Область техники, к которой относится изобретение
Изобретение относится к области электротехники, технической физики и предназначено для создания в пространстве переменного низкочастотного магнитного поля с известными пространственными и временными характеристиками, используемого в магнитометрических системах локальной аэронавигации в качестве навигационного.
Устройство может быть использовано при разработке и создания магнитометрических систем локальной аэронавигации. [Голев И.М., Заенцева Т.И., Угрюмов и др. Магнитометрическая система локальной навигации беспилотных летательных аппаратов// Научный информационный сборник «ТРАНСПОРТ: наука, техника, управление» 2020, №10, С. 27-35].
Уровень техники
Наиболее близким по технической сущности является локальная система навигации с использованием низкочастотного магнитного поля [Голев И.М., Сергеев А.В. Локальная система навигации с использованием низкочастотного магнитного поля // Вестник Воронежского государственного технического университета. 2019. Т. 15. №5. С. 88-94.], состоящее из двух взаимно ортогонально расположенных соленоидов, содержащих первую и вторую катушки индуктивности размещенных на первом и втором магнитопроводах соответственно, последовательно соединенных генератора сигнала и фазовращателя, при этом, первые выводы первой и второй катушек индуктивности соединены между собой и заземлены, а магнитопроводы установлены в одной плоскости. Изменение температуры окружающей среды в месте расположения источника навигационного магнитного поля приводит к изменению величины индуктивности соленоидов, и как следствие к изменению амплитуды и фазы создаваемого ими низкочастотного переменного магнитного поля, что снижает стабильность параметров навигационного магнитного поля и как следствие приводит к снижению точности определения координат при решении навигационных задач.
Недостатком устройства является низкая точность определения координат при решении навигационных задач.
Раскрытие сущности изобретения
Техническим результатом изобретения является повышение точности определения местоположения и ориентации объекта навигации в пространстве, за счет повышения стабильности параметров низкочастотного навигационного магнитного поля.
Технический результат достигается тем, в устройство для создания низкочастотного навигационного магнитного поля, состоящее из двух взаимно ортогонально расположенных соленоидов, содержащих первую и вторую катушки индуктивности размещенных на магнитопроводах, последовательно соединенных генератора сигнала и фазовращателя, при этом, первые выводы первой и второй катушек индуктивности соединены между собой и заземлены, а магнитопроводы установлены в одной плоскости, дополнительно ведены третья и четвертая катушки индуктивности, первый и второй конденсаторы, последовательно соединенные датчик магнитного поля, блок измерения разности фаз, блок управления и источник постоянного тока, выход которого соединен с первыми выводами третьей и четвертой катушек индуктивности, вторые выводы которых соединены со вторым входом источника постоянного тока, кроме того выход генератора сигнала соединен с вторым входом блока измерения разности фаз и через первый конденсатор с вторым выводом первой катушки индуктивности, кроме того выход фазовращателя соединен через второй конденсатор с вторым выводом второй катушки индуктивности, при этом третья и четвертая катушки индуктивности намотаны на магнитопроводы первого и второго соленоидов соответственно.
Сущность изобретения заключается в том, что первый и второй соленоиды включены в последовательные колебательные контура, резонансные частоты которых равны и совпадают с частотой тока питающего их генератора. Токи в соленоидах создают в пространстве вращающееся переменное магнитное поле. При этом, на резонансной частоте, фазовый сдвиг между током на выходе генератора и переменным магнитным полем, создаваемым первым соленоидом, равен нулю Δϕ=0. При изменении температуры магнитопроводов изменяется их эффективная магнитная проницаемость, что приводит к изменению величины индуктивности первого и второго соленоидов, и соответственно к изменению резонансной частоты колебательных контуров. Появляется фазовый сдвиг между фазой тока генератора и фазой переменного магнитного поля (Δϕ≠0), создаваемого первым соленоидом. Это приводит к снижению стабильности параметров навигационного поля, что приводит к погрешностям при вычислении координат объекта навигации. Для устранения фазового сдвига стабилизируют величину индуктивности соленоидов за счет автоматического управления эффективной магнитной проницаемостью магнитопроводов. Управление осуществляется с помощью постоянного магнитного поля, создаваемого в объеме магнитопроводов с помощью третьей и четвертой катушек индуктивности, через которые протекают управляющие токи.
Датчик магнитного поля непрерывно измеряет параметры переменного магнитного поля, созданного первым соленоидом. В блоке измерения разности фаз определяется фазовый сдвиг между фазой тока на выходе генератора и фазой переменным магнитным полем, создаваемым первым соленоидом. При возникновении фазового сдвига между ними подается сигнал в блок управления, который регулирует величину тока источника постоянного тока для изменения тока в третьей и четвертой катушках индуктивности, что приводит к изменению эффективной магнитной проницаемости магнитопроводов и как следствие к восстановлению начальных значений индуктивностей первого и второго соленоида и стабилизации параметров низкочастотного навигационного магнитного поля.
Краткое описание фигур
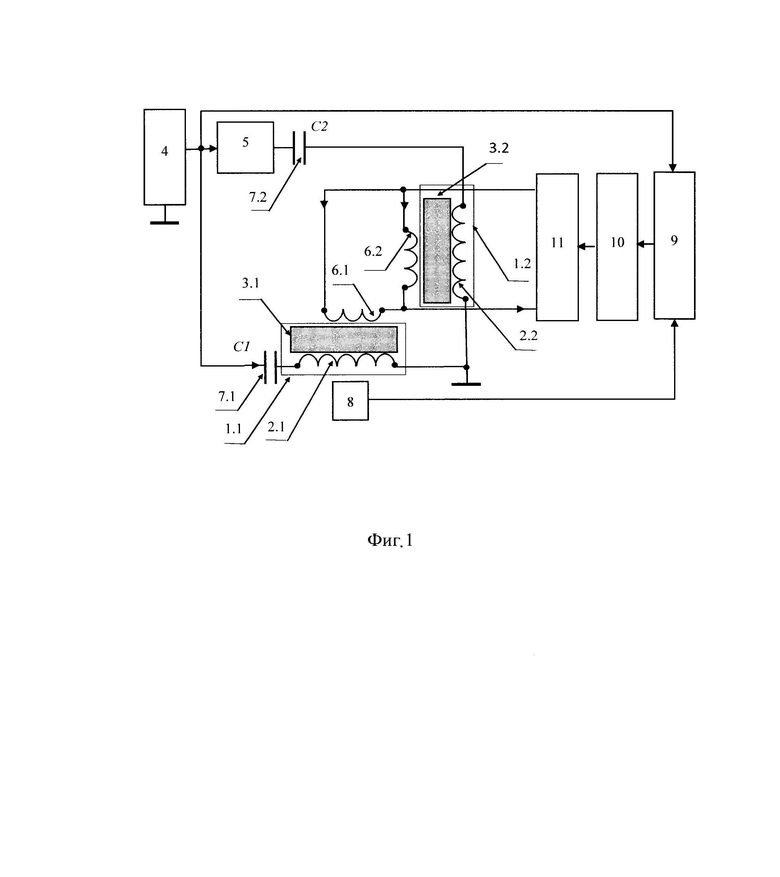
На фиг. 1 изображена схема устройства для создания низкочастотного навигационного магнитного поля, где обозначено:
1.1 и 1.2 - первый и второй соленоиды;
2.1 и 2.2 - первая и вторая катушки индуктивности;
3.1 и 3.2 - первый и второй магнитопровод;
4 - генератор сигнала;
5 - фазовращатель;
6.1 и 6.2 - третья и четвертая катушки индуктивности;
7.1 и 7.2 - первый и второй конденсаторы;
8 - датчик магнитного поля;
9 - блок измерения разности фаз;
10 - блок управления;
11 - источник постоянного тока.
Устройство для создания низкочастотного навигационного магнитного поля работает следующем образом. С генератора сигнала 4 сигнал поступает на блок измерения разности фаз 9 и на последовательные колебательные контура образованные первым 7.1 и вторым 7.2 конденсаторами и первым 1.1 и вторым 1.2 соленоидами соответственно. Резонансные частоты первого и второго контуров равны и совпадают с частотой генератора сигнала 4. В колебательных контурах протекает максимальный по амплитуде ток и в пространстве создается переменное магнитное поле, причем из-за сдвига фазы токов на 90°, первый соленоид 1.1 создает поле изменяющееся по закону косинуса, а второй 1.2 - по закону синуса [Голев И.М., Заенцева Т.И., Угрюмов Р.Б., и др. Магнитометрическая система локальной навигации беспилотных летательных аппаратов // Научный информационный сборник «ТРАНСПОРТ: наука, техника, управление» 2020, №10, С. 27-35].
Если резонансная частота колебательного контура выше частоты генератора сигнала 4, то фазовый сдвиг переменного магнитного поля будет положительным (Δϕ>0), а в случае, когда резонансная частота колебательного контура будет ниже частоты генератора сигнала, фазовый сдвиг переменного магнитного поля будет отрицательный (Δϕ<0). [Резонансные свойства RLC-цепей // сост. В.X. Осадченко, Я.Ю. Волкова, Ю.А. Кандрина. - Екатеринбург: Изд-во Урал, ун-та, 2013 - 64 с. (см. стр. 27)].
На магнитопроводах 3.1 и 3.2 дополнительно размещены две катушки индуктивности - третья 6.1 и четвертая 6.2 соответственно, через которые протекает ток источника постоянного тока 11, величина которого может изменяться под действием управляющего напряжения поступающего с блока управления 10. Таким образом в объеме магнитопроводов 3.1 и 3.2 может создаваться постоянное магнитное поле, которое изменяет его эффективную магнитную проницаемость μэ [Пасынков В.В. Материалы электронной техники: Учебник для студентов и вузов - М.: Высш. школа 1980. - 406 с., см. стр. 355].
Изменение температуры магнитопроводов вызывает изменение величины индуктивности первого 1.1 и второго 1.2 соленоидов и как следствие изменение резонансных частот колебательного контура, приводящих к появлению разности фаз отличной от нуля Δϕ≠0. С помощью датчика магнитного поля 8, размещенного вблизи первого соленоида 1.1 измеряются параметры создаваемого им в пространстве переменного магнитного поля. Выходной сигнал с датчика магнитного поля 8 подается на первый вход блока измерения разности фаз 9, а на второй вход, которого поступает напряжение с генератора сигнала 4, с помощью которого определяется разность фаз Δϕ между фазой тока генератора сигнала 4 и фазой создаваемым соленоидом 1.1 переменного магнитного поля. Сигнал с выхода блока измерения разности фаз 9 поступает на вход блока управления 10. Если разность фаз Δϕ отлична от нуля (или положительная или отрицательная), то с выхода блока управления 10 подается соответствующий управляющий сигнал на источник тока 11 такой величины и знака, что происходит соответствующие изменение тока в третьей 6.1 и четвертой 6.2 катушках индуктивностей, вызывающее изменение эффективной проницаемости магнитопроводов 3.1 и 3.2 в конечном итоге приводящее к восстановлению начального значения индуктивности соленоидов 1.1 и 1.2, и соответственно, резонансной частоты соответствующих колебательных контуров. Регулировка заканчивается при достижении значения разаности фаз Δϕ=0.
Таким образом, при изменении под действием внешних факторов величины индуктивностей соленоидов 1.1 и 1.2 возможно электрическим путем компенсировать эти изменения. Это позволяет в автоматическом режиме устранять возможные искажения параметров навигационного магнитного поля и повысить точность вычисления координат подвижных объектов.
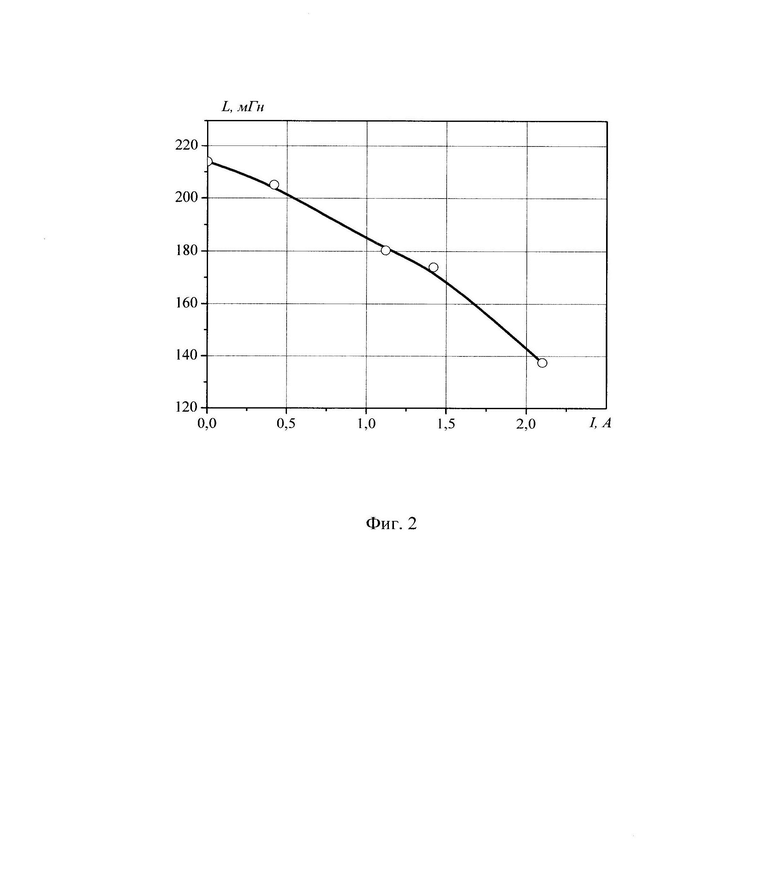
Для проверки работоспособности устройства был проведен эксперимент по исследованию возможностей электрического управления индуктивностью образца соленоида с помощью тока, протекающего в катушке индуктивности. На магнитопроводе из стали трансформаторной электротехнической анизотропной марки 3404 размером 50×50×350 мм3 был расположен намоточный каркас с дополнительной катушкой индуктивности и соленоидом, витки последнего были намотаны поверх дополнительной катушкой индуктивности. При пропускании через дополнительную катушку индуктивности тока в пределах от 0 до 2 А, постоянное магнитное поле, создаваемое током, протекающим через дополнительную катушку индуктивности, уменьшало магнитную эффективную проницаемость сердечника μ Это вызывало к уменьшение индуктивности соленоида от величины 212 мГн до 135 мГн (на 36%) (см. фиг. 2). Таким образом, проведенный эксперимент свидетельствует о работоспособности предлагаемого устройства.
Осуществление изобретения
Предложенное устройство может быть практически реализовано с помощью выпускаемых промышленностью электронных компонентов и изделий.
В качестве генератора сигнала 4 можно использовать двухканальный генератор сигналов AWG-4101, [https://www.aktakom.ru/kio/index.php?SECTION_ID=2087&ELEMENTJD=11289176].
В качестве источника постоянного тока 11 можно использовать источники питания с дистанционным управлением APS-7306L, [https://www.aktakom.ru/kio/index.php?SECTIONJD=2094&ELEMENT_ID=11289334].
Обмоточные провода соленоидов и катушек индуктивностей, тип и размер магнитопровода определяются требованиями к создаваемому навигационному магнитному полю.
В качестве датчика магнитного поля 8 можно использовать датчик Холла, двухполярный цифровой 70G Т092, который по однопроводной шине можно подключить к одноплатному компьютеру Raspberry Pi 4 Model В [https://amperka.ru/product/raspberry-pi-4-model-b-4-gb], на базе которого можно реализовать блок управления.
Блок измерения разности фаз 9 может быть реализован с помощью аппаратной платформы на базе микроконтроллера Arduino [http://digitrode.ru/computing-devices/mcu_cpu/3615-analiz-vzaimnoy-korrelyacii-signalov-s-pomoschyu-arduino.html].
Таким образом, в предлагаемом устройстве реализована возможность автоматической регулировки величины индуктивности соленоидов. Непрерывная подстройка индуктивностей соленоида устраняет искажения характеристик создаваемого навигационного магнитного поля, возникающих при изменении температуры магнитопровода и повышает точность определения координат при решении навигационных задач.
Следовательно, предлагаемое изобретение, обладая новизной, полезностью и реализуемостью, может быть применено в магнитометрических системах навигации и позиционирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО МАГНИТОМЕТРИЧЕСКОЙ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2789733C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНОГО ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ МАГНИТНОГО ПОЛЯ | 2019 |
|
RU2713456C1 |
| МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ | 2024 |
|
RU2824864C1 |
| УСТРОЙСТВО МАГНИТОМЕТРИЧЕСКОЙ СИСТЕМЫ ЛОКАЛЬНОЙ НАВИГАЦИИ | 2024 |
|
RU2835981C1 |
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ ВРАЩАЮЩЕГОСЯ ДИПОЛЬНОГО МАГНИТНОГО ПОЛЯ | 2022 |
|
RU2789734C1 |
| МОБИЛЬНОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ СКРЫТЫХ МЕТАЛЛИЧЕСКИХ ОБЪЕКТОВ | 2003 |
|
RU2251126C1 |
| МАГНИТОМЕТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ТЕЛА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2130619C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ И УГЛОВОГО ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1997 |
|
RU2119171C1 |
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ВОЗДЕЙСТВИЯ КОМБИНИРОВАННОГО МАГНИТНОГО ПОЛЯ НА КИНЕТИКУ БИОХИМИЧЕСКИХ ПРОЦЕССОВ В БИОЛОГИЧЕСКИХ СИСТЕМАХ, СОДЕРЖАЩИХ МАГНИТНЫЕ НАНОЧАСТИЦЫ | 2016 |
|
RU2673337C2 |
| МАГНИТОМЕТРИЧЕСКИЙ ДАТЧИК | 2010 |
|
RU2436112C1 |
Изобретение относится к области электротехники и предназначено для создания в пространстве переменного низкочастотного магнитного поля с известными пространственными и временными характеристиками, используемого в магнитометрических системах локальной аэронавигации в качестве навигационного. Сущность: устройство для создания низкочастотного навигационного магнитного поля состоит из двух взаимно ортогонально расположенных соленоидов, содержащих первую и вторую катушки индуктивности, размещенные на магнитопроводах, последовательно соединенных генератора сигнала и фазовращателя. Первые выводы первой и второй катушек индуктивности соединены между собой и заземлены. Магнитопроводы установлены в одной плоскости. В устройство дополнительно ведены третья и четвертая катушки индуктивности, намотанные на магнитопроводы первого и второго соленоидов соответственно, первый и второй конденсаторы, последовательно соединенные датчик магнитного поля, блок измерения разности фаз, блок управления и источник постоянного тока. Выход источника постоянного тока соединен с первыми выводами третьей и четвертой катушек индуктивности, вторые выводы которых соединены со вторым входом источника постоянного тока. Выход генератора сигнала соединен с вторым входом блока измерения разности фаз и через первый конденсатор с вторым выводом первой катушки индуктивности. Выход фазовращателя соединен через второй конденсатор с вторым выводом второй катушки индуктивности. Технический результат: повышение точности определения местоположения и ориентации объекта навигации в пространстве за счет повышения стабильности параметров низкочастотного навигационного магнитного поля. 2 ил.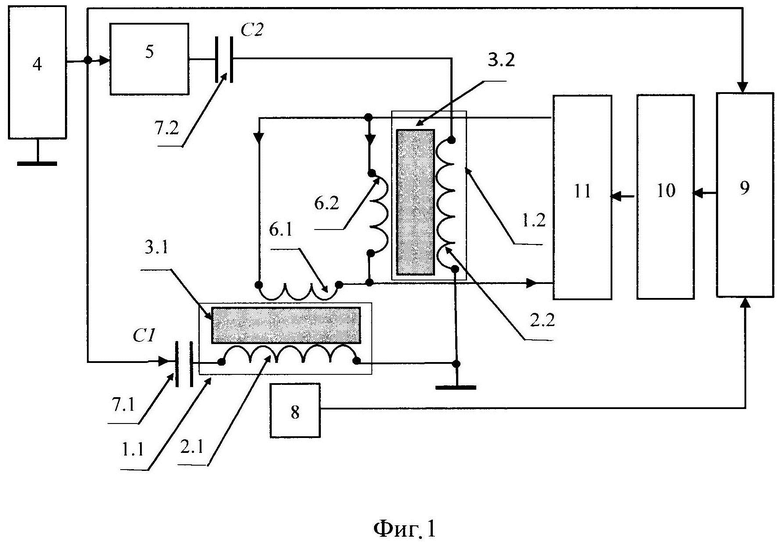
Устройство для создания низкочастотного навигационного магнитного поля, состоящее из двух взаимно ортогонально расположенных соленоидов, содержащих первую и вторую катушки индуктивности, размещенных на первом и втором магнитопроводах соответственно, последовательно соединенных генератора сигнала и фазовращателя, при этом первые выводы первой и второй катушек индуктивности соединены между собой и заземлены, а магнитопроводы установлены в одной плоскости, отличающееся тем, что дополнительно ведены третья и четвертая катушки индуктивности, первый и второй конденсаторы, последовательно соединенные датчик магнитного поля, блок измерения разности фаз, блок управления и источник постоянного тока, выход которого соединен с первыми выводами третьей и четвертой катушек индуктивности, вторые выводы которых соединены со вторым входом источника постоянного тока, кроме того выход генератора сигнала соединен с вторым входом блока измерения разности фаз и через первый конденсатор с вторым выводом первой катушки индуктивности, кроме того выход фазовращателя соединен через второй конденсатор с вторым выводом второй катушки индуктивности, при этом третья и четвертая катушки индуктивности намотаны на магнитопроводы первого и второго соленоидов соответственно.
| УСТРОЙСТВО ДЛЯ СОЗДАНИЯ НИЗКОЧАСТОТНОГО МАГНИТНОГО ПОЛЯ | 2020 |
|
RU2756606C2 |
| СПОСОБ СОЗДАНИЯ НАВИГАЦИОННОГО МАГНИТНОГО ПОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634046C1 |
| МАГНИТОМЕТРИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ | 2024 |
|
RU2824864C1 |
| CN 103575271 B, 05.04.2019 | |||
| УСТРОЙСТВО КОНТРОЛЯ СОПРОТИВЛЕНИЯ ИЗОЛЯЦИИ ЭЛЕКТРИЧЕСКОЙ СЕТИ ПОСТОЯННОГО ТОКА | 2011 |
|
RU2460082C1 |
| ГОЛЕВ И | |||
| М | |||
| и др | |||
| Магнитометрическая система локальной навигации беспилотных летательных аппаратов, Научный информационный сборник "ТРАНСПОРТ: наука, техника, управление" 2020, N10, с | |||
| Прибор с двумя призмами | 1917 |
|
SU27A1 |

