержит второй датчик, связанный с процессором и расположенный на части продольного корпуса, находящейся между верхним концом и нижним концом,
причем способ предусматривает:
- контроль второго сигнала, выдаваемого вторым датчиком и характеризующего колебательное движение этой части продольного корпуса; и
- изменение текущей скорости роботизированного транспортного средства для уменьшения колебательного движения этой части продольного корпуса при выходе второго сигнала за второй пороговый интервал, заданный относительно второго опорного сигнала.
4. Способ по п. 3, дополнительно предусматривающий:
- сравнение первого сигнала от первого датчика и второго сигнала от второго датчика; и
- определение того, какой риск несут колебания продольного корпуса - повышенный или пониженный, при этом колебания с повышенным риском имеют место, когда первый и второй сигналы синфазны, а колебания с пониженным риском имеют место, когда первый и второй сигналы не синфазны.
5. Способ по п. 4, в котором:
- в качестве порогового интервала принимается первый пороговый интервал повышенного риска, а в качестве второго порогового интервала принимается второй пороговый интервал повышенного риска, если определяется, что колебания несут повышенный риск; и
- в качестве порогового интервала принимается первый пороговый интервал пониженного риска, а в качестве второго порогового интервала принимается второй пороговый интервал пониженного риска, если определяется, что колебания несут пониженный риск, при этом первый пороговый интервал пониженного риска отличается от первого порогового интервала повышенного риска, а второй пороговый интервал пониженного риска отличается от второго порогового интервала повышенного риска.
6. Способ по п. 3, в котором роботизированное транспортное средство дополнительно содержит третий датчик, связанный с процессором и расположенный в нижней части, находящейся между вторым датчиком и нижним концом,
причем способ предусматривает:
- контроль третьего сигнала, выдаваемого третьим датчиком и характеризующего колебательное движение нижней части продольного корпуса; и
- изменение текущей скорости роботизированного транспортного средства для уменьшения колебательного движения нижней части продольного корпуса при выходе третьего сигнала за пороговый интервал, заданный относительно третьего опорного сигнала.
7. Способ по п. 1, в котором сигнал, формируемый датчиком, характеризует по меньшей мере одно из следующего: векторную скорость, угловую скорость, линейную скорость, смещение, угловое ускорение и линейное ускорение продольного корпуса.
8. Способ по п. 1, дополнительно предусматривающий переопределение положения контейнера по длине продольного корпуса и отправку предупреждения оператору.
9. Роботизированное транспортное средство для перемещения контейнеров по складу, содержащее:
- платформу, выполненную с возможностью перемещения по поверхности склада;
- продольный корпус, размещенный на платформе и предназначенный для размещения и перемещения контейнера;
- датчик, расположенный на продольном корпусе и предназначенный для формирования сигнала, характеризующего колебательное движение продольного корпуса; и
- по меньшей мере один процессор, связанный с датчиком и выполненный с возможностью принимать сигнал, формируемый датчиком, сравнивать этот сигнал с опорным сигналом и изменять текущую скорость роботизированного транспортного средства для уменьшения колебательного движения продольного корпуса при выходе этого сигнала за пороговый интервал, заданный относительно опорного сигнала.
10. Роботизированное транспортное средство по п. 9, в котором продольный корпус имеет верхний конец и нижний конец, соединенный с платформой, а датчик представляет собой первый датчик, предназначенный для формирования первого сигнала и расположенный на верхнем конце продольного корпуса так, чтобы первый сигнал, формируемый первым датчиком, характеризовал колебательное движение верхнего конца продольного корпуса.
11. Роботизированное транспортное средство по п. 10, дополнительно содержащее второй датчик, расположенный на части продольного корпуса, находящейся между верхним концом и нижним концом продольного корпуса, и предназначенный для формирования второго сигнала, характеризующего колебательное движение этой части продольного корпуса, и по меньшей мере один процессор, связанный со вторым датчиком и выполненный с возможностью:
- принимать второй сигнал, формируемый вторым датчиком;
- сравнивать второй сигнал со вторым опорным сигналом; и
- изменять текущую скорость роботизированного транспортного средства для уменьшения колебательного движения этой части продольного корпуса при выходе второго сигнала за второй пороговый интервал, заданный относительно второго опорного сигнала.
12. Роботизированное транспортное средство по п. 11, в котором первый датчик и второй датчик равномерно распределены по длине продольного корпуса.
13. Роботизированное транспортное средство по п. 11, дополнительно содержащее третий датчик, расположенный в нижней части продольного корпуса, находящейся между нижним концом и вторым датчиком, и предназначенный для формирования третьего сигнала, характеризующего колебательное движение нижней части продольного корпуса, и по меньшей мере один процессор, связанный с третьим датчиком и выполненный с возможностью:
- принимать третий сигнал, формируемый третьим датчиком;
- сравнивать третий сигнал с третьим опорным сигналом; и
- изменять текущую скорость роботизированного транспортного средства для уменьшения колебательного движения нижней части продольного корпуса при выходе третьего сигнала за третий пороговый интервал, заданный относительно третьего опорного сигнала.
14. Роботизированное транспортное средство по п. 13, в котором первый, второй и третий датчики равномерно распределены по длине продольного корпуса.
15. Роботизированное транспортное средство по п. 9, в котором продольный корпус является складным и содержит первый корпус, шарнирно соединенный со вторым корпусом.
16. Роботизированное транспортное средство по п. 9, в котором длина продольного корпуса превышает длину платформы.
17. Способ управления роботизированным транспортным средством, содержащим платформу, выполненную с возможностью перемещения по поверхности склада, продольный корпус, размещенный на платформе, датчик, расположенный на продольном корпусе, и процессор, связанный с датчиком, причем способ предусматривает:
- получение сигнала, формируемого датчиком и характеризующего колебательное движение продольного корпуса при работе роботизированного транспортного средства на поверхности склада;
- передачу этого сигнала для определения прогнозного класса в алгоритм машинного обучения, обученный определению принадлежности сигнала к первому или второму классу на основе обучающего сигнала и метки, характеризующей принадлежность обучающего сигнала к первому или второму классу; и
- изменение текущей скорости роботизированного транспортного средства для уменьшения колебательного движения продольного корпуса в зависимости от прогнозного класса.
| CN 115593839 A, 13.01.2023 | |||
| CN 114647238 A, 21.06.2022 | |||
| US 20180057283 A1, 01.03.2018 | |||
| US 20210187760 A1, 24.06.2021 | |||
| EP 3283407 B1, 20.09.2023 | |||
| US 20120035762 A1, 09.02.2012 | |||
| Способ удержания угольного струга, работающего на пластах крутого падения при обрыве верхнего тягового каната | 1961 |
|
SU147983A1 |

